1
Изобретение относится к электротехнике, конкретно к регулируемым электрическим машинам различного назначения при работе их от преобразователей частоты.
Целью изобретения является уменьшение пульсаций момента вентильного электродвигателя (БД), расширение области применения, а также улучшение энергетических и кассогабарит- ных показателей ВД.
На фиг. 1 приведена векторная диаграмма изображающих векторов ВД при регулировании тока возбуждения электромеханического преобразователя
(ЭМП) ВД по предельной оси; на фиг. 2 - то же, по поперечной оси, на фиг. 3 - то же, по продольной и поперечной осям; на фиг. 4 - диаграмма токов и ЭДС ЭМП ВД; на фиг.5- устройство для осуществления способа.
Электромагнитный момент ВД определяется из соотношения:
й
00
о о
ий
ел
М V,f is
(«,
«X
dVfHs
(О
, Ј,
Дц - проекция основной сос0с
тавляющеи вектора результирующего потоко- сцепления на ось Ј, ортогональную направлению вектора тока якоря is ЭМП (ось f ), и ее постоянная и переменная составляющие.
Согласно выражению (1) момент БД пропорционален модулю вектора тока якоря и проекции основной составляющей вектора результирующего потоке- сцепления, создающего поток в зазоре, на направление, ортогональное вектору тока якоря.
Пульсации тока и момента БД обусловлены в общем случае измене- нием взаимного расположения магнитных осей обмотки якоря и индуктора на межкоммутационном интервале и дискретным переключением секций обмотки якоря на коммутационном интер- вале, вызывающим скачкообразное изменение взаимного расположения магнитных осей обмоток якоря и возбуждения, что сопровождается наведением в обмотке якоря модуляционных сое- тавляющих ЭДС вращения и трансформации. При этом векторы тока якоря и результирующего потокосцепления содержат постоянные составляющие, соответствующие амплитудам первых гармоник, и переменные составляющие, соответствующие высшим временным и пространственным гармоникам. Рассмотрение механизма возникновения модуляционных составляющих ЭДС пока- зывает, что их появление связано, в первую очередь, с переменной составляющей тока якоря, обусловленной несоответствием формы питающего напряжения форме выпрямленной противо- ЭДС ЭМП БД.
Пусть, например, к обмотке якоря ВД приложено напряжение прямоугольной формы. Для того, чтобы отсутствовали переменная составляющая тока якоря и связанные с ней модуляционные составляющие ЭДС, необходимо, чтобы форма выпрямленной противо- ЭДС ВД была также прямоугольной. При этом пульсации момента ВД также будут отсутствовать ,
Следовательно, для подавления пулсаций тока и момента ВД необходимо формировать выпрямленную противо- ЭДС ВД так, чтобы исключить условия появления переменкой составляющей вектора тока якоря.
Предлагаемый способ компенсации пульсаций тока и момента ВД основан
на искусственном формировании формы противо-ЭДС ЭМП (при синусоидальном распределении магнитной индукции) путем регулирования поля возбуждения так, чтобы исключить появление переменной составляющей вектора тока якоря, и сводится к непрерывному слежению за изменениями проекции вектора результирующего потокосцепления на ось, ортогональную вектору тока якоря, и к поддержанию ее величины неизменной на заданном уровне и равной ее среднему значению дл каждого заданного момента нагрузки путем регулирования поля возбуждения, т.е. вводится обратная связь по переменной составляющей проекции вектора результирующего потокосцепления:
v,Ј- v,Ee ,
(2)
где у . - среднее значение проекции
о С со
основной составляющей вектора результирующего потокосцепления на ось Ј.
Покажем, что условие поддержания постоянства проекции вектора резуль.- тирующего потокосцепления является достаточным для исключения пульсаций тока и момента ВД.
Так, например, при работе коммутатора ВД в режиме инвертора тока переменная составляющая вектора тока якоря отсутствует и пульсации момента ВД обусловлены изменением проекции основной составляющей вектора результирующего потокосцепления Следовательно, поддержание проекции указанного вектора на заданном уровне согласно выражению (1) приводит к исключению пульсаций момента ВД.
В случае работы коммутатора ВД в режиме инвертора напряжения к двум фазам ЭМП приложено постоянное напряжение . При этом поддержание постоянства проекции основной составляющей вектора результирующего потокосцепления у jjig обусловливает постоянство выпрямленной противо-ЭДС ЭМП, что определяет неизменную величину модуля вектора тока якоря, а значит согласно выражению (1) и момента ВД.
Указанные выше условия справедливы как для межкоммутационного, так и коммутационного интервалов работы ВД.
i
Таким образом, для подавления пульсаций вращающего момента ВД достаточным является выполнение условия (2) , для чего необходимо определить величину и фазу основной составляющей вектора результирующего потокосцелле- ния Vji и вычислить требуемую величину переменной составляющей потоко- сцепления возбуждения пропорциональную ей переменную составляющую тока возбужденияДif из условия обеспечения постоянного значения проекции вектора результирующего потоко- сцепления Vrf1, на направление, ортогональное вектору тока якоря, равное . ее среднему, значению для заданного момента нагрузки, при этом
V; 4Vf .О)
Тогда с учетом условия(2)
Ј Ј+ vfЈ У Откуда
(4)
dV
jr
We
(5)
где луге - проекция переменной составляющей вектора потоко- сцепления возбуждения на ось Ј
Аналогичного результата можно дос тичь при поддержании проекции вектора полного потокосцепления неизменной на заданном уровне и равной ее среднему значению для каждого заданного момента нагрузки путем регулирования поля возбуждения:
V . (6)
Ј
SЈ
ср
5Ј0
де v
St
SEtf
ц - проекция вектора пол- 0 ного потокосцепления на ось Ј, среднее значение проекции основной составляющей вектора полного потокосцепления. на ось Ј и ее постоянная составляющая, причем
у7 Ф5 + й У
(7)
Итак, условия (2) и (5) являются основными при подавлении пульсаций момента ВД.
Условие (5) можно выполнить путем регулирования тока возбуждения ЭМП по продольной оси d, по поперечной оси q или по продольной и поперечной осям одновременно.
Рассмотрим выполнение условия (5) при регулировании тока возбуждения по продольной оси. Необходимая пере- менная составляющая потокосцепления возбуждения определяется из векторной диаграммы (фиг. 1), построенной для изображающих векторов токов и потокосцеплений при протекании тока
10 в фазах а, Ь, угол опережения относительно ЭДС холостого хода р„ 30 эл.град., угол опережения относительно напряжения /а 15 эл.град. и угол коммутатции у 0 (принуди15 тельная коммутация). Из векторной диаграммы видно, что для компенсации пульсаций момента ВД необходимо, чтобы конец вектора результирующего потокосцепления по мере вращения ин20 ДУктора двигался по прямой, совпадающей по направлению с вектором тока якоря и отсекающей на оси Ј значение потокосцепления у ц; лс . При этом имеем
fcr /cos -б ,(8).
где VcTЈ ( л)- If/6 -/з)- - 3/ff cos p,
С1 4 - f/6- /30, J4 W переменная составляющая вектора потокосцепления возбуждения по оси d j / i углы опережения включения при нагрузке и холостом ходе;
V - текущий угол поворота. При регулировании тока возбуждения по поперечной оси q необходимый закон изменения потокосцепления возбуждения по оси q определяется (фиг. 2):
25
30
35
40
йц /sin 4
(9)
Регулирование тока возбуждения по продольной и поперечной осям
(фиг. 3) необходимо производить по соотношениям:
4VfJ1 4(ГЈ cos -1 (-10)
dVЈcH
Использование возбуждения ЭМП по двум осям дает возможность наряду с подавлением пульсаций момента дополнительно улучшить энергетические и массогабаритные показатели ВД за счет исключения составляющих потокосцеплений, связанных с реактивной мощностью ЭМП. При этом регулирование потокосцеплений возбуждения необходимо производить по следующим соотношениям (фиг. 3)
елг cos AVJp si11 02)
й VcPЈ Sin г uҐt pcos/i (3) а также
dV
fj, cos1 - sin, (14) 10
f43 sinf Vrflf COS
(15)
HV
где 4 Vjip t(V L sinGV - F/6-/J ) +
+ 3/fr- cos /5 - переменная составляющая проекции ос- новной составляющей вектора результирующего по- токосцепления на направление р вектора тока якоря; ) - /6 -р ) - про екция основной составляющей вектора результирующего потокосцепления на направление вектора тока якоря.
В последних двух способах регулирования потокосцепления возбуждения по двум осям происходит поддержание вектора результирующего потокосцепления в первом случае равным по ам- плитуде и фазе постоянной составляющей вектора результирующего потокосцепления, а во втором случае - ортогональным вектору тока якоря и равным проекции постоянной состав- ляющей вектора результирующего потот косцепления ,1
Итак, регулирование потока возбуждения в двух осях позволяет наиболее полно компенсировать пульсации момента ВД, а также улучшить массо- габаритные и энергетические показатели ВД.
Регулирование потока возбуждения по оси d является наиболее простым и по условиям компенсации пульсаций момента не уступает случаю регулирования потока возбуждения в двух осях однако такое регулирование сопряжено с дополнительным потреблением реактивной мощнос ти. С точки зрения потребления реактивной мощности регулирование потока возбуждения по оси q обладает определенными преимуществам однако регулирование пото- ка возбуждения по поперечной оси не позволяет полностью компенсировать пульсации момента ВД (при регулировании потока по поперечной оси имеется ограничение в регулировании минимума потока возбуждения).
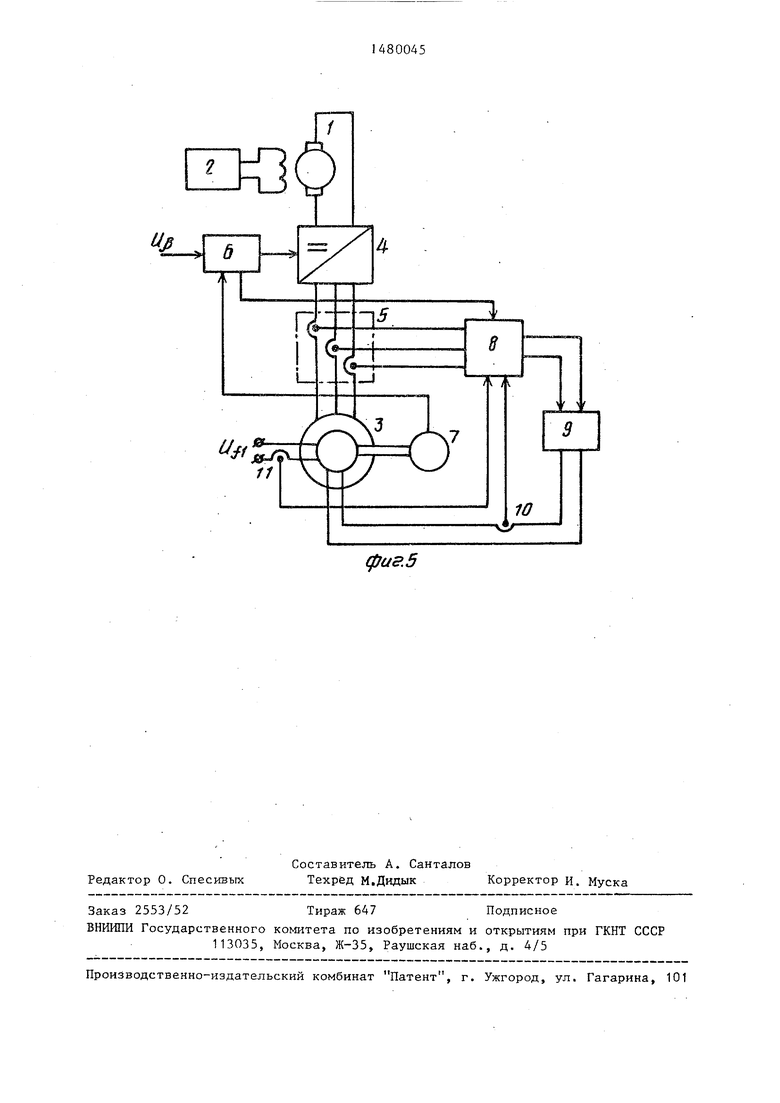
Для пояснения .способа на фиг. 5 приведена схема устройства для его осуществления.
Устройство содержит генератор постоянного тока с регулятором 2 возбуждения, электромеханический преобразователь (ЭМП) 3, обмотка якоря которого связана с выходом инвертора 4 через трансформатор 5 тока, систему 6 управления (СУ) , датчик 7 углового положения ротора (ДПР) ЭМП 3 с дополнительной продольной обмоткой возбуждения, вычислительное устройство 8, усилитель 9 тока возбуждения, датчики 10, 11 тока регулируемого и нерегулируемого возбуждения по продольной оси ЭМП 3.
Регулирование частоты вращения ЭМП 3 производится изменением амплитуды напряжения генератора I с помощью регулятора 2 возбуждения генератора 1 . Напряжение генератора 1 подается на обмотку якоря ЭМП 3 через инвертор 4, управляемый от датчика 7 углового положения ротора (ДПР), выполненного в виде синусно-косинусного вращающегося трансформатора. В зависимости от величины сигнала управления Up угла опережения включения сигналы ДПР 7 сдвигаются по фазе и подаются на вычислительное устройство 8, а также используются для формирования импульсов управления инвертором 4. По сигналам ДПР 7 (sin s, cosC фазным токам ЭМП 3, а также токам регулируемого и нерегулируемого возбуждения ЭМП 3 с помощью вычислительного устройства 8 известными способами определяются проекция основной составляющей вектора результирующего потокосцепления, ее переменная и постоянная составляющие и выделяется сигнал управления возбуждением, равный йц „, , который поступает на дополнительную продольную обмотку возбуждения через усилитель 9 возбуждения.
На фиг. 4 а-г приведена временная диаграмма токов и ЭДС ВД без регулирования поля возбуждения, на фиг,4 д- ж - при регулировании возбуждения по схеме фиг. 5.
Продольный и поперечный токи ij , i r при мгновенной коммутации изменяются по известныг-; соотношениям:
2/ i1
2/ -/3- Idcos
(16) (17)
где I - эквивалентный выпрямленный ток БД, 0 лК .
Из диаграммы (фиг. 4) видно, что ЭДС ЭМП БД в межкоммутационный период изменяется по линейному закону, скачкообразно меняясь во время коммутации. При этом форма фазного тока - прямоугольная без пульсаций с длительностью 2/Г/З эл.град.
Следует заметить, что такая же форма ЭДС и токов получается при регулировании тока возбуходения по поперечной оси и в двух осях, когда компенсируется лишь активная часть переменной составляющей проекции основной составляющей вектора результирующего потокосцепления л Vj cПри регулировании потока возбуждения в двух осях и компенсации составляющих потокосцеплений, связанных с реактивной мощностью, формы ЭДС и токов ЭМП ВД - прямоугольные длительности 2/7/3 эл.град.
Способы компенсаций пульсаций момента ВД могут быть применены для ВД с различным способом возбуждения (независимое, магнитоэлектрическое и т.д.), при которых необходимо иметь дополнительные обмотки по продольной и/или по поперечной осям. При этом ЗКц БД целесообразно выполнять без демпферных обмоток. Коммутатор ВД может быть выполнен как с естественной, так и с искусственной коммутацией силовых ключей.
Преимущество способа по сравнению с известными заключается в возможности создания ВД с уменьшенными пульсациями электромагнитного момента, т.е. улучшенными виброакустическими показателями и диапазоном регулирования частоты вращения.
Кроме того, улучшаются также энергетические характеристики ВД, уменьшается масса установленного оборудования за счет исключения дросселя.
Формула изобретения
1. Способ компенсации пульсаций вращающего момента вентильного электродвигателя путем регулирования тока возбуждения в функции тока якоря, отл.ич ающийс я тем, что, с целью уменьшения пульсаций мо
5
0
5
0
5
0
5
0
5
мента и расширения области применения, определяют величину и фазу основной составляющей вектора результирующего потокосцепления и вычисляют требуемую величину переменной составляющей потокосцепления возбуждения и пропорциональную ей переменную составляющую тока возбуждения из условия обеспечения постоянного значения проекции вектора результирующего потокосцейлення на направление, ортогональное вектору тока якоря, равного ее среднему значению для заданного момента нагрузки.
2. Способ по п. 1 , о т л и ч а - ю щ и и с я тем, что регулируют ток возбуждения по продольной оси.
3 . Способ по п. 1 , о т л и ч а го- од и и с я тем, что регулируют ток возбуждения по поперечной оси.
4.Способ по п. 1, отличающийся тем, что регулируют ток возбуждения по продольной и поперечной осям,
5.Способ по п. 4, о т л и ч а го- од и и с я тем, что ток возбуждения по продольной оси регулируют в функции проекции активной части переменной составляющей вектора результирующего потокосцепления на продольную ось, а по поперечной оси - в функции проекции активной части того же вектора на поперечную ось.
6.Способ поп. 4, отлича го- од и и с я тем, что, с целью улучшения энергетических и массогабариткых показателей, ток возбуждения по продольной оси регулируют в функции проекции переменной составляющей вектора результирующего потокосцепления на продольную ось, а по поперечной оси - в функции проекции того же вектора на поперечную ось.
7.Способ по п. 4, отлича го- од и и с я тем, что, с целью улучшения энергетических и массогабаритных показателей, ток возбуждения по продольной оси регулируют в функции суммы проекций активной части переменной составляющей и реактивной части основной составляющей вектора результирующего потокосцепления на продольную ось, а по поперечной оси в функции суммы проекций активной части переменной составляющей и реактивной части основной составляющей того же вектора на поперечную ось. . I
м
ч 5 X
i4;
r
Ј
ло
nJ V/
| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электродвигатель | 1987 |
|
SU1480046A1 |
| Автономная система электрооборудования с вентильным электродвигателем | 1987 |
|
SU1534662A1 |
| Автономная система электрооборудования с вентильным электродвигателем | 1987 |
|
SU1457140A1 |
| Автономная система электрооборудования | 1987 |
|
SU1621124A1 |
| Автономная система электрооборудования с вентильным электродвигателем | 1985 |
|
SU1356134A1 |
| Однофазный вентильный электродвигатель | 1976 |
|
SU657536A1 |
| Устройство для защиты синхронной машины от асинхронного хода | 1980 |
|
SU930483A1 |
| ЭЛЕКТРОПРИВОД С СИНХРОННЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2092967C1 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 2012 |
|
RU2482596C1 |
| Электропривод переменного тока | 1983 |
|
SU1169128A1 |

Изобретение относится к электротехнике, а именно к электрическим машинам различного назначения при работе их от преобразователей частоты. Целью изобретения является уменьшение пульсаций момента вентильного двигателя (ВД), расширение области применения, а также улучшение энергетических и массогабаритных показателей ВД. Способ осуществляется следующим образом. Определяют величину и фазу основной составляющей вектора результирующего потокосцепления и вычисляют требуемую величину переменной составляющей потокосцепления возбуждения и пропорциональную ей переменную составляющую тока возбуждения из условий обеспечения постоянства значения проекции вектора результирующего потокосцепления на направление, ортогональное вектору тока якоря, равного среднему значению для заданного момента нагрузки. Приводятся варианты способа, отличающиеся характером регулирования тока возбуждения. 6 з.п. ф-лы, 5 ил.
u#
фиг. 5
| Вентильные двигатели и их применение на электроподвижном составе | |||
| Под ред | |||
| Б.Н | |||
| Тихменева | |||
| М.: Транспорт, I976, с | |||
| Способ использования делительного аппарата ровничных (чесальных) машин, предназначенных для мериносовой шерсти, с целью переработки на них грубых шерстей | 1921 |
|
SU18A1 |
| Conf | |||
| Pec | |||
| Pap | |||
| IEEE las Int Ce- micond | |||
| Power Confert | |||
| Conf | |||
| Lake Buena Vista, Fla, 1977, New York, 1977, c | |||
| Прибор для подогрева воздуха отработавшими газам и двигателя | 1921 |
|
SU320A1 |
