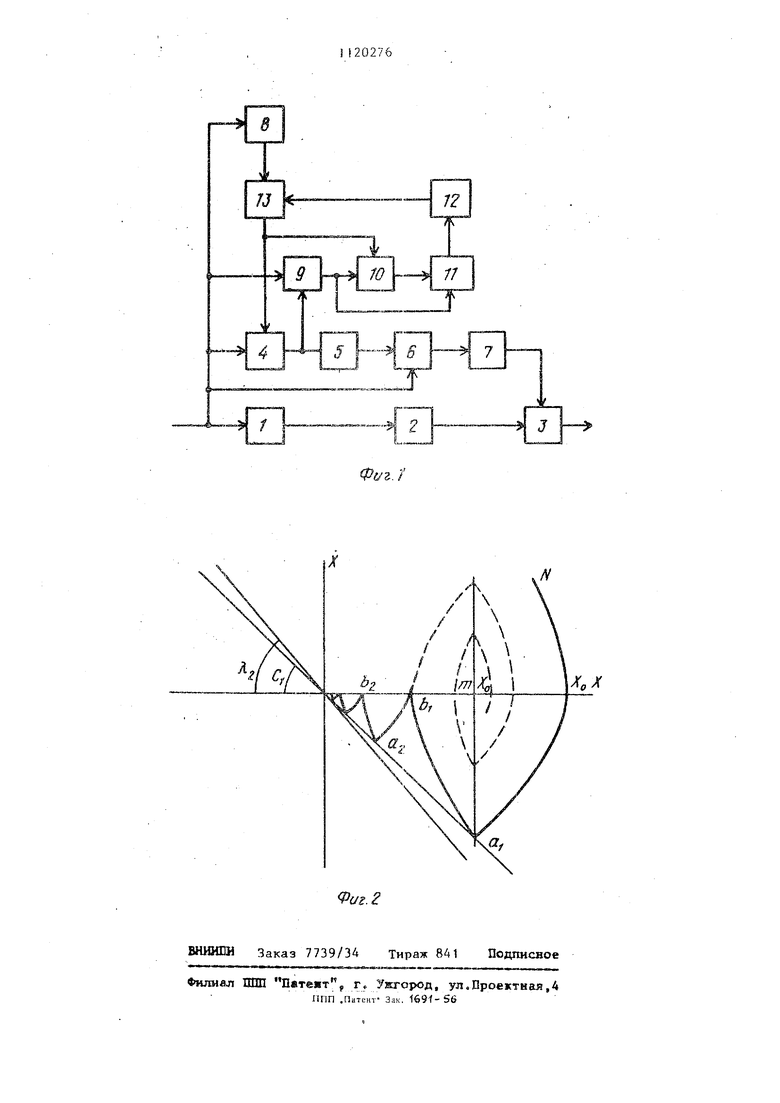
Итобретелгие относится к aBTOMa- -vi четкому регулироканиш и предназначено л,яя, улучшения яннамических харак теристик систем автоматического регулирона НИИ. Известно нелинейное .корректирующее устройство, состоящее из,двух линейных фильтров, двух блоков опре деления модуля, суг-{матора, блока умножения и блока сигнатуры lj . Недостатком этого устройства является отсутствие возможности регулировки 8 широких пределах вносимого фазового опережения. Известно также корректирующее устройство с релейной характеристико состоящее из запоминающего элемента, линейного безынерционного блока, эл.е мента сравнения, релейного элемента блока умножения, блока определения модуля, фильтра и нуль-органа J Недостаток данного устройства заключается в зависимости вносимого им фазового опереженияJ от частоты входного сигнала при испольэ.овакки в качестве:: фильтра физически реализуемого дифференцирующего устройства Наиболее близким по технической суп1ности к предлагаемому является нелинейное корректирующее устройст во, состояп;ее из усилителя, блока определения модуля, блока умножения пикогзого детектора, масшта 5иру1ОП1его блока, сумматора, сигнум-реле и нуль-органа. Входной сигнал поступает на входы усилителя, пикового детектора и нуль-органа, в ьк од ной сигнал у СШЕЙтеля, усиленньй в К раз, преобразуется блоком определения модуля и of иополярньгй и подается на первый вход блока умножения. Пиковый детек тор запоминает экстремальное значение изменяющегося входного сигнала устройства и хранит его до поступле ния сигнала на сброс из нуль-органа Масштабирующий блок в m раз ( изменяет , величину выходного си нала пикового детектора. Сумматор сравнивает текущее значение входного сигнала устройства и значение сигнала с вькода масштабирующего блока. Сигнум-реле, реализу Dtee знаковую функцию выходного сигнала «y fмaтopa, подключено к второму входу. бАока умножения, В блоке у ножения происходит присвоение знака выходному сигналу блокД определения моауля. Прк работе такого корректирующего устройства и системе автоматического управления наблюдается улучшение динамических характеристик систе -1ы (уме |} шение пес.ррегулированик и длительности переходного процесса) с yBejm4eHHeM KoittxtJMtwetrra передачи масштабирукнцего блока от нуля до некоторого критического зна- . чения 3j . Недостаток изиестного устройства заключается в появлении статической ошибки в системе автоматического управления при выборе коэффициента передачи масштабирующего блока выше некоторого критического значения . Цель изобретения - повьшение точности работы корректирую цего устройства . Поставленная цель достигается темд что в нелинейное корректирующее устройство5 содержащее последовательно соединенные усилитель, блок определения модуля, блок умножения и последовательно соединенные первый пиковый детектор, масштабирующей блок, первый сумгШТор и сигнум-реле, выход которого подключен к второму входу блока умножения, причем второй вход первого сумматора соединен с входами усилителя, нульоргана, первым уходом первого пикового детектора и РЗХОДОМ устройства, BBezj,eHb после овательно соединенные второй сумматор, второй пиковый детектор, компаратор, формирователь импульсов и элемент ИЛИ., причем первьй вход второго сум 1атора подключен к входу устройства, а второй вход к выходу первого пиковог о детектора, второй вход второго компаратора подключен к вькоду второго сумматора, второй вход злемекта ИЛИ поЬ,ключен к выходу нуль-органа, а выход элемента ИШ - к вторым входам первого и второго пиковых детекторов, выход блока умножения является выходом устройства. На фиг. 1 изображена блок-схема предлагаемого корректирующего устройства J на фиг. 2 - диаграмма, поягняющая его работу. Нелинейное корректирующее устройство содержит усилитель 1, блок 2 определения модуля блок 3 умножения, первый пиковый детектор А, масштабиpyuxuKf блок 5t первьпЧ сумматор 6, снгиум-реле 7, нуль-орган 8, второй
сумматор 9, второй пиковый детектор 111, компаратор 11, формирователь1/. импульсов, элемент ИЛИ 13. Выход блока умножения является вькодом устройства.
Второй сумматор 9 сравнивает си1- налы на вькоде первого пикового детектора 4 и входе устройства. Выходной сигнал второго сумматора 9 подается на информационный вход второго пикового детектора 10. Входной и выходной сигналы второго ликов.ого детектора 10 сравниваются компаратором 11. При равенстве этих сигналов выходной сигнал компаратора 11 имеет нулевое значение. При убывании по модулю входного сигнала второго пикового детектора 10 на выходе компаратора 11 образуется перепад напряжения. По фронту перепада формирователем 12 формируется импульс сброса, поступающий через элемент 1-ШИ 13 на вторые входы обоих пиковых детекторов.
Рассмотрим работу корректирующего устройства на фазовой плоскости (фиг. 2) на примере системы второго порядка с передаточной функцией
(1)
О
30
Так как корректирующее устройство изменяет только знак обратной связи, характеристические уравнения для положительной (ПОС) и отрицательной (ООС) обратных связей в системе запишутся в виде
Г,О.) - (ПОС), (2)
D,() А + J 1 + (ООС), (3)
Для первого случая характерно наличие двух фазовых траекторий в виде прямых, пр оходяпз гх через начало координат с угловыми коэффициентами, равными корням характеристического уравнения (2) О, -jV J О,
Во втором случае при 1 фазовые траектории имеют вид скручивающихся спиралей.
Б исходном состоянии в системе включена отрицательная обратная связь Первый усилитель 1 усиливает входной сигнал корректирующего устройства. Блок 2 определения модуля преобразует выходной сигнал усилителя 1 к од
нополярмому . в блоке 3 происходи г присвоение знака выходнс му сигналу блока 2 определения модуля. Начальные условия заданы на фазовой плоскоти точкой N . Движение проходит по фазовой траектории QC, - Пиковый дететор А запоминает экстр малы1ое значение входного сигнала X корректирующего устройства Xjj. В первом сумматоре 6 осуществляется сравнение текущего значения входного сигнала устройства с его запомненным экстремальным значением, преобразованным масштабирующим блоком 5. Если коэффициент передачи масштабирующего блока 5 больше критического, точка л достижения равенства X ГПХ принадлежит прямой с угловым коэффициентом /С,/ :. . В точке а происходит включение ПОС и движение происходит по участку гиперболы до точки Ь| . Все это время выходной сигнал второго 9 сумматора возрастает по модулю и входные сигналы компаратора 11 равны. В точке Ь вькодной сигнал stoporo сумматора 9 достигает экстремума и начинает убывать по модулю. В этот момент на выходе компаратора 11 появляется перепад напряжений из которого формирователь 12 формирует импульс сброса пиковых детекторов А
и 10. .После сброса пиковые детекторы А и 10 запоминают текущие значения входного сигнала устройства и выходного сигнала второго 9 сумматора соответственно. В системе включается ООС и движение из точки Ь в точку aj происходит по участку спиралевидной фазовой траектории. В точке а, вновь включается ПОС и процесс повторяется до тех пор, пока входной сигнал корректирующего устройства не станет равным нулю.
Нуль-орган 8 осуществляет сброс в нуль пикового детектора при достижении входным сигналом устройства нулевого значения.
Использование новых элементов второго сумматора, второго пикового детектора, компаратора, формирователя импульсов и элемента ИЛИ выгодно отличает предлагаемое корректирующее устройство от известного, так как увеличивается точность работы устройства, устраняется возможность появления статической ошибки в системе и обеспечивается переходный процесс без перерегулирования.
12
| название | год | авторы | номер документа |
|---|---|---|---|
| Нелинейное корректирующее устройство | 1983 |
|
SU1126925A1 |
| Нелинейное корректирующееуСТРОйСТВО | 1979 |
|
SU840790A1 |
| Корректирующее устройство | 1985 |
|
SU1278805A1 |
| Нелинейное корректирующее устройство | 1984 |
|
SU1226403A2 |
| Нелинейное корректирующее устройство | 1990 |
|
SU1755255A1 |
| Нелинейное корректирующее устройство | 1989 |
|
SU1734070A1 |
| НЕЛИНЕЙНОЕ КОРРЕКТИРУЮЩЕЕ УСТРОЙСТВО | 1991 |
|
RU2022312C1 |
| Нелинейное корректирующее устройство | 1988 |
|
SU1576881A2 |
| Нелинейное корректирующее устройство | 1987 |
|
SU1536351A1 |
| Нелинейное корректирующее устройство | 1987 |
|
SU1425594A2 |
НЕЛИНЕЙНОЕ КОРРЕКТИРУЮО(ЕЕ УСТРОЙСТВО, содержащее последовательно соединенные усилитель, блок определения модуля, блок умножения и последовательно соединенные первый пиковый детектор, мае штаб ируияций блок, первый сумматор и сигнум-реле. вькод которого подключен к второму входу блока умножения, причем второй вход первого сумматора соединен с входами усилителя, нуль-органа, первым входом первого пикового детектора и входом устройства, о т л и ч аг ю щ е е с я тем, что, с целью повышения точности устройства, в него введены последовательно соединенные второй сумматор, второй пиковый детектор, компаратор, формирователь импульсов и элемент ИЛИ, причем первый вход второго сумматора подключен к входу устройства, а второй вход к выходу первого пикового детектора, § второй вход второго компаратора подключен к выходу второго сумматора, (Л второй вход элемента ИЛИ подключен к выходу нуль-органа, а выход элемента ИЛИ - к вторым входам первого и второго пиковых детекторов, выход блока умножения является выходом устройства.
|,™.„-«-«.«™,™,-™. 2 J
Фиг I
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР № 411430, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
