Изобретение относится к комплексному контролю исправности основного комплекта датчиков системы автоматического управления (САУ) самолета, а именно: датчика скорости, датчика угла атаки, датчиков угловых скоростей и датчиков перегрузок по осям связанной системы координат. Оно может быть использовано для контроля датчиков бесплатформенных инерциальных навигационных систем и в САУ самолетов для повышения безопасности пилотирования, простоты обслуживания и уменьшения веса и стоимости бортового оборудования. Наибольшее значение оно имеет для контроля комплекта датчиков легких, маневренных самолетов, не содержащих избыточного приборного оборудования.
Известно устройство для контроля датчиков системы автоматического управления самолета, содержащее, в частности, три одинаково ориентированных однотипных датчика угловых скоростей, подключенных к кворум-элементу. Устройство построено по мажоритарному принципу с кворум-элементом, содержащим первую, вторую и третью схему вычитания, первые, вторые и третьи нелинейные звенья, сумматор на три входа, усилитель, первый, второй и третий компараторы, источник стабилизированного сигнала. Суммирующие входы первой, второй и третьей схем вычитания соединены с соответствующими выходами первого, второго и третьего контролируемых датчиков угловых скоростей, вычитающие входы - с выходом усилителя, а выходы - с соответствующими входами первого, второго и третьего нелинейных звеньев и одним из входов соответственно первого, второго и третьего компараторов, другой вход которых соединен с источником стабилизированного сигнала. Входы сумматора соединены с выходами первого, второго и третьего нелинейных звеньев, а выход - с входом усилителя. Устройство предназначено для контроля только трех однотипных датчиков угловых скоростей (или трех датчиков перегрузок, или трех датчиков углов атаки, ...) и выдачи сигнализации об отказе одного из них при отличии его показаний от двух других. Сигналы трех контролируемых датчиков угловых скоростей поступают на суммирующие входы соответственно первой, второй и третьей схем вычитания, на другие вычитающие входы которых поступает усредненный сигнал всех трех датчиков с выхода усилителя. Последний получается после прохождения разностных выходных сигналов первой, второй и третьей схем вычитания через соответственно первое, второе и третье нелинейное звено и их суммирования в сумматоре. Выходной сигнал последнего поступает на вход усилителя. Разностные выходные сигналы первой, второй и третьей схем вычитания поступают соответственно на один из входов первого, второго и третьего компараторов, на другой вход которых поступает стабилизированный сигнал, пропорциональный допустимой разности между усредненным сигналом всех датчиков и выходным сигналом каждого из трех исправных датчиков. При отказе одного из датчиков его выходной сигнал отличается от усредненного сигнала с выхода усилителя на величину больше допустимой разности - порога срабатывания соответствующего компаратора, что приводит к сигнализации отказа компаратором.
Устройство проверяет не менее трех однотипных датчиков, что требует установки на борт самолета избыточного тройного комплекта приборов, что приводит к повышению веса и стоимости оборудования. Кроме того, оно обладает низкой достоверностью обнаружения отказа.
Техническая задача, решаемая изобретением, состоит в создании простейшего устройства контроля основных датчиков САУ самолета, с наибольшей достоверностью определяющего их отказ, без установки на борт избыточных комплектов этих датчиков при минимальном весе, стоимости и габаритах устройства контроля и приборного оборудования в целом.
Решение технической задачи достигается тем, что в устройство для контроля датчиков системы автоматического управления, содержащее первый сумматор и компаратор, один из входов которого соединен с источником стабилизированного сигнала, введены второй, третий и четвертый сумматоры, первый, второй, третий, четвертый и пятый умножители, первый и второй дифференциаторы, первый, второй, третий квадраторы, тангенсный функциональный преобразователь и блок извлечения квадратного корня, причем первый суммирующий вход второго сумматора соединен с выходом контролируемого датчика поперечной перегрузки, второй суммирующий вход - с выходом первого умножителя, входы которого соединены с выходами контролируемых датчика угловой скорости рыскания и датчика скорости, третий суммирующий вход - с выходом второго умножителя, входы которого соединены с выходом контролируемого датчика угловой скорости крена и выходом третьего умножителя, причем контролируемый датчик скорости соединен с одним входом третьего умножителя, а контролируемый датчик угла атаки через тангенсный функциональный преобразователь - с другим входом третьего умножителя, первый суммирующий вход третьего сумматора соединен с выходом контролируемого датчика нормальной перегрузки, второй суммирующий вход через первый дифференциатор соединен с выходом третьего умножителя, а третий вычитающий вход - с выходом четвертого умножителя, входы которого соединены с выходами контролируемых датчика угловой скорости тангажа и датчика скорости, первый суммирующий вход четвертого сумматора соединен с выходом контролируемого датчика продольной перегрузки, второй вычитающий вход через второй дифференциатор соединен с выходом контролируемого датчика скорости, а третий вычитающий вход - с выходом пятого умножителя, входы которого соединены с выходом третьего умножителя и выходом контролируемого датчика угловой скорости тангажа, выходы второго, третьего и четвертого сумматора соответственно через первый, второй и третий квадраторы соединены с первым, вторым и третьим суммирующими входами первого сумматора, выход которого через блок извлечения квадратного корня соединен с вторым входом компаратора, выход которого служит выходом устройства.
Сущность изобретения заключается в сравнении разности векторов измеренной и вычисленной по показаниям контролируемых датчиков перегрузки, действующей на самолет, с ее заранее известным значением, равным единице при исправности датчика скорости, датчика угла атаки, датчиков угловых скоростей и датчиков перегрузок. При отличии этой разности векторов, вычисляемой в устройстве, от единицы происходит срабатывание компаратора, сигнализирующее об отказе одного из датчиков.
На фиг. 1 приведена структурная схема устройства для контроля датчиков системы автоматического управления, где приняты следующие обозначения: 1 - датчик скорости самолета; 2 - датчик угла атаки самолета; 3-1, 3-2, 3-3 - датчики продольной, нормальной и поперечной перегрузки самолета; 4-1, 4-2, 4-3 - датчики угловых скоростей крена, рыскания и тангажа самолета; 5-1, 5-2, 5-3, 5-4 - первый, второй, третий и четвертый сумматоры; 6-1, 6-2, 6-3, 6-4, 6-5 - первый, второй, третий, четвертый и пятый умножители; 7-1, 7-2 - первый и второй дифференциаторы; 8-1, 8-2, 8-3 - первый, второй и третий квадраторы; 9 - блок извлечения квадратного корня; 10 - компаратор; 11 - источник стабилизированного сигнала; 12 - тангенсный функциональный преобразователь.
На фиг. 2 изображено угловое положение самолета и взаимное положение земной Oξηϕ и связанной OX1Y1Z1 систем координат через углы тангажа ν и крена γ . Там же показаны проекции X, Y, Z вектора суммарной силы  , действующей на самолет, без учета вектора силы
, действующей на самолет, без учета вектора силы  тяжести, проекции ωx, ωy, ωz вектора угловой скорости, проекции Vx, Vy, Vz вектора скорости
тяжести, проекции ωx, ωy, ωz вектора угловой скорости, проекции Vx, Vy, Vz вектора скорости  угла атаки α самолета и расположение датчика 1 скорости, датчика 2 угла атаки, датчиков 3-1, 3-2, 3-3 продольной, нормальной и поперечной перегрузок, датчиков 4-1, 4-2, 4-3 угловых скоростей крена, рыскания и тангажа.
угла атаки α самолета и расположение датчика 1 скорости, датчика 2 угла атаки, датчиков 3-1, 3-2, 3-3 продольной, нормальной и поперечной перегрузок, датчиков 4-1, 4-2, 4-3 угловых скоростей крена, рыскания и тангажа.
Дифференциальное уравнение движения самолета в векторной форме можно записать в виде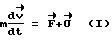 ,
,
где m - масса самолета,  - вектор скорости, проекции которого на оси, связанной системы координат - Vx, Vy, Vz. Переходя к скалярной форме записи уравнений (1), в проекциях на оси X1Y1Z1 связанной системы координат получаем:
- вектор скорости, проекции которого на оси, связанной системы координат - Vx, Vy, Vz. Переходя к скалярной форме записи уравнений (1), в проекциях на оси X1Y1Z1 связанной системы координат получаем: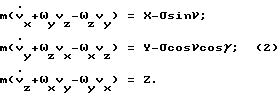
Разделив правую и левую часть уравнений (2) на σ = mg, учитывая априорно малое значение скорости Vz и ускорения  , получаем
, получаем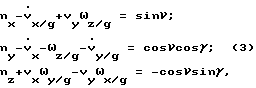
где nx, ny, nz - продольная, нормальная и боковая перегрузка; g - ускорение силы тяжести. В правой части уравнений (3) присутствуют составляющие, выражаемые через углы тангажа ν и крена γ самолета, измеряемые обычно бортовым построителем вертикали гироскопического типа (авиагоризонт, гировертикаль, курсовертикаль, ...), который не входит в штатный состав комплекта датчиков САУ. Поэтому для получения контролируемых соотношений, не зависимых от показаний построителя вертикали, имеющегося или нет на борту самолета, и включающих сигналы только датчиков САУ, преобразуем уравнения (3). Возведем в квадрат правые и левые части (3) и просуммируем их с последующим извлечением корня квадратного из полученной суммы: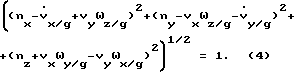
Поскольку обычно приемник воздушного давления датчика скорости ориентирован по оси X1 связанной системы координат, то указанный датчик непосредственно измеряет проекцию скорости Vx. Другая составляющая Vy в этом случае получается с учетом взаимосвязи (фиг. 2) проекций Vx, Vy и значения полной скорости полета при малом угле β скольжения:
vx = vcosα; vy = -sinα. (5)
Учитывая известные измеряемые значения Vx и α , получаем выражение для проекции:
vy = -vxtgα. (6)
Реализация устройства контроля предполагает использование соотношений (4), (6).
Устройство для контроля датчиков системы автоматического управления содержит сумматор 5-2, первый суммирующий вход которого соединен с выходом контролируемого датчика 3-3 поперечной перегрузки. Второй суммирующий вход сумматора 5-2 соединен с выходом умножителя 6-1, входы которого соединены с выходами контролируемых датчика 4-2 угловой скорости рыскания и датчика 1 скорости. Третий суммирующий вход сумматора 5-2 соединен с выходом умножителя 6-2, входы которого соединены с выходом контролируемого датчика 4-1 угловой скорости крена и выходом умножителя 6-3. Входы умножителя 6-3 соединены с выходом контролируемого датчика 1 скорости и через тангенсный функциональный преобразователь 12 с выходом датчика 2 угла атаки. Первый суммирующий вход сумматора 5-3 соединен с выходом контролируемого датчика 3-2 нормальной перегрузки. Второй суммирующий вход сумматора 5-3 через дифференциатор 7-1 соединен с выходом умножителя 6-3. Третий вычитающий вход сумматора 5-3 соединен с выходом умножителя 6-4, входы которого соединены с выходом контролируемого датчика 4-3 угловой скорости тангажа и выходом контролируемого датчика 1 скорости. Первый суммирующий вход сумматора 5-4 соединен с выходом контролируемого датчика 3-1 продольной перегрузки. Второй вычитающий вход сумматора 5-4 через дифференциатор 7-2 соединен с выходом контролируемого датчика 1 скорости. Третий вычитающий вход сумматора 5-4 соединен с выходом умножителя 6-5, входы которого соединены с выходом умножителя 6-3 и выходом контролируемого датчика 4-3 угловой скорости тангажа. Вход квадратора 8-1 соединен с выходом сумматора 5-2, а выход - с первым суммирующим входом сумматора 5-1. Вход квадратора 8-2 соединен с выходом сумматора 5-3, а выход - с вторым суммирующим входом сумматора 5-1. Вход квадратора 8-3 соединен с выходом сумматора 5-4, а выход - с третьим суммирующим входом сумматора 5-1. Один вход компаратора 10 соединен с выходом источника 11 стабилизированного сигнала, а другой - с выходом блока 9 извлечения квадратного корня, вход которого соединен с выходом сумматора 5-1. Выход компаратора 10 служит выходом устройства.
Устройство для контроля датчиков системы автоматического управления самолета работает следующим образом.
Сигнал, пропорциональный скорости Vx, с контролируемого датчика 1 скорости поступает на один вход умножителя 6-3. Сигнал с контролируемого датчика 2 угла атаки предварительно поступает на тангенсный функциональный преобразователь 12, где формируется функция tgα . Выходной сигнал, пропорциональный tgα , поступает на другой вход умножителя 6-3. Тем самым формируется сигнал, пропорциональный проекции скорости Vy по вышеуказанному выражению (6). Сигнал Vy с выхода умножителя 6-3 поступает на один из входов умножителей 6-2, 6-5, а также на вход дифференциатора 7-1. После дифференцирования в дифференциаторе 7-1 сигнал  поступает на второй суммирующий вход сумматора 5-3, на первый суммирующий вход которого поступает сигнал, пропорциональный нормальной перегрузке ny, с контролируемого датчика 3-2 нормальной перегрузки самолета, а на третий вычитающий вход - сигнал с выхода умножителя 6-4. Последний получается после перемножения в умножителе 6-4 сигналов, пропорциональных скорости Vx и угловой скорости ωz тангажа, поступающих на входы умножителя 6-4 с контролируемых датчика 1 скорости самолета и датчика 4-3 угловой скорости тангажа. Одновременно выходной сигнал контролируемого датчика 3-1 продольной перегрузки самолета поступает на первый суммирующий вход сумматора 5-4, на второй вычитающий вход которого поступает продифференцированный в дифференциаторе 7-2 выходной сигнал
поступает на второй суммирующий вход сумматора 5-3, на первый суммирующий вход которого поступает сигнал, пропорциональный нормальной перегрузке ny, с контролируемого датчика 3-2 нормальной перегрузки самолета, а на третий вычитающий вход - сигнал с выхода умножителя 6-4. Последний получается после перемножения в умножителе 6-4 сигналов, пропорциональных скорости Vx и угловой скорости ωz тангажа, поступающих на входы умножителя 6-4 с контролируемых датчика 1 скорости самолета и датчика 4-3 угловой скорости тангажа. Одновременно выходной сигнал контролируемого датчика 3-1 продольной перегрузки самолета поступает на первый суммирующий вход сумматора 5-4, на второй вычитающий вход которого поступает продифференцированный в дифференциаторе 7-2 выходной сигнал  с выхода контролируемого датчика 1 скорости, а на третий вычитающий вход - сигнал с выхода умножителя 6-5. Последний получается после перемножения в умножителе 6-5 сигналов, пропорциональных скорости Vy и угловой скорости ωz тангажа, поступающих на входы умножителя 6-5 с умножителя 6-3 и контролируемого датчика 4-3 угловой скорости тангажа самолета. Одновременно выходной сигнал контролируемого датчика 3-3 поперечной перегрузки самолета поступает на первый суммирующий вход сумматора 5-2, на второй суммирующий вход которого поступает выходной сигнал умножителя 6-1, а на третий суммирующий вход - сигнал с выхода умножителя 6-2. Выходной сигнал умножителя 6-1 получается после перемножения сигналов, пропорциональных скорости Vx и угловой скорости ωy рыскания, поступающих на входы умножителя 6-1 с контролируемых датчика 1 скорости самолета и датчика 4-2 угловой скорости рыскания. Выходной сигнал умножителя 6-2 получается после перемножения сигналов, пропорциональных скорости Vy и угловой скорости ωx крена, поступающих на входы умножителя 6-2 с умножителя 6-3 и контролируемого датчика 4-1 угловой скорости крена. Суммирование вышеуказанных сигналов, поступающих на входы сумматоров 5-2, 5-3, 5-4, осуществляется с различными весовыми коэффициентами. Если сигналы датчиков 3-1, 3-2, 3-3, поступающие на первые входы сумматоров 5-2, 5-3, 5-4, суммируются с весовыми коэффициентами, равными единице, то сигналы, поступающие на второй и третий входы сумматоров 5-2, 5-3, 5-4, суммируются с весовыми коэффициентами 1/g, т.е. с коэффициентами, обратными ускорению g силы тяжести. Сигнал с выхода сумматора 5-2, пропорциональный разности измеренной и вычисленной проекции поперечной перегрузки, поступает на вход квадратора 8-1, где он возводится в квадрат, и с выхода последнего поступает на первый вход сумматора 5-1. Сигнал с выхода сумматора 5-3, пропорциональный разности измеренной и вычисленной нормальной перегрузки, поступает на вход квадратора 8-2, где он возводится в квадрат, и с выхода последнего поступает на второй вход сумматора 5-1. Сигнал с выхода сумматора 5-4, пропорциональный разности измеренной и вычисленной продольной перегрузки, поступает на вход квадратора 8-3, где он возводится в квадрат, и с выхода последнего поступает на третий вход сумматора 5-1. После суммирования выходных сигналов квадраторов 8-1, 8-2, 8-3 в сумматоре 5-1 сигнал поступает на вход блока 9 извлечения квадратного корня, на выходе которого и формируется сигнал, пропорциональный разности векторов измеренной и вычисленной перегрузок. Для исправных датчиков системы автоматического управления эта разность равняется единице, что и проверяется в компараторе 10, на первый вход которого поступает выходной сигнал блока 9 извлечения квадратного корня, а на второй вход - постоянный сигнал, пропорциональный единичной перегрузке, с источника 11 стабилизированного сигнала. При отказе одного или нескольких датчиков реализуемые в устройстве соотношения (4), (6) сигналов нарушаются, т.е. разность между векторами измеренной и вычисленной перегрузок становится отличной от единицы, что приводит к срабатыванию компаратора 10 и выдаче на его выход сигнала об отказе контролируемых датчиков.
с выхода контролируемого датчика 1 скорости, а на третий вычитающий вход - сигнал с выхода умножителя 6-5. Последний получается после перемножения в умножителе 6-5 сигналов, пропорциональных скорости Vy и угловой скорости ωz тангажа, поступающих на входы умножителя 6-5 с умножителя 6-3 и контролируемого датчика 4-3 угловой скорости тангажа самолета. Одновременно выходной сигнал контролируемого датчика 3-3 поперечной перегрузки самолета поступает на первый суммирующий вход сумматора 5-2, на второй суммирующий вход которого поступает выходной сигнал умножителя 6-1, а на третий суммирующий вход - сигнал с выхода умножителя 6-2. Выходной сигнал умножителя 6-1 получается после перемножения сигналов, пропорциональных скорости Vx и угловой скорости ωy рыскания, поступающих на входы умножителя 6-1 с контролируемых датчика 1 скорости самолета и датчика 4-2 угловой скорости рыскания. Выходной сигнал умножителя 6-2 получается после перемножения сигналов, пропорциональных скорости Vy и угловой скорости ωx крена, поступающих на входы умножителя 6-2 с умножителя 6-3 и контролируемого датчика 4-1 угловой скорости крена. Суммирование вышеуказанных сигналов, поступающих на входы сумматоров 5-2, 5-3, 5-4, осуществляется с различными весовыми коэффициентами. Если сигналы датчиков 3-1, 3-2, 3-3, поступающие на первые входы сумматоров 5-2, 5-3, 5-4, суммируются с весовыми коэффициентами, равными единице, то сигналы, поступающие на второй и третий входы сумматоров 5-2, 5-3, 5-4, суммируются с весовыми коэффициентами 1/g, т.е. с коэффициентами, обратными ускорению g силы тяжести. Сигнал с выхода сумматора 5-2, пропорциональный разности измеренной и вычисленной проекции поперечной перегрузки, поступает на вход квадратора 8-1, где он возводится в квадрат, и с выхода последнего поступает на первый вход сумматора 5-1. Сигнал с выхода сумматора 5-3, пропорциональный разности измеренной и вычисленной нормальной перегрузки, поступает на вход квадратора 8-2, где он возводится в квадрат, и с выхода последнего поступает на второй вход сумматора 5-1. Сигнал с выхода сумматора 5-4, пропорциональный разности измеренной и вычисленной продольной перегрузки, поступает на вход квадратора 8-3, где он возводится в квадрат, и с выхода последнего поступает на третий вход сумматора 5-1. После суммирования выходных сигналов квадраторов 8-1, 8-2, 8-3 в сумматоре 5-1 сигнал поступает на вход блока 9 извлечения квадратного корня, на выходе которого и формируется сигнал, пропорциональный разности векторов измеренной и вычисленной перегрузок. Для исправных датчиков системы автоматического управления эта разность равняется единице, что и проверяется в компараторе 10, на первый вход которого поступает выходной сигнал блока 9 извлечения квадратного корня, а на второй вход - постоянный сигнал, пропорциональный единичной перегрузке, с источника 11 стабилизированного сигнала. При отказе одного или нескольких датчиков реализуемые в устройстве соотношения (4), (6) сигналов нарушаются, т.е. разность между векторами измеренной и вычисленной перегрузок становится отличной от единицы, что приводит к срабатыванию компаратора 10 и выдаче на его выход сигнала об отказе контролируемых датчиков.
Таким образом, обладая высокой эффективностью обнаружения отказов основных датчиков САУ самолета, устройство контроля не требует установки на борт избыточных комплектов этих датчиков при минимальном весе, стоимости и габаритах. Для контроля используется информация от уже имеющихся на борту самолета датчиков.
Изобретение относится к комплексному контролю исправности датчиков системы автоматического управления самолета. Наибольшее значение оно имеет для полетного контроля датчика скорости, датчика угла атаки, датчиков угловых скоростей и датчиков перегрузок по осям связанной системы координат. Технический результат заключается в повышении достоверности обнаружения отказа этих датчиков без избыточного приборного оборудования на борту самолета. Устройство состоит из четырех сумматоров, пяти умножителей, трех квадраторов, функционального преобразователя и блока извлечения квадратного корня, с помощью которых в компараторе происходит сравнение разности векторов измеренной и вычисленной по показаниям датчиков перегрузки, действующей на самолет, с ее заранее известным значением. При отличии этой разности от известного значения происходит срабатывание компаратора, сигнализирующего об отказе датчиков системы автоматического управления. 2 ил.
Устройство для контроля датчиков системы автоматического управления самолета, содержащее первый сумматор и компаратор, один из входов которого соединен с источником стабилизированного сигнала, отличающееся тем, что в него введены второй, третий и четвертый сумматоры, первый, второй, третий, четвертый и пятый умножители, первый и второй дифференциаторы, первый, второй, третий квадраторы, тангенсный функциональный преобразователь и блок извлечения квадратного корня, причем первый суммирующий вход второго сумматора соединен с выходом контролируемого датчика поперечной перегрузки, второй суммирующий вход с выходом первого умножителя, входы которого соединены с выходами контролируемых датчика угловой скорости рыскания и датчика скорости, третий суммирующий вход с выходом второго умножителя, входы которого соединены с выходом контролируемого датчика угловой скорости крена и выходом третьего умножителя, причем контролируемый датчик скорости соединен с одним входом третьего умножителя, а контролируемый датчик угла атаки через тангенсный функциональный преобразователь с другим входом третьего умножителя, первый суммирующий вход третьего сумматора соединен с выходом контролируемого датчика нормальной перегрузки, второй суммирующий вход через первый дифференциатор соединен с выходом третьего умножителя, а третий вычитающий вход с выходом четвертого умножителя, входы которого соединены с выходом четвертого умножителя, входы которого соединены с выходами контролируемых датчика угловой скорости тангажа и датчика скорости, первый суммирующий вход четвертого сумматора соединен с выходом контролируемого датчика продольной перегрузки, второй вычитающий вход через второй дифференциатор соединен с выходом контролируемого датчика скорости, а третий вычитающий вход с выходом пятого умножителя, входы которого соединены с выходом третьего умножителя и выходом контролируемого датчика угловой скорости тангажа, выходы второго, третьего и четвертого сумматоров соответственно через первый, второй и третий квадраторы соединены с первым, вторым и третьим суммирующими входами первого сумматора, выход которого через блок извлечения квадратного корня соединен с вторым входом компаратора, выход которого служит выходом устройства.
| SU, авторское свидетельство, 1592833, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Федоров С.М | |||
| и др | |||
| Автоматизированное управление полетом воздушных судов | |||
| - М.: Транспорт, 1992, с.160. | |||
