Р
1--i- ж
Jl11J
фигЛ
(Л
СП
12
;О CD СдЭ
/ л
те НЗ Iг- г-
ж
11J
14)
3150
Изобретение относится к технике управления, может быть использовано в металлорежущих станках с позиционными системами управления и являет- ся усовершенствованием устройства , известного по авт. св. N 1287106.
Целью изобретения является повышение надежности работы устройства путем выключения привода.
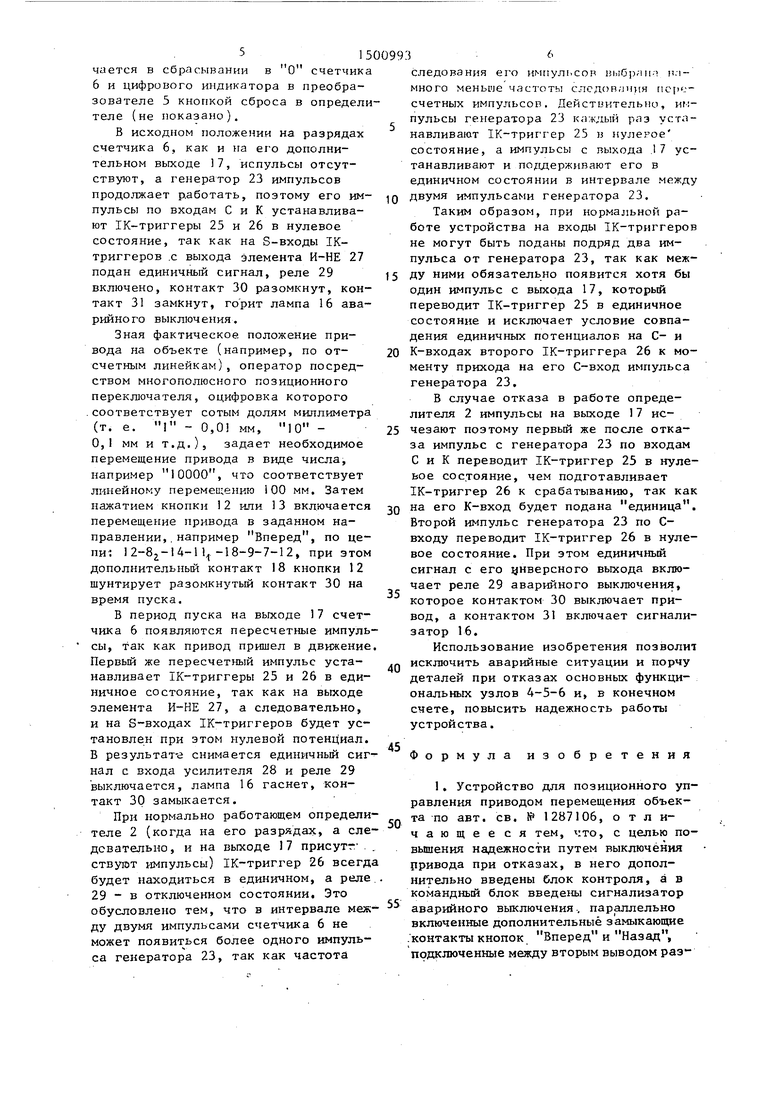
На фиг.1 представлена принципиальная схема устройства для позиционного управления приводом перемещения объекта; на фиг.2 - пример реализации двоично-десятичного декадного счетчика импульсов.
Устройство содержит элемент 1 задания места остановки, выполненньй в виде многополюсного позиционного переключателя , определитель 2 факти- ческого положения привода и командный блок 3.
Определитель 2 содержит последовательно соединенные фазочувствительный датчик 4 положения (выполненный, на- пример, на линейном индуктосине ДЛПУ аналогово-цифровой преобразователь 5 (на блоке индикации БИН-1И ) и двоично-десятичньй декадный счетчик 6 импульсов (т.е. с дешифратором на вы- ходе, который может быть выполнен на микросхемах К51 ШЕ1. и К51 1ЙД1 , см. фиг.2).
Командный блок 3 содержит рел.е 7 Вперед с контактами 7, и 7g , реле 8 Назад с контактами 8 и 82,.источ-. ник 9 питания, элемент И 10,реле 11 Стоп с размыкающим контактом 1 кнопку 12 Вперед, кнопку 13 Назад и размыка1ощий контакт 14 авартного концевого выключателя (не показан).
Количество полюсов элемента 1 задания места остановки выбрано равным количеству декад счетчика 6 импуль- сов, npjweM каждый полюс (1 - едини- ць, 10 - десятки и т.д.) имеет десять положений, т.е. по числу разря-. дон в каждой декаде счетчика.
Аналого-цифровой преобразователь 5 предназначен для запитки датчика 4 положения и преобразования его сигнала в цифровую форму с выводом показаний на табло индикации (не показано).
Новыми в устройстве являются блок 15 контроля работы определителя фактического положения привода, сигнализатор 16 его аварийного выключения, выполненный на электрической лампе, донолнительньш выход 17, которым снабжен счетчик .импульсов, и дополнительные замыкающие контакты 18, 19, которыми
снабжены кнопки 12 Вперед и 13 Назад.
Устройство характеризуется также новыми связями: дополнительный выход I7 подключен к входу 20 блока контроля, первый выход 21 которого включен последовательно с размыкающим контактом II реле 11 Стоп, а второй выход 22 через сигнализатор подключен к зажимам источника 9 питания, при зтом выход 21 блока шунтирован параллельно включенными дополнительными контактами 18, 19 кнопок 12 Вперед и 13 Назад.
Блок 15 контроля содержит генератор 23 импульсов низкой частоты, элемент ИЛИ 24, первый 25 и второй 26 1К-триггеры, элемент И-НЕ 27, усилитель 28 и реле 29 аварийного выключения с размыкающим 30 и замыкающим 31 контактами. Причем генератор импульсов связан с первым входом элемента ИЛИ, К-входом первого и С-вхо- дом -второго 1К-триггеров, вход блока связан с 1-входом первого 1К-тригге- ра, через второй вхсд элемента ИЛИ - с его С-входом и через первый вход элемента И-НЕ с S-входами 1К-тригге- ров, I- и К-входы второго 1К-тригге- ра связаны соответственно с прямым и инверсным выходами первого IK- триггера, а инверсный выход подключен к второму входу элемента И-НЕ и через усилитель к реле аварийного выключения, размыкающий контакт ко торого подключен к первому, а замыкающий - к второму выходам блока.
Двоично-десятичный декадный счетчик 6 импульсов состоит из стандартных счетчиков 32-34 и дещифраторов 35-37, выполненных., например на микросхемах У511ИЕ1 ИК5111-Щ1 соответственно. Параллельно выходам дешифратора 35 подсоединены элементы НЕ узла 38 инверторов, выходы которых через элемент ИЛИ 39 образуют дополж нительный выход 17,
Устройство работает следующим образом.
Исходное положение привода может быть установлено в любой точке рабочей зоны после его остановки (т.е. срабатывания реле 1 1 Стоп) и заключается в сбрасывании в О
150099 счетчика
6 и цифрового индикатора в преобразователе 5 кнопкой сброса в определителе (не показано).
В исходном положении на разрядах счетчика 6, как и на его дополнительном выходе 17, испульсы отсутствуют, а генератор 23 импульсов продолжает работать, поэтому его импульсы по входам С и К устанавливают 1К-триггеры 25 и 26 в нулевое состояние, так как на S-входы IK- триггеров .с выхода элемента И-НЕ 27 подан единичный сигнал, реле 29 включено, контакт 30 разомкнут, контакт 31 замкнут, го рит лампа 16 аварийного выключения.
Зная фактическое положение привода на объекте (например, по от- счетным линейкам), оператор посредством многополюсного позиционного переключателя, оцифровка которого .соответствует сотым долям миллиметра (т. е. 1 - 0,01 мм, 10 - 0,1 мм и т.д.), задает необходимое перемещение привода в виде числа, например 10000, что соответствует линейному перемещению i00 мм. Затем нажатием кнопки 12 или 13 включается перемещение привода в заданном направлении, . например Вперед, по це- ПИ1 12-8 -14-11 -18-9-7-12, при этом дополнительный контакт 18 кнопки 12 щунтирует разомкнутый контакт 30 на время пуска.
В период пуска на выходе 17 счетчика 6 появляются пересчетные импульсы, так как привод пршиел в движение Первый же пересчетный импульс устанавливает 1К-триггеры 25 и 26 в единичное состояние, так как на выходе элемента И-НЕ 27, а следовательно, и на S-входах 1К-триггеров будет установлен при этом нулевой потенциал. В результат-е снимается единичный сигнал с входа усилителя 28 и реле 29 выключается, лампа 16 гаснет, контакт 30 замыкается.
При нормально работающем определителе 2 (когда на его разрядах, а следовательно , и на выходе 17 присутг ствугот импульсы) 1К-триггер 26 всегд будет находиться в единичном, а реле 29 - в отключенном состоянии. Это обусловлено тем, что в интервале между двумя импульсами счетчика 6 не может появиться более одного импульса генератора 23, так как частота
5
0
5
0
5
0
5
0
5
36
следования его импульсов н.ч- много меньше частоты слсдс) счетных импульсов. Действительно, пульсы генератора 23 каждый раз устанавливают 1К-триггер 25 к иулерое состояние, а импульсы с выхода 17 устанавливают и пo щepживaют его в единичном состоянии в интервале между двумя импульсами генератора 23.
Таким образом, при нормальной работе устройства на входы 1К-триггеров не могут быть поданы подряд два импульса от генератора 23, так как между ними обязательно появится хотя бы один импульс с выхода 17, который переводит 1К-триггер 25 в единичное состояние и исключает условие совпадения единичных потенциалов на С- и К-входах второго 1К-триггера 26 к моменту прихода на его С-вход импульса генератора 23,
В случае отказа в работе определителя 2 импульсы на выходе 17 исчезают поэтому первый же после отказа импульс с генератора 23 по входам С и К переводит 1К-триггер 25 в нуле- ьое состояние, чем подготавливает 1К-триггер 26 к срабатыванию, так как на его К-вход будет подана единица. Второй импульс генератора 23 по С- входу переводит 1К-триггер 26 в нулевое состояние. При этом единичный сигнал с его унверсного выхода включает реле 29 аварийного выключения, которое контактом 30 выключает привод, а контактом 31 включает сигнализатор 16.
Использование изобретения позволит исключить аварийные ситуации и порчу деталей при отказах основньк функциональных узлов 4-5-6 и, в конечном счете, повысить надежность работы устройства.
Формула изобретения
1. Устройство для позиционного управления приводом перемещения объекта по авт. св. № 1287106, отличающееся тем, VTO, с целью по- вьшения надежности путем выключения рривода при отказах, в него дополнительно введены блок контроля, а в командный блок введены сигнализатор аварийного выключения., параллельно включенные дополнительные замыкающие .контакты кнопок Вперед и Назад, подключенные между вторым выводом разп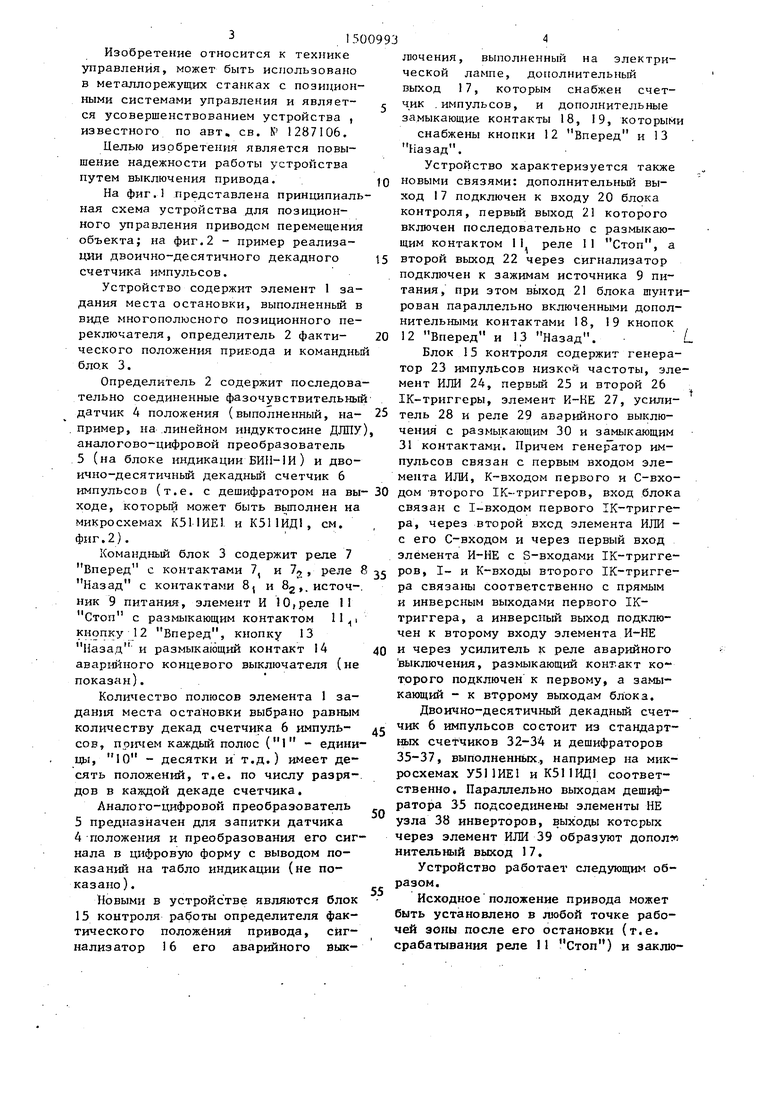
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для позиционного управления приводом перемещения объекта | 1985 |
|
SU1287106A1 |
| Устройство для числового программного управления станками | 1985 |
|
SU1291928A1 |
| Дешифратор команд телеуправления | 1990 |
|
SU1720676A1 |
| Устройство управления электрифицированной дождевальной машиной | 1990 |
|
SU1745158A1 |
| Устройство для управления автоматическими линиями обработки деталей | 1988 |
|
SU1521792A1 |
| Устройство формирования и регистрации путевых параметров для управления шахтной подъемной установкой | 1989 |
|
SU1835383A1 |
| Устройство для управления намоточным станком | 1978 |
|
SU792342A1 |
| Устройство для поверки электрических секундомеров | 1986 |
|
SU1392543A1 |
| Устройство для управления автоматическими линиями гальванопокрытий | 1983 |
|
SU1095136A1 |
| СИСТЕМА КОНТРОЛЯ АВТОМАТИЗИРОВАННЫХ ОБЪЕКТОВ ПО ТЕЛЕФОННЫМ ЛИНИЯМ | 1993 |
|
RU2054815C1 |
Изобретение относится к технике управления и может быть использовано в металлорежущих станках. Цель изобретения - повышение надежности путем выключения привода при отказах. Устройство содержит элемент 1 задания места остановки, определитель 2 фактического положения привода, включающий датчик 4 положения, аналого-цифровой преобразователь 5 и двоично-десятичный декадный счетчик 6 импульсов, командный блок 3 с кнопками 12, 13 "Пуск", реле 11 "Стоп" и источник 9 питания. Новым в устройстве является блок 15 контроля работы определителя, сигнализатор 16, дополнительный выход 17, которым снабжен счетчик 6 импульсов, дополнительные замыкающие контакты 18, 19 кнопок "Вперед" 12,"Назад" 13 с соответствующими связями. 1 з.п. ф-лы, 2 ил.
| Устройство для позиционного управления приводом перемещения объекта | 1985 |
|
SU1287106A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
