Изобретение относится к устрой- ствам управления позиционными приводами и к ддскретиям следящим системам и может быть использовано в различных областях автоматикиs на- пример в металлорежущих станках с позиционными системами управления.
Целью изобретения является сокращение времени на переналадку устройства, повышение надежности и точности позиционирования,
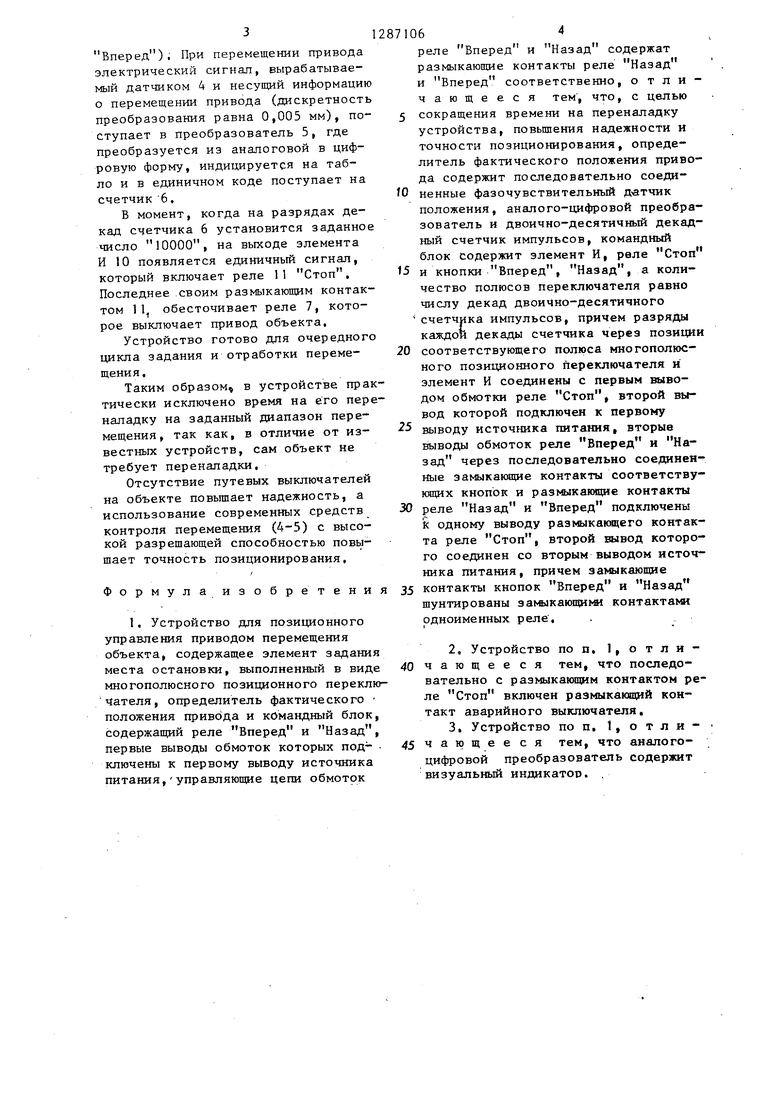
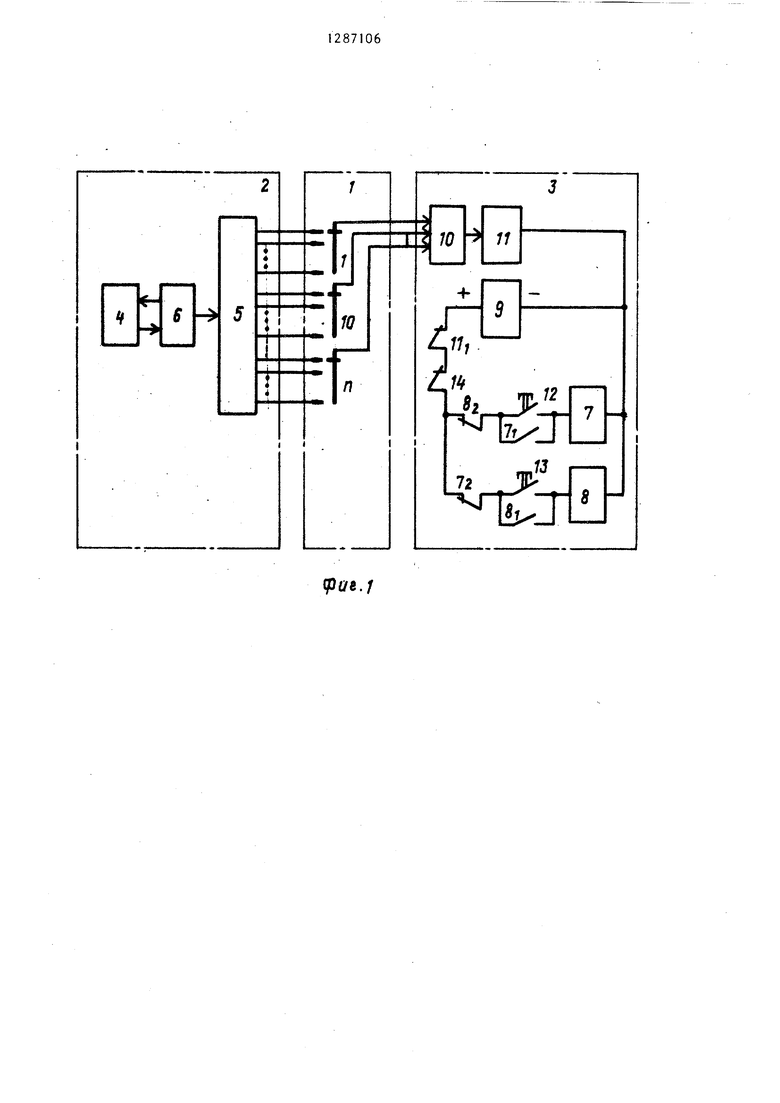
На фиг, 1 дана схема устройства для позиционного управления приводом перемещения объекта; на фиг, 2 - схема определителя фактического по- ложения привода,
Устройство для позиционного управления приводом перемещения объекта содержат элемент 1 задания места остановки, выполненный в виде многополюсного позиционного переключателя 5 определитель 2 фактического положения привода и командный блок 3
Определитель 2 содержит последо
вательно соединенные фазочувстви-тельньш датчик 4 положения, (выполненный, например, на линейном ин- дуктосине ДЛПУ по ОСТ-3965/77), аналого-цифровой преобразователь 5 и двоично-десятичный декадный счет- ки 6 импульсов (т,е, с дешифратором на выходе, который может быть выполнен на микросхемах К511ИЕ1 и К511ИД
Командный блок 3 содержит реле 7 Вперед с контактами 7, , 7 , реле назад с контактами 8 , 8, источник 9 питания, элемент И 0, реле 11 Стоп с размыкающим контактом 11 , кнопку 12 Вперед, кнопку 13 Наза и размыкающий контакт 14 аварийного выключателя;, фазочувствительный датчик 4 положения выполнен на индукто сине, содержит головку 15 и линейку 16.-Аналого-цифровой преобразо- ватель 5 содержит усилитель 17 сигнала линейки, фазовращатель 18, усилитель-ограничитель 19, заграждающий ключ 20, выпрямитель 21, компаратор 22, пороговые элементы
(на.триггере Шмнтта) 23-25, устройство 26 управления, абсолютный реверсивный счетчик 27, накоци тельный реверсивный счетчик 28, табло 29 индикации (на лампах ИН-14), логи- ческую схему 30 управления записью, пульт 3 преднабора, генератор 32 опорной частоты, делитель 33 частоты (1:2000), делитель 34 частоты
(1:2), цифровой шнротно-импульсный модулятор 35, согласующие клрочи 36 кнопки 37 и 38.
Количество полюсов многополюс- ного позиционного переключателя выбрано равным количеству декад счетчика (в рбщем случае п-полюсный, как показано на чертеже), причем каждый полюс (1 - единицы, 10 - десятки, ... и т.д.) имеет десять положений, т,е. по числу разрядов в каждой декаде счетчика.
Головка 15 индуктосина запитыва- ется от аналого-цифрового преобразователя 5 по двум каналам прямоугольными импульсами частотой 2,5 кГц, при этом импульсы одного канала имеют фазовый сдвиг относительно импульсов другого канала на 90, ас линейки 16 снимается напряжение рассогласования, которое-подается на усилитель 17 в блоке 5,
Аналого-цифровой преобразователь 5 предназначен для запитки индуктосина и преобразования его сигнала в цифровую форму с выводом показаний на табло индикации и выводом цифрового сигнала для связи с внешними устройствами, В общем случае аналого-цифровой преобразователь может не содержать визуального индикатора.
Устройство работает следующим образом.
Исходное положение привода может быть установлено в любой точке рабочей зоны после его остановки (т.е. срабатывания реле П Стоп) и заключается в сбрасывании в О, счетчика 6 и цифрового индикатора в преобразователе 5 (при его наличии), например, кнопкой сброса в определителе (не показано).
Зная фактическое положение привода на объекте (например, по от- счетным линейкам), оператор посредством многополюсного позиционного переключателя, оцифровка которого соответствует сотым долям миллиметра (т,е, 1 - 0,01 мм, 10 - 0,1 мм, и т,д.), залает необходимое перемещение привода в виде числа, например, 10000, что соответствует ливрейному перемещению 100 мм. Затем нажатием кнопки 12 или I3 включается перемещение привода в заданном направлении (например., кнопкой 12 включается реле 7
Вперед). При перемещении привода электрический сигнал, вырабатываемый датчиком 4 и несущий информацию о перемещении привода (дискретность преобразования равна 0,005 мм), поступает в преобразователь 5, где преобразуется из аналоговой в цифровую форму, индицируется на табло и в единичном коде поступает на счетчик 6,
В момент, когда на разрядах декад счетчика 6 установится заданное число 10000, на выходе элемента И 10 появляется единичный сигнал, который включает реле 11 Стоп , Последнее своим размыкающим контактом 11 обесточивает реле 7, которое выключает привод объекта.
Устройство готово для очередного цикла задания и отработки перемещения.
Таким образом, в устройстве практически исключено время на его переналадку на заданный диапазон перемещения, так как, в отличие от известных устройств, сам объект не требует перенападки.
Отсутствие путевых выключателей на объекте повьппает надежность, а использование современных средств контроля перемещения (4-5) с высокой разрешающей способностью повы- щает точность позиционирования.
Формулаизобретения
1. Устройство для позиционного управления приводом перемещения объекта, содержащее элемент задания места остановки, выполненный в виде многополюсного позиционного переклю- чателя, определитель фактического положения привЬда и командный блок, содержащий реле Вперед и Назад, первые выводы обмоток которых под- . кпючены к первому выводу источника питания, управляющие цепи обмоток
реле Вперед и Назад содержат размыкающие контакты реле Назад и Вперед соответственно, отличающееся тем, что, с целью
сокращения времени на переналадку устройства, повьщ1ения надежности и точности позиционирования, определитель фактического положения привода содержит последовательно соединенные фазочувствительный датчик
положения, аналого-цифровой преобразователь и двоично-десятичный декадный счетчик импульсов, командный блок содержит элемент И, реле Стоп
и кнопки Вперед, Назад, а количество полюсов переключателя равно числу декад двоично-десятичного счетчика импульсов, причем разряды каждой декады счетчика через позиции соответствующего полюса многополюсного позиционного переключателя и элемент И соединены с первым выводом обмотки реле Стоп, второй вывод которой подключен к первому выводу источника питания, вторые выводы обмоток реле Вперед и Назад через последовательно соединенные замыкакнцие контакты соответствующих кнопок и размыкающие контакты
реле Назад и Вперед подключены ic одному выводу раз№лкакмдего контакта реле Стоп, второй вывод которого соединен со вторым выводом источника питания, причем за ыкающие
контакты кнопок Вперед и Назад щунтированы замыкающими контактами одноименных реле.
2,Устройство по п. 1, о т л и - чающееся тем, что последовательно с размыкающим контактом реле Стоп включен размыкающий контакт аварийного выключателя.
3,Устройство по п. 1, о т л и - чающееся тем, что аналого- цифровой преобразователь содержит визуальный индикатор. .
1
n
W
11

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для позиционного управления приводом перемещения объекта | 1987 |
|
SU1500993A2 |
| СТАТИСТИЧЕСКИЙ АНАЛИЗАТОР ОТКЛОНЕНИЙ НАПРЯЖЕНИЯ | 1992 |
|
RU2041497C1 |
| АНАЛИЗАТОР ОТКЛОНЕНИЙ НАПРЯЖЕНИЯ | 1995 |
|
RU2106009C1 |
| Цифровой измерительный прибор | 1980 |
|
SU892309A1 |
| Счетчик импульсов | 1990 |
|
SU1758874A1 |
| Аналого-цифровой преобразователь | 1981 |
|
SU970680A1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЯ ДЛЯ РЕВЕРСИРОВАНИЯ ЭЛЕКТРОПРИВОДОВ | 1990 |
|
RU2105342C1 |
| УСТРОЙСТВО ДЛЯ ЦЕНТРАЛИЗОВАННОГО УПРАВЛЕНИЯ ГРУППОЙ ЭЛЕКТРОДВИГАТЕЛЕЙ ВИБРАТОРОВ | 2001 |
|
RU2220496C2 |
| Устройство для автоматического адресования объектов по кратчайшему пути | 1981 |
|
SU1025618A1 |
| УСТРОЙСТВО ДЛЯ ТЕКУЩЕГО КОНТРОЛЯ И СТАТИСТИЧЕСКОГО АНАЛИЗА ОТКЛОНЕНИЙ НАПРЯЖЕНИЯ | 1997 |
|
RU2130199C1 |

Изобретение относится к технике управления и может быть использовано в металлорежущих станках с позиционными системами управления,- Целью изобретения является сокращение времени на переналадку, повышение надежности и точности, позиционирования. Устройство для позиционного управления приводом перемещения объекта содержит элемент 1 задания места остановки, выполненный в виде многополюсного позиционного переключателя, командный блок и определитель 2 фактического положения привода, состоящий из последова тельно соединенных фазочувствительного датчика 4 положения, аналого-цифрового преобразователя 6 и двоично-десятичного декадного счетчика 5 импульсов, причем количество полюсов переключателя равно числу декад двоично-десятичного счетчика импульсов. Изобретение позволяет заменить путевые выключатели, устанавливаемые на объекте, средством подсчета мерных импульсов, т.е. обеспечить возможность задания точки позиционирования числовым значением. 2 з.п. ф-лы, 2 ил. о (Л о о
(pf/e./
Индуктосин ДППУ
ГТ I I г
Моично-десйтмныи счетчик (реверсивный.)
Составитель А, Исправникова Редактор К. Волощук Техред Л.Сердюкова Корректор М. Демчик
Заказ 7715/50 Тираж 862Подписное
ВНИИШ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, 4
Фиг. 2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО ДЛЯ ПОЗИЦИОННОГО УПРАВЛЕНИЯ | 0 |
|
SU408441A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для позиционного управления приводом перемещения объекта | 1975 |
|
SU570882A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
