1
Изобретение относится к автоматике и вычислительной технике и может быть использовано в системах программного управления станками для обработки деталей с большим числом тонкостенных ребер.
Целью изобретения является создание возможности коррекции эквиди- стант, образованных ломаными линиями
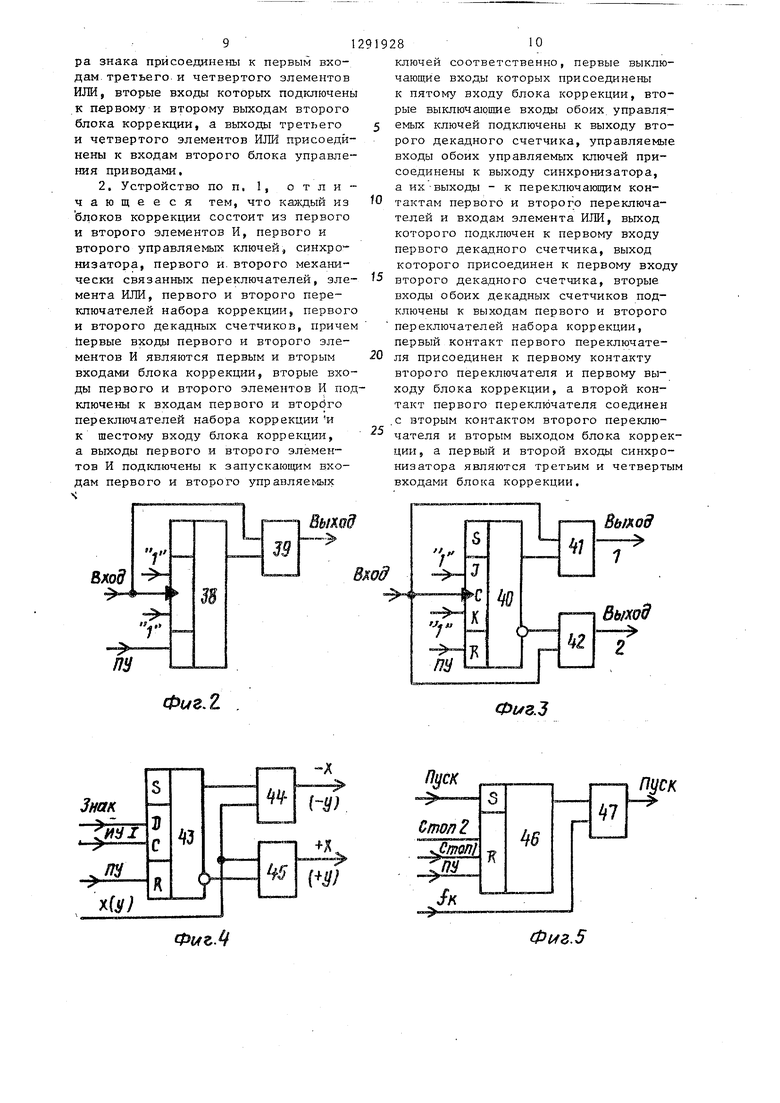
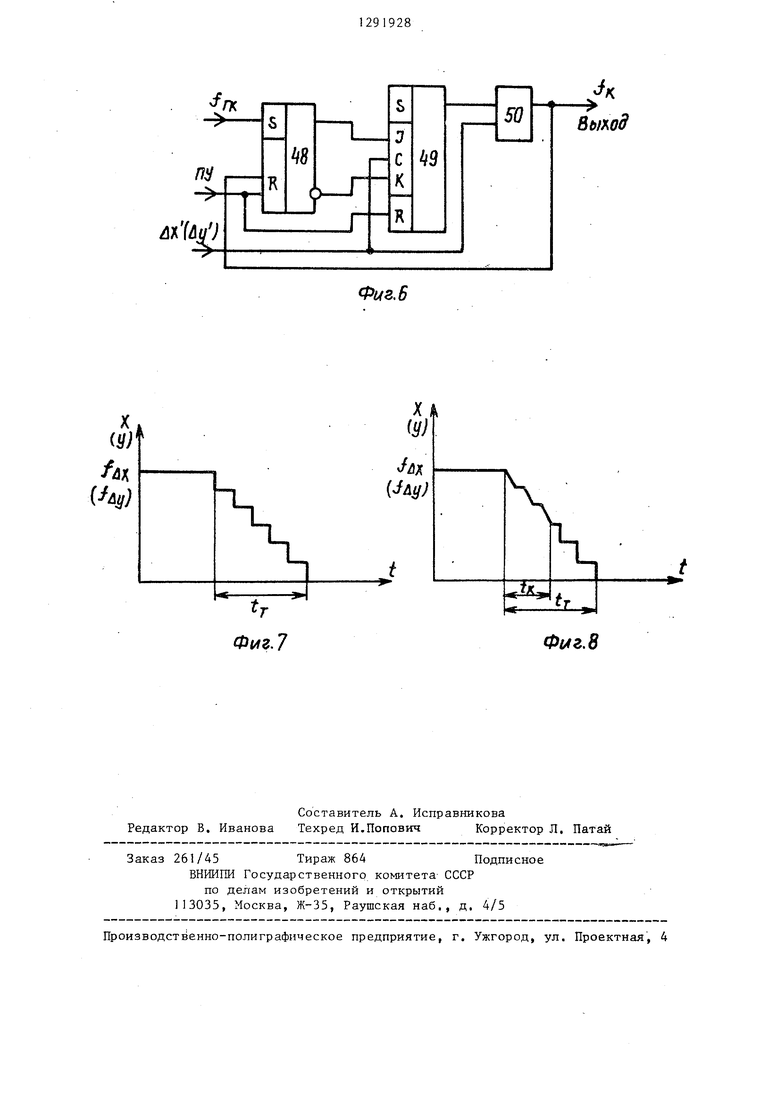
На фиг, 1 изображена схема устройства; На фиг, 2 - первый делитель частоты; на фиг, 3 - схема второго делителя частоты: на фиг, 4 - схема выбора знаков; на фиг, 5 - схе ма управляемого ключа; на фиг, 6 - схема синхронизатора; на фиг, 7 - график изменения выходной частоты системы при торможении и отсутствии коррекции; на фиг, 8 - график изменения выходной частоты системы при торможении и включенной коррекции.
Устройство состоит из блока 1 вво да программы, блока 2 задания скорости, интерполятора 3 на умножителях, первых делителей 4 и 5 частоты вторых делителей 6 и 7 частоты, узлов 8 и 9 выбора знака, элементов ИЛИ 10-13, блоков 14 и 15 управления приводами, приводов 16 и 17, исполнительных двигателей 18 и 19 с датчиками обратной связи, установленных на станке 20, запоминающих триггеров 21 и 22, генератора 23 частоты коррекции, блоков 24 и 25 коррекции по числу координат, каждый из которых состоит из двух элементов И 26 и 27, двух управляемых ключей 28 и 29, синхронизатора 30, меха нически связанных переключателей 31 и 32, элемента ИЛИ 33, переключателей 34 и 35 набора -коррекции, декадных счетчиков 36 и 37,
Схемы элементов устройства (фиг,2 6) приведены в варианте потенциальной логики с учетом широкого распространения интегральных элементов, В действительности устройство может быть выполнено на любой элементной базе, например на феррит-транзистор- нЪпс элементах или импульсно-потенци- альной базе, поэтому приведенные реализации следует считать вариантом.
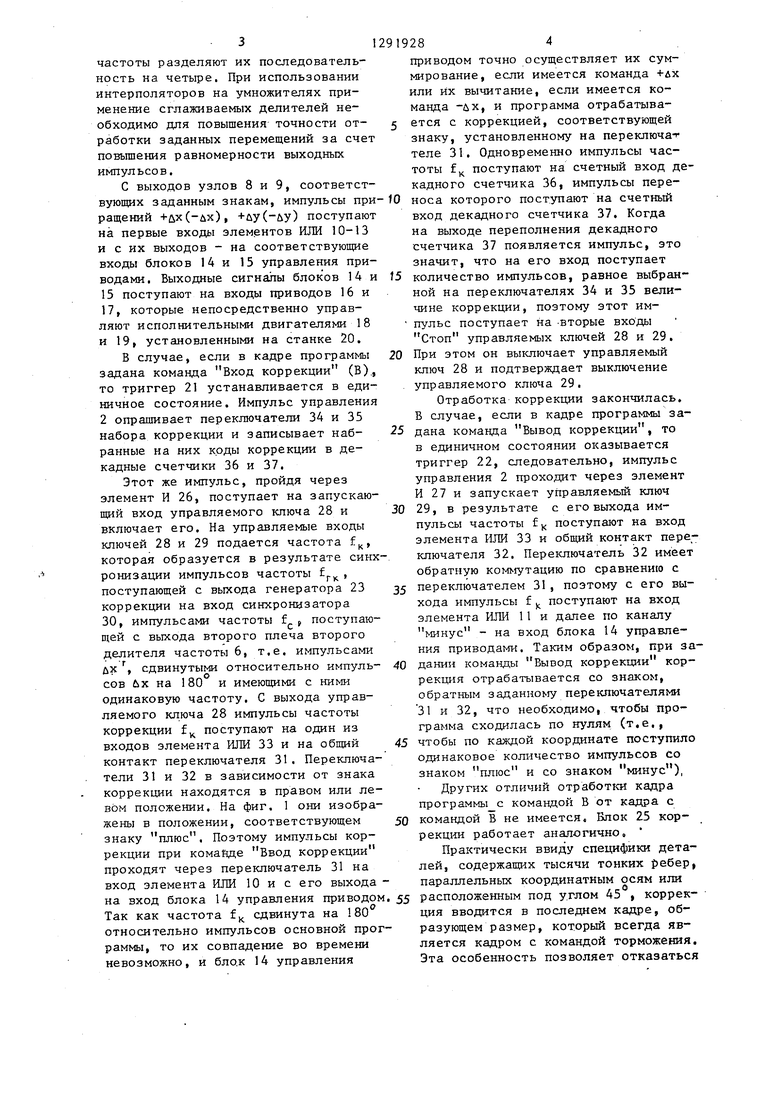
Первые делители 4 и 5 частоты (фиг,- 2) состоят из счетного 1К-триг гера 38 и элементов И 39, Как видно из фиг, 3, вторые делители 6 и 7 частоты состоят из счетного 1К-триг- гера 40 и элементов И 41 и 42, Узел
919282
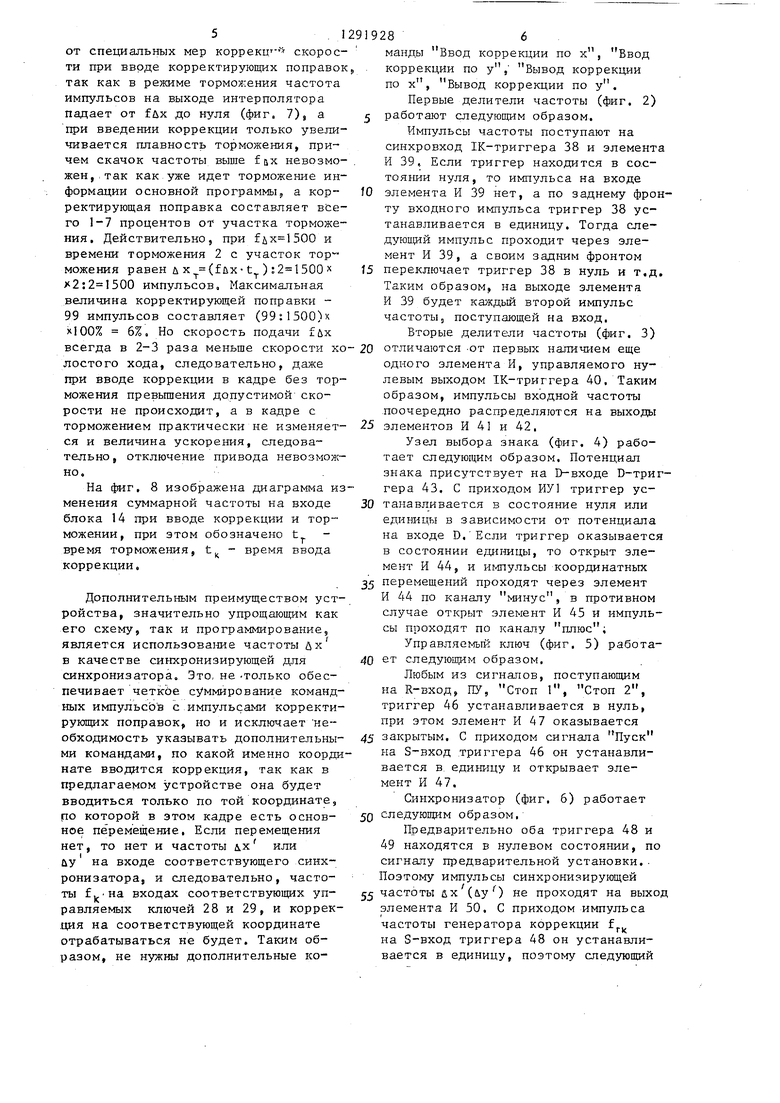
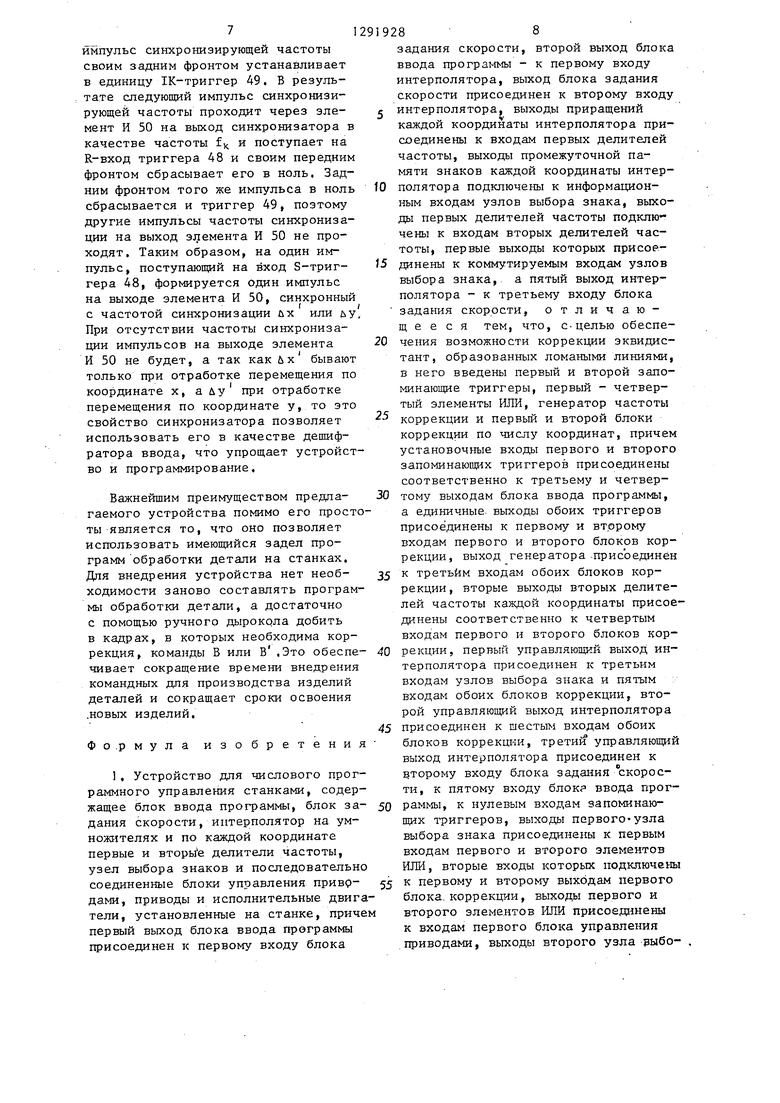
выбора знаков (фиг, 4) состоит из запоминающего D-триггера 43 и двух элементов И 44 и 45, Управляемые ключи 28 и 29 (фиг, 5) состоят из 5 запоминающего RS-триггера 46, имеющего один S- и три R-входа и элемента И 47, Синхронизатор 30 (фиг, 6) состоит из RS-триггера 48, имеющего один S- и два R-входа, 1К-триггера
Ш 49 и элемента И 50,
Устройство работает следующим образом.
Программа обработки (П) вводится, например, с помощью фотосчитывающе 5 го устройства в блок I ввода программы, причем сигналом начала ввода очередного кадра программы является импульс управления (ИУ) 3, который вырабатывается интерполятором 3 по
20 окончании отработки каждого кадра программы, после импульсов управления 1 и 2, Кроме того, ИУ 1-3 вырабатываются при нажатии кнопки Пуск на пульте управления интерполятора
(не показан) при запуске программы. Блок I ввода программы распределяет введенную информацию по блокам устройства следующим образом: информация о величинах координатных переме30 щений и их знаках ±х, iy заносится в промежуточную память интерполятора 3, информация о частоте отработки (подачи) F и команда торможения (Т) заносится в блок 2 задания скорости,
35 команды Ввод коррекции (В) и Вывод коррекции (в) устанавливают в единицу cooTBeTCTBeHiio триггеры 21 и 22, если, конечно, эти команды имеются в кадре, В случае, если вве40 денный кадр является кадром прог-. раммы, в котором не предусмотрена коррекция, т,е, отсутствуют команды В и В, то он отрабатывается следующим образом. По ИУ 1 знаки коорди45 натных перемещений из промежуточной памяти интер полятора 3 переписываются в узлы 8 и 9 выбора знаков. Кроме того, ИУ 1 выключает ключи 28 и 29, По ИУ 3 частота отработки кадра
50 fp начинает поступать с выхода блока 2 на вход второй интерполятора 3, при этом на его выходе появляются импульсы, соответствующие учетверенным координатным приращениям, т,е, 55 и 4ьу, Эти импульсы через делители 4-7 частоты соответственно поступают на коммутируемые входы узлов 8 и 9 выбора знаков, но уже в виде их, ь У, так как делители
частоты разделяют их последовательность на четыре. При использовании интерполяторов на умножителях применение сглаживаемых делителей необходимо для повышения точности отработки заданных перемещений за счет повышения равномерности выходных импульсов.
с выходов узлов 8 и 9, соответствующих заданным знакам, импульсы при ращений +йх(-лх), +лу(-&у) поступают на первые входы элементов ИЛИ 10-13 и с их выходов - на соответствующие входы блоков 14 и 15 управления приводами, Выходные сигналы блоков 14 и 15 поступают на входы приводов 16 и 17, которые непосредственно управляют исполнительными двигателями 18 и 19, установленными на станке 20.
В случае, если в кадре программы задана команда Вход коррекции (В)., то триггер 21 устанавливается в единичное состояние. Импульс управления 2 опрашивает переключатели 34 и 35 набора коррекции и записывает набранные на них коды коррекции в декадные счетчики 36 и 37.
Этот же импульс, пройдя через элемент И 26, поступает на запускающий вход управляемого ключа 28 и включает его. На управляемые входы ключей 28 и 29 подается частота f., которая образуется в результате синхронизации импульсов частоты , поступающей с выхода генератора 23 коррекции на вход синхронизатора 30, импульсами частоты f поступающей с выхода второго плеча второго делителя частоты 6, т.е. импульсами дх , сдвинутыми относительно импульсов Ьх на 180 и имеющими с ними одинаковую частоту. С выхода управляемого ключа 28 импульсы частоты коррекции f поступают на один из входов элемента ИЛИ 33 и на общий контакт переключателя 31. Переключатели 31 и 32 в зависимости от знака коррекции находятся в правом или левом положении. На фиг. 1 они изображены в положении, соответствующем знаку плюс. Поэтому импульсы коррекции при комайде Ввод коррекции проходят через переключатель 31 на вход элемента ИЛИ 10 и с его выхода на вход блока 14 управления приводом Так как частота f сдвинута на 80 относительно импульсов основной прор , то их совпадение во времени невозможно, и бло.к 14 управления
919284
приводом точно осуществляет их суммирование, если имеется команда +лх или их вычитание, если имеется команда -дх, и программа отрабатыва5 ется с коррекцией, соответствующей знаку, установленному на переключат теле 31. Одновременно импульсы частоты f поступают на счетный вход декадного счетчика 36, импульсы пере- 10 носа которого поступают на счетный вход декадного счетчика 37, Когда на выходе переполнения декадного счетчика 37 появляется импульс, это значит, что на его вход поступает
t5 количество импульсов, равное выбранной на переключателях 34 и 35 величине коррекции, поэтому этот им- пульс поступает на -вторые вхо ды Стоп управляемых ключей 28 и 29.
20 При этом он выключает управляемый ключ 28 и подтверждает выключение управляемого ключа 29.
Отработка коррекции закончилась, В случае, если в кадре программы за25 дана команда Вывод коррекции, то в единичном состоянии оказывается триггер 22, следовательно, импульс управления 2 проходит через элемент И 27 и запускает управляемьш ключ
30 29, в результате с его выхода импульсы частоты fj поступают на вход элемента ИЛИ 33 и общий контакт переключателя 32. Переключатель 32 имеет обратную коммутацию по сравнению с
35 переключателем 31, поэтому с его выхода импульсы f поступают на вход элемента ИЛИ 11 и далее по каналу минус - на вход блока 14 управления приводами. Таким образом, при за40 Дании команды Вывод коррекции коррекция отрабатывается со знаком, обратным заданнокгу переключателями 31 и 32, что необходимо, чтобы программа сходилась по нулям (т.е.,
45 чтобы по каждой координате поступило одинаковое количество импульсов со знаком плюс и со знаком минус),
Других отличий отработки кадра программы с командой В от кадра с
50 командой В не имеется. Влок 25 коррекции работает аналогично,
Практически ввиду специфики деталей, содержащих тысячи тонких ребер, параллельных координатным осям илн 55 расположенным под углом 45 , коррекция вводится в последнем кадре, образующем размер, который всегда является кадром с командой торможения. Эта особенность позволяет отказаться
от специальных мер коррекц скорости при вводе корректирующих поправок так как в режиме торможения частота импульсов на выходе интерполятора падает от дх до нуля (фиг. 7), а при введении коррекции только увеличивается плавность торможения, причем скачок частоты выше fax невозможен,, так как уже идет торможение информации основной программы, а корректирующая поправка составляет вСе- го 1-7 процентов от участка торможения. Действительно, при и времени торможения 2 с участок торможения равен U x(fux-1 ) ) импульсов. Максимальная величина корректирующей поправки - 99 импульсов составляет (99:1500)х 6%. Но скорость подачи fux всегда в 2-3 раза меньше скорости холостого хода, следовательно, даже при вводе коррекции в кадре без торможения превышения допустимой скорости не происходит, а в кадре с торможением практически не изменяется и величина ускорения, следовательно, отключение привода невозможно.
На фиг, 8 изображена диаграмма изменения суммарной частоты на входе блока 14 при вводе коррекции и торможении, при этом обозначено t - время торможения, t - время ввода коррекции.
Дополнительным преимуществом устройства, значительно упрощающим как его схему, так и программирование, является использование частоты их в качестве сиьгхронизирующей для синхронизатора. Это, не -только обеспечивает четкЬе суммирование командных импульсЬ в с,импульсами корректирующих поправок, но и исключает необходимость указывать дополнительными командами, по какой именно координате вводится коррекция, так как в предлагаемом устройстве она будет вводиться только по той координате, по которой в этом кадре есть основное перемещение. Если перемещения нет, то нет и частоты АХ или йу на входе соответствующего синхронизатора, и следовательно, частоты fif Ha входах соответствующих управляемых ключей 28 и 29, и коррекция на соответствующей координате отрабатываться не будет. Таким образом, не нужны дополнительные команды Ввод коррекции по х, Ввод коррекции по у, Вывод коррекции по х, Вывод коррекции по у.
Первые делители частоты (фиг. 2)
работают следующим образом.
Импульсы частоты поступают на синхровход 1К-триггера 38 и элемента И 39, Если триггер находится в со.с- тоянии нуля, то импульса на входе
элемента И 39 нет, а по заднему фронту входного импульса триггер 38 устанавливается в единицу. Тогда следующий импульс проходит через элемент И 39, а своим задним фронтом
переключает триггер 38 в нуль и т,д. Таким образом, на выходе элемента И 39 будет кшкдый второй импульс частоты, поступающей на вход.
Вторые делители частоты (фиг, 3)
отличаются -от первых наличием еще одного элемента И, управляемого нулевым выходом 1К-триггера 40, Таким образом, импульсы входной частоты .поочередно распределяются на выходы
элементов И 41 и 42,
Узел выбора знака (фиг. 4) работает следующим образом. Потенциал знака присутствует на ЕНвходе D-триг- гера 43, С приходом ИУ1 триггер устанавливается в состояние нуля или единицы в зависимости от потенциала на входе В, Если триггер оказывается в состоянии единицы, то открыт элемент И 44, и импульсы координатных
перемещений проходят через элемент И 44 по каналу минус, в противном случае открыт элемент И 45 и импульсы проходят по каналу
Управляемый ключ (фиг, 5) работаВТ следующим образом.
Любым из сигналов, поступающим на R-вход, ПУ, Стоп Г , Стоп 2, триггер 46 устанавливается в нуль, при этом элемент И 47 оказывается
закрытым. С приходом сигнала Пуск на S-вход триггера 46 он устанавливается в, единицу и открывает элемент И 47,
Синхронизатор (фиг, 6) работает
следующим образом.
Предварительно оба триггера 48 и 49 находятся в нулевом состоянии, по сигналу предварительной установки, Поэтому импульсы синхронизирующей
частоты йх (ьуО не проходят на выход элемента И 50. С приходом импульса частоты генератора коррекции f на S-вход триггера 48 он устанавливается в единицу, поэтому следующий
импульс синхронизирующей частоты своим задним фронтом устанавливает в единицу 1К-триггер 49. В результате следующий импульс синхронизирующей частоты проходит через элемент И 50 на вькод синхронизатора в качестве частоты fx; и поступает на R-вход триггера 48 и своим передним фронтом сбрасывает его в ноль. Задним фронтом того же импульса в ноль сбрасывается и триггер 49, поэтому другие импульсы частоты синхронизации на выход элемента И 50 не проходят. Таким образом, на один импульс, поступающий на вход S-триг- гера 48, формируется один импульс на выходе элемента И 50, синхронный с частотой синхронизации ьх или ьу При отсутствии частоты синхронизации импульсов на выходе элемента И 50 не будет, а так как &х бывают только при отработке перемещения по координате х, а лу при отработке перемещения по координате у, то это свойство синхронизатора позволяет использовать его в качестве дешифратора ввода, что упрощает устройство и программирование.
Важнейшим преимуществом предлагаемого устройства помимо его простты является то, что оно позволяет использовать имеющийся задел программ обработки детали на станках. Для внедрения устройства нет необходимости заново составлять программы обработки детали, а достаточно с помощью ручного дырокола добить в кадрах, в которых необходима коррекция, команды В или В .Это обееое чивает сокращение времени внедрения командных для производства изделий деталей и сокращает сроки освоения .новых изделий.
Фо.рмула изобретения
1. Устройство для числового программного управления станками, содержащее блок ввода программы, блок задания скорости, интерполятор на умножителях и по каждой координате первые и вторы е делители частоты, узел выбора знаков и последовательно соединенные блоки управления привр- дами, приводы и исполнительные двигатели, установленные на станке, причем первый выход блока ввода программы присоединен к первому входу блока
40
25
919288
задания скорости, второй выход блока ввода nporpai-iMbi - к первому входу интерполятора, выход блока задания скорости присоединен к второму входу
2 интерполятора, выходы приращений
каждой координаты интерполятора присоединены к входам первых делителей частоты, выходы промежуточной памяти знаков каждой координаты интер10 полятора подключены к информационным входам узлов выбора знака, выходы первых делителей частоты подключены к входам вторых делителей частоты, первые выходы которых присое15 динены к коммутируемым входам узлов выбора знака, а пятый выход интерполятора - к третьему входу блока задания скорости, отличающееся тем, что, с-целью обеспе20 чения возможности коррекции эквидис- тант, образованных ломаными линиями, в него введены первый и второй запоминающие триггеры, первый - четвертый элементы ИЛИ, генератор частоты коррекции и первый и второй блоки коррекции по числу координат, причем установочные входы первого и второго запоминающих триггеров присоединены соответственно к третьему и четвертому выходам блока ввода программы, а единичные- выходы обоих триггеров присоединены к первому и второму входам первого и второго блоков коррекции, выход генератора-присоединён к третьим входам обоих блоков коррекции, вторые выходы вторых делителей частоты каждой координаты присоединены соответственно к четвертым входам первого и второго блоков коррекции, первый управляюпщй выход интерполятора присоединен к третьим входам узлов выбора знака и пятым : входам обоих блоков коррекции, второй управляющий выход интерполятора
45 присоединен к шестым входам обоих блоков коррекции, третий управляющий выход интерполятора присоединен к второму входу блока задания скорости, к пятому входу блок ввода прог50 раммы, к нулевым входам запоминающих триггеров, выходы первого-узла выбора знака присоединены к первым входам первого и второго элементов ИЛИ, вторые входы которых подключены
55 к первому и второму выходам первого блока.коррекции, выходы первого и второго элементов ИЛИ присоединены к входам первого блока управления приводами, выходы второго узла рыбо- ,
30
35
pa знака присоединены к первым входам третьего и четвертого элементов ИЛИ, вторые входы которых подключены к первому и второму выходам второго блока коррекции, а выходы третьего и четвертого элементов ИЛИ присоединены к входам второго блока управления приводами.
2, Устройство по п, 1, отличающееся тем, что каждый из блоков коррекции состоит из первого и второго элементов И, первого и второго управляемых ключей, синхронизатора, первого и. второго механически связанных переключателей, элемента ИЛИ, первого и второго переключателей набора коррекции, первого и второго декадных счетчиков, причем йервые входы первого и второго элементов И являются первым и вторым входами блока коррекции, вторые входы первого и второго элементов И подключены к входам первого и второго переключателей набора коррекции и к шестому входу блока коррекции, а выходы первого и второго элементов И подкЛ Ючены к запускающим входам первого и второго управляемых S
ключей соответственно, первые выключающие входы которых присоединены к пятому входу блока коррекции, вторые выключающие входы обоих управляемых ключей подключены к выходу второго декадного счетчика, управляемые входы обоих управляемых ключей присоединены к выходу синхронизатора, а их-выходы - к переключающим контактам первого и второго переключателей и входам элемента ИЛИ, выход которого подключен к первому входу первого декадного счетчика, выход которого присоединен к первому входу второго декадного счетчика, вторые входы обоих декадных счетчиков подключены к выходам первого и второго переключателей набора коррекции, первый контакт первого переключателя присоединен к первому контакту второго переключателя и первому выходу блока коррекции, а второй контакт первого переключателя соединен .с вторым контактом второго переключателя и вторым выходом блока коррекции, а первый и второй входы синхронизатора являются третьим и четвертым входами блока коррекции.
Фиг. Z .
ФA/г.J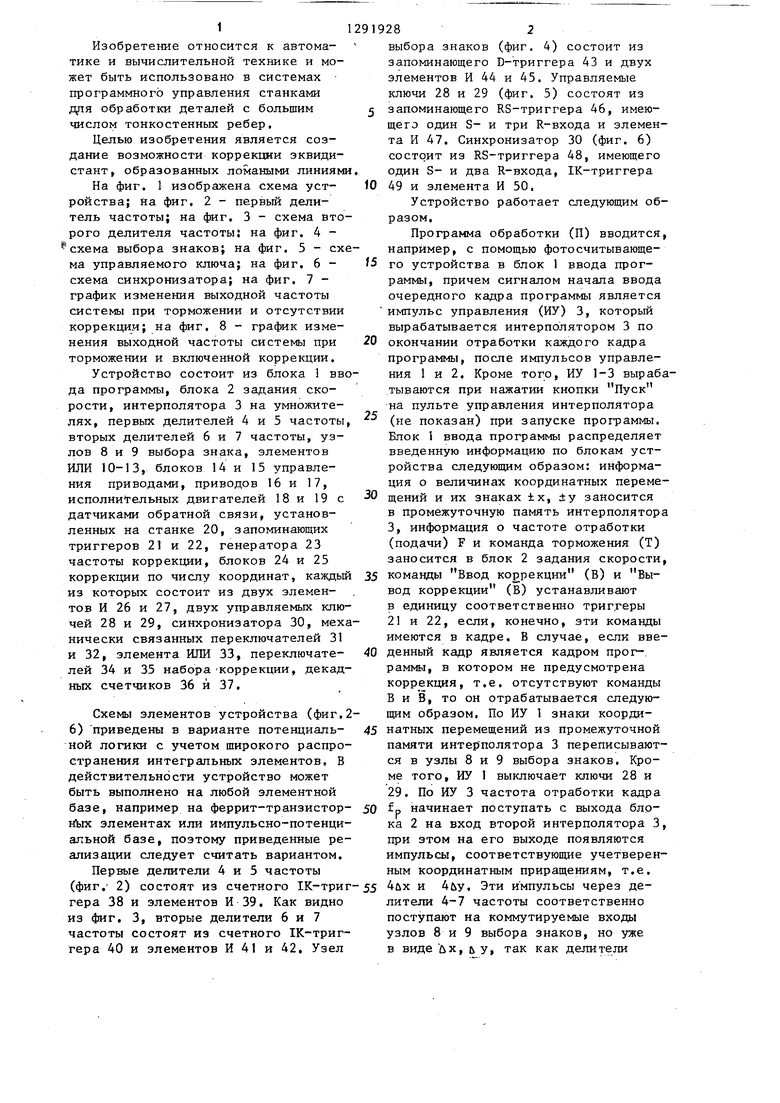
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления | 1986 |
|
SU1376065A1 |
| Устройство для задания программы | 1979 |
|
SU849148A1 |
| Устройство для программного управления | 1985 |
|
SU1280571A1 |
| Система для программного управления | 1984 |
|
SU1246053A1 |
| Программное задающее устройство | 1981 |
|
SU991376A1 |
| Устройство для программного управления | 1981 |
|
SU976428A1 |
| Система адаптивного числового программного управления металлорежущим станком | 1980 |
|
SU954945A1 |
| Устройство стабилизации скорости резания для токарных станков с ЧПУ | 1983 |
|
SU1136112A1 |
| Устройство для программного управления | 1986 |
|
SU1397878A1 |
| Устройство для программного управления станком | 1979 |
|
SU862119A1 |
Изобретение относится к области автоматики и вычислительной техники и может быть использовано в системах программного управления станками для П обработки деталей с большим числом тонкостенных ребер. Целью изобретения является обеспечение возможности коррекции эквидистант, образованных ломанными линиями. Указанная цель достигается тем, что в устройство для числового программного управления дополнительно введены запоминаюш е триггеры 21 и 22, четыре элемента ИЛИ 10-13, генератор частоты коррекции 23 и первый и второй блоки коррекции 24, 25 по числу координат, причем каждый из блоков коррекции состоит из первого и второго элементов И 26, 27, первого и второго управляемых ключей 28, 29, Элемента ИЛИ 33, первого и второго пере- кпючателей набора коррекции 34, 35, синхронизатора 30, декадных счетчиков 36, 37. 1 з.п. ф-лы, 8 ил. Мк SS (Л
Пуск
Ф(А.
Фиг.5
Фиг, 6
| Устройство для программного кправления | 1976 |
|
SU591824A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Сб | |||
| Электроавтоматика станков | |||
| Способы подготовки программ и интерполяторы для контурных систем число- вого управления станками | |||
| М.: Машиностроение, 1970, с | |||
| Способ подготовки рафинадного сахара к высушиванию | 0 |
|
SU73A1 |
| Нивелир для отсчетов без перемещения наблюдателя при нивелировании из средины | 1921 |
|
SU34A1 |
