ю
ГС
4;
Фив.}
HsofipercHHK )тиосится к элсктро- техники, к им1:у,чьсммм электродвигателям, и может быть использовано в позиционных устройствах для перемещения подвижного элемента а плоскости, в манипуляторах, робототехнике.
Цель изобретения - повьпление надежности путем повышения жесткости фиксации якоря.
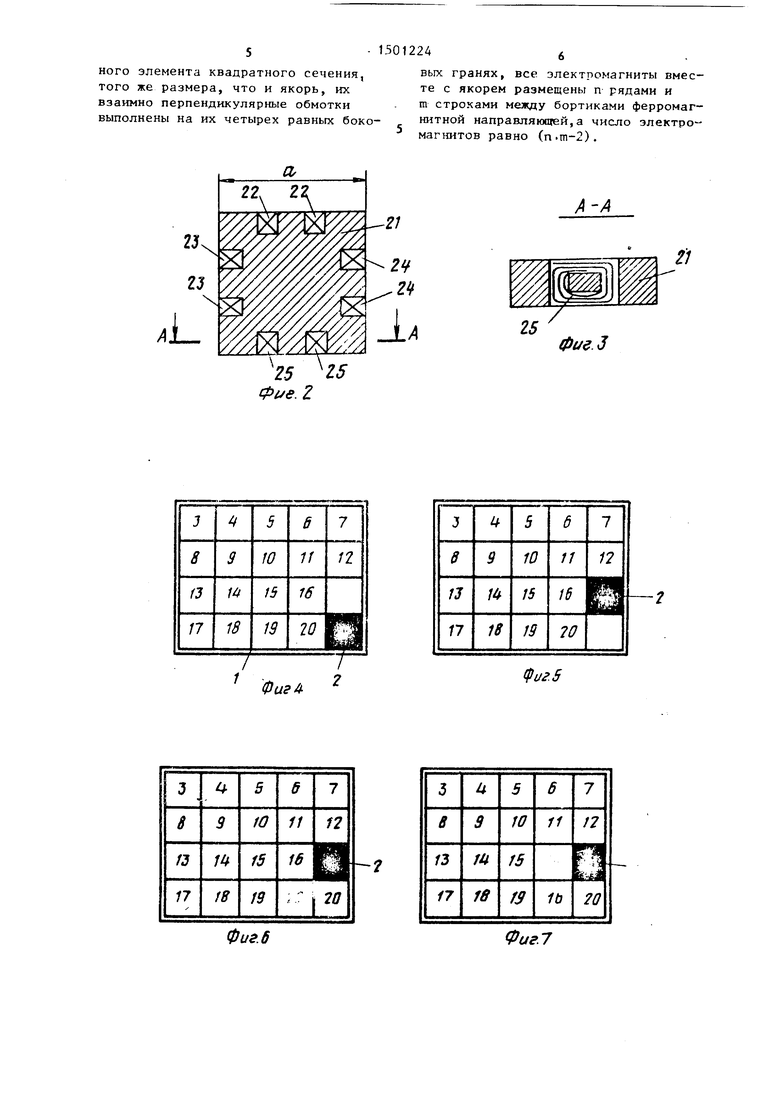
На фиг.1 показан электродвигател общий вид; на фиг.2 - электромагнит на фиг.3 - сечение Л-А на фиг.2; на фиг«4-9 - этапы отработки перемещения двигателем.
Двухкоординатный шаговый двигатель содержит плоскую направляющую 1, представляющую собой прямоугольную пластину с ферромагнитными бортиками по краям жестко закрепленными к ней, ферромагнитный якорь 2, имеющий в сечении, параллельном основанию, квадратную форму, электромагниты 3-20, повторяющие форму и размеры якоря 2. В каждом электромагните, например, 21 (фиг.2), выполненном из ферромагнитного материала, на четырех боковых гранях уложены обмотки 22-25 управления. Все электромагниты 3-20 и якорь размещены П (1рядами и та -строками между бортиками ферромагнитной направляющей. Расстояние между противоположными бортиками равно соответственно а.п и , где а - длина стороны электромагнитов и якоря, а число электромагнитов равно (n«rn-2).
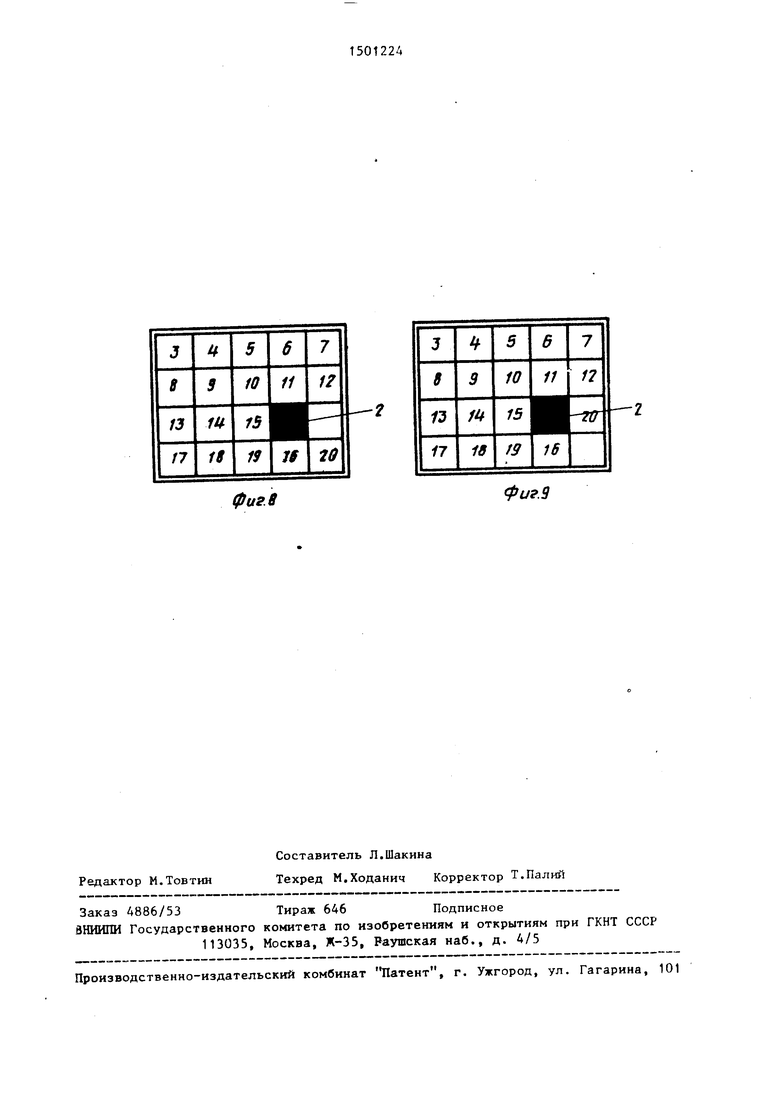
Таким образом, якорь 2 злнял положение, на котором в исходном состоянии находился электромагнит 16. При этом якорь 2 жестко зафиксирован, поскольку вверх ему не дают перемещаться электромагниты 6, 11, упирающиеся в верхний бортик, вниз не дает перемещаться электромагнит
16, влево - электромагниты 13, 1А, 15, а вправо - электромагнит 20. Следовательно, жесткость фиксации якоря 2 определяется не силами трения, как в прототипе, а механической прочкостью бортиков и электромагнитов 3-20.
Производя переключение по соответствующему алгоритму обмоток электромагнитов 3-20 для рассматриваемой
конструкции двигателя, якорь 2 может занимать 20 жестко фиксированных положений на плоскости.
На якоре может быть жестко закреплена обрабатываемая заготовка
и ее механическую обработку можно производить после необходимой ориентации на плоскости, осуществляемой с помощью npejviaraeMoro дяига- теля, не снимая tie с якоря 2 двигателя ввиду его жесткой механической фиксации. Поскольку силы, действующие на заготовку при механической обработке, велики, двигатель по прототипу может лишь использоваться,
как транспортное устройство, с кото рого заготовку перед ее обработкбй ,необходимо снимать и жестко закреплять в каком-либо приспособлении.
| название | год | авторы | номер документа |
|---|---|---|---|
| Планетарный шаговый электродвигатель | 1986 |
|
SU1605298A1 |
| ЛИНЕЙНЫЙ ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2002 |
|
RU2222091C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ЛИНЕЙНЫЙ ДВИГАТЕЛЬ | 1999 |
|
RU2153758C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ЛИНЕЙНЫЙ ДВИГАТЕЛЬ | 1999 |
|
RU2149493C1 |
| Шаговый электромагнитный двигатель | 1987 |
|
SU1501223A1 |
| ЛИНЕЙНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 2000 |
|
RU2166829C1 |
| ЛИНЕЙНЫЙ ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2002 |
|
RU2227957C1 |
| ЛИНЕЙНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 2000 |
|
RU2168836C1 |
| Шаговый электродвигатель | 1990 |
|
SU1758791A1 |
| Линейный асинхронный электродвигатель | 1980 |
|
SU920976A1 |
Изобретение относится к электротехнике и может быть использовано в позиционных устройствах для перемещения подвижного элемента в манипуляторах, робототехнике. Цель состоит в повышении надежности путем повышения жесткости фиксации якоря. Устройство содержит ферромагнитную направляющую с ферромагнитными буртиками на концах, между которыми N-рядами и M-строками уложены якорь 2 и /N.M-2/ электромагнитов 3-20 одинаковой формы и размера, электромагниты 3-20 имеют на четырех боковых гранях обмотки управления. В результате переключения электромагнитов 3-20 якорь 2 оказывается жестко зафиксированным,поскольку ему не дают перемещаться ни в одну сторону соседние электромагниты, либо бортики направляющей 1. Жесткость такой его фиксации определяется не силами трения, а механической прочностью бортиков направляющей 1 и электромагнитов 3-20. На якоре 2 может быть закреплена обрабатываемая заготовка. Ее механическую обработку можно производить после необходимой ориентации на плоскости, не снимая ее с якоря ввиду ее жесткой фиксации на нем. 9 ил.
Двигатель работает следующим образом.
Пусть в исходном состоянии якорь 2 и электромагниты 3-20 занимают положение на фиг.4. Пусть требуется переместить якорь на место электро- магнита 16. В этом случае подают ток в правую обмотку электромагнита 13, а затем в нижнюю обмотку того же электромагнита 12, при этом электромагнит 12 притянется к правому ферромагнитному бортику и притянет к себе якорь 2 (фиг.5). Затем включается правая обмотка электромагнита 20 (фиг.6), потом нижняя обмотка электромагнита 16 (фиг.7), после чего включается нижняя, а затем правая обмотка электромагнита 15 (фиг.8), а потом включается верхняя обмотка электромагнита 20 (фиг.9).
О
0
Oж дaeмый эффект от использования изобретения - простота получения шаговых перемещений.
Формула изобретения
Двухкоординатный шаговый электродвигатель, содержащий плоск то фер- ромагнитую направляющую, электромагниты с взаимно перпендикулярными обмотками, жестко соединенные между со бой, и якорь квадратного сечения, отличающийся тем,что, с целью повьшения надежности путем повышения жесткости фиксации якоря, плоская ферромагнитная направляющая вьшолнена на краях с жестко соединенными с ней ферромагнитными бортами, а жестко соединенные между собой электромагниты выполнены в виде пдного элемента квадратного сечения, того же размера, что и якорь, их взаимно перпендикулярные обмотки выполнены на их четырех равных боко23
8
Ю
11
12
tJ
W
15
17
18
19
Фиг 4
2
8
Ю
11
12
1U
18
15
1В
16
ш 20
Фиг. 6
вых гранях, все электромагниты вместе с якорем размещены п рядами и m строками между бортиками ферромагнитной направляющей,а число электромагнитов равно (n.m-2).
21
А А
т
25
/
Фив 3
фиг. 5
в
10
13
fU
15
17
rff
f3
1b
Фиг.7
фиг в
фиг.9
| Патент США Г 3935486, кл | |||
| Приспособление для съемки жилетно-карманным фотографическим аппаратом со штатива | 1921 |
|
SU310A1 |
| Шаговый электродвигатель | 1983 |
|
SU1134993A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
