Изобретение относится к электро- т,ехнике, а именно к шаговым электродвигателям, и может быть использовано в системах позиционирования станков, контрольных и сборочных устройств.
Цель изобретения - расширение функциональных возможностей путем обеспечения дополнительного враща - тепьного движения.
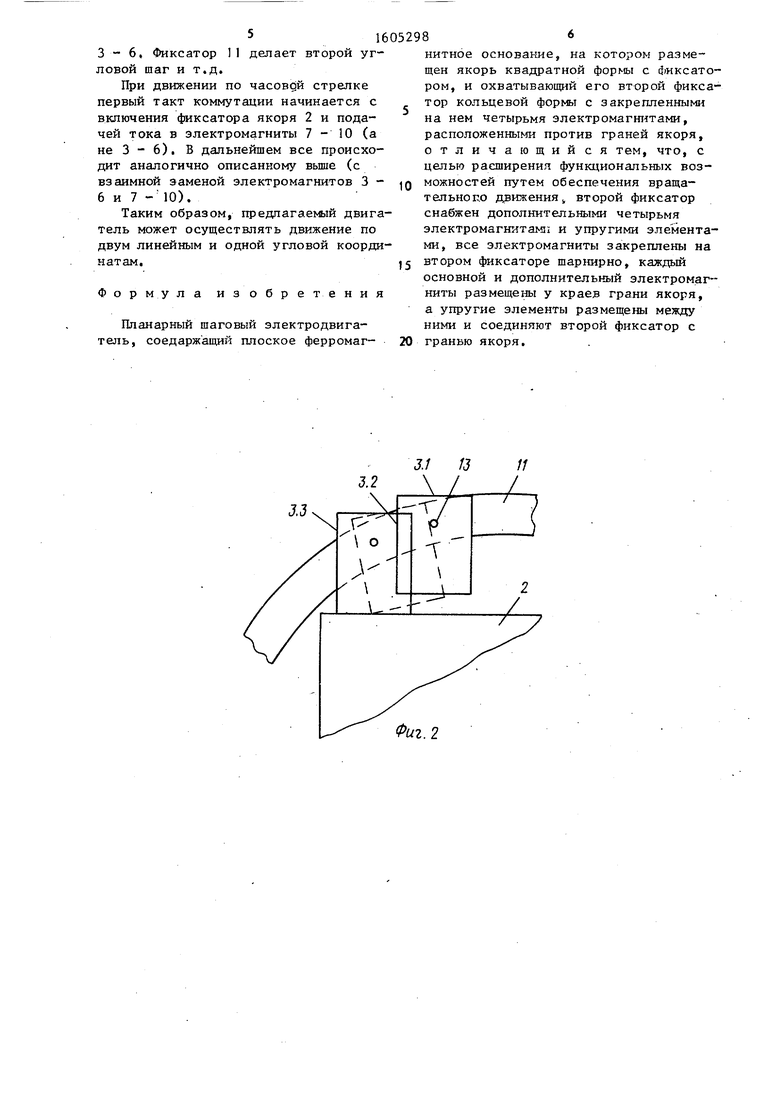
, На фиг.I изображен предпагаемьш электродвигатель, вид сверху; на фиг.2 - фазы ориентации одного из электромагнитов; на фиг.З - электродвигатель при полном притяжении электромагнитов к якорю, вид сверху.
Шаговый двигатель содержит плоское ферромагнитное основание 1, якорь 2
с электромагнитным фиксатором, систему электромагнитов 3-10, связанных между собой общим вторым электромагнитным фиксатором 11 кольцевой формы, и упругих элементов, например пружин 12, предназначенных дпя центровки системы электромагнитов относительно якоря 2. Каждый из электромагнитов 3-10 установлен на оси 13 с возможностью поворота в плоскости, парал
лельной основанию ) ,
Работа электродвигателя при поступательном движении.
На первом такте коммутации ток подается в обмотку элекТромагнт-гтного фиксатора якоря 2 и в обмотки пары электромагнитов, расположенных напротив одной из граней якоря (например 3 и 7). При этом система электромагнитов 3-10 -перемещается на величину зазора между якорем 2 и электромагни- тами 3-7. На втором такте комм тации ток снимается с обмотрк фиксатора якоря 2 и электромагнитов 3 и 7 и подается в обмотку второго фиксатора 1 и в электромагниты 5 и 9, После это- го перемещение в том же направлении на величину зазора совершает якорь 2, В дальнейшем при определенной коммутации тока в электромагнитах и фиксаторах якорь 2 и система электромагнитов 3-10 с вторым фиксатором 11 перемещаются в одном направлении. Дпя получения движения в перпендикулярном направлении ток поочередно коммутируется в обмотки электромагнитов 4,8 и. 6,10, а также поочередно в об- мотки обоих фиксаторов. Для получения движения под углом в 45 по отношению к упомянутым выше направле
0
5
0
,c Q
ниям движения, ток поочередно подается в обмотки электромагнитов 3,7,4,8 и 5,9,6,10, а аткже поочередно в обмотки обоих фиксаторов. Еще одно направление движения, перпендикулярного предыдущему, получается аналогичной подачей тока в электромагниты 3,4,6,
10и 4,8,5,9 и в оба фиксатора. Работа двигателя при вращательном
движении, например, .против часовой стрелки.
Па первом такте коммутации ток подается в обмотку фиксатора якоря 2 и в обмотки электромагнитов 3-6. Создается вращающий момент, стремящийся повернуть второй фиксатор 11 с системой электромагнитов 3-10 против часовой стрелки. Зазоры между электромаг0 нитами 3 - 6 и якорем 2 начнут уменьшаться, фиксатор 11 с электромагнитами при этом поворачивается. На фиг.2 изображены три положения электромаг нита 3 (аналогичные положения зани5 мают также электромагниты 4-6 при i его перемещении к якорю 2). В некотором промежуточном положении электромагнит 3 за счет поворота относитель- но оси 13 притягивается.левым углом к якорю 2 и занимает п оложение 3,2 (3.1 - исходное положение). В дальнейшем притягивается к якорю 2 и правый угол электромагнита 3, при этом возможно некоторое перемещение уже при- тящ того левого угла вдоль грани якоря 2. Электромагнит 3 занимамет конечное положение 3.3, в котором он полностью притянут к якорю 2 (то же самое с электромагнитами 4-6). На фиг.З показан двигатель после первого такта коммутации, при этом фиксатор
11с электромагнитами 3-10 повернут на некоторый угол против часовой . стрелки.
Подается ток в обмотку фиксатора - 1I, при этом снимается ток с обмоток фиксатора, обмоток электромагнитов 3 6 и подается в обмотки электромагнитов 7 - 10. Якорь 2, поворачиваясь против часовой стрелки, притя- г ивается к электромагнитам 7 - 10 (с повторением явлений, описанных выше для электромагнита 3, независимо от того, что притягивается к электромагнитам якорь 2). Подается ток в обмотку фиксатора якоря -2, снимается ток с фиксатора 11 электромагнитов 7 - 10 и подается в электромагниты
3-6, Фиксатор II делает второй угловой шаг и т.д.
При движении по часовдй стрелке первый такт коммутации начинается с включения фиксатора якоря 2 и подачей тока в электромагниты 7 - 10 (а не 3 - 6). В дальнейшем все происходит аналогично описанному вьше (с взаимной заменой электромагнитов 3 - 6 и 7 ).
Таким образом, предлагаемый двигатель может осуществлять движение по двум линейным и одной угловой координатам,
Фор м у ла изобретения
Планарный шаговый электродвигатель, соедарж ащий плоское ферромагнитное основание, на котором размещен якорь квадратной формы с фиксатором, и охватывающий его второй фиксатор кольцевой формы с закрепленными на нем четырьмя электромагнитами, расположенными против граней якоря, отличающий ся тем, что, с целью расширения функциональных возможностей путем обеспечения враща- тельноко движения второй фиксатор снабжен дополнительными четырьмя электромагнитами и упругими элементами, все электромагниты закреплены на
втором фиксаторе шарнирно, каждый
основной и дополнительный электромагниты размещены у краев грани якоря, а упругие элементы размещены между ними и соединяют второй фиксатор с
гранью якоря.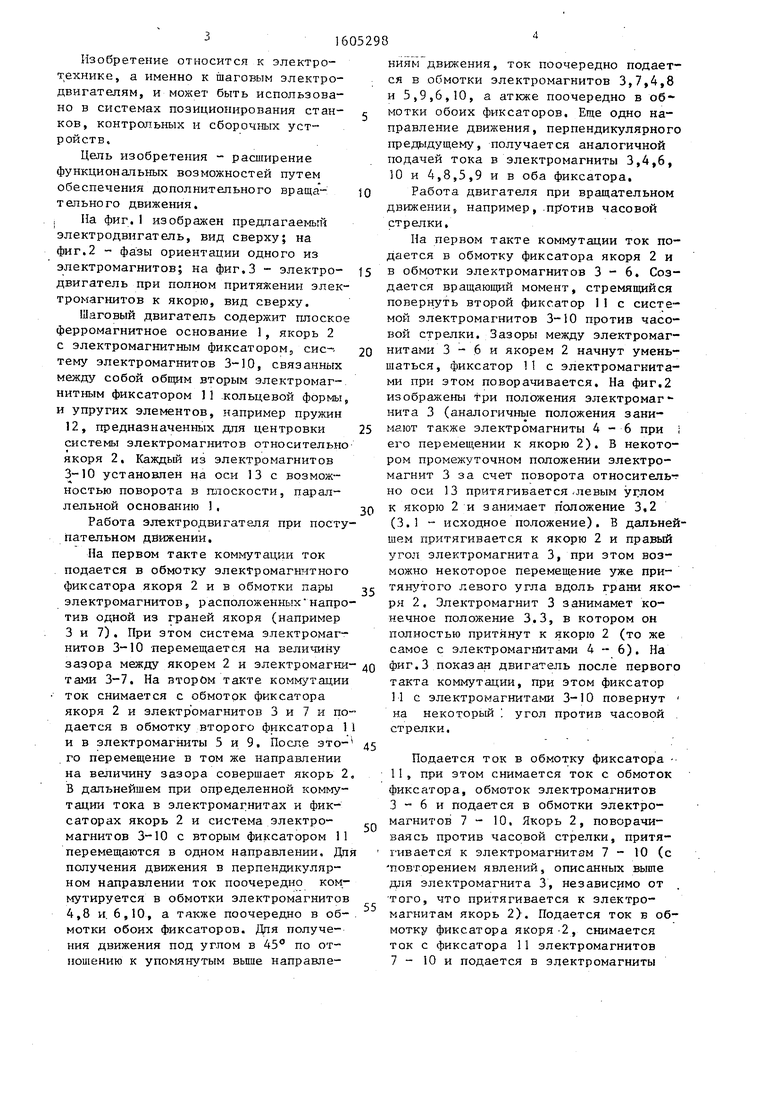
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМАГНИТНЫЙ ЛИНЕЙНЫЙ ДВИГАТЕЛЬ | 1999 |
|
RU2153758C1 |
| ЛИНЕЙНЫЙ ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2002 |
|
RU2222091C1 |
| ЛИНЕЙНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 2000 |
|
RU2168836C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ЛИНЕЙНЫЙ ДВИГАТЕЛЬ | 1999 |
|
RU2149493C1 |
| ЛИНЕЙНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 2000 |
|
RU2166829C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ РЕВЕРСИВНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 2004 |
|
RU2267857C2 |
| Линейный электромагнитный двигатель | 1983 |
|
SU1112500A1 |
| Линейный шаговый электродвигатель | 1979 |
|
SU989698A1 |
| УСТРОЙСТВО ЭЛЕКТРОМАГНИТНОГО ЗАТВОРА | 1993 |
|
RU2103709C1 |
| Вибрационный электродвигатель | 1986 |
|
SU1418861A1 |
Изобретение относится к электротехнике, а именно к шаговым электродвигателям, и может быть использовано в системах позиционирования станков, контрольных и сборочных устройств. Цель - расширение функциональных возможностей за счет обеспечения дополнительного вращательного движения. Двигатель содержит плоское ферромагнитное основание 1, якорь 2 с электромагнитным фиксатором и систему электромагнитов. Электромагниты связаны между собой общим электромагнитным фиксатором 11 кольцевой формы. Упругие элементы 12 предназначены для центровки системы электромагнитов 3 - 10 относительно якоря 2. Каждый из электромагнитов установлен на оси 13 с возможностью поворота в плоскости, параллельной основанию 1. Поочередная коммутация якоря 2, системы электромагнитов 3 - 10 и фиксатора 11 обеспечивает согласованное вращение в направлении часовой стрелки. 3 ил.
J./ /J/Г
/
/
иг.2
Фиг.З
| Многокоординатный шаговый электродвигатель | 1983 |
|
SU1119131A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Шаговый электродвигатель | 1983 |
|
SU1134993A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
