Изобретение относится к электротехнике, к импульсным электродвигателям, и может быть использонано в позиционных устройствах для пере- ещения подвижных элементов по окружности, в манипуляторах, робототехнике.
Цель изобретения расширение эксплуатационных возможностей путем (Q увеличения количества подвижных элеентов.
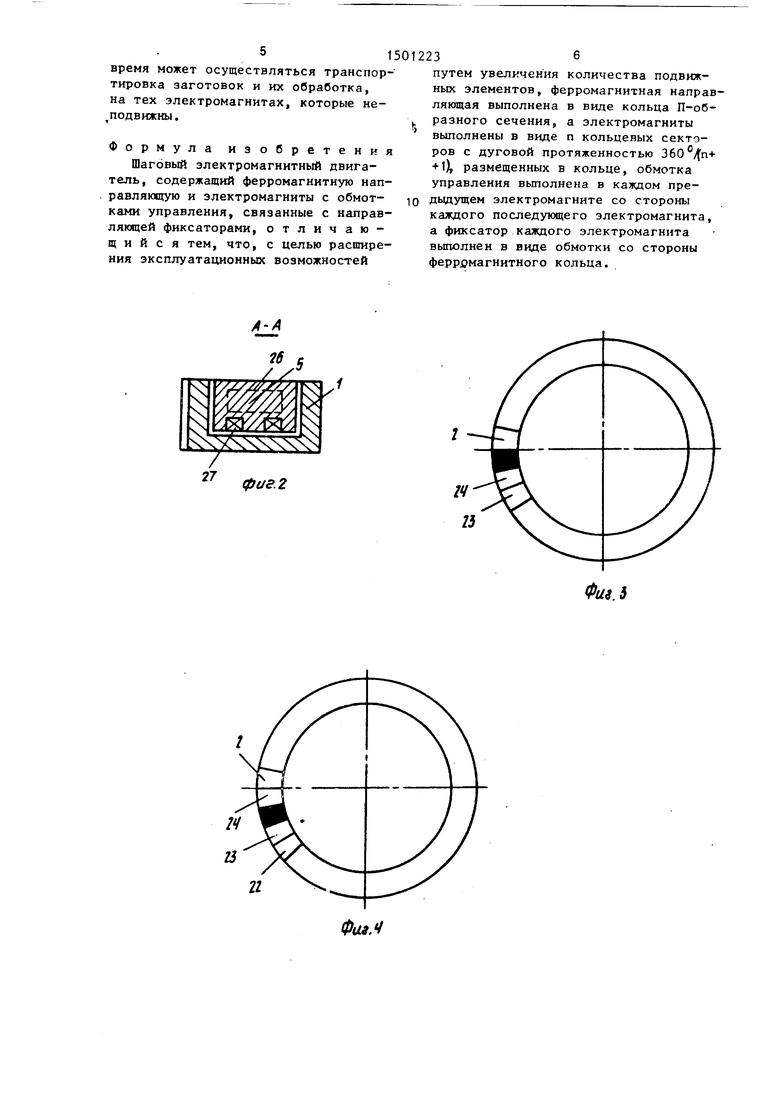
На фиг.1 показано устройство, бщий вид; на фиг.2 - сечение А-А а фиг.1; на фиг.3-6 - этапы отработ-15 и перемещения.
Шаговый электромагнитный двигатель содержит ферромагнитную напавляющую, вытюлненную в виде феромагнитного кольца 1 П-обраэного 20 сечения. Электромагниты 2-24 выполнены в виде п кольцевых секторов с уговой протяженностью 360 ), размещенньк в кольце 1. Таким образом имеется одна пустая ячейка 25. 25 Каждый электромагнит снабжен обмоткой управления 26, выполненной в каждом предыдущем электромагните со-стороны каждого последующего электромагнита, и обмоткой фиксатора 30 27, выполненный на каждом электромагните со стороны ферромагнитного кольца 1.
Двигатель работает следующим образом.35
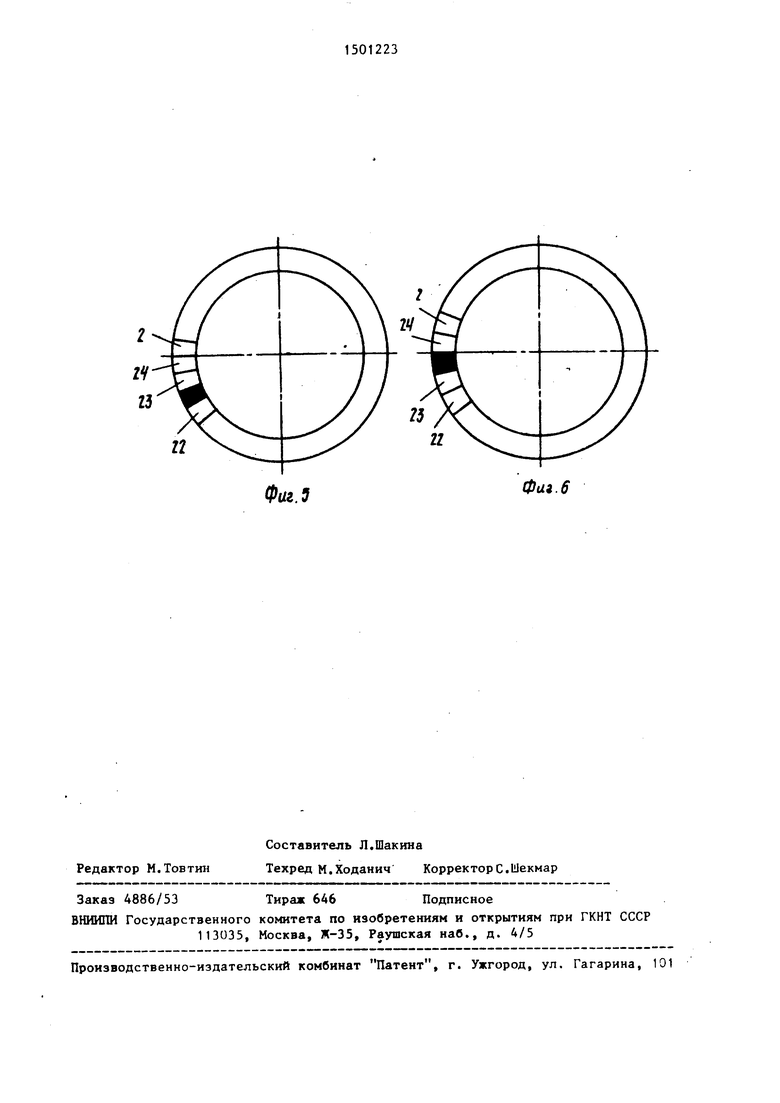
Пусть в исходном состоянии включены все обмотки фиксаторов 27 и все обмотки управления 26, кроме обмотки управления электромагнита 24, а электромагниты занимают положение 0 фиг.З. Если теперь отключить обмотку фиксатора электромагнита 24, обмотку управления электромагнита 23 и включить обмотку управления электромагнита 24, то последний притянется к д электромагниту 2 и электромагниты положение фиг.4. После этого включается обмотка фиксатора электромагнита 24. После указанньк переключений пустая ячейка 25 сместится против хода часовой стрелки на один шаг. Затем отключают обмотку фиксатора электромагнита 23, обмотку управления электромагнита 22 и включают обмотку управления электромагнита 23, а затем обмотку фиксатора этого же электромагнита. Электромагниты займут положение фиг.З, а пустая ячейка 25 вновь сместится против хода часо50
Q
5
0 5 0
5
0
0
вой стрелки еще на один шаг. Если число описанных переключений будет равно числу электромагнитов плюс одно переключение, то пустая ячейка 25 займет исходное положение фиг.6. Однако, все электромагниты при этом совершат последовательное перемещение на один шаг по ходу часовой стрелки, а электромагнит 24 совершит два щага, поскольку ему надо было перейти пустую ячейку 25 и занять место электромагнита 2. Такие циклы переключений можно повторять многократно.
Для изменения направления последовательного движения электромагнитов необходимо для исходного состояния отключить обмотку управления и обмотку фиксатора электромагнита 2 и включить обмотку управления электромагнита 24, тогда электромагнит 2 притянется к электромагниту 24 и займет место пустой ячейки, которая совершит переключение по ходу часовой стрелки на один шаг, и т.д. При этом, когда включены обмотки управления 26 всех электромагнитов, кроме одного соседнего с пустой ячейкой 25, и все обмотки фиксаторов 27, такая цепочка электромагнитов представляет собой единое .целое и жестко сцеплена с ферромагнитной направляющей - кольцом.
Предлагаемый двигатель имеет нес- дчолько подвижных элементов, количество которых может быть определено по желанию пользователя, а не один как в прототипе.
Каждый электромагнит может перемещать обрабатываемую заготовку, количество которых определено числом электромагнитов.
Во время всего цикла переключений Т, которое определяется полным поворотом пустой ячейки, каждый электромагнит неподвижен за исключением интервала времени Т/п, где п - число электромагнитов. Поэтому
Т в течение времени - можно
проводить обработку заготовки с помощью станков и инструментов, которые могут быть размещены вне или внутри ферромагнитной направляющей - кольца.
Перемещение электромагнитов происходит не одновременно, а последовательно, поэтому в одно и то же
время может осуществляться транспортировка заготовок и их обработка, на тех электромагнитах, которые не- подвижны.
Формула изобретения
Шаговый электромагнитный двигатель, содержащий ферромагнитную направляющую и электромагниты с обмотками управления, связанные с направляющей фиксаторами, отличающийся тем, что, с целью расширения эксплуатационньк возможностей
путем увеличения количества подвижных элементов, ферромагнитная направляющая выполнена в виде кольца П-об- разного сечения, а электромагниты выполнены в виде п кольцевых секторов с дуговой протяженностью 360 п+ + размещенных в кольце, обмотка управления вьтолнена в каждом предыдущем электромагните со стороны каждого последующего электромагнита, а фиксатор каждого электромагнита выполнен в виде обмотки со стороны ферромагнитного кольца.
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухкоординатный шаговый электродвигатель | 1987 |
|
SU1501224A1 |
| Линейный шаговый электродвигатель | 1986 |
|
SU1363395A1 |
| Устройство для автоматической передачи по проводам на расстояние показаний метеорологических приборов | 1929 |
|
SU32963A1 |
| Противоугонное устройство транспортного средства | 1987 |
|
SU1516399A2 |
| Способ непрерывной намотки ферромагнитной проволоки на катушки и устройство для его осуществления | 1984 |
|
SU1194531A1 |
| БУКВОПЕЧАТАЮЩИЙ ТЕЛЕГРАФНЫЙ АППАРАТ С ДЕШИФРАТОРОМ ДЛЯ ЗНАКОВ МОРЗЕ | 1926 |
|
SU6809A1 |
| Линейный шаговый электродвигатель | 1984 |
|
SU1188832A1 |
| Электродвигатель | 1991 |
|
SU1836779A3 |
| Устройство для изготовления гиперболоидных контактных узлов Карташева В.В. | 1987 |
|
SU1554058A1 |
| Запорный электромагнитный клапан | 1991 |
|
SU1759237A3 |
Изобретение относится к электротехнике, к импульсным двигателям,и может быть применено в позиционных устройствах для перемещения подвижных элементов по окружности в манипуляторах, робототехнике. Цель состоит в расширении эксплуатационных возможностей путем увеличения количества подвижных элементов. Двигатель содержит ферромагнитную направляющую в виде кольца 1 П-образного сечения, в которой размещены электромагниты в виде п кольцевых секторов 2-24 с угловой протяженностью 360°/п+1. Таким образом, имеется одна пустая ячейка 25. Обмотка управления каждого предыдущего электромагнита выполнена со стороны каждого последующего, а обмотка фиксатора каждого электромагнита выполнена со стороны ферромагнитного кольца 1. В результате переключений обмоток управления и фиксатора электромагнитов пустая ячейка 25 смещается шагами в ту или другую сторону. Каждый электромагнит может перемещать обрабатываемую заготовку. Поскольку перемещение электромагнитов происходит последовательно, одновременно может осуществляться транспортировка заготовок и их обработка на тех электромагнитах, которые неподвижны. 6 ил.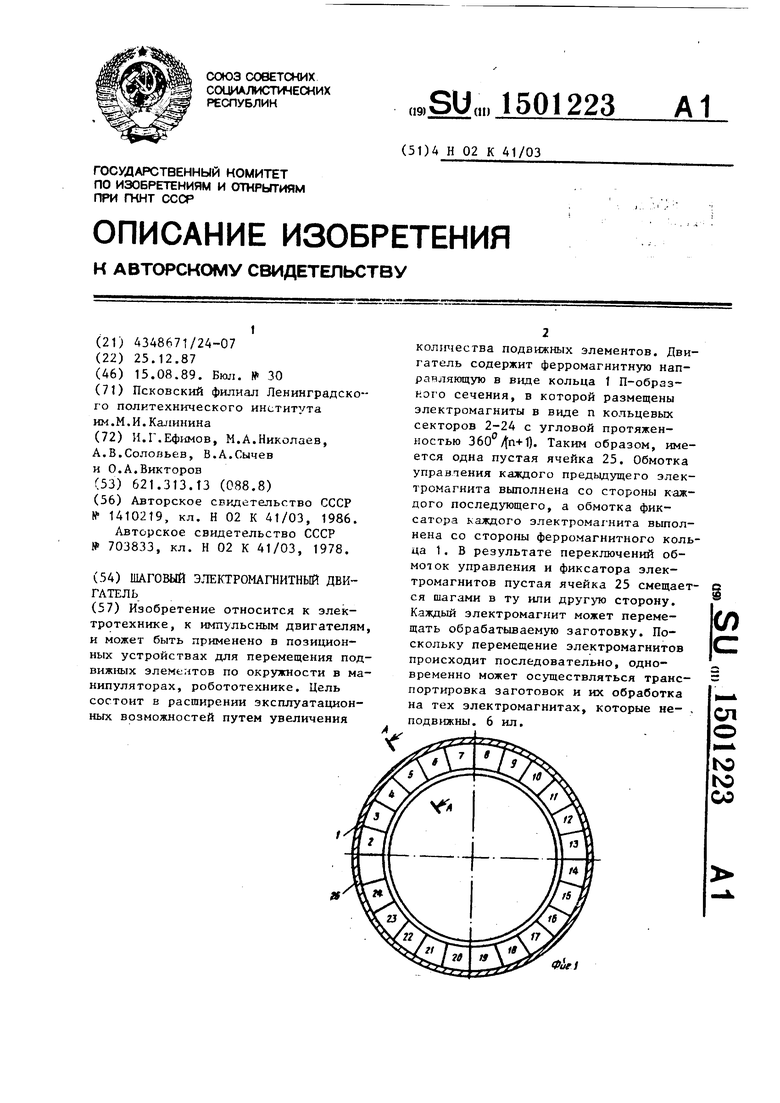
fft/a2
21
Фи.5
гг
Фаг.У
фил. 6
| Многокоординатный шаговый электродвигатель | 1986 |
|
SU1410219A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для суммирования сигналов | 1977 |
|
SU703833A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
