Изобретение относится к устройст- нам, предназначенным для контроля и регулирования работы дробящих и измельчающих машин, и может быть не- пользовано длЛ управления молотковы-- ми дробилками кормов.
Цель изобретения - повышение точности контроля и управления.
На чертеже представлена блок-схе- ма системы контроля и управления дробилкой кормов.
Система состоит из двигателя 1 дробилки с пускателем 2, двигателя 3 выгрузного шнека с пуск-ателем 4, днигателя 5 загрузочного шнека с пускателем 6, двигателя 7 питателя грубых кормов с пускателем 5, двигателя 9 регулятора загрузки дробилки зерном, электромагнитной муфты 10, звуковой сигнализации II, блока 12 управления устройства 13 индикации, устройства 14 ввода команды Пуск, устройства 15 ввода команды Стоп, устройства 16 ввода команд Измельчать зерно и Измельчать грубый корм, датчика 17 загрузки дробилки, датчика J8 темпераутры двигателя- дробилки, датчика 19 состояния двигателя дробилки, датчика 20 состояния двигателя выгрузного шнека, датчика 21 состояния двигателя загрузочного шнека, датчика 22 состояния двигателя пита- , теля Грубых кормов, датчика 23 рабочего состояния дробилки, датчика 24 верхнего уровня зерна в бункере дробилки, датчика 25 нижнего уровня зерна в бункере дробилки, датчика 26 наличия металлических предметов в питателе грубых кормов, датчика 27 верхнего положения регулирующего органа загрузки дробилки зерном.
Система работает следующим образом.
Получив от устройства 14 команду Пуск, блок 12 управления в соответствии с программой управления дробилкой, записанной в его постоянное запоминающее устройство, анализируя
сигнал датчика 23, проверяет готов
ность дробилки к пуску.
При запуске дробилки электромагнитная муфта 10 находится в отключенном состоянии и регулятор загрузки под дейстпием собственной массы находится и крайнем нижнем положении. При этом он полностью перекрывает канал подачи )pнi в дробильную камеру и Ho iAfnii-гпует па датчик 23 рабо
0 5 0 j 0
5
0
.
чего состояния дробилки. Если канал подачи зерна не перекрывает полностью, то дробильная камера может быть засыпана зерном и произвести запуск двигателя дробилки невозможно, В этом случае по сигналу датчика 23 рабочего состояния дробилки блок 12 выдает на устройство 13 индикации сообщение Заклинило регулятор загрузки и возвращается в начало программы.
Если же дробилка готова к пуску, то блок 12 управления включает на заданное время предпусковую звуковую сигнализацию I1 и дает команду включить двигатель 3 выгрузного шнека. Анализируя информацию, поступающую от датчика 20, он проверят привод: включился или нет. Если привод отключен, блок 12 отменяет команду включения двигателя 3, включает звуковую сигнализацию 11, индицирует сообщение Не сработал пускатель выгрузного шнека и возвращается в начало программы. Если двигатель 3 включен, то блок 12 по сигналам датчиков 24 и 25 уровня зерна в бункере дробилки включает и отключает двигатель 5 загрузочного шнека.
Затем блок 12 дает команду включить электродвигатель 1 дробильного барабана по схеме звезда и с помощью датчика I7 загрузки дробилки контролирует ток, потребляемый электродвигателем 1, Если ток равен нулю, то блок 12 дает команду на отключение всех двигателей, включает зву15овую сигнализацию 11, индицирует сообщение Не сработал пускатель привода дробильного барабана и возвращается в начало., программы. Если двигатель 1 потребляет ток, то блок 12 начинает отсчитывать время пуска двигателя по схеме звезда, проверяет информацию, поступающую от датчика 18 температуры двигателя, и измеряет ток, потребляемый двигателем 1,
Если с начала пуска прошло заданное время и ток, потребляемый двигателем 1, не начал уменьшаться, то блок 12 дает команду на отключение всех двигателей, включает звуковой сигнал, выдает сообщение Затяжной пуск и переходит в начало программы.
Если датчик 18 температуры сообщает блоку 12, что температура обмотки двигателя 1 превысила допустимую, то блок 12 немедленно дает команду
51
на отключение псех двигателей, выдает сообщение Перег рев двигателя привода дробильного барабана, включает звуковой сигнал и возвращается в на- чало программы.
Если ток, потребляемый двигателем 1, начал уменьшаться до истечения заданного времени и двигатель за время пуска по схеме звезда не пе- регрелся, то блок 12 дает команду на отключение схемы звезда и по сигналу датчика 19 проверяет выполнение этой команды. Если двигатель 1 не отключился, блок 12 дает команду на отключение всех двигателей, включает звуковой сигнал, выдает сообщение Не сработал пускатель привода дробильного барабана и возвращается в начало программы. Если двигатель I отключается, блок 12 дает команду на включение двигателя I по схеме треугольник и, анализируя сигнал датчика 19, проверяет выполнение этой команды. Если команда не выполнена, то блок 12 выполняет то же, что и при невыполнении команды на отключение схемы звезда.
Если команда на включение п.о схеме треугольник выполнена, блок 12 ждет, пока двигатель I разгонится до номинальной скорости. Во время этого ожидания и всех пocлeдyюpy x временных задержек блок 12 анализирует ин- формадию, поступающую от датчиков 19 и 20 и датчика 18 температуры двигателя I дробильного барабана. Если двигатель 1 дробильного барабана или двигатель 3 выгрузного шнека отключен или если двигатель 1 дробильного барабана перегрет, то блок 12 дает команду на отключение всех двигателей, включает звуковой сигнал, выдает соответствующее информационное сообщение и возвращается в начало .про- граммы.
Если датчики сигнализируют о нормальной работе дробилки и заданное время прошло,то блок 12 анализирует информацию, поступающую из устройст- ва 16 ввода команд Измельчать зерно и Измельчать грубый корм. Если нужно измельчать зерно, блок 12 дает команду на включение электромагнитной муфты 10 привода регулятора за- грузки и на включение двигателя 9 привода регулятора загрузки, ожидает время, достаточное для предварительного приоткрьшания канала подачи зер6 .6 .
на из бункера дробилки в дробильную камеру, отключает двигатель 9 и дает команду на включение торможения двигателя 9,Торможение двигателя не позволяет регулятору загрузки опускаться под действием собственной массы, а удерживает его в приоткрытом состоянии. Через заданное время, достаточное для окончания переходных процессов, вызванных изменением загрузки дробилки, блок 12 с помощью датчика 17 загрузки определяет загрузку дробилки и сравнивает ее с заданным оптимальным значением.
Если загрузка дробилки равна оптимальной, то блок 12 вьисидает заданное время, анализируя информацию, поступающую от датчиков 19 и 20, датчика 18 температуры, датчика 23 рабочего состояния дробилки, датчика 27 верхнего положения регулятора загрузки и датчиков 24 и 25 уровня зерна в бункере дробилки, затем возвращается на очередное определение загрузки дробилки.
Если загрузка дробилки меньше оптимальной, то блок 12 оценивает величину отклонения загрузки от оптимальной и задает время открывания регулирующего органа в зависимости от величины отклонения, Чем больше от- клонение загрузки от оптимальной, тем больше время открывания регулирующего органа загрузки. Затем с блока I2 снимается команда торможения двигателя 9 и дается команда двигателю 9 на открьгоание регулирующего органа загрузки на протяжении заданного времени. После этого блок 12 ожидает заданное время, достаточное для окончания переходных процессов, вызванных изменением загрузки дробилки.
Затем блок 12 возвращается на определение загрузки дробилки. Если загрузка дробилки больше оптимальной, то блок 12 проверяет, не превышает ли загрузка заданную максимальную величину. Если превышает, то блок 12 проверяет, не была ли это кратковременная нагрузка. Для этого через определенный интервал времени загрузка робилки .определяется повторно и, если она снова превышает заданную максимальную величину, то блок 12 проверяет вид перегрузки: технологическая или аварийная. Для этого он дает коанду на отключение электромагнитной
муфты 10 н проверяет по датчику 23, перекрьш ли регулирующий орган загрузки подачу зерна в дробилку. Если не перекрьш, т.о блок 12 дает команду на отключение всех приводов, включает звуковую сигнализацию, выдает сообщение Заклинило регулирующий орган загрузки и переходит в начало программы. Если регулирующий орган за- грузки перекрьш подачу зерна в дробилку, то блок 12 дает возможность дробилке поработать без подачи зерна и повторно определяет загрузку Если загрузка все еще превышает заданную максимальную величину, то дается команда на отключение всех приводов, включается звуковой сигнал, выдается сообщение Заклинило привод дробильного барабана и блок 12 возвращает- ся в начало программы.
Если загрузка уменьшилась, то перегрузка была технологической, и блок 12 переходит на включение электромагнитной муфты и предварительное приоткрывание заслонки.
Если загрузка дробилки больше оптимальной, но не превьшает заданную максимальную величину, то определяется величина отклонения загрузки от оптимальной и задается время закрьша ния регулирующего органа в зависимости от величины отклонения. Чем больше отклонение загрузки от. оптимальной, тем больше время закрывания ре- гулирующего органа загрузки, тем на большую величину уменьшается подача зерна в дробильную камеру. По истечении заданного времени блок 12 переходит на очередное определение за- грузки дробилки, если все датчики информируют о нормальной работе.
Если датчик 25 сигнализирует о . том, что нужно загрузить зерно в бункер дробилки, блок I2 дает команду на включение загрузочного шнека, проверяет ее выполнение и ждет сигнала датчика 24 о том, что бункер загру- .жен. Получив такой сигнал, блок 12 дает команду на отключение загрузоч ного шнека и проверяет ее выполнение Затем переходит на контроль информации от других датчиков. Если датчик 27 информирует, что регулирующий орган загрузки полностью открыт, нахо- дится в самом верхнем положении, то блок 12 -проверяет, подается ли зерно из бункера в дробильную камеру. Для этого блок 12 определяет загрузку
дробилки. Если загрузка больше оптимальной, то блок 12 переходит на проверку, не превышает ли она заданную 1аксимально допустимую. Если загрузк меньше оптимальной,,то блок 12 сравнивает ее с загрузкой холостого хода Если загрузка не превышает загрузку холостого хода, то блок 12 дает команду на отключение всех приводов, включает звуковую сигнализацию и выдает сообщение Нет зерна. Если же загрузка болыае загрузки холостого хода, то анализируется информация из других датчиков.
Если датчик 23 рабочего состояния дробилки-показьшает, что дробилка находится в нерабочем состоянии, т,е регулятор загрузки полиостью перекрывает подачу зерна в дробильную камеру, то блок 12 проверяет износ молотков дробильного барабана и исправность привода регулятора загрузки. Для этого блок 12 измеряет загрузку дробилки. Если загрузка близка к загрузке холостого хода, то блок 12 переходит на проверку исправности двигателя питателя, а если загрузка дробилки больше загрузки холостого хода, то блок 12 ждет за данное время Чтобы дробилка поработала без подачи зерна в дробильную камеру, затем пов торно измеряет загрузку дробилки и определяет разность между первым и вторым значениями загрузки дробилки, Если эта разность больше заданного значеиия, то блок 12 переходив на включение муфты 10 и предварительное приоткрывание регулирующего органа загрузки, а если эта разность меньше заданного значения, то блок 12 включает звуковой сигнал, выдает сообщение Изношены молотки и переходит на подпрограмму отключения дробилки.
Для проверки исправности привода регулятора загрузки блок 12 дает команду на включение электромагиитной муфты 10 и предварительное приоткрывание регулирующего оргайа загрузки. Затем блок 12 анализирует сигнал датчика 23, Если датчик 23 сигнализирует, что регулирующий орган загрузки приоткрыл канал подачи зерна в дроI
билку, то блок 12 переходит на ожидание окончания переходных процессов -Если регулирующий орган загруэки продолжает полиостью перекрывать канал подачи зериа, то блок 12 включает звуковой сигнал, выдает сообщение
915
Неисправен привод регулятора загрузки и переходит на подпрограмму отключения дробилки.
Если дробилка работает нормально, то блок 12 периодически измеряет загрузку дробилки и с помощью регулятора загрузки поддерживает оптимальную загрузку.
Для отключения дробилки необходим с помощью устройства 15 на вход блока 12 подать сигнал Стоп. В этом случае блок I2 переходит на подпрограмму обработки прерывания, которая является подпрограммой отключения дробилки. При выполнении этой подпрограммы блок i 2 вначале проверят сигналы датчиков 18 и 20. Если двигатель дробильного барабана или двигатель 3 выгрузного шнека отключец, то блок 12 дает команду на отключение всех двигателей и переходит в начало программы. Если же двигатели включены, то блок 12 дает команду на отключение электромагнитной муфты 10 и двигате- ля 7 питателя грубых -кормов. После того, как выгрузной шнек выгрузит весь продукт, блок 12 дает команду на отключение всех двигателей дробилки и возвращается в начало програм- мы.
Если после включения дробилки или во время ее работы на выходе устройства 16 сформирована команда Измельчать грубый корм, блок 12 дает ко- манду отключить регулятор загрузки дробилки зерном, анализируя информацию от датчика 23, проверяет выполнение этой команды и переходит на программу управления измельчением грубых кормов. В соответствии с этой программой блок 12 дает команду иа включение зтой команды по сигналам датчика 22 состояния привода питания грубых кормов. Если питатель не вклю- чился, то блок 12 включает звуковой сигнал, выдает информационное сообщение Не сработал пускатель питателя грубых кормов и заданное время ожидает действий оператора. Оператор может вручную управлять подачей грубых кормов в дробилку или отключить дробилку и установить неисправность. Если данное время прошло, а ont-parop не предпринял никаких действий, то блок 12 переходит на подпрограмму отключения дробилки.
- Если же пи1ате.чь г рубых кормов включен, ТС1 блок 12 с помощью датчи06) О
ка 17 определяет тагрутку дроГшлки и сравнивает се с заданной. bicjiH загрузка дробилки не превышает заданную, то блок 12 на протяжении зад И- ного времени проверяет сигналы датчиков 19, 20 и 22, датчика 18 температуры двигателя 1 и датчика 26 наличия металлических предметов. Если от датчика 26 поступает сообщение о попадании металлических предметов в питатель грубых кормов, блок 12 отключает двигатель 7 питателя грубых кормов, включает звуковой ги нал, цирует сообщение В питателе грубых кормов металлический предмет и начинает контролировать датчик 22 состсзя ния привода питателя. В этом случае оператор должен вручную включить реверс пи1ателя грубых кормов, извлечь металлический предмет из питателя и вручную включить привод питателя. В результате этого датчик 22 состояния привода питателя выдает сигнал, что двигатель 7 включен. Получлп этот сигнал, блок 12 переходит на измерение загрузки дробилки.
Если загрузка дробилки превышает заданную, то блок 12 проверяет, не превышает ли загрузка предельно допустимую. Если 1ет, то контроллер дает команду на отключение двигателя 24 питателя, на протяжении некоторого времени проверяет сигнал датчиков 19, 20, 22, 18 и 27, а затем включает питатель и возвращается в начало алгоритма управления измельчением грубых кормов.
Если загрузка дробилки превышает предельно допустимую, то блок 12 проверяет, не кратковременный ли это вплеск нагрузки. Для этого, отключив двигатель 7 питателя, через определенное время повторно измеряет за-- грузку дробилки. Если нагрузка все еще превышает предельно допустимую, то блок 12, не включая двигателя 7 питателя, дает возможность поработать дробилке время, за которое она должна выгрузить большую часть продукта из камеры, и опять проверяет загрузку. Если загрузка уменьшилась незначительно, то блок 12 отключает все приводы дробилки, включает звуковой сигнал, на индикаторы выдает сообщение Перегрузка двигателя привода дробильного 6apao, и переходит в начало программы, l- cju же загрузка значительно умоп.шп.-ып,, то блок 12
гк реходит в начало программы управления измельчением грубых кормов.
Отключение дробилки выполняется так же, как и при измельчеини зерна.
Использование блока 12 управления в системе управления позволит повысить иадежиость системы управления, технологичность ее изготовления и
чик иерхнего положения регулирующего органа загрузки дробилки, датчик наличия металлических предметов в питателе и датчик верхнего и нижнего ровней зерна в бункере дробилки, ре- J улятор загрузки, пускатели двигателя дробилки, двигателей выгрузного и загрузочного шнеков, двигателя пи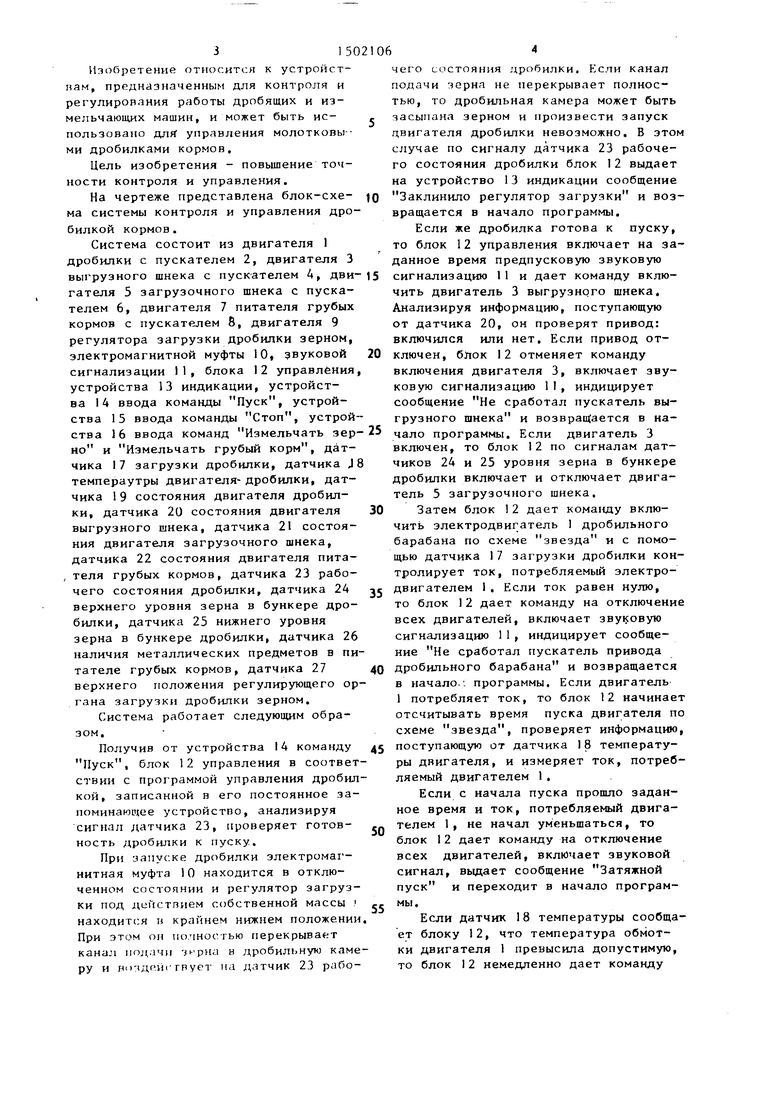
| название | год | авторы | номер документа |
|---|---|---|---|
| КОРМОЦЕХ ДЛЯ ПРИГОТОВЛЕНИЯ РАССЫПНЫХ КОРМОСМЕСЕЙ | 1995 |
|
RU2088127C1 |
| МАЛОГАБАРИТНАЯ КОМБИКОРМОВАЯ УСТАНОВКА | 2004 |
|
RU2275156C2 |
| ПРИЦЕПНАЯ УСТАНОВКА ДЛЯ ПРИГОТОВЛЕНИЯ КОМБИКОРМОВ И КОРМОВЫХ СМЕСЕЙ | 2012 |
|
RU2492775C1 |
| Способ и устройство для получения корма | 1978 |
|
SU973101A1 |
| Система управления загрузкой бункера молотковой дробилки | 1985 |
|
SU1281302A1 |
| АГРЕГАТ КОМБИКОРМОВЫЙ МОБИЛЬНЫЙ АКМ-3М | 2012 |
|
RU2500096C1 |
| МАЛОГАБАРИТНАЯ КОМБИКОРМОВАЯ УСТАНОВКА | 2007 |
|
RU2338441C1 |
| Линия производства лечебных кормов | 2018 |
|
RU2680272C1 |
| РАЗМОЛЬНО-СМЕСИТЕЛЬНЫЙ БЛОК | 2002 |
|
RU2214139C1 |
| ДВУХСТУПЕНЧАТЫЙ ИЗМЕЛЬЧИТЕЛЬ КОРМОВ | 2000 |
|
RU2193839C2 |
Изобретение относится к контролю и управлению дробящих и измельчающих машин. Может быть использовано в строительной, горнорудной и других отраслях промышленности. Позволяет повысить точность контроля и управления. Содержит двигатель 1 дробилки, двигатели выгрузочного 3 и зазгрузочного 5 шнеков, двигатель 7 питателя, двигатель 9 регулятора загрузки, блок 12 управления, устройство 13 индикации, устройство 14 ввода команды "Пуск", устройство 15 ввода команды "Стоп", устройство 16 ввода команды "Измельчать зерно и измельчать грубый корм", датчик 17 загрузки дробилки, датчик 18 температуры двигателя дробилки, датчик 19 состояния двигателя дробилки, датчик 20 состояния двигателя выгрузного шнека, датчик 21 состояния двигателя загрузочного шнека, датчик 22 состояния двигателя питателя, датчик 23 рабочего состояния дробилки, датчики 24 и 25 нижнего и верхнего уровней зерна в бункере дробилки, датчик 26 наличия металлических предметов в питателе, датчик 27 верхнего положения регулирующего органа загрузки. 1 ил.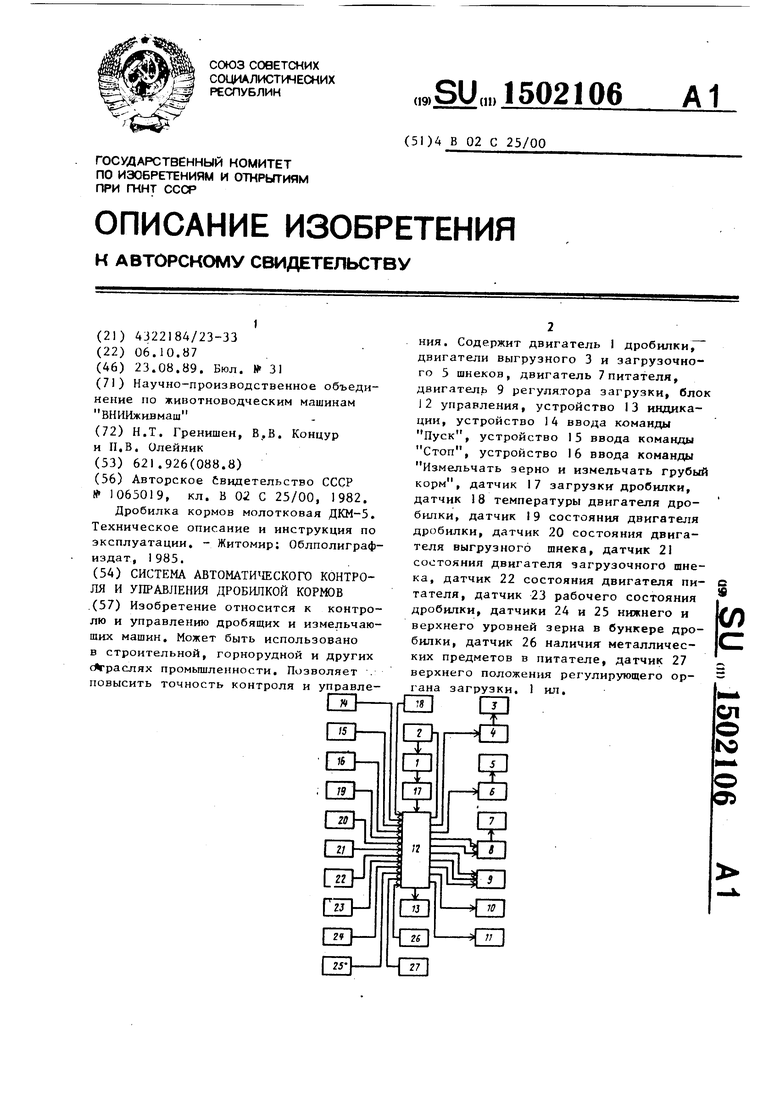
гибкость управления. Система управле- JQ тателя и устройство индикации, о тния значительно уменьшает затраты труда на устранение неисправности и восстановление работоспособности дробилки. Кроме того, система управлений обеспечивает контроль готовнос- ти дробилки к пуску, контроль рабочего состояния дробилки, контроль подачи зерна в дробнпьнуИ камеру и контроль износа молотков.
Формула изобретен-и я
Система автоматического контроля и управления дробилкой кормов, включающая блок управления, к одним соот- 25 ветствующими входами блока управлеветствующим входам которого подключены устройства ввода команд Пуск и Стоп, устройство ввода команды Измельчать зерно и измельчать грубый
корм.
датчик загрузки дробилки, дат- ЗО ного шнеков и двигателя питателя.
Составитель В, Алекперов Редактор В. Петраш Техред М.Дидык Корректор С, Черни
Заказ ч998/9
Тираж 543
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Ра-ушская наб., д. 4/5
цеX
личающаяся тем, что, с лью повышения точности контроля и управления, она снабжена датчиком температуры двигателя привода дробилки, датчиком рабочего состояния дробилки и датчиками состояния двигателя дробилки, двигателей выгрузного и загрузочного шнеков и двигателя питателя, причем датчик температуры двигателя привода дробилки, датчик рабочего состояния дробилки и датчики состояния двигателей дробилки выгрузного и загрузочного шнеков и двигателя питателя соединены с другими соотния, выходы Которого соединены с регулятором загрузки, устройством индикации и пускателями двигателя дробилки, двигателей выгрузного и загрузочПодписное
| Система автоматического регулирования загрузки дробилки | 1982 |
|
SU1065019A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| - Житомир: Облполиграф- издат, 1985. | |||
