Изобретение относится к измерительной технике и может быть применено в системах измерения и контроля параметров перемещения контролируемого объекта о
Цель изобретения - повышение помехоустойчивости и точности измерения линейных перемещений.
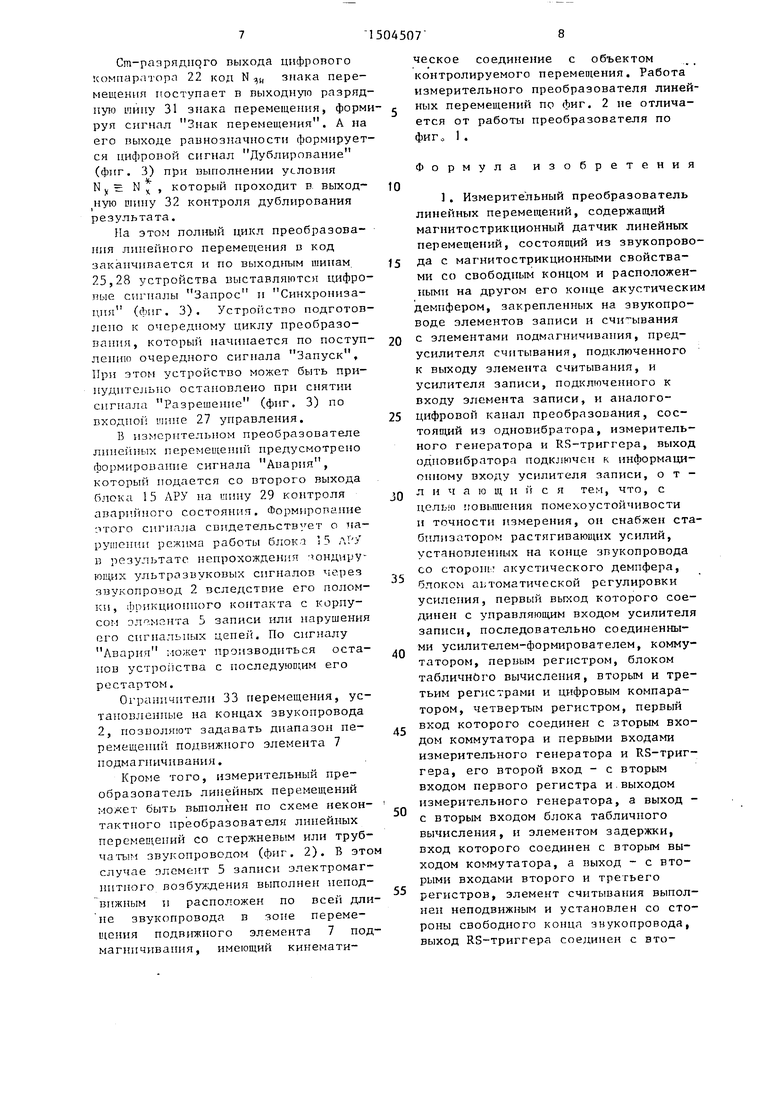
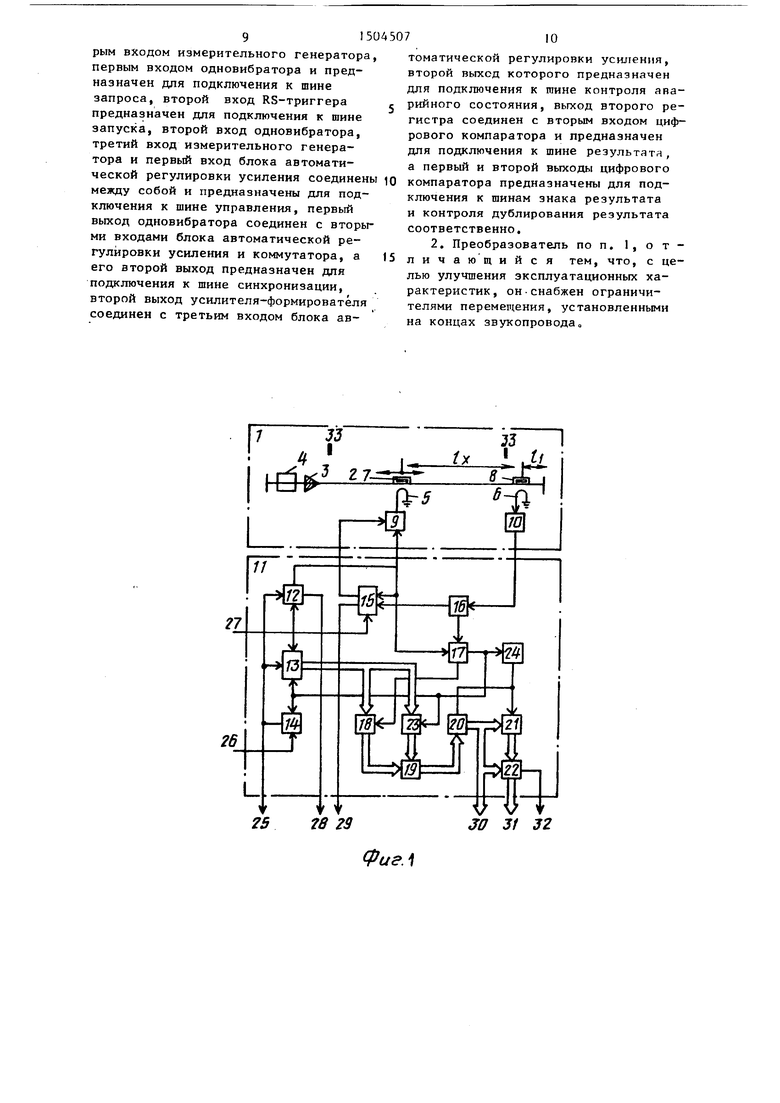
На фиг. 1 приведена схема измерительного преобразователя линейных перемещений со струнным магнито- стрикционным датчиком линейных перемещений; на фиг. 2 - схема измерительного преобразователя линейных перемещений, выполненного по неконтактной схеме; на фиг. 3 - временная диаграмма, поясняющая работу измерительного преобразователя.
Измерительный преобразователь линейных перемещений содержит магнито- стрикционный датчик 1 линейных перемещений, состоящий из звукопровода 2 с магнитострикционными свойствами со свободным концом, акустического демпфера 3 и стабилизатора 4 растягивающих усилий, расположенных на другом конце звукопровода 2, закрепленных на звуковопророде 2 элементов 5 и 6 записи и считывания с элементами 7 и 8 подмагничивания, усилителя 9 записи, подключенного по входу элемента 5 записи, предС71
О 4 СП
315
усилителя 10, подключенного к выходу элемента 6 считьшания, и аналого- цифровой канал 11 преобразования, состоящий из одновибратора 12, измерительного генератора 13, RS-триг- гера 1А, выход одновибратора 12 подключен к-информационному усилителю 9 записи, блока 15 автоматической регулировки усиления (АРУ), первый вход которого соединен с управляющим входом усилителя 9 записи, последовательно соединенных усилителя- формирователя 16, коммутатора 17, регистра 18, блока 19 табличного вы- числения, регистров 20 и 21 и цифрового компаратора 22, регистра 23, первый вход которого соединен со вторым входом коммутатора 17 и первыми входами измерительного генератора 13 и RS-триггера 14, его второй вход - со вторым входом регистра 18 и выходом измерительного генератора 13, а выход - со вторым входом блока 19 табличного вычисления и элемента 24 задер.жки, вход которого соединен со вторым выходом компаратора 17, а выход - со вторыми входами регистров 20 и 21, выход RS-триггера 14 соединен со вторым входом измери- тельного генератора 13, первым вхо- дом одиовибратора 12 и выходной шиной 25 запроса, второй вход RS-триг-- гера 1А соединен с шиной 26 запуска, второй вход одновибратора 2, третий вход измерительного генератора 13 и первый вход блока 15 АРУ соединены с шиной 27 управления, первый выход одновибратора 12 соединен со вторыми входами блока 15 АРУ и коммутатора 17, а его второй выход с шиной 28 синхронизации, второй выход усилителя-формирователя 16 соединен с третьим входом блока 15 АРУ, второй выход которого соединен с шиной 29 контроля аварийного состояния, выход регистра 20 соединен с шиной 30 результата и вторым входом цифрового компаратора 22, первый и второй выходы которого соединены с шинами 31 и 32 знака результата и контроля дублирования результата соответственно„ На концах зву- копровода 2 установлены ограничители 33 перемещения,
Измерительный преобразователь линейных перемещений работает следующим образом.
д 5 0 5 0 с Q с
0
Устройство переводится в режим работы По цифровому сигналу Разрешение, поступающему по входной шине 27 управления. По этому сигналу производится разблокирование входов одновибратора 12, блока 15 АРУ и измерительного генератора 13 аналого- цифрового канала 11 преобразователя устройства (фиг. 1). Блок 15 АРУ вырабатывает сигнал Начальная установка,, с помощью которого производится принудительная установка в исходное состояние некомбинационных элементов 14,17,18,20,21,23,24 устройства. На управляющем выходе блока 13 АРУ формируется сигнал управления Uynp UUu/2, задающий размерность токового сигнала записи на выходе управляемого усилителя 9 записи, установленного в корпусе маг- нитострикционного датчика 1 линейных перемещений,,
Перевод RS-триггера 14 в исходное (нулевое) состояние инициирует выставление по выходной шине 25 запроса цифрового сигнала Запрос (фиг. 3). В ответ на выставленный сигнал Запрос по входной шине 26 запуска подается цифровой импульс- ш,1Й сигнал Запуск (фиг. 4д). Производится переключение RS-триггера 14 в единичное состояние: по шине 25 снимается сигнал Запрос, запускается одновибратор 12 и измерительный генератор 13, выполненный по схеме цифрового развертывающего генератора кодов (на фиг. 1 не показано) .
Одновибратор 12 по первому выходу формирует цифровой импульсный сигнал опроса,который может быть промодулирован высокой частотой. Запускаются блок 15 АРУ и управляемый усилитель 9 записи. На его выходе формируется токовый видеоимпульс записи соответствующей амплитуды, который проходит в элемент 5 записи электромагнитного возбуждения..При прохождении токового сигнала записи через активную среду элемента 5 записи с элементом 7 подмагничивания, расположенным на звукопроводе 2, на искомом расстоянии 1х от неподвижного элемента 6 считывания элементом 8 подмагничивания под ним в эву- копроводе 2 возбуждается ультразвуковая волна механической деформации.
10
15
20
25
Эта волна, распространяясь влево (по фиг. 1), в некоторый момент достигает акустический демпфер 3 и рассеивает на нем свою энергию. Использование демпфера 3 позволяет исключить образование в звукопроводе датчика информационных механических волн отражения Подключение звуко- провода 2 к стабилизатору 4 растягивающих усилий через акустический демпфер 3 обеспечивает стабилизацию механического напряжения вдоль зву- копровода 2 при работе преобразователя о Одновременно ультразвуковая волна механической деформации распространяется по звукопроводу 2 вправо (по фиг. 1) и через искомое время: Т( , где V -скорость волны, достигает неподвижно установленного на расстоянии 1 от свободного конца звукопропода элемента 6 считывания. Проходя под ним, механическая волна наводит на его выходе импульс напряжения считывания.
Наведенный сигнал считывания с выхода элемента 6 проходит через предусилитель 10 считывания с ограниченной полосой пропускания, установленный в корпусе магнитострикци- онного датчика 1 линейных перемеще- ний, на вход усилителя-формирователя 16, На его втором выходе формируется при этом цифровой импульсный сигнал, по которому в регистр 18 записывается код временного интервала Т( линейного перемещения N f Т, где f - частота дискретизации измерительного генератора 13. Производится переключение коммутатора 1 7 в режим Вход - выход 2.
В следующий момент времени Т, механическая волна проходит по звукопроводу 2 датчика дальше, минуя элемент 6 считывания, отражается от его свободного конца, изменяет направление своего движения и вторично достигает элемента 6 счи- тывания. На его выходе наводится импульс напряжения считывания , который JQ последовательно усиливается пред- усилителем 10 и усилителем-формирователем 16 В результате на первом выходе усилителя-формирователя 16 будет сформирован аналоговый сигнал считывания.
На втором выходе усилителя-формирователя 16 формируется цифровой импульсный сигнал, по которому про30
35
45
55
40
изводится запить выставленного текущего кода N; измерительного генератора 14 во второй регистр 23: N f( Т). Производится переключение коммутатора 17 в исходный режим Вход - выход 1, а также ос- . танов измерительного генератора 13 и переключение в исходное (нулевое) состояние RS-триггер 14.
В следующий момент коды N,, N2 интервалов Т, Т линейных положений с разрядных выходов регистров 18,23 проходят на входы блока 19 табличного вычисления. Производится табличное вычисление кода разностного интервала дТ Т - Т 21,/V,
UN f ЛТ f 21,/V, (6)
20
и результирующего ремещения
кода линейного пе
м - к 2-1 к Д N f . 2- 1, /V
К Ь
21 (7)
0
5
где К - нормирующий элемент.
Вычисленный результирующий код N через интервал времени, больший времени распространения информационных сигналов через электрические цепи элементов 19,23 устройства, по цифровому импульсному сигналу элемента 24 задержки заносится в регистр 20: Ny N5, а код предыдущего преобразования с выходов этого регистра 20 переписывается в регистр
21
1
N,
N
к
Код N)c текущего преобразования с -разрядного выхода регистра 20 проходит в выходную разрядную шину 30 результата, формируя сигнал Код перемещения, и поступает на один из входов цифрового компаратора 22о На его другой вход поступает п-разряд- ный код N предьщущего преобразования с выхода регистра 21. Цифровой компаратор 22 выполняет текущий анализ кодов смежных вычислений линейного перемещения на равнозначность с формированием кода знака перемещения
JQ
55
ЭМ
}Н
(8)
JH
Ст-раэрпдиого выхода цифрового компаратора 22 код N , знака перемещения поступает в выходнуто разрядную шину 31 знака перемещення, форм рун сигнал Знак перемещения. А на его выходе равнозначности формируется цифровой сигнал Дублирование (фиг, 3) при выполнении условия Ny N , , который проходит в. выход- ную шину 32 контроля дублирования результата.
На этом полный цикл преобразования линейного перемеи1.ения в код заканчивается и по выходным шинам 25,28 устройства выставляттси цифровые сигналы Запрос и Синхронизация (фиг. 3), Устройство подготовлено к очередному циклу преобразования, который начинается по поступ лению очередного сигнала Запуск, При этом устройство может быть при- нудителы о остановлено при снятии сигнала Разрешение (фиг, 3) по входно тине 27 управления,
В измерительном преобразователе линейных перемещений предусмотрено формирование сигнала Авария, который подается со второго выхода блока 15 АРУ на шину 29 контроля аварийного состояьшл. Формирование этого сигнала свидетельствует о нарушении режима работы блока 15 ЛРУ в результате непрохождения онднру- ющих ультразвуковых сигналов через звукопровод 2 вследствие его поломки, фрикционного контакта с корпусом эл.мента 5 записи или нарушения его сигнальных цене. По сигналу Авария может производиться оста- нов устройства с последуюсщм его рестартом.
Ограничители 33 перемещения, установленные на концах звукопровода 2, позволяют задавать диапазон не- ремещений подвижного элемента 7 подмагничивания.
Кроме того, измерительный преобразователь линейных перемещений может быть вьшолнен по схеме некой- тактного преобразователи линейных перемещений со стержневым или трубчатым звукопроводом (фиг, 2), В это случае элемент 5 записи электромаг- 1П1ТПОГО возбуяэдения выполнен неподвижным и расположен по всей длине звукопровода в зоне перемещения подв}гжного элемента 7 подмагничивания, имеющий кинемати
с ю
5 0 5
g Q
5
0
5
ческое соединение с объектом контролируемого перемещения. Работа измерительного преобразователя линейных перемещений по Лиг, 2 не отличается от работы преобразователя по фиг о 1.
Формула изобретения
, Измерительный преобразователь линейных перемещений, содержащий магнитострикционный датчик линейных перемещений, состоящий из звукопровода с магнитострикционными свойствами со свободным концом и расположенными на другом его конце акустическим демнфером, закрепленных на звукопро- воде элементов записи и счи ывания с элементами подмагничивания, пред- усилителя считывания, подключенного к выходу элемента считывания, и усилителя записи, подключенного к входу элемента записи, и аналого- цифровой канал преобразования, сос- тоящдй из одновибратора, измерительного генератора и RS-триггера, выход одновибратора подключен к информационному входу усилителя записи, о т - л и ч а ю щ и и с я тем, что, с целью овьщ1ения помехоустойчивости и точности измерения, он снабжен стабилизатором растягивающих усилий, установленных на конце звукопровода со сторонь акустического демпфера, блоком автоматической регулировки усиления, первый выход которого соединен с управляющим входом усилителя записи, последовательно соединенными усилителем-формирователем, коммутатором, первым регистром, блоком табличнЬго вычисления, вторым и третьим регистрами и цифровым компаратором, четвертым регистром, первый вход которого соединен с вторым входом коммутатора и первыми входами измерительного генератора и RS-триггера, его второй вход - с вторым входом первого регистра и выходом измерительного генератора, а выход - с вторым входом блока табличного вычисления, и элементом задержки, вход которого соединен с вторым выходом коммутатора, а выход - с вторыми входами второго и третьего регистров, элемент считывания выполнен неподвижным и установлен со стороны свободного конца эвукопровода, выход RS-триггера соединен с вто91504507
рым входом измерительного генератора, первым входом одновибратора и предназначен для подключения к шине запроса, второй вход RS-триггера предназначен для подключения к шине запуска, второй вход одновибратора, третий вход измерительного генератора и первый вход блока автомати10
томатической регулировки усиления, второй выход которого предназначен для подключения к гаине контроля ава рийного состояния, выход второго ре гистра соединен с вторым входом ци рового компаратора и предназначен для подключения к шине результата.
а первый и второй выходы цифрового ческой регулировки усиления соединены ю компаратора предназначены для под- между собой и предназначены для подключения к шине управления, первый выход одновибратора соединен с вторы ми входами блока автоматической регулировки усиления и коммутатора, а 15
его второй выход предназначен дпя подключения к шиНе синхронизации, второй выход усилителя-формирователя соединен с третьим входом блока авключения к шинам знака результата и контроля дублирования результата соответственно,
2. Преобразователь по п. 1, о т личающийся тем, что, с ц лью улучшения эксплуатационных характеристик, он-снабжен ограничителями перемещения, установленными на концах звукопроводао
10
томатической регулировки усиления, второй выход которого предназначен для подключения к гаине контроля аварийного состояния, выход второго регистра соединен с вторым входом цифрового компаратора и предназначен для подключения к шине результата.
а первый и второй выходы цифрового компаратора предназначены для под-
ключения к шинам знака результата и контроля дублирования результата соответственно,
2. Преобразователь по п. 1, о т личающийся тем, что, с цлью улучшения эксплуатационных характеристик, он-снабжен ограничителями перемещения, установленными на концах звукопроводао
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь линейных перемещений | 1985 |
|
SU1394033A1 |
| МАГНИТОСТРИКЦИОННЫЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1994 |
|
RU2090839C1 |
| МАГНИТОСТРИКЦИОННЫЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1994 |
|
RU2109399C1 |
| МАГНИТОСТРИКЦИОННЫЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1999 |
|
RU2171967C2 |
| Ультразвуковой измерительный преобразователь скорости линейного перемещения | 1989 |
|
SU1747892A1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ ОБЪЕКТА | 1991 |
|
RU2031360C1 |
| Ультразвуковой измерительный преобразователь параметров движения | 1988 |
|
SU1613855A1 |
| ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 2000 |
|
RU2194946C2 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 2000 |
|
RU2189009C2 |
| МАГНИТОСТРИКЦИОННЫЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1993 |
|
RU2104482C1 |

Изобретение относится к измерительной технике и может быть использовано в системах измерения и контроля параметров перемещения контролируемого объекта. Целью изобретения является повышение помехоустойчивости и точности измерения линейных перемещений. Измерительный преобразователь содержит магнитофрикционный датчик линейных перемещений, основу которого составляют звукопровод и элементы записи и считывания, один из которых соединен с контролируемым объектом перемещения, и аналого-цифровой канал преобразования. Расстояние между элементами записи и считывания преобразуется в цифровой код. Одновременно формируется сигнал о направлении перемещения. Предусмотрена компенсация изменения скорости распространения ультразвуковых волн в звукопроводе путем преобразования значения эталонного расстояния в цифровой код, который затем используется при обработке информационного кода. 1 з.п.ф-лы, 3 ил.
t
25 в 29
JO 31 32
ФиеЛ
F f
3
W 3
и н
n П П П nl П n ni П
x
S
ие.г
| Магнитострикционный преобразователь перемещений | 1980 |
|
SU956965A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Магнитострикционный дифференциальный преобразователь перемещений | 1978 |
|
SU747812A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
