(21)3958311/25-28
(22)06.08.83
(46) 07.05.88. Бюл. № 17 (75) С.Б.Демин
(53)531.14 (088.8)
(56)Авторское свидетельство СССР № 956965, кл. G 01 В 7/00, 1982.
Авторское свидетельство СССР № 747812, кл. G 01 В 7/00, 1980.
(54)ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ
(57)Изобретение относится к измерительной технике, а именно к преобразователям информации, и может найти применение в системах измерения и контроля параметров линейного движения контролируемого объекта. Целью
изобретения является повышение помехоустойчивости и быстродействия преобразования измерительного преобразователя линейных перемещений за счет стабилизации волнового сопротивления звукопровода, использования логомет- рического вычисления кода линейного перемещения, автостабилизации амплитуды зондирующих импульсов и параллельного вычисления кода перемещения.. Первый регистр фиксирует время распространения прямого сигнала, второй регистр - время однажды отраженного сигнала, третий регистр - результат предьщущего измерения, который сравнивается компаратором с результатом еще более раннего измерения, что позволяет корректировать параметры работы схемы. 3 ил.
С 
СО
о
4;:
Изобретение относится к измерительной технике, а именно к преобразователям информации, и может найти применение в системах измерения и контроля параметров линейного движения контролируемого объекта.
Целью изобретения является повышение помехоустойчивости и быстродействия преобразователя линейных перемещений.
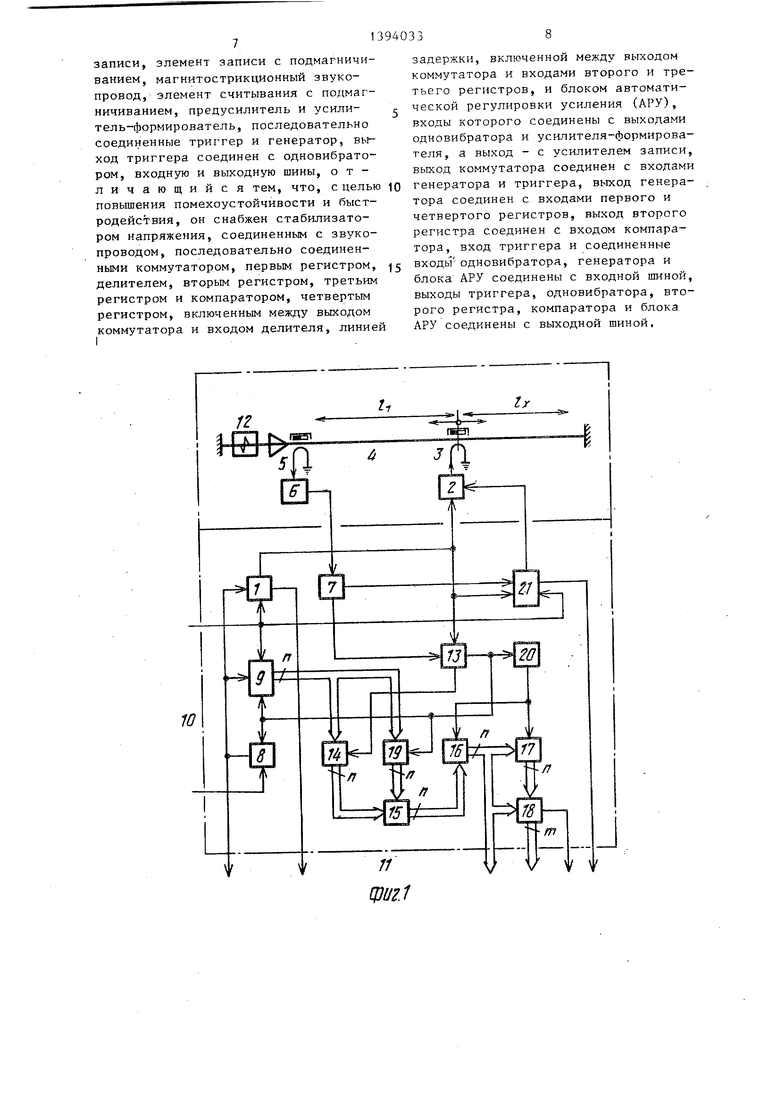
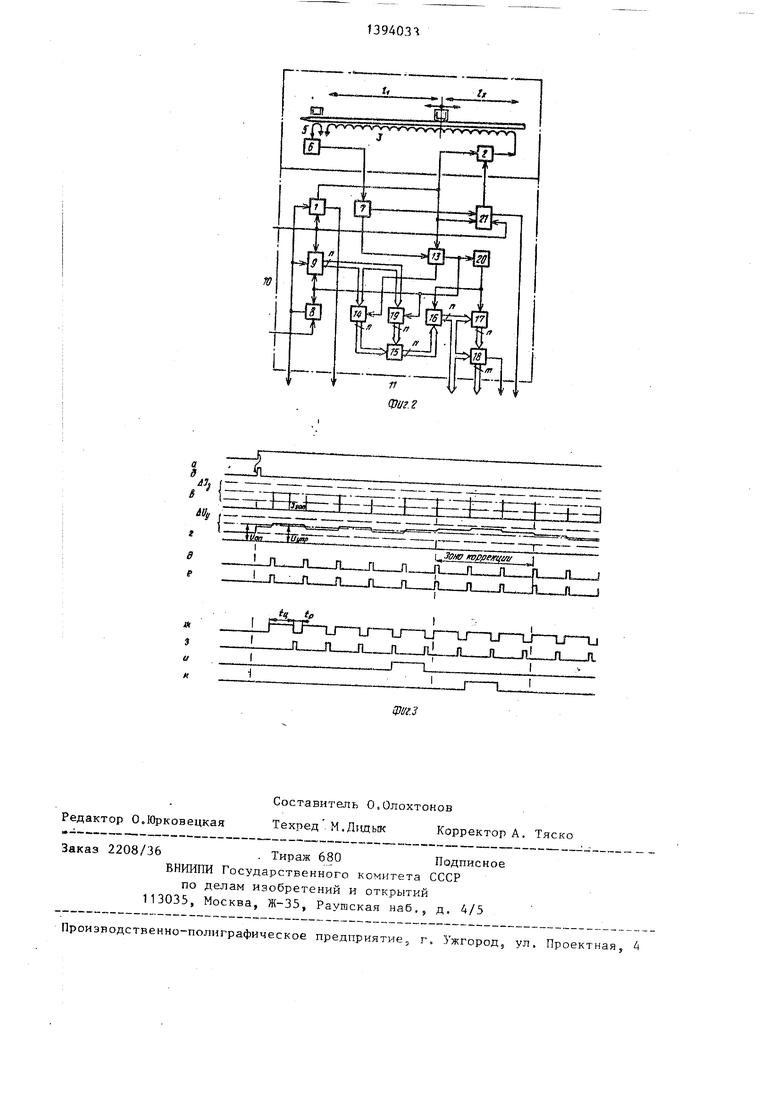
На фиг.1 и 2 представлены схемы преобразователя линейных перемещений при разном исполнении звукопровода; на фиг.З - временные диаграммы, по- ясняющие работу схемы.
Преобразователь линейных перемещений содержит последовательно соединенные одновибратор 1, усилитель 2 записи, элемент 3 записи с подмагни- чиванием,; магнитострикционный звуко- провод 4, элемент 5 считывания с подмагничиванием, предусилитель 6 и усилитель-формирователь 7, последовательно соединенные триггер 8 ц ге- нератор 9, выход триггера 8 соединен с одновибратором 1, входную 10 и выходную 11 шины, стабилизатор 12 нап- ряжения, соединенный с звукопроводом 4, последовательно соединенные ком- мутатор 13, первый регистр 14, делитель 15, второй регистр 16, третий регистр 17 и компаратор 18, четверты регистр 19, включенный между выходом коммутатора 13 и входом делителя 15, линию 20 задержки, включенную между выходом коммутатора 13 и входами вто роге 16 и третьего 17 регистров, и блок 21 автоматической регулировки усиления (АРУ) , входы которого соеди- нены с выходами одновибратора 1 и усилителя-формирователя 7, а выход - с усилителем 2 записи, выход коммутатора 13 соединен с входами генератора 9 и триггера 8, выход генератора 9 соединен с входами первого 14 и четвертого 19 регистров, выход второго регистра 16 соединен с входом компаратора 18, вход триггера 8 и соединенные входы одновибратора 1, генератора 9 и блока 21 АРУ соединены с входной шиной 10, выход триггер 8, выходы одновибратора 1, второго регистра 16, компаратора 18 и блока 21 АРУ соединены с выходной шиной 11
Преобразователь работает следующи образом.
При поступлении цифрового сигнала Разрешение (фиг«За) по входной шин
д с
0
10 управления устройство переводится в режим работы. Производится разблокирование одновибратора 1, блока 21 АРУ и генератора 9 (фиг.1). Элементы преобразователя принудительно устанавливают в исходное состояние (фиг.36). Так, например, триггер 8 устанавливается в исходное нулевое) состояние,и по выходной шине запроса выставляется цифровой сигнал Запрос (фиг.Зж), а на первом выходе блока 21 АРУ формируется управляющее напряжение Vnpp uV,j регулирования амплитуды сигнала записи Ijo,n усилителя 2 записи (фиг.З г,в).
Через .время tp реакции в ответ на выставленный сигнал Запрос (фиг.Зж) по входной шине запуска выставляется цифровой импульсный сигнал Запуск (фиг.Зд). Производится переключение триггера 8 в единичное состояние, что приводит к снятию сигнала Запрос, запуску одновибратора 1 (фиг.Зе) и генератора 9, который выполнен в виде цифрового развертывающего генератора кодов.
Одновибратор 1 по первому выходу формирует цифровой импульсный сигнал, по которому запускаются блок 21 АРУ и управляемый усилитель 2 записи,
установленный в корпусе магнитострик- ционного датчика линейных перемещений.
БЛОК 21 АРУ работает в режиме поразрядного слежения, при котором величина управляющего напряжения отслеживается относительно задаваемого уровня слежения с учетом достижения максимального отношения сигнал/помеха и определяется величиной опорного напряжения Uon (фиг.Зг)
V VF v .2,...,K, (1)
где q - квант управляющего напряжения блока 21 АРУ; i - число тактов регулирования. Выходное напряжение блока 21 АРУ определяет величину рабочего тока записи 1 ,д„ управляемого усилителя 2 записи магнитострикционного датчика линейных перемещений (фиг.Зв)
мп р -
(2)
где f () - функция регулирования.
При правильной работе блока 21 АРУ токовый сигнал записи (2) отслеживается относительно заданного уровня (1) в диапазоне (фиг.Зв)
ъап зап. i
+q, ,2,...,K, (3)
где q.
- квант токового сигнала записи усилителя 2 записи. Б случае нарушения режима работы блока 21 АРУ через тактов регулирования на его втором выходе формируется цифровой сигнал Авария (фиг.Зк), который поступает в выходную шину контроля аварийного состояния устройства. Это означает,что имеет место нарушение прохождения зондирующего ультразвукового сигнала через среду звукопровода магнитострик- ционного датчика линейных перемещений
в результате его обрыва или фрикцион- 20 Т, (где f - частота дискретизации),
сформированного в данный момент Tj на выходах генератора 9. Производится переключение коммутатора 13 в протиногр контакта с основанием элемента записи. По сигналу Авария может производиться общий останов преобразователя с его последующим перезапуском (рестартом).
По сигналу одновибратора 1 запускается управляемый усилитель 2 записи. На его выходе формируется калиброванный по длительности видеоимпульс соответствующей амплитуды (3). Этот токовый сигнал проходит через активную среду подвижного элемента 3 записи электромагнитного возбуждения, имеющего кинематическое соединение с объектом контролируемого перемещения, и наводит под ним в магнитострик- ционном канале передачи датчика соответствующую по амплитуде АО ультразвуковую импульсную волну механичес- кбй деформации вследствие прямого магнитострикционного преобразования (эффект Джоуля). I
Возбужденная в звукопроводе датчика ультразвуковая волна механической деформации распространяется в обе стороны от источника сообщения со скоростью V .
Распространяясь влево (по фиг.1), наведенная ультразвуковая волна через время Tj 1,/V, где 1,- линейное расстояние между элементами 3 и 5 записи и считывания датчика, достигает неподвижно Закрепленного элемента 5 считывания электромагнитного возбужвоположное состояние; ).вы- 25 ход 2.
В это время другая ультразвуковая волна распространяется вправо (по фиг.1) по звукопроводу датчика преобразователя, достигает зоны отражения, отражается и меняет направление свое30
35
40
45
50
го движения. Через время Т2( +21x)/V, где 1х- искомое линейное расстояние между элементом 5 записи и свободным концом звукопровода, отраженная ультразвуковая волна достигает элемента 5 считывания. Как и в первом случае, наводит на выходе этого элемента импульс напряжения искомой амплитуды. Сформированный сигнал проходит через предусилитель 6 считывания датчика и усилитель-формирователь 7. В результате на его первом выходе формируется аналоговый сигнал считывания с амплитудой
V.K.-A. , (4)
где коэффициент магнитомеханической связи;
а - коэффициент затухания звукопровода.
Этот сигнал проходит на третий вход блока 21 АРУ, где производится его амплитудный анализ. На другом выходе усилителя-формирователя 7 фордения и, пройдя под ним по звукопро- 55 миРУется цифровой импульсный сигнал
(видеоимпульс), по которому производится запись текущего кода N,- с выхода измерительного генератора 9
воду, наводит на его выходе импульс напряжения. Распространяясь далее влево по эвукопроводу, ультразвуковая волна механической деформации
в четвертый регистр 19 Tj. Ком
к- й
394033
достигает акустического демпфера и рассеивает на нем свою энергию. Иск.гао- чается возможность образования в зву- копроводе датчика вторичных (неинформационных) ультразвуковых сигналов.
Наведенный импульсный сигнал считывания на выходе элемента 5 считывания проходит на вход предусилителя
10 с ограниченной полосой пропускания, установленного в корпусе магнитострик- ционного датчика линейных перемещений. Здесь сигнал считывания усиливается и проходит далее на вход усилителя15 формирователя. Импульсный сигнал считывания преобразуется в цифровой сигнал (видеоимпульс). По этому сигналу производится запись в первый регистр 14 текущего п-разрядного кода N,
воположное состояние; ).вы- 5 ход 2.
В это время другая ультразвуковая волна распространяется вправо (по фиг.1) по звукопроводу датчика преобразователя, достигает зоны отражения, отражается и меняет направление свое0
5
0
5
0
го движения. Через время Т2( +21x)/V, где 1х- искомое линейное расстояние между элементом 5 записи и свободным концом звукопровода, отраженная ультразвуковая волна достигает элемента 5 считывания. Как и в первом случае, наводит на выходе этого элемента импульс напряжения искомой амплитуды. Сформированный сигнал проходит через предусилитель 6 считывания датчика и усилитель-формирователь 7. В результате на его первом выходе формируется аналоговый сигнал считывания с амплитудой
V.K.-A. , (4)
где коэффициент магнитомеханической связи;
а - коэффициент затухания звукопровода.
Этот сигнал проходит на третий вход блока 21 АРУ, где производится его амплитудный анализ. На другом выходе усилителя-формирователя 7 форв четвертый регистр 19 Tj. Коммутатор 13 переключается в исходное состояние: вход - выход 1, триггер 8 устанавливается в исходное состояние, производится блокирование (останов) измерительного генератора 9.
В следующий момент коды N, и N интервалов Т и T,j линейного переме- :|цения с п-разрядных выходов регист- ;ров 14 и 19 проходят на входы дели- :теля 15. Выполняется табличное вычис- |ление результирующего кода линейного перемещения с коррекцией нелинейности (1/1,)
f(l.L+21x)/V о 1х
f-T,/V
1,
+ 1.
(5)
; Через время Гг: сГ,5 + ,9 где Tj |И ЕГ,9 - время распространения инфор- |мационных сигналов через электричес- |кие цепи элементов 19 и 15, по цифро- вому импульсному сигналу линии 20 25 задержки производится перезапирь кода предьздущего преобразования из второго регистра 16 в третий регистр 17 N N и кода текущего преобразования с
выходов делителя 15 во второй регистр
16 NX N,. : С п-разрядного выхода второго ре- ;гистра 16 код N текущего преобразо- ;вания поступает на один их входов : цифрового компаратора 18 и проходит I в выходную разрядную шину результата ; формируя сигнал Код линейного пере- : мещения. На другой его вход с выхода третьего регистра 17 поступает п-раз- рядный код N предьщущего преобразо- ванияо Цифровой компаратор 18 выпол- няет теущий анализ смежных вычислен- - ных кодов N и N линейного перемещения на равнбзначность и формирует код знака перемещения.
Сформированный т-разрядный код N ,jj знака перемещения проходит с выходов цифрового компаратора 18 в выходную шину, формируя сигнал Знак перемещения. А на его выходе равI - .
нозначности, при выполнении условия
N NX , формируется цифровой сигнал Дублирование (), который проходит в вькодную шину.На этом полный цикл преобразования линейного перемещения в код заканчивается, и по вьтходной шине устройства выставляются цифровые сигналы Запрос и Синхронизация (фиг.Зж
0
5
0
5
0
5
50
з). Устройство подготовлено к очередному циклу преобразования, который начинается при поступлении сигнала Запуск и выполняется без измерений согласно рассмотренному.
Кроме того, измерительный преобразователь линейных перемещений может быть выполнен с использованием стержневого магнито-стрикционного датчика линейных перемещений (фиг.2). При этом элемент 3 записи электромагнитного возгбуждения выполнен неподвижным и размещен по всей длине звуко- провода 4 зоны перемещения подвижного элемента подмагничивания, имеющего кинематическое соединение с объектом контролируемого перемещения. Работа измерительного преобразователя по фиг.2 не отличается от работы преобразователя по фиг.1.
Таким образом, использование в преобразователе логометрического вычисления результирующего кода линейного перемещения и стабилизация крутизны фронта зондирующих ультразвуковых импульсов звукопровода в диапазоне преобразования за счет стабилизации электромагнитного волнового сопротивления звукопровода посредством стабилизатора 12 растягивающих усилий (фиг.1) и повьшения жесткости (фиг.2) обеспечивают требуемую точность измерения, определяемую частотой дискретизации интервалов линейных перемещений.
Повышение помехоустойчивости преобразователя достигается в результате автостабилизации амплитуды зондирующих ультразвуковых импульсов звукопровода из условия максимального отношения сигнал/помеха.
Повышение быстродействия преобразователя достигается в результате использования параллельного табличного вычисления кода линейного перемещения.
Преимущества преобразователя заключаются также в расширении функциональных возможностей, формировании более полной измерительной информации перемещения, а также в повышении надежности за счет использования однотипной элементной базы.
Формула изобретения
Преобразователь линейных перемещений, содержащий последовательно соединенные одновибратор, усилитель
записи, элемент записи с подмагничи- ванием, магнитострикционный звуко- провод, элемент считывания с подмаг- ничиванием, предусилитель и усилитель-формирователь, последовательно соединенные триггер и генератор, выход триггера соединен с одновибрато- ром, входную и выходную шины, отличающийся тем, что, с целью повышения помехоустойчивости и быстродействия, он снабжен стабилизатором напряжения, соединенным с звуко- проводом, последовательно соединен- ньми коммутатором, первым регистром, делителем, вторым регистром, третьим регистром и компаратором, четвертым регистром, включенным между выходом коммутатора и входом делителя, линие
задержки, включенной между выходом коммутатора и входами второго и третьего регистров, и блоком автоматй- г ческой регулировки усиления (АРУ), входы которого соединены с выходами одновибратора и усилителя-формирователя, а выход - с усилителем записи, выход коммутатора соединен с входами
0 генератора и триггера, выход генератора соединен с входами первого и четвертого регистров, выход второго регистра соединен с входом компаратора, вход триггера и соединенные
5 входы одновибратора, генератора и блока АРУ соединены с входной шиной, выходы триггера, одновибратора, второго регистра, компаратора и блока АРУ соединены с выходной шиной.
f -
,
ЕБЕЫ
У-г
iiW fg№
-LJU- a.
M 9 tf к
ЕЗ
nyppf/fiji J
JL ™fL--JL -Jl
П n П n
