Изобретение относится к измерительной технике, а именно к преобразователям информации, и может быть использовано в робототех шческих системах и комплексах для измерегшя и контроля параметров движения объекта .
Цель изобретения- расширение области использования путём формирования более полной измерительной информации о параметрах движения контролируемого объекта.
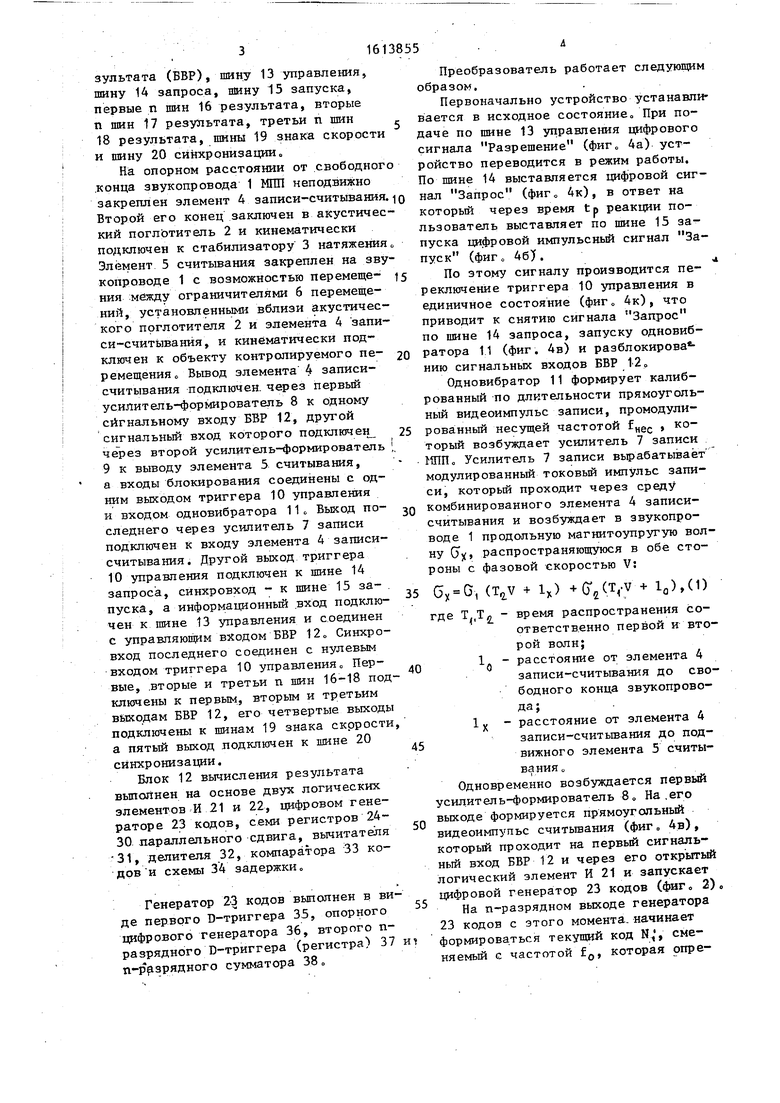
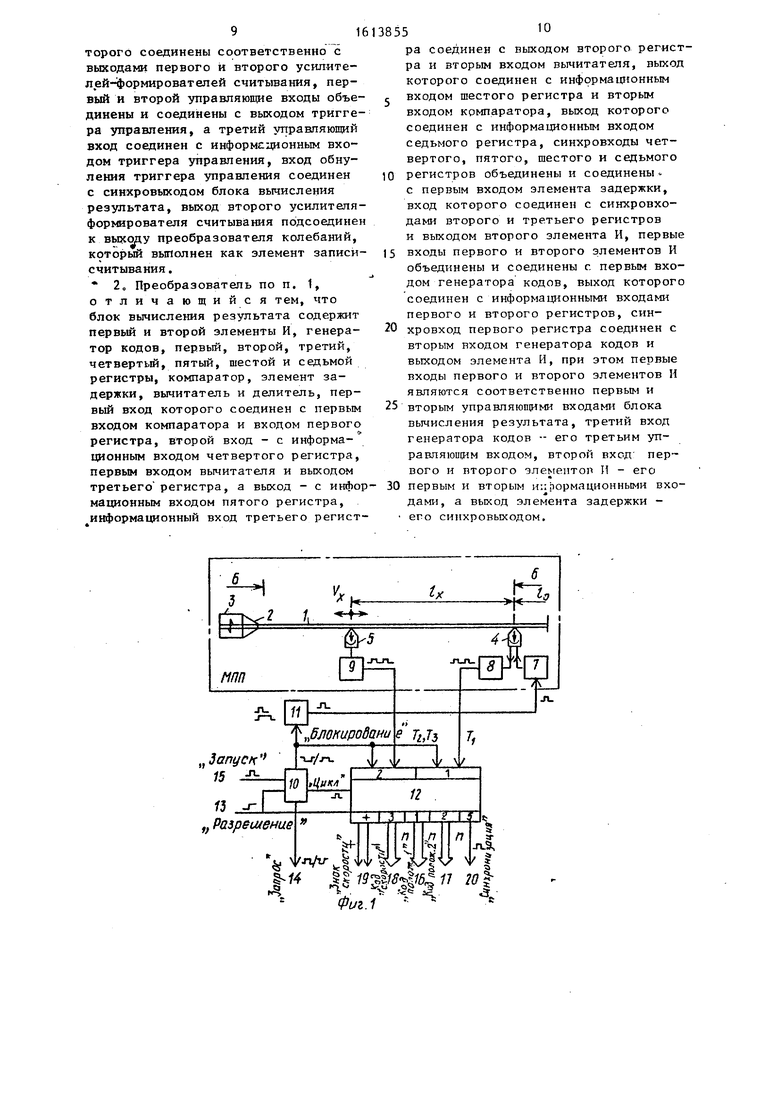
На фиг. 1 приведена структурная схема измерительного преобразователя; на фиг. 2 - схема блока вычисления результата пример исполнения; на фиг. 3 - схема генератора кодов;
на фиг„4 - основные временные диаг- работы устройства |
Преобразователь линейных переме- : щений содержит магнитострикционный преобразователь линейных перемеще- ний (МПП) , состоящий из струнного (ленточного) прямолинейного звукопро- I вода 1 из магнитострикционного материала со свободным концом, акустического поглотителя 2 со стабилизатором 3 натяжения, неподвижного.элемента 4 записи-считывания, подвижного элемента 5 считывания, двух ограничителей б перемещений, усилителя 7 записи и двух сигнальных ус1шителей-формирователей 8 и 9, триггер 10 управления, одно- вибратор 11, блок 12 вычисления реа
CXD 00 СП
ел
«д
20
25
31613855
ультата (БВР), шину 13 управления, ину 1А запроса, айну 15 запуска, ервые п шин 16 результата, вторые шин 17 результата, третьи п шин
18 результата, шины 19 знака скорости и шину 20 синхронизации
На опорном расстоянии от свободного .конца звукопровода 1 МПП неподвижно закреплен элемент 4 записи-считывания, iQ Второй его конец заключен в акустический поглотитель 2 и кинематически подключен к стабилизатору 3 натяжения. Элемент 5 считывания закреплен на зву- копроводе 1 с возможностью перемеще- is нип :между ограничителями 6 перемеще- нш , установленными вблизи акустического поглотителя 2 и элемента 4 записи-считывания, и кинематически подключен к объекту контролируемого перемещения Вывод элемента 4 записи- считывания подключен, через первый усилитель-формирователь 8 к одному сигнальному входу ВВР 12, другой сигнальный вход которого подключен через второй усилитель-формирователь 9 к выводу элемента 5 считывания, а входы блокирования соединены с одним выходом триггера 10 управления и входом одновибратора 11 Выход последнего через усилитель 7 записи подключен к входу элемента 4 записи- считывания. Другой выход триггера 10 управления подключен к шине 14 запроса, синхровход - к шине 15 за- . пуска, а информационный вход подключен к шине 13 управления и соединен с управляющим входом БВР 12„ Синхровход последнего соединен с нулевым
входом триггера 10 вые, вторые и третьи п шин 16-18 под ключены к первьш, вторьм и выходам БВР 12, его четвертые вьпсоды подключены к 19 знака скорости, а пятый выход подключен к шине ги синхронизации.
Блок 12 вычисления результата выполнен на основе двух логических элементов И 21 и 22, цифровом гене раторе 23 кодов, семи регистров 24- 30. параллельного .сдвига,вычитателя -31, делителя 32, компаратора 3J кодов и схемы 34 задержки.
30
.
35
40
45
Генератор 23 кодов выполнен в ви яе первого D-триггера 35, опорного .фрового генератора 3 второ п
55
Одновременно возбуждается первый усилитель-Формирователь 8о На .его выходе формируется прямоугольньй видеоимпульс считьшания (фиг. 4в}, который проходит на первый сигналь- ньй вход БВР 12 и через его открытый логический элемент И 21 и запускает цифровой генератор 23 кодов (фиг 2Ь
На п-разрядном выходе генератора 23 кодов с этого момента, начинает
ФРОВОГО « Р-° „3( :™Га° 7 „, ГоРНиГова ься .eKV«. код ,, сне- разрядного D-григгера (регистра. частотой „, которая рпреJJd -
п-р зрядного сумматора з
0
25
s
30
Преобразователь работает следующим
образом.
Первоначально устройство устанавливается в исходное состояние. При подаче по шине 13 управления цифрового сигнала Разрешение (фиг. 4а) устройство переводится в режим работы. По шине 14 выставляется цифровой сигнал Запрос (фиг о 4к), в ответ на который через время tp реакции пользователь выставляет по шине 15 пуска цифровой импульсный сигнал Запуск (фиг. 46).J
По этому сигналу производится переключение триггера 10 управления в единичное состояние (фиг. 4к), что приводит к снятию сигнала Запрос по шине 14 запроса, запуску одновибратора 11 (фиг. 4в) и разблокирова - нию сигнальных входов БВР 12о
Одновибратор 11 формирует калиброванный по длительности прямоугольный видеоимпульс записи, промодули- рованный несущей частотой ° торый возбуждает усилитель 7 записи . . 1ШПо Усилитель 7 записи вьфабатывает модулированный токовый импульс записи, который проходит через среду комбинированного элемента 4 записи- считывания и возбуждает в звукопро- воде 1 продольную магнитоупругую волну СУх распространяющуюся в обе стороны с фазовой скоростью V:
35 G, G, (4V-V 1,) +(r,(TvV-«-io),(i)
где Т
,.
45
50
55
время распространения со- ответств.енно первой и второй волн;
1 - расстояние от элемента 4 записи-считывания до сво- бодного конца звукопровода;.
Ij - расстояние от элемента а записи-считьгоания до подвижного элемента 5 считывания .
Одновременно возбуждается первый усилитель-Формирователь 8о На .его выходе формируется прямоугольньй видеоимпульс считьшания (фиг. 4в}, который проходит на первый сигналь- ньй вход БВР 12 и через его открытый логический элемент И 21 и запускает цифровой генератор 23 кодов (фиг 2Ь
На п-разрядном выходе генератора 23 кодов с этого момента, начинает
„, ГоРНиГова ься .eKV«. код ,, сне- частотой „, которая рпределяет интервал дискретизации временных интервалов перемещений
Формируемый код Ny образует опорную цифровую кодовую шкалу и поступает на информационные входы регистров 24 и 25 параллельного сдвига. Генератор 23 кодов может быть выполнен по схеме, показанной на фиг 3. D-триггер 35 по.внешним сигналам .управляет работой опорного генератора 36 образцовой частоты f и регистра, выполненного на п D- триггерах 37..
Опорный генератор управляет разверткой интерполяционного кодового звена на п-разрядном D-триггере-регистре 37 и сумматоре 38, включенных в кольцо. При этом сумматор 38 может быть выполнен на программируемых логических элементах, что позволяет выполнить генератор 23 кодов как функциональный генератор, расширяя возможности устройства.
Зондирующая магнитоупругая волна0. распространяясь вправо (по фиг 1) по звукопроводу 1 МПП, в некоторь момент времени достигает свободного его конца, образующего границу полного отражения, отражается Синверти- руется, - Gi) и, распространяясь в сторону элемента 4 записи-считывания, достигает его через суммарное время
2 k
V
(2)
Проходя по звукопроводу 1 под элементом 4 зондирующая магнитоупругая волна - G« индуцирует на его выходе модулированный импульс, который преобразуется первьтм усилителем- формирователем 8 в прямоугольный видеоимпульс считывания (фиг. 4в), и, проходя на первый сигнальный вход БВР 12, записывает в его регистр 24 код N , который в момент времени (2) выставляется на п-разрядном выходе генератора 23 кодов. STOT код далее поступает на входы Цифровых компаратора 33 и делителя 32 (фиг, 2)
Магнитоупругие волны (J и (jj, распространяясь по звукопроводу 1 в сторону перемещающегося с искомой скоростью Vy контролируемого объекта подвижного элемента 5 считывания, достигают его через время соответственно
Т V+V.
(3)
161385S.
iiiiii .
V+Vy
(4)
Проходя по звукопроводу 1 под эле- 5 ментом 5 считывания, магнитоупругие волны G, .и -(jg индуцируют на его выходе модулированные импульсы напряжения, которые преобразуются вторым усилителем-формирователем 9 в прямо- 10 угольные видеоиьтульсы считьшания (фиг. 4г), и проходят на второй сигнальный вход БВР 12. Эти сигналы считывания проходят через его открытый логический элемент И 22 и произ- 5 водят запись в регистры 25 и 26 текущих кодов N и N3 Т -f , которые выставляются на выходах генератора 23 кодов в моменты времени (3) и (4), ак что в регистре 25
0
записывается код а в регистре
26 - код N ;. Далее код Nj поступает на одни входы вычитателя 31 и делите(Ля 32 и входы буферного регистра 27
(фиг. 2).
Па фиг. 4г, д, е показаны опорные сигналы соответственно при Vv О (фиг. .4г), +Vy (фиго 4д) и -V (фиг. 4е), формируемые на выходе сигнального усилителя-формирователя 9. 0 Если скорость объекта отлична от нулевой (УХ# 0), то наблюдается, некоторое временное прирав1ениё +ЛТ опорного интервала Т,, знак кот орого определяется направлением перемеще- 5 ния подвижного элемента 5 считывания ПШ. Так, если направления распространения продольной магнитоупру- гой волны и перемещения элемента 5 противоположны, то имеет место сум- 0 марная фазовая скорость (V+Vy) и знак приращения равен -uTi В противном случае, когда суммарная фазовая скорость равна (V-Vj; ) , знак прира- t щения равен обратному значению .+&Т. 5 Знак скорости перемещения N объекта вычисляется цифровым компара- :тором 33 БВР 12 согласно следующему jвыражению:
01, если N, (Vy);
10, если N, (-V,)} (5)
0
«зи
00, если N,-N4 О (Vj( 0),
где N4 Nj - код, который вычисляется вычитателем 31.
Сформированные коды ,, N4 про- ходят на входы буферных п-разрядного регистра 29 и двухразрядного регистра 30,
Таким образом, сформированньш код Ng на выходах-регистра 26 несет информацию непосредственног.о преоб-- раэования текущего положения 1у контролируемого объекта относительно магнитострикционной шкалы отсчета МПП, которому присущи известные недостатки. На выходах делителя 32 формируется код искомого перемещения 1,, объекта логометрического значения 5 , который проходит на вход ы п-разрядного буферного регистра -28.
10
товлено к очередному циклу преобразования, который выполняется-через время tpo При снятии по шине 13 управления сигнала Разрещение (фиг. 4а) запуск устройства по сигналу Запуск невозможен.
Высокая помехоустойчивость устройства достигается за счет использования модуляции зондирующего магнито- упругого сигнала МПП и применения стабилизатора 3 натяжения, обеспечивающих постоянство во времени волнового акустического сопротивления
Распространяясь далее по звукопро- з .магнитострикционного тракта передачу 1 ШП магнитоупругие волны G, ичи из у.словия максимально возможного -G Б некоторый момент времени дост1-1гают акустического поглотителя 2 и рассеивают на нем свою энергию. Так предотвращается образование в20
магнитострикционном тракте передачи (звукопроводе) лнрерсных (отраженных) . неи 1формациоынь к волн - О, и (Уо. « В следуюиц й момент , & C as . где сг, - время распространения сигналов через цепи элементов 25 и 32, на первом выходе схемы 34 за- держки выставляется цифровой импульс синхродазации (фиг. 4ж), по которому гроизводится запись вычисленных ко- зО дов N, N, N4 и N34B регистры 27- 30 и переключение в исходное состояние (нулевое) триггера 10 управления
(фиг. 4и) .
С выходов регистров 27-30 искомые коды, соответственно Код положения 1, Код положения 2, Код скорости и Знак скорости, проходят на первые, вторые и третьи п-разрядные .шины 16-18 результата и щину 19
(фиг о 1 и 2) .
Перевод триггера 10 управления в нулевое состояние по сигналу Цикл приводит к блокированию сигнальных входов БВР,- защищая от прохождения, ложных импульсных сигналов вне цикла преобразования, и формированию,
шине 14 запроса сигнала Запрос
(фиг. 4к).л л л .
Б следующий момент t/ - зО где 27-го - Р распространения сигналов через элементы 27-30, на другом выходе схемы 34 задержки выставляется цифровой импульсный сигнал, который проходит на щину /и синхронизации и формирует сигнал Синхронизация (фиг. 4з)„
На этом полный цикл преобразова- .ния заканчивается, устройство подгоНг1 г1 -3 У 4-JI vJ О-1П л XTic I lL i. .
отнощения сигнал/помеха. Наличие ограничителей перемещения МПП повы- щает его надежность за счет предохра нения от возможного механического разрущения элементов кинематической схемы в крайних точках диапазона преобразования.
25 Формула изобретения
1., Ультразвуковой измерительный преобразователь параметров движения содержащий прямолинейный звукопрово из магнитострикционного материала с свободным концом, стабилизатор растягивающих усилий и акустический поглотитель, расположенные на дру- , гом конце звукопровода, преобразова тель колебаний, установленный непод вижно на звукопроводе на опорном ра стоянии от его свободного конца, сосредоточенный элемент считывания, установленный на рабочей части звукопровода и вьшолненный с возможностью перемещения вдоль звукопровода и кинематического подключения к объекту контроля, усилитель записи и усилитель-Формирователь считывания, подключенные к выходам соответственно преобразователя колебаний и элемента считывания, формиро ватель импульсов записи и триггер управления, подключенный через фор мирователь импульсов записи к входу усилителя записи, отлича ющийся тем, что, с целью рас щирения области использования за счет формирования более полной изм рительной информации о параметрах движения объекта, он снабжен вторы усилителем-Формирователем считывания и блоком вычисления результата первый и второй сигнальные входы к
35
40
45
0
товлено к очередному циклу преобразования, который выполняется-через время tpo При снятии по шине 13 управления сигнала Разрещение (фиг. 4а) запуск устройства по сигналу Запуск невозможен.
Высокая помехоустойчивость устройства достигается за счет использования модуляции зондирующего магнито- упругого сигнала МПП и применения стабилизатора 3 натяжения, обеспечивающих постоянство во времени волнового акустического сопротивления
з .магнитострикционного тракта передачи из у.словия максимально возможного
магнитострикционного тракта передачи из у.словия максимально возможного
Нг1 г1 -3 У 4-JI vJ О-1П л XTic I lL i. .
отнощения сигнал/помеха. Наличие ограничителей перемещения МПП повы- щает его надежность за счет предохранения от возможного механического разрущения элементов кинематической схемы в крайних точках диапазона преобразования.
зО
зО
5 Формула изобретения
1., Ультразвуковой измерительный преобразователь параметров движения, содержащий прямолинейный звукопровод из магнитострикционного материала со свободным концом, стабилизатор растягивающих усилий и акустический поглотитель, расположенные на дру- , гом конце звукопровода, преобразователь колебаний, установленный неподвижно на звукопроводе на опорном расстоянии от его свободного конца, сосредоточенный элемент считывания, установленный на рабочей части звукопровода и вьшолненный с возможностью перемещения вдоль звукопровода и кинематического подключения к объекту контроля, усилитель записи и усилитель-Формирователь считывания, подключенные к выходам соответственно преобразователя колебаний и элемента считывания, формирователь импульсов записи и триггер управления, подключенный через формирователь импульсов записи к входу усилителя записи, отличающийся тем, что, с целью рас- щирения области использования за счет формирования более полной измерительной информации о параметрах движения объекта, он снабжен вторым усилителем-Формирователем считывания и блоком вычисления результата, первый и второй сигнальные входы ко35
40
45
91
торого соединены соответственно с выходами первого и второго усилителей-формирователей считывания, первый и второй управляющие входы объединены и соединены с выходом триггера управления, а третий управляющий вход соединен с информационным входом триггера управления, вход обнуления триггера управления соединен с синхровыходом блока вычисления результата, выход второго усилителя- формирователя считывания подсоединен к выходу преобразователя колебаний, который выполнен как элемент записи- считывания .
2, Преобразователь по п. 1, отличающийся тем, что блок вычисления результата содержит первый и второй элементы И, генератор кодов, первый, второй, третий, четвертый, пятый, шестой и седьмой регистры, компаратор, элемент задержки, вычитатель и делитель, первый вход которого соединен с первым входом компаратора и входом первого регистра, второй вход - с информационным входом четвертого регистра, первым входом вычитателя и выходом третьего регистра, а выход - с инфо мационным входом пятого регистра, информационный вход третьего регист385510
ра соединен с выходом второго регистра и вторым входом вычитателя, выход которого соединен с информационным
, входом шестого регистра и вторым входом крмпаратора, выход которого соединен с информационным входом седьмого регистра, синхровходы четвертого, пятого, шестого и седьмого
10 регистров объединены и соединены., с первым входом элемента задержки, вход которого соединен с синхровхо- дами второго и третьего регистров и выходом второго элемента И, первые
15 входы первого и второго элементов И объединены и соединены с первым входом генератора кодов, выход которого соединен с информационными входами первого и второго регистров, син20 хровход первого регистра соединен с вторым входом генератора кодов и выходом элемента И, при этом первые входы первого и второго элементов И являются соответственно первым и
25 вторым управляюп(ими входами блока вычисления результата, третий вход генератора кодов - его третьим уп- равляюи(им входом, второй вход первого и второго элемептоп И - его 30 первым и вторым ипрормационными входами, а выход элемента задержки - его сиихровыходом.
От 8
От 9


| название | год | авторы | номер документа |
|---|---|---|---|
| Ультразвуковой измеритель перемещений | 1989 |
|
SU1619027A1 |
| Ультразвуковой измеритель линейных перемещений | 1989 |
|
SU1645812A1 |
| Измерительный преобразователь линейных перемещений | 1988 |
|
SU1589051A1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2011294C1 |
| Ультразвуковой измерительный преобразователь скорости линейного перемещения | 1989 |
|
SU1747892A1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ ОБЪЕКТА | 1991 |
|
RU2031360C1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 2000 |
|
RU2189009C2 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2039930C1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 2005 |
|
RU2318186C2 |
| Ультразвуковой измеритель перемещений | 1989 |
|
SU1620834A1 |

Изобретение относится к измерительной технике, а именно к преобразователям информации, и может быть использовано в робототехнических системах и комплексах для измерения параметров движения объекта. Целью изобретения является расширение области использования за счет формирования более полной измерительной информации о параметрах движения контролируемого объекта. Элемент записи-считывания возбуждает волны, которые распространяются в обе стороны по звукопроводу, и принимает волну, отраженную от свободного конца звукопровода. Элемент считывания, кинематически соединенный с объектом контроля, принимает две волны - непосредственно от элемента записи-считывания и отраженную от свободного конца звукопровода. В преобразователе осуществляется измерение времен распространения волн и сравнение этих времен, в результате которого вырабатывается информация о величине, скорости и направлении перемещения объекта. 1 з.п. ф-лы, 4 ил.
21
J-U-I.
От 15
От 13
Л-/5Фиг. 2
Фиг. 5
уу 22
12
I
лл.
,
К19
КГб
КП К10(2)
24,25 Л
„ Ра5решение
3anycf
«a
Э
„ Cuf XJУOШдaцuя.,)/
+5 K.
„Запрос {p
Xl
jTL
fl
(f 5
;
л
JLJL /
/УГ
i/ Блокирование
3
г/ /r
i/г.
| Преобразователь линейных перемещений | 1985 |
|
SU1394033A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
