-150
датчик 5 потерь зерна, блок 6 памяти, соединенный с вторым входом сумматора 10 через второй вычитающий 9 и нормирующий 13 блоки. Кроме то- го, устройство снабжено пороговым блоком 11, элементом 12 задержки и блоком 7 задания режимов. Наличие перечисленных элементов и соответствующих связей между ними обеспечи-
14
вает полуавтоматический выбор и запоминание оптимальных для конкретных условий работы режимов техпроцесса (угловой скорости вращения молотильного барабана и допустимых потерь зерна). Эти ражимы воспроизводятся автоматически при использовании комбайна п условиях, аналогичных преды- ДУ1ЦИМ. 1 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического регулирования загрузки зерноуборочного комбайна | 1976 |
|
SU745417A1 |
| Устройство для автоматического управления движением самоходного шасси | 1981 |
|
SU1090275A1 |
| Устройство для измерения температуры и энергии электромагнитного излучения | 1984 |
|
SU1283545A1 |
| Устройство для измерения неэлектрических величин | 1987 |
|
SU1583755A1 |
| Способ диагностирования двигателя внутреннего сгорания и устройство для его осуществления | 1986 |
|
SU1442854A1 |
| Способ диагностирования подвижных сопряжений двигателя внутреннего сгорания и устройство для его осуществления | 1987 |
|
SU1478072A1 |
| Устройство для измерения динамики роста и температуры растения | 1987 |
|
SU1496705A1 |
| Способ определения влажности зерновки и устройство для его осуществления | 1984 |
|
SU1268123A1 |
| Умножитель частоты | 1985 |
|
SU1317642A1 |
| Устройство для измерения нескольких физических величин одним чувствительным элементом | 1982 |
|
SU1237911A1 |
Изобретение относится к сельскому хозяйству , в частности, к устройствам автоматического регулирования загрузки зерноуборочного комбайна. Цель изобретения - повышение точности регулирования загрузки зерноуборочного комбайна. Устройство содержит датчик 1 и задатчик 3 угловой скорости молотильного барабана, датчик 4 потерь зерна и исполнительный механизм 14. В схему устройства введены два вычитающих блока 8 и 9, задатчик 5 потерь зерна, блок 6 памяти, соединенный со вторым входом сумматора 10 через второй вычитающий 9 и нормирующий 13 блоки. Кроме того, устройство снабжено пороговым блоком 11,элементом 12 задержки и блоком 7 задания режимов. Наличие перечисленных элементов и соответствующих связей между ними обеспечивает полуавтоматический выбор и запоминание оптимальных для конкретных условий работы техпроцесса (угловой скорости вращения молотильного барабана и допустимых потерь зерна). Эти режимы воспроизводятся автоматически при использовании комбайна в условиях, аналогичных предыдущим. 1 ил.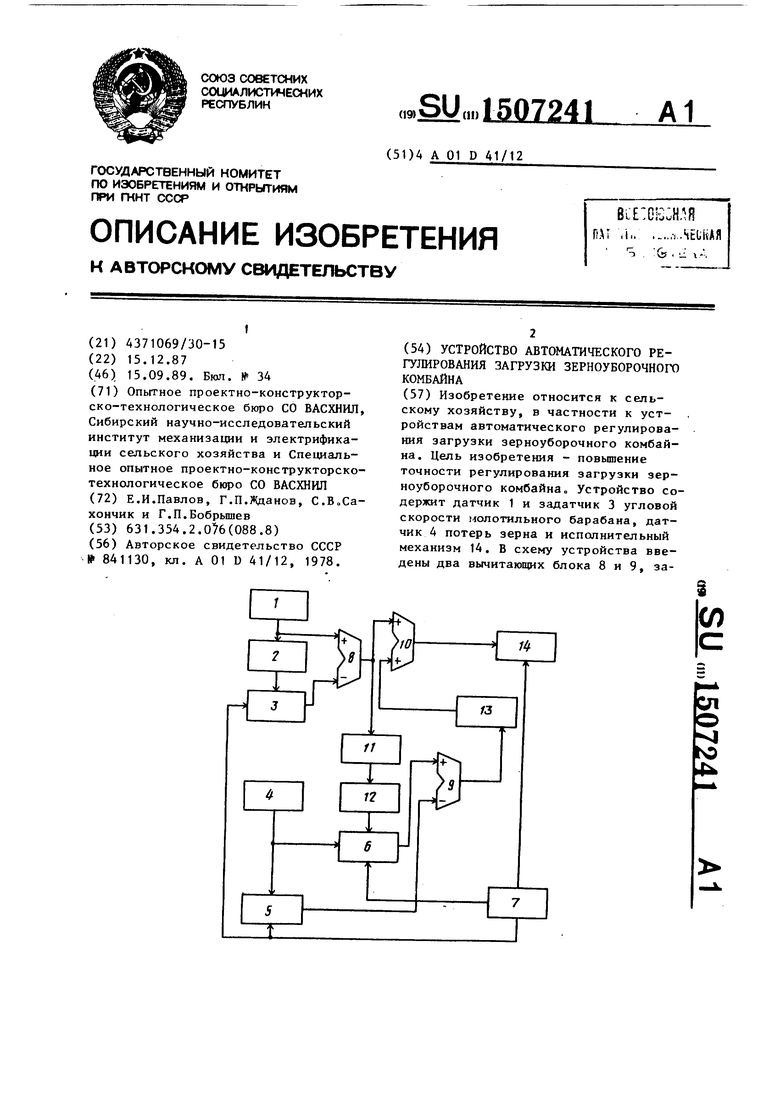
Изобретение относится к сельско- му хозяйству, в частности к устройствам автоматизации регулирования загрузки зерноуборочного комбайна
Цель изобретения - повышение точ- ности регулирования загрузки зерноуборочного комбайна.
На чертеже приведена структурная схема предд1агаемого устройства томатического регулирования загрузки зерноуборочного комбайна.
Устройство содержит датчик 1 угловой скорости молотильного барабана, блок 2 осреднения, задатчик 3 угловой скорости молотильного барабана, датчик 4 потерь зерна, задатчик 5 потерь зерна, блок 6 памяти, блок 7 задания режимов, первый вычитающий блок 8, второй вычитающий блок 9, сумматор 10, пороговый блок 11, элемент 12 задержки, нормирующий бло 13, исполнительный механизм 14. Выход датчика 1 угловой скорости мо- лотипьного барабана подключен к первому входу первого вычитающего уст- ройства 8 и через блок 2 осреднения к первом входу задатчика 3 угловой скорости. Выход датчика 4 потерь подключен к информационному входу блока 6 памяти и к первому входу задатчика 5 потерь. Выход задатчика 5 потерь зерна подключен к второму входу второго вычитающего устройства 9. Первый выход блока 7 задания режимов подключен к второму входу задатчика 5 потерь зерна и к второму входу задатчика 3 угловой скорости, второй его выход подключен к второму входу блока 6 памяти, а третий выход - к второму входу исполнительно- го механизма 14. Выход первого вьми- тающего блока,8 подключен к первому входу сумматора 10 и через пороговый блок 11 и элемент 12 задержки - к
5
0
5
5 0
первому входу блока 6 памяти, Выход блока 6 памяти подключен к первому входу второго вычитающего блока 9. Выход второго вычитающего блока 9 через нормируюпшй блок 13 подключен к второму входу сумматора 10, выход которого соединен с первым входом исполнительного механизма 14.
Устройство может быть вьЕПолнено как на аналоговых, так и на цифровых элементах обработки информации.
Для цифрового варианта отдельные блоки устройства могут быть выполнены, например, следующим образом.
Датчик 1 угловой скорости молотильного барабана представляет собой индуктивный датчик скорости вращения с преобразователем числа импульсов в код. Блок 2 осреднения выполнен в виду сумматора и делителя на число циклов осреднения, например на базе микропроцессора К587 ИК1о Задатчик 3 угловой скорости молотильного барабана задатчик 5 потерь зерна и блок 6 памяти представляют собой запоминаюш 1е устройства, например, на элементах К176, РУ2, 564 РУ2 и т.п. Датчик 4 потерь зерна представляет собой пьезоэлектрический элемент, регистрирующий удары падающих зерен с преобразователем числа получаемых импульсов. Могут быть применены датчики серийно выпускаемых приборов УПЗ и СИИП. Блок 7 задания режимов представляет собой коммутирующее устройство, при помощи переключателей устанавливающее режимы работы соответствующих блоков устройства. Вычитающие блоки 8 и 9 и сумматор 10 могут быть выполнены на цифровых элементах типа К176 ИМ1, К 564 ИМ1 на основе микропроцессоров серий К 580, К 589 и т.п. Пороговый блок 11 вьтолнен в виде устройства сравнения кодов, например, на мик515
росхеме 56АСА1 ,Элемент 12 задержки вьтолнен в виде одновибратора, например, на микросхеме 155 АГ1. Нормирующий блок 13 представляет собой устройство умножения на постоянный коэффициент и может быть выполнено на арифметически-логических устройствах, например, К155 ИПЗ или на микропроцессоре. Исполнительный меха- низм 14 представляет собой электрогидравлический усилит&пь с логикой на входе.
Устройство работает следующим образом.
Имеются три режима работы: Задание , Автомат, Переезд.
Режим Задание. В этом режиме с блока 7 задания режимов с первого выхода разрешаюи ий потенциал поступает на вторые входы задатчика 3 угловой скорости и задатчика 3 потерь зерна, с второго выхода разрешающий потенп 1ал поступает на блок 6 памяти, а с третьего выхода запрещающий потендаал поступает на исполргительный механизм 14. Операто вручную выбирает оптимальную скорость движения комбайна, используя указатели скорости вращения моло- тильного барабана и потерь зерна. Датчик 1 угловой скорости формирует сигнал (аналоговый или цифровой) пропори 1ональный мгновенной скорост вращения молотильного барабана, В блоке 2 осреднения вычисляется средняя скорость молотильного барабана за определенный интервал времени, который должен составлять 10-20 с. Полученное значение поступает на вход задатчика 3 угловой скорости, запоминается в нем и хранится до окончания следующего цикла осреднения, после чего информация обновляется. С датчика 4 потерь зерна сиг- нал, пропорциональный средним потерям за молотилкой за время 20--60 с, поступает на информационные входы блока 6 памяти и задатчика 5 потерь зерна. В блоке 6 памяти происходит постоянное обновление информации о потерях в соответствии с циклом измерения потерь. В задатчике 5 потерь также происходит обновление информации до окончания режима За- дйние. Исполнительный механизм в , этом режиме заблокирован и управление кобмайном осуи ествляется вручну Состояние остальных блоков устройс
0
5
0 5 0 5 0
1Л
может быть любым, чтс в режиме Задание не имеет значения.
Режим Автомат. При переводе устройства в этот режим с первого выхода блока 7 задания режимов на вторые входы задатчика 3 угловой скорости и задатчика 5 потерь зерна подается потенциал, запрещающий смену информации, при этом в них запоминаются оптимальные значения угловой скорости молотильного барабана и потерь зерна, выбранные оператором в режиме Задание. С второго выхода блока 7 задания режимов на третий вход блока 6 памяти продолжает по- ст т1ать разрещаю1Щ1Й потенциал, который обеспечивает смену текущей информации о фактических потерях в блоке 6 памяти. С третьего выхода блока 7 задания режимов на второй вход исполнительного механизма 14 подается разрешающий потенциал. В первом вычитающем блоке 8 вычисляется разность между значением мгновенной текущей скорости молотильного барабана и заданным значением, хранящимся в задатчике 3 угловой скорости. Во втором вычитающем блоке 9 вычисляется разность между значением текущих потерь и заданным значением потерь, храняпц1мся в задатчике 5 потерь зерна. Сигнал, соответству- разности на выходе второго вычитающего блока 9 имеет р азмерность потерь, например, в процентах, которая приводится нормирующим блоком 13 в единицы, соответствующие угловой скорости молотильного барабана (1/с). Нормирующий коэффи11 1ент для разных типов комбайнов имеет свое значение. Например, для комбайна Нива нормирующий коэффициент равен 0,33. В сумматоре 10 вычисляется результи- РУЮ1ЧИЙ сигнал рассогласования, который отражает как отклонение текущих фактических значений угловой скорости молотильного барабана от заданной, так и отклонение текущих потерь зерна от заданных. При превьщ1ении на выходе сумматора 10 сигналом рассогласования порогового значения происходит включение исполнительного механизма 14, который воздействует на вариатор скорости комбайна,так, что рассогласование уменьшается. При входе технологических режимов в оптимальную зону рассогласование уменьшается до значения
ниже порогового и исполнительный механизм 14 отключается. В зависимости от знака рассогласования исполнительный механизм 1А переводит вариатор на повьппение или на понижение поступательной скорости комбайна„
Режим Переезд. Этот режим сЛу- жит для запоминания послелних перед прерыванием технологического процес- са значений текущих потерь зерна с целью уменьшения времени переходного процесса при возобновлении технологического процесса. В режиме Переезд с первого входа блока 7 зада- ния режимов на вторые входы задатчи- ка 3 угловой скорости и задатчика 5 потерь зерна продолжает поступать потенциал, запрещающий смену информации в этих блоках. С второго выхода блока 7 задания режимов на третий вход блока 6 памяти поступает потенциал, запрещающий обновление значени текущих потерь зерна и в блоке 6 памяти остается последнее перед пре- рыванием технологического процесса значение текущих потерь. С третьего выхода блока 7 задания режимов на второй вход исполнительного механизма 14 подается сигнал, запрещающий его включение. Управление движением комбайна осуществляется вручную. После переезда на новый валок и включении технологического процесса устройство переводится в режим Авто
мат. При этом на второй вход ис
полнительного механизма 14 подается разрешающий автоматическую работу потенциал. На третий вход блока 6 памяти поступает потенциал, который готовит блок 6 памяти к обновлению информации о текущих потерях зерна, но это обновление пока запрещено потенциалом с элемента 12 задержки. В этот момент комбайн начинает движение, как продолжение, движения до перерыва технологического процесса. На вход порогового блока 11 с выхода первого вычитающего блока 8 начинает поступать сигнал рассогласования по угловой скорости молотильного ба- рабана. Пороговое устройство 11 срабатывает при уменьшении входного сигнала, например, до 0,5% от номинальной угловой скорости. В начальный момент при включении технологи- ческого процесса это рассогласование велико и пороговое устройство 11 наg5 0 5 Q
5
5
0 5
ходится в закрытом состоянии. При уменьщении рассогласования до порогового уровня, что происходит через ;1-2 с, пороговый блок 11 вырабатывает сигнал разрешения смены информации по потерям в блоке 6 памяти, который задерживается элементом 12 задержки на время, необходимое для выхода датчика 4 потерь на установившийся режим работы (20-60 с), Далее устройство работает в режиме Автомат.
Фор.мула изобретения
Устройство автоматического регулирования загрузки зерноуборочного комбайна, содержащее датчик и задат- чик угловой скорости молотильного барабана, блок осреднения, датчик потерь зерна и исполнительный механизм, отличающееся тем, что, с целью повышения точности регулирования, оно снабжено первым и вторым вычитаюищми блоками, пороговым блоком, элементом задержки,блоком памяти, сумматором, нормирующим блоком, задатчиком потерь зерна и блоком задания режимов, при этом выход датчика угловой скорости молотильного барабана соединен с первым входом первого вычитающего блока и через блок осреднения - с первым входом задатчика угловой скорости молотильного барабана, второй вход которого соединен с первым выходом блока задания режимов и вторым входом задатчика потерь зерна, а выход соединен с вторым входом первого вычитающего блока, приче.м выход по- с-леднего соединен с первым входом сумматора и первым входом блока памяти через последовательно соединенные пороговый блок и элемент задержки, при этом выход датчика потерь зерна соединен с информационными входами блока памяти и задатчика потерь зерна, выход которого соединен с вторым входом второго вычитающего блока, первый вход которого соединен с выходом блока памяти, а выход- через нормирующий блок с вторым вхо дом сумматора, кроме того второй и третий выходы блока задания режимов соединены соответственно с вторым входом блока памяти и с вторым входом исполнительного механизма, первый вход которого связан с выходом сумматора.
| Авторское свидетельство СССР 841130, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
