Изобретение относится к сельско- тсозяйственному машиностроению, в часности к устройствам автоматического управления сельскохозяйственными машнами.
Известно устройство, в котором в качестве направляклцего элемента управления используются постоянные дорожки с твердым покрытием, проложенные по полю, гфохождении каждого рабочего гона ходовые колеса самоходного шасси передвигаются по указаиньш дорожкам, автоматизация направления движения при этом осуществляется при помощи колес автоводителнй, которые передвигаются по дорожкам впер,еди ходовых колес шасси.
Разворот шасси в конце гона осуществляется после достижения колесами-автоводителями поперечной дорожки, проложенной по границе между полем и разворотнЫ полосой Cl
Недо ст ат камя данного устрой ств а являются большой объем и стоимость работ по оборудованию на полях дорожек с твердым покрытием и поддержанию их в 1ФИГОДНОМ к эксплуатации состоянии. Кроме того, это устройств не обеспечивает возможность работы на поле самоходных шасси, имеющих различную величину поперечной базы, и не обеспечивает полную автоматизацию щ оцесса обработки массива полей, так как при передш1жении шасси между полями, при переводе шасси из транспортного положения в рабочее и из рабочего в транспортное требуeTck участие оператора.
Наиболее близким к предлагаемому является устройство для автоматического уцравления движением самоходного шасси, содержащее электромагнитные щугы, подключенные к электронному блоку угфавления, гибкие элементы и механизм для образования в почве щели Г2 . J-
Однако известное устройство не обеспечивает полную автоматизацию процесса управления агрегатом при обработке отдельного поля и при обработке массива полей, так как при передвижении тракторного агрегата с одного поля на другое и при переводе данного устройства с режима управления по базовому проводу на режим управления по ориентируицему, требуется участие оператора. Кроме того, применение данного устройства
возможно лишь при обработке полей, .имеющих определенную, преимущественно, прямоугольную с закругленными углами конфигурацию границ.
Цель изобретения - повышение уровня автоматизации процесса управления устройством.
Поставленная цель достигается тем, что предлагаемое устройство снабжено подвижными элементами,приводными барабанами с гибкими элементами, приводами вращения барабанов, датчиками угла поворота, якорями, поемными механизмами, стопорящими механизмами, датчиками углового положения, частотными селекторами, при этом механизм для образования в почве щели выполнен в виде размещенного в плоскости ходовых колес вертикального ножа, на каждой из рамок шасси в центре и по бокам установлены элекромагнитные щупы, причем центральный щуп подключен к электронному блоку управления через частотный селектор, а боковые подключены к электронному блоку управления, при этом на свободном конце гибкого элемента закреплен якорь, при этом гибкий элемент пропущен через вертикальный канал подвижного элемента, установленного на вертикальном ноже с возможностью поворота относительно него вокруг лежащей в плоскости ножа горизонтальной оси, кроме того, на Hori же установлены датчик угла поворота, который механически соединен с подвижным элементом и подключен к электронному блоку управления, и стопорящи2| механизм для фиксации подвижного элемента относительно ножа, каждой из ножей смонтирован на рамке посредством подъемного механизм
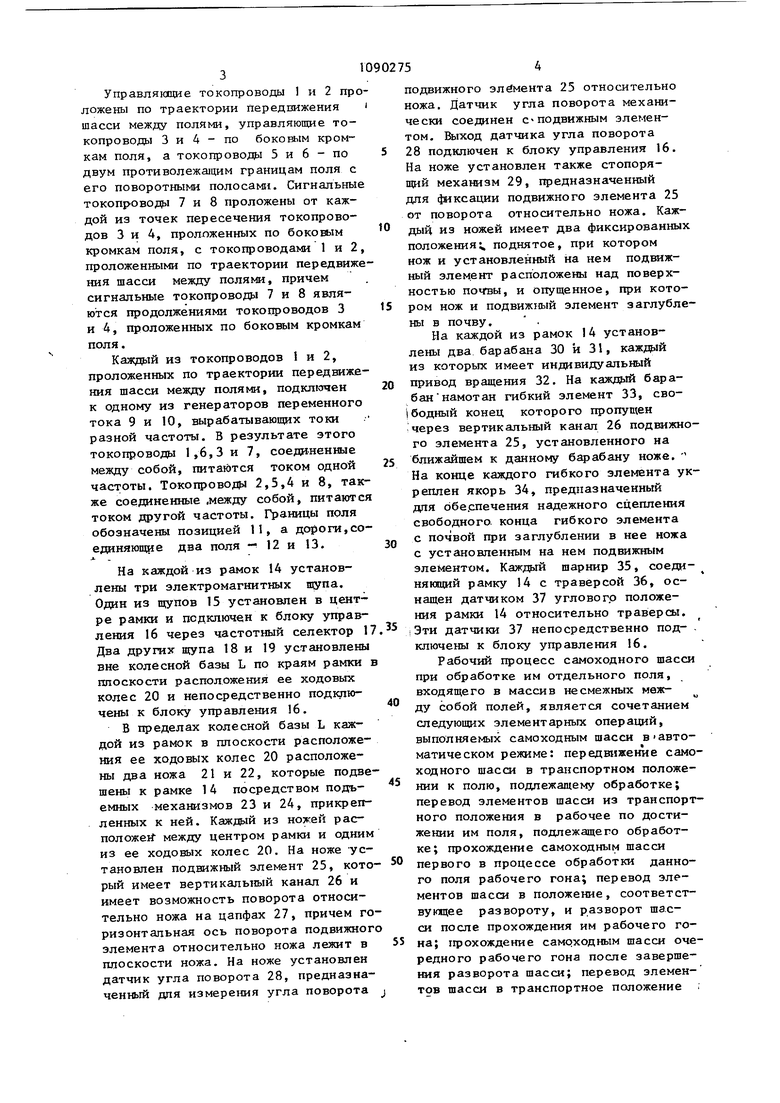
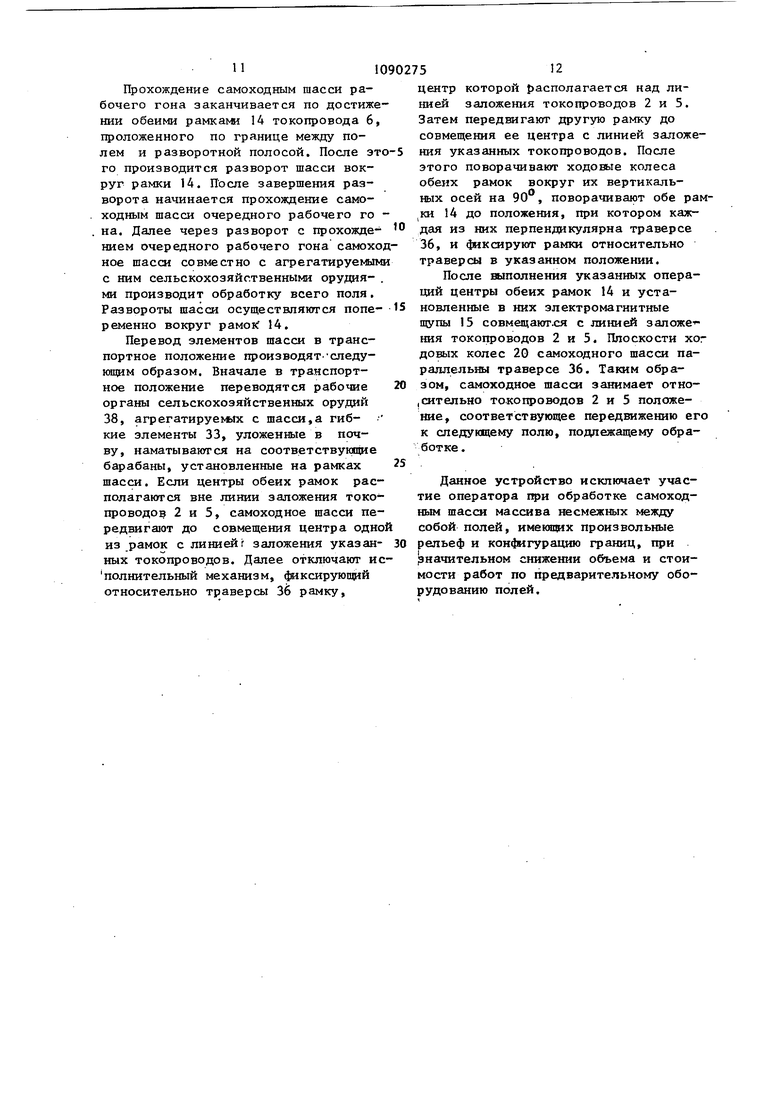
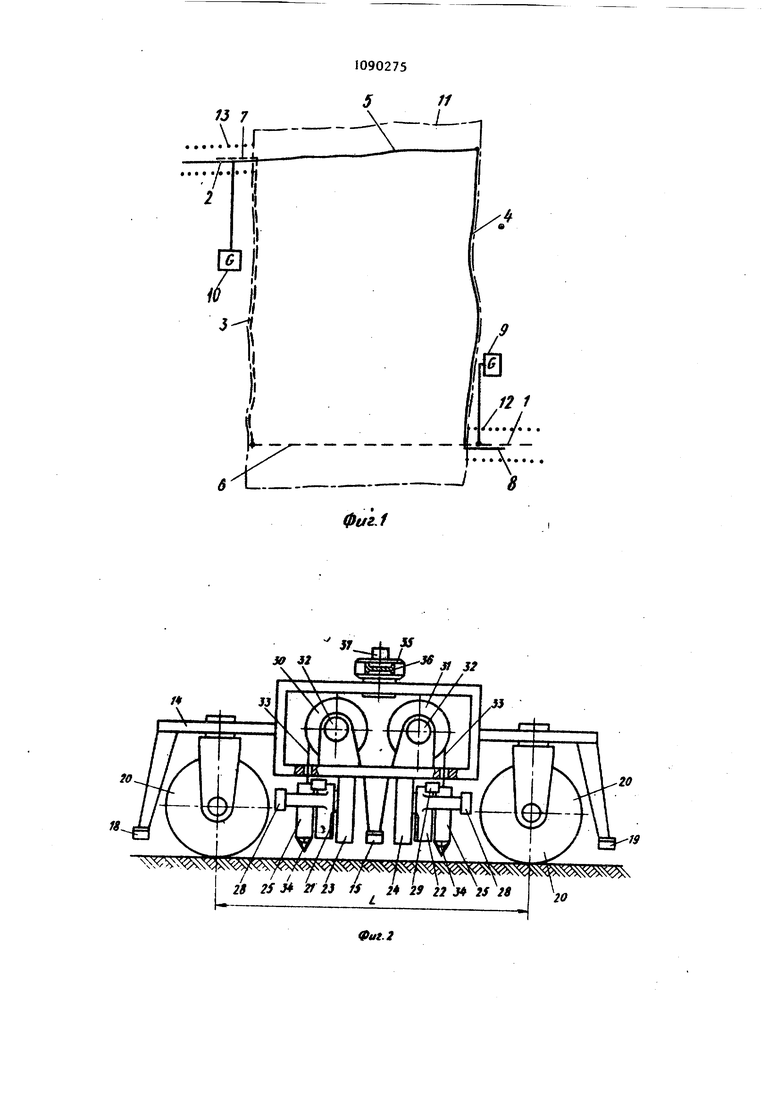
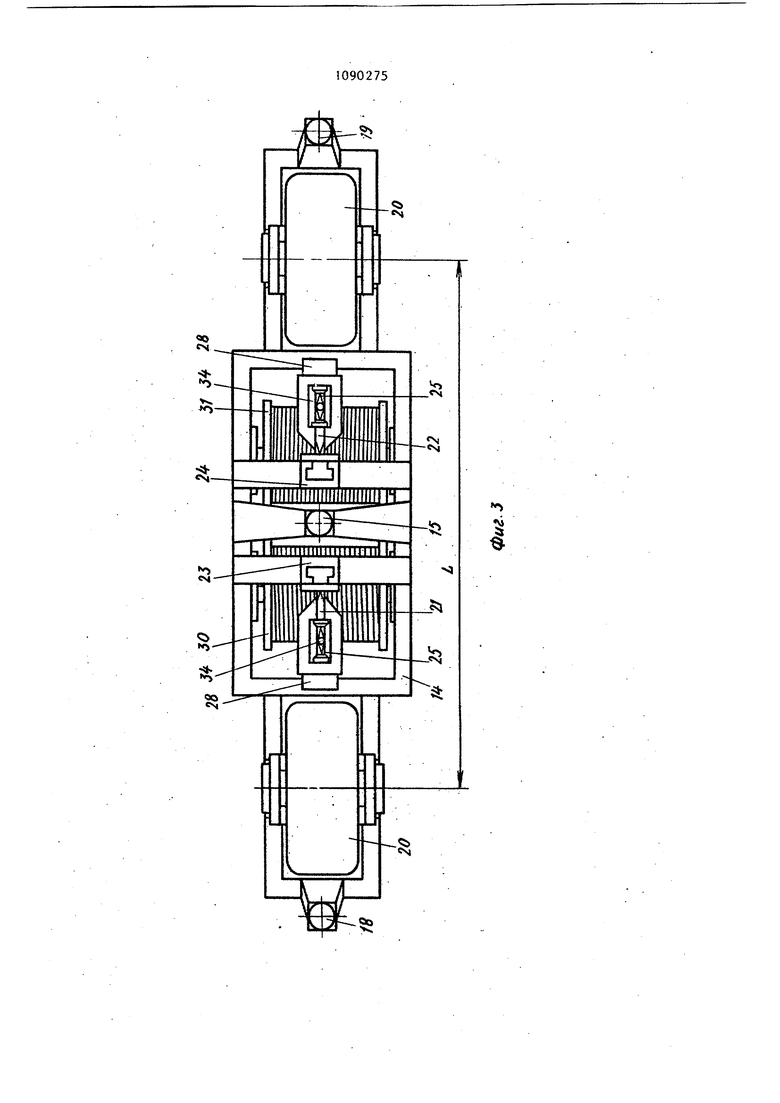
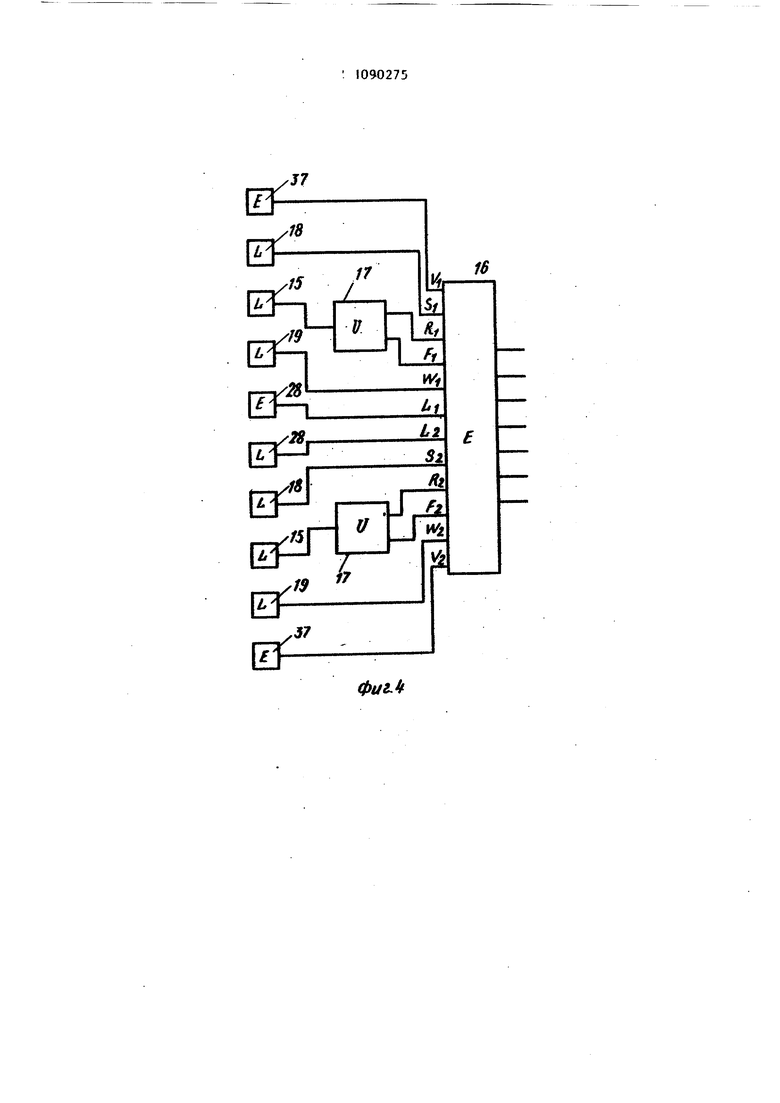
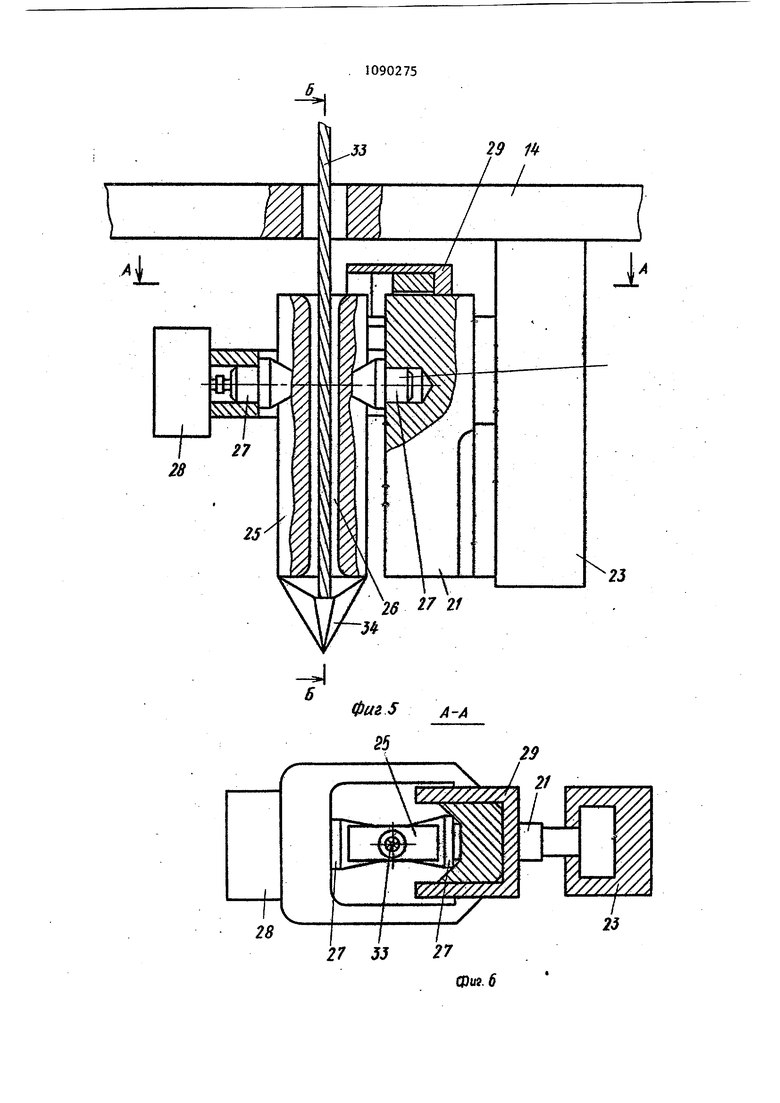
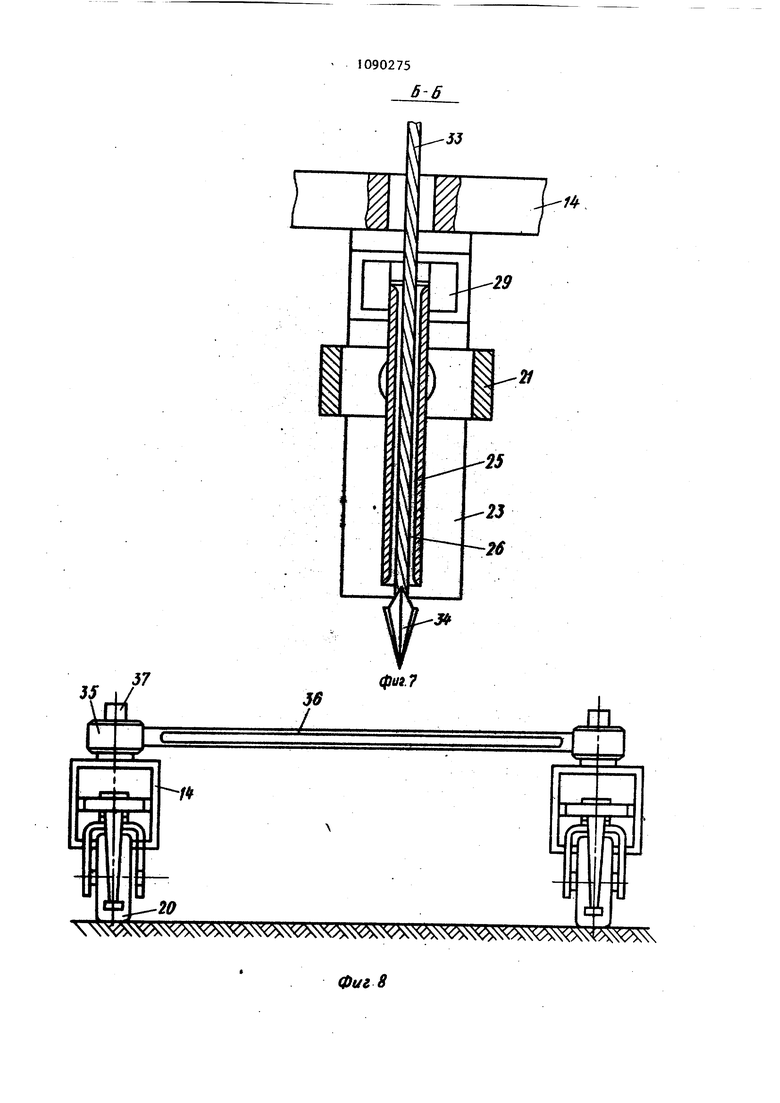
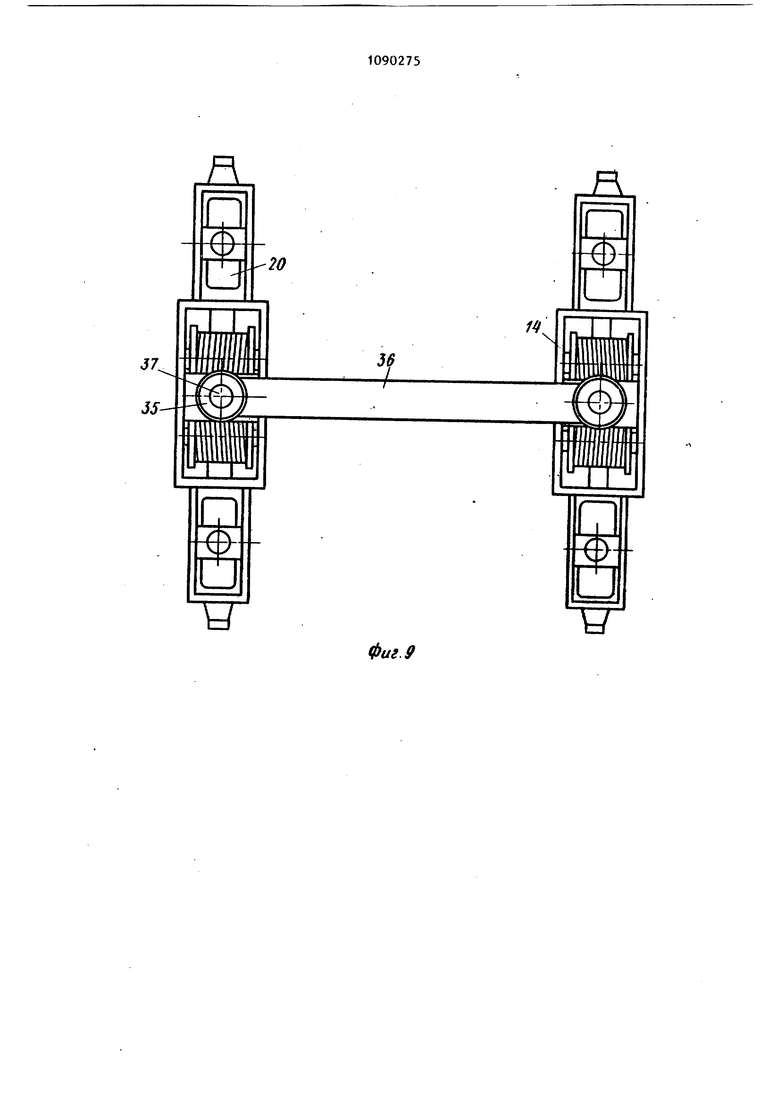
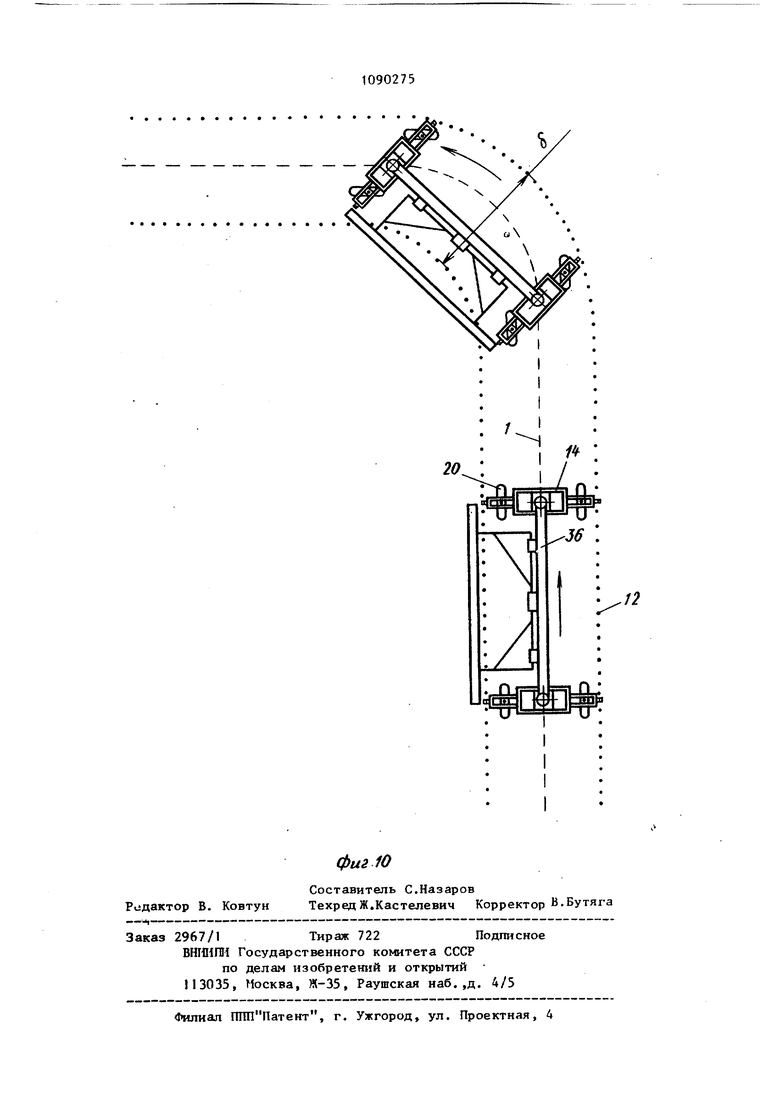
На (}иг.1 изображена схема заложения токоцроводов; на фиг.2 - расположение элементов на рамке, вид сбоку; на фиг.З - то же, вид сверху; на фиг.4 - схема подключения чувствительных элементов устройства к блоку управления; на фиг.5 - нож с подъемным механизмом; на 4иг.6 - то же, разрез А-А на фиг.5; на фяг.1 то . же, разрез по Б-Б на 4иг.5; на фиг.8располсхкение датчика углового положения, вид сзади; на 4«r.9 - то же, вид сверху; на фиг. 10 - расположение элементов шасси относительна токопровода при передвижении устройства по полю. Управляквдие токопроводы 1 и 2 про ложены по траектории передвижения шасси между полями, управляющие токопроводы 3 и 4 - по боковым кромкам поля, а токопроводы 5 и 6 - по двум противолежа1цим границам поля с его поворотными полосами. Сигнальные токопроводы 7 и 8 проложены от каждой из точек пересечения токопроводов 3 и 4, проложенных по боковым кромкам поля, с токощ оводами 1 и 2 проложенными по траектории передвиже ния шасси между полями, причем сигнальные токопроводы 7 и 8 являются продолжениями токоироводов 3 и 4, проложенных по боковым кромкам поля. Каждый из токопроводов 1 и 2, проложенных по траектории передвиже ния шасси между полями, подключен к одному из генераторов переменного тока 9 и 10, вырабатывающих токи разной частоты. В результате этого токопроводы 1,6,3 и 7, соединенные между собой, питаются током одной частоты. Токопроводы 2,5,4 и 8, так же соединенные .между собой, питаютс током другой частоты. Границы поля обозначены позицией 11, а дорога,со единяющие два поля - 12 и 13. А На каждой из рамок 14 установлены три электромагнитных шупа. Один из щупов 15 установлен в центре рамки и подключен к блоку управления 16 через частотный селектор 1
Два других щупа 18 и 19 установлены вне колесной базы L по краям рамки в ппоскости расположения ее ходовых колес 20 и непосредственно подключены к блоку управления 16.
В пределах колесной базы L каждой из рамок в ппоскости расположения ее ходовых колес 20 расположены два ножа 21 и 22, которые подвешены к рамке 1 4 посредством пода емных механизмов 23 и 24, прикрепленных к ней. Каждый из ножей распол ожей между центром рамки и одним из ее ходовых колес 20. На ноже установлен подвижный элемент 25, который имеет вертикальный канал 26 и имеет возможность поворота относительно ножа на цапфах 27, причем горизонтальная ось поворота подвижного элемента относительно ножа лежит в плоскости ножа. На ноже установлен датчик угла поворота 28, предназначенный для измерения угла поворота
ключены к блоку управления 16.
Рабочий процесс самоходного шасси при обработке им отдельного поля, входящего в массив несмежных меж-
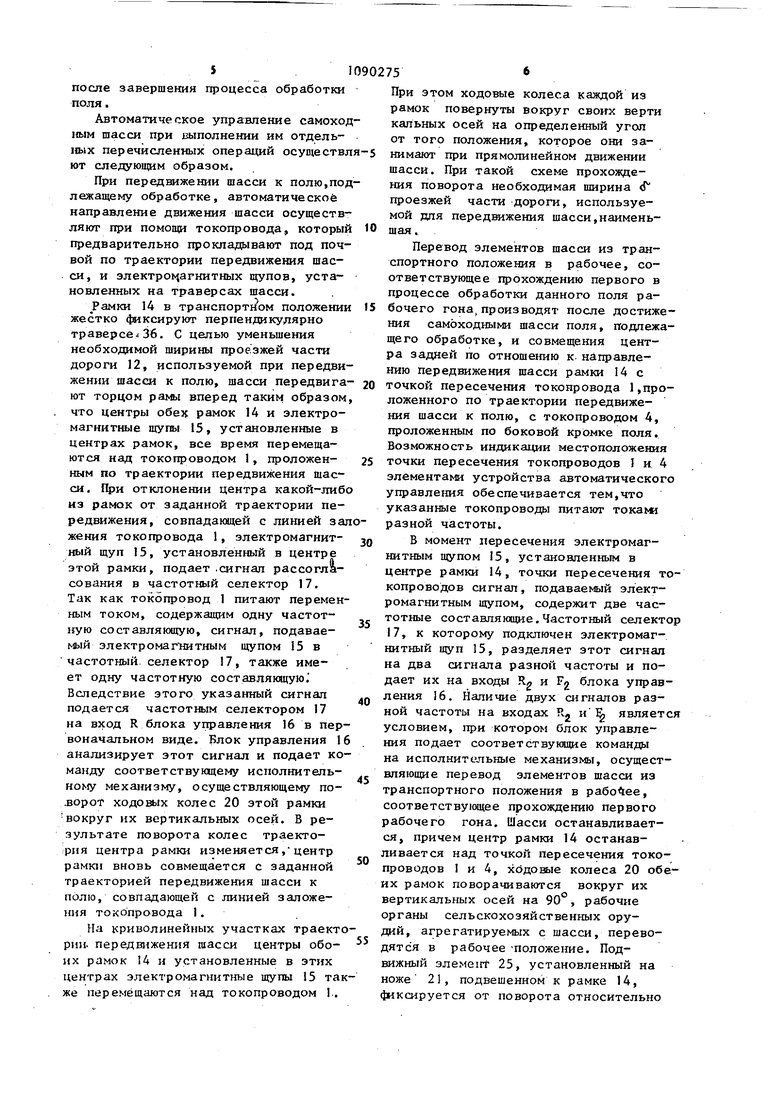
U
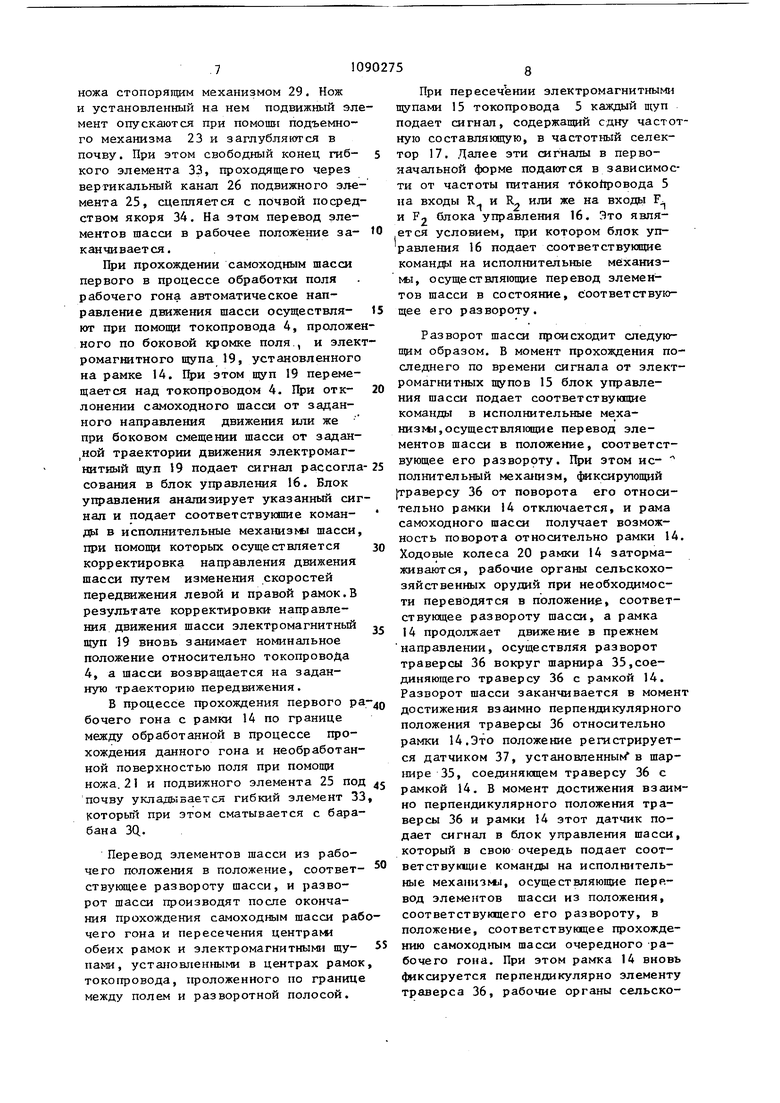
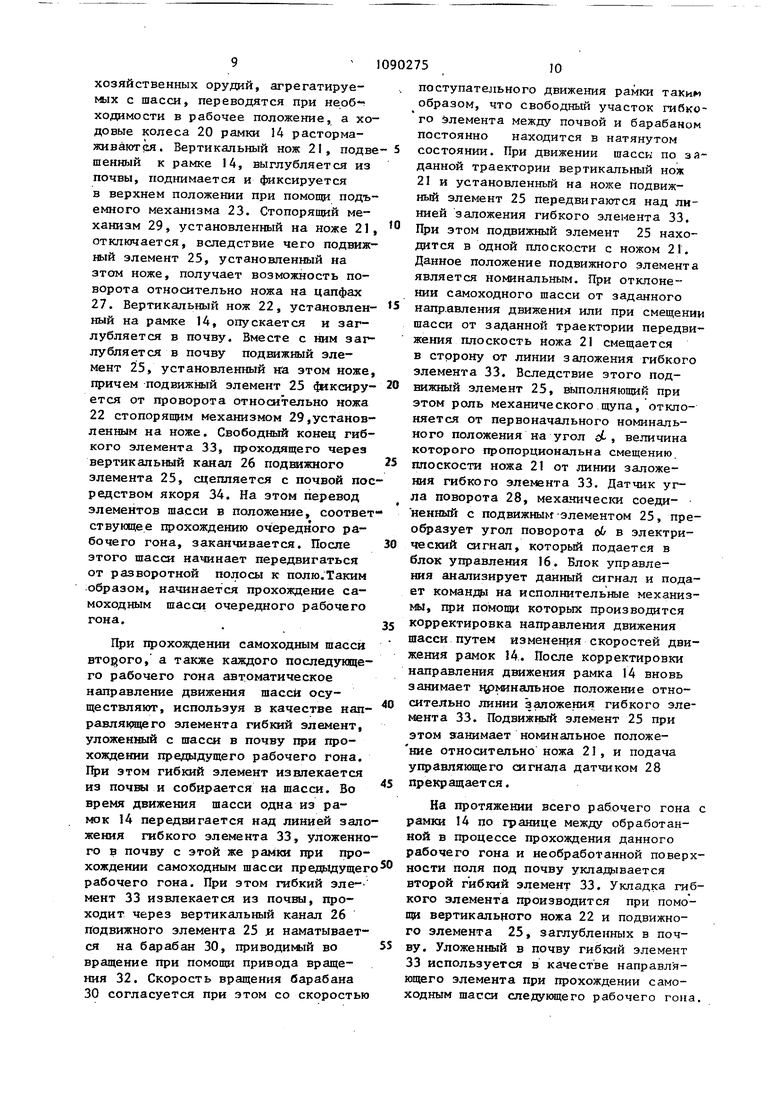
ду собой полей, является сочетанием следующих элементарных операций, выполняемых самоходным шасси в«автоматическом режиме: передвижение самоходного шасси в транспортном положении к полю, подлежащему обработке; перевод элементов шасси из транспортного положения в рабочее по достижении им поля, подлежащего обработке; прохождение самоходным шасси первого в процессе обработки данного поля рабочего гона; перевод элементов шасси в положение, соответствующее развороту, и разворот шасси после прохождения им рабочего гона; прохождение самоходным шасси очередного рабочего гона после завершения разворота шасси; перевод элементов шасси в транспортное положение подвижного элемента 25 относительно ножа. Датчик угла поворота механически соединен с-подвижным элементом. Выход датчика угла поворота 28 подключен к блоку управления 16. На ноже установлен также стопорящий механизм 29, предназначенный для (фиксации подвижного элемента 25 от поворота относительно ножа. Каждый из ножей имеет два фиксированных положения поднятое, при котором нож и установленный на нем подвижный элемент расположены над поверхностью почвы, и опущенное, при котором нож и подвижный элемент заглублены в почву. . На каждой из рамок 14 установлены два барабана 30 и 31, каждый из которых имеет индивидуальный привод вращения 32. На каждый барабан намотан гибкий элемент 33, свободный конец которого пропущен через вертикальный канал 26 подвижного элемента 25, установленного на ближайшем к данному барабану ноже. На конце каждого гибкого элемента укреплен якорь 34, предназначенный для оберпечения надежного сцепления свободного, конца гибкого элемента с почвой при заглублении в нее ножа с установленным на нем подвижным элементом. Каждый шарнир 35, соединяющий рамку 14 с траверсой 36, оснащен датчиком 37 углового положения рамки 14 относительно траверсы. Эти датчики 37 непосредственно под- . S10 после завершения процесса обработки °ля. Автоматическое управление самоходным шасси при выполнении им отдельиых перечисленных операций осуществля ют следующим образом. При передвижении шасси к полю,подлежащему обработке, автоматическое направление движения шасси осуществляют при помощи токопровода, который предварительно прокладывают под почвой по траектории передвижения шасси, и электрог агнитных щупов, установленных на траверсах шасси. Рамки 14 в транспортном положении жестко фиксируют перпендикулярно траверсе.36. С цепью уменьшения необходимой ширины проезжей части дороги 12, используемой при передвижеНИИ шасси к полю, шасси передвигают торцом patibi вперед таким образом, что центры обех рамок 14 и электромагнитные щупы 15, установленные в центрах рамок, все время перемещаются над токопроводом 1, проложенным по траектории передвижения шасси, При отклонении центра какой-либо из рамок от заданной траектории передвижения, совпадающей с линией зало- разной частоты. жения токопровода 1, электромагнитный щуп 15, установленный в центре этой рамки, подает .сигнал рассогласования в частотный селектор 17. Так как токопровод 1 питают перемен ным током, содержащим одну частотную составляющую, сигнал, подаваемый электромагнитным щупом 5 в частотный селектор 17, также имеет одну частотную составляющую. Вследствие этого указанный сигнал подается частотным селектором 17 на вход R блока управления 16 в пер воначальном виде. Блок управления 1 анализирует этот сигнал и подает ко манду соответствующему исполнительному механизму, осуществляющему по.ворот ходовых колес 20 этой рамки вокруг их вертикальных осей. В результате поворота колес траектория центра рамки изменяется,-центр рамки вновь совмещается с заданной траекторией передвижения шасси к полю, совпадающей с линией заложения токопровода 1. На криволинейных участках траект рии- передвижения шасси центры обоих рамок 14 и установленные в этих центрах электромагнитные щупы 15 та же перемещаются над токопроводом 1.. 756 При этом ходовые колеса каждой из рамок повернуты вокруг своих верти кальных осей на определенный угол от того положения, которое они занимают при прямолинейном движении шасси. При такой схеме прохождения поворота необходимая ширина «Г проезжей части дороги, используемой для передвижения шасси,наименьшая . Перевод элементов шасси из транспортного положения в рабочее, соответствующее прохождению первого в процессе обработки данного поля рабочего гона,производят после достиже«ия самоходными шасси поля, подпежащего обработке, и совмещения центра задней по отношегаю к. направле„ию передвижения шасси рамки 14 с точкой пересечения токопровода 1,проложенного по траектории передвижения шасси к полю, с токопроводом 4, проложенным по боковой кромке поля. Возможность индикации местоположения точки пересечения токопроводов 1 и 4 элементами устройства автоматического управления обеспечивается тем,что указанные токопроводы питают В момент пересечения электромагнитным щупом 15, установленным в центре рамки 14, точки пересечения токопроводов сигнал, подаваемый электромагнитным щупом, содержит две частотные составляющие.Частотный селектор 17, к которому подключен электромагнитный щуп 15, разделяет этот сигнал на два сигнала разной частоты и подает их на входы Re и р2 блока управления 16. Наличие двух сигналов разной частоты на входах Rj, и является условием, при котором блок управления подает соответствующие команды на исполнительные механизмы, осуществляющие перевод элементов шасси из транспортного положения в , соответствукнцее прохождению первого рабочего гона. Шасси останавливается, причем центр рамки 14 останавливается над точкой пересечения токопроводов I и 4, ходовые колеса 20 обеих рамок поворачиваются вокруг их вертикальных осей на 90 , рабочие органы сельскохозяйственных орудий, агрегатируемых с шасси, переводятся в рабочее положение. Подвижный элемешг 25, установленный на ноже 21, подвешенном к рамке 14, фиксируется от поворота относительно ножа стопоря1цим механизмом 29. Нож и установленный на нем подвижный эл мент опускаются при помощи подъемного механизма 23 и заглубляются в почву. При этом свободный конец гибкого элемента 33, проходящего через вертикальный канал 26 подвижного эле мента 25, сцепляется с почвой посред ством якоря 34. На этом перевод элементов шасси в рабочее положение заканчивается. При прохождении самоходным шасси первого в процессе обработки поля рабочего гона автоматическое направление движения шасси осуществляют при помощи токопровода 4, проложе ного по боковой кромке поля , и элек ромагнитного щупа 19, установленного на рамке 14. При этом щуп 19 перемещается над токопроводом 4. При отклонении самоходного шасся от заданного направления движения или же при боковом смещении шасси от задан ной траектории движения электромагнитный щуп 19 подает сигнал рассогла сования в блок управления 16. Блок управления анализирует указанный сиг нал и подает соответствующие команда в исполнительные механизм шасси при помощи которых осуществляется корректировка направления движения шасси путем изменения скоростей передвижения левой и правой рамок.В результате корректировки направления движения шасси электромагнитный щуп 19 вновь занимает номинальное положение относительно токопровоДа 4, а шасси возвращается на заданную траекторию передвижения. В процессе прохождения первого p бочего гона с рамки 14 по границе между обработанной в процессе прохождения данного гона и необработанной поверхностью поля при помощи тс подвижного элемента 25 под ножа. 21 и почву уклаль1Бается гибкий элемент 3 которьй при этом сматывается с барабана 3Q.. Перевод элементов шасси из рабочего положения в положение, соответствующее развороту шасси, и разворот шасси производят после окончания прохождения самоходным шасси раб чего гона и пересечения центрами обеих рамок и электромагнитными щупани, установленными в центрах рамок токопровода, проложенного по границе между полем и разворотной полосой. При пересечении электромагнитными щупами 15 токопровода 5 каждый щуп подает сигнал, содержащий сдну частотную составляющую, в частотный селектор 17, Далее эти сигналы в первоначальной форме подаются в зависимости от частоты питания тбко1фовода 5 на входы R и R или же на входы F.; и F2 блока управления 16. Это является условием, пр.и котором блок управления 16 подает соответствующие команды на исполнительные механизNbi, осуществляющие перевод элементов шасси в состояние, соответствующее его развороту. Разворот шасси происходит следующим образом. В момент прохождения последнего по времени сигнала от электромагнитных щупов 15 блок управления шасси подает соответствугацие команды в исполнительные механизг,осуществляющие перевод элементов шасси в положение, соответствующее его развороту. При этом ис- полнительный механизм, фиксирующий траверсу 36 от поворота его относительно рамки 14 отключается, и рама самоходного шасси получает возможность поворота относительно рамки 14. Ходовые колеса 20 рамки 14 затормаживаются, рабочие органы сельскохозяйственных орудий при необходимости переводятся в положение, соответствующее развороту шасси, а рамка 14 продолжает движение в прежнем направлении, осуществляя разворот траверсы 36 вокруг шарнира 35,соединяющего траверсу 36 с рамкой 14. Разворот шасси заканчивается в момент достижения взаимно перпендикулярного положения траверсы 36 относительно рамки 14.Это положение регистрируется датчиком 37, установленныг в шарнире 35, соединяющем траверсу 36 с - i / « рамкой 14. В момент достижения взаимно перпендикулярного положения траверсы 36 и рамки 14 этот датчик подает сигнал в блок управления шасси, который в свою очередь подает соответствукщие команды на исполнительные механиз, осуществляющие перевод элементов шасси из положения, соответствугацего его развороту, в положение, соответствуюцее прохождению самоходным шасси очередного рабочего гона. При этом рамка 14 вновь фиксируется перпендикулярно элементу траверса 36, рабочие органы сельскохозяйственных орудий, агрегатируемых с шасси, переводятся при нерб ходимости в рабочее положение, а ходовые колеса 20 рамки 14 растормаживаютсш. Вертикальный нож 21, подве шенный к рамке 14, выглубляется из почвы, поднимается и фиксируется в верхнем положении при помощи подъемного механизма 23. Стопорящий механизм 29, установленный на ноже 21 отключается, вследствие чего подвижный элемент 25, установленный на этом ноже, получает возможность поворота относительно ножа на цапфах 27. Вертикальный нож 22, установленный на рамке 14, опускается и заглубляется в почву. Вместе с ним заглубляется в почву подвижный элемент 25, установленный на этом ноже гфичем подвижный элемент 25 фиксируется от проворота относительно ножа 22 стопорящим механизмом 29,установленным на ноже. Свободный конец гибкого элемента 33, проходящего через вертикальный канал 26 подвижного элемента 25, сцепляется с почвой пос редством якоря 34. На этом перевод элементов шасси в положение, соответ ствующее прохождению очередного рабочего гона, заканчивается. После этого шасси начинает передвигаться от разворотной полосы к полю.Таким .образом, начинается прохождение самоходным шасси очередного рабочего гона. При прохождении самоходным шасси второго, а также каждого последующего рабочего гона автоматическое направление движения шасси осуществляют, используя в качестве направлякнцего элемента гибкий элемент, уложенный с шасси в почву при прохождении предыдущего рабочего гона. При этом гибкий элемент извлекается из почта) и собирается на щасси. Во время движения шасси одна из рамок 14 передвигается над линией зало жения гибкого элемента 33, уложенно го в почву с этой же рамки при прохождении самоходным шасси предыдущег рабочего гона. При этом гибкий эле- мент 33 извлекается из почвы, проходит через вертикальный канал 26 подвижного элемента 25 и наматьгвается на барабан 30, приводимый во вращение при помопщ привода вращения 32. Скорость вращения барабана 30 согласуется при этом со скоростью поступательного движения рамки таки образом, что свободный участок гибкого Элемента между почвой и барабаном постоянно находится в натянутом состоянии. При движении щассь по заданной траектории вертикальный нож 21 и установленный на ноже подвижный элемент 25 передвигаются над линией заложения гибкого элемента 33. При этом подвижный элемент 25 находится в одной плоско.сти с ножом 21. Данное положение подвижного элемента является номинальным. При отклонении самоходного щасси от заданного направления движения или при смещении щасси от заданной траектории передвижения плоскость ножа 21 смещается в сторону от линии заложения гибкого элемента 33. Вследствие этого подвижный элемент 25, выполняющий при этом роль механического щупа, отклоняется от первоначального номинального положения на угол at, величина которого пропорциональна смещению, плоскости ножа 21 от линии заложения гибкого элемента 33. Датчик угла поворота 28, механически соединенный с подвижным Элементом 25, преобразует угол поворота об в электрический сигнал, который подается в блок управления 16. Блок управления анализирует данный сигнал и подает команды на исполнительные механизмы, при помощи которых производится корректировка направления движения шасси путем изменения скоростей движения рамок 14. После корректировки направления движения рамка 14 вновь занимает 1фминальное положение относительно линии заложения гибкого элемента 33. Подвижный элемент 25 при этом занимает номинальное положение относительно ножа 21, и подача управлякнцего сигнала датчиком 28 прекр ащает ся. На протяжении всего рабочего гона с рамки 14 по границе между обработанной в процессе прохождения данного рабочего гона и необработанной поверхности поля под почву укладывается второй гибкий элемент 33. Укладка гибкого элемента производится при помощи вертикального ножа 22 и подвижного элемента 25, заглубленных в почву. Уложенный в почву гибкий элемент 33 используется в качестве направляющего элемента при прохождении самоходным шасси следукнцего рабочего гона.
Прохождение самоходным шасси рабочего гона заканчивается по достижении обеими рамками 14 токопровода 6, проложенного по границе между полем и разворотной полосой. После это го производится разворот шасси вокруг рамки 14. После завершения разворота начинается прохождение самоходным шасси очередного рабочего го на. Далее через разворот с прохождением очередного рабочего гона самоходное шасси совместно с агрeraтируемыми с ним сельскохозяйственными орудия- . ми производит обработку всего поля. Развороты шасси осуществяямпгся попеременно вокруг рамок: 14.
Перевод элементов шасси в транспортное положение производят-следующим образом. Вначале в транспортное положение переводятся рабочие органы сельскохозяйственных орудий 38, агрегатируе 1х с шасси,а гибкие элементы 33, уложенные в почву, наматываются на соответствукщие барабаны, установленные на рамках шасси. Если центры обеих рамок располагаются вне линии заложения токопроводов 2 и 5, самоходное шасси передвигают до совмещения центра одной из рамок с линией г заложения указанных токопроводов. Далее отключают исполнительный механизм, фиксирующий относительно траверсы 36 рамку.
центр которой располагается над линией заложения токопроводов 2 и 5. Затем передвигают другую рамку до совмещения ее центра с линией заложения указанных токопроводов. После этого поворачивают ходовые колеса обеих рамок вокруг их вертикальных осей на 90, поворачивают обе ра,ки 14 до положения, при котором каждая из них перпендикулярна траверсе 36, и фиксируют рамки относительно траверсы в указанном положении.
После выполнения указанных операций центры обеих рамок 14 и установленные в них электромагнитные щупы 15 совмещают.ся с линией запожения токопроводов 2 и 5. Плоскости хо довых колес 20 самоходного шасси параллельны траверсе 36. Таким образом, самоходное шасси занимает отно|Сительно токопроводов 2 и 5 положение, соответствующее передвижению ег к следующему полю, подлежащему обработке.
Данное устройство исключает участие оператора при обработке самоходным шасси массива несмежных меткду собой полей, имегадах произвольные рельеф и кон(|мгурацию границ, при значительном снижении объема и стоимости работ по предварительному оборудованию полей.
i6 I
J-1
//
I.
12 1
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОХОДНОЕ ШАССЙ | 1972 |
|
SU430813A1 |
| "Самоходное шасси | 1979 |
|
SU843798A1 |
| Мини-агрегат для сельскохозяйственных работ | 1982 |
|
SU1055361A1 |
| АГРЕГАТ С КАНАТНОЙ ТЯГОЙ ДЛЯ СЕЛЬСКОХОЗЯЙСТВЕННЫХ И МЕЛИОРАТИВНЫХ РАБОТ | 1992 |
|
RU2050078C1 |
| АГРОПРОМЫШЛЕННЫЙ АГРЕГАТ | 2005 |
|
RU2289900C1 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ АГРЕГАТ | 1990 |
|
RU2032294C1 |
| Мостовой агрегат для сельскохозяйственных работ | 1990 |
|
SU1709936A1 |
| РУЛЕВАЯ СИСТЕМА АГРОМОБИЛЬНОГО АГРЕГАТА | 2015 |
|
RU2582738C2 |
| Капустоуборочный комбайн | 1979 |
|
SU1037868A1 |
| Машина для обработки почвы в рядах между виноградными кустами | 1960 |
|
SU131565A1 |
УСТРОЙСТВО ДПЯ АВТОМАТИЧЕСМОГО УПРАВПЕШ1Я ДВИЖЕНИЕМ САШХОда01ГО ШАСШ, содержащее раму с колесами, на которой смонтированы электромагнитные щупы, подключенные к электронному блоку управления, гибкие элементы и механизм для образования в почве щели, отличающееся тем, что, с целью повышения уровня автоматизации процесса управления устройством, оно снабжено подвижными элементаю, приводными барабанами с гибкими элементами, приводами вращения барабанов, датчиками угла поворота, якорями, поп:ьемны фс механизмами, стопорящими механизмами, датчиками углового положения, частотнь1ми селекторами, а рама выполнена в виде рамок, шарнирно соединенных.между собой траверсой, при этом механизм для образования в почве щели выполнен в виде размещенного в плоскости ходовых колес вертикального ножа, на каждой из рамок шасси в центре и по бокам установлены электромагнитные щупы,причем центральный щуп подключен к электронному блоку управления через частотный селектор, а боковые подключены к электронному блоку управления, при этом на свободном конце гибкого элемента закреплен якорь, который пропущен через вертикальный канал подвижно(О го элемента, установленного на вертикальном ноже с возможностью повоС рота относительно него вокруг лежащей в плоскости ножа горизонтальной оси, кроме того на ноже установлены датчик угла поворота, который механически соединен с подвижным элементом и подключен к электронному блоку управления, и стопорящий механизм для фиксации подвижного элемента относительно ножа, каждлй из ножей смонтирован на рамке посредством подьемного механизма.
J7
18
te
И&
i fi
2В
-28.
Wi
AL
37
фиг. 6
фиг S
PL
П
20
Фиг.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| САМОХОДНОЕ ШАССЙ | 1972 |
|
SU430813A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
