Изобретение относится к области автоматической обработки изображений и распознавания образов и может быть применено в системах, использующих анализ графических изображений, например в читающих устройствах.
Целью изобретения является повышение точности работы устройства за счет инвариантности преобразования и нормализации распознаваемых изображений.
На фиг,1, 2 представлены блок-схемы устройства; на фиг.З, 4 - результаты работы узлов устройства; на фиг о5 - принцип определения координат изображения; на фиг.6,7 - блок- схемы алгоритмов работы устройства.
Устройство для распознавания гра- ,фических изображений (фиг) состоит из последовательно соединенных оп- тоэлектронного блока 1 ввода изображений, блока 2 памяти изображений, блока 3 анализа изображений, блока 4 инвариантного преобразования изображений, классификатора 5, а также блока 6 определения коордиант и размеров изображений, которого под- соединен к выходу блока I, а выход - к управляющему входу блока 4.
Блок инвариантного преобразования изображений фиг«2 содержит арифметико-логический блок 7, первый блок 8 памяти (промежуточную память ), второй блок 9 памяти (память результаСП
о
00
tc ел ел
тов), блок 10 синхронизации, причем один вход арифметико-логического блока 7 подсоединен к выходу блока 3 анализа изображений, а другой его вход соединен с выходом первого блока 8 памяти, выход второго блока 9 памяти соединен с входом классификатора 5, вход запуска блока 10 синхронизации подключен к выходу блока 6, а его выходы подключены соответственно к управляющему входу арифметико- логического блока 7 и адресным входам управления записью блоков 8, 9 памяти.. .
На..фиг„3 показано поле исходного изображения 11 и поля анализа 12с,
На фиг о 4 показаны поля исходного изображения 13 с подобно преобразованными, изображениями и примеры полей анализа 14 с разделением их на области локальной обработки
На фиг.5 показаны оси координат на поле исходного изображения, а также начальные и конечные координаты, соответствующие граничным точкам изображения.
Блок определения координат и размеров изображений может быть выполнен на основе универсального микропроцес- сора,, Алгоритм его функционирования представлен на фиг об„
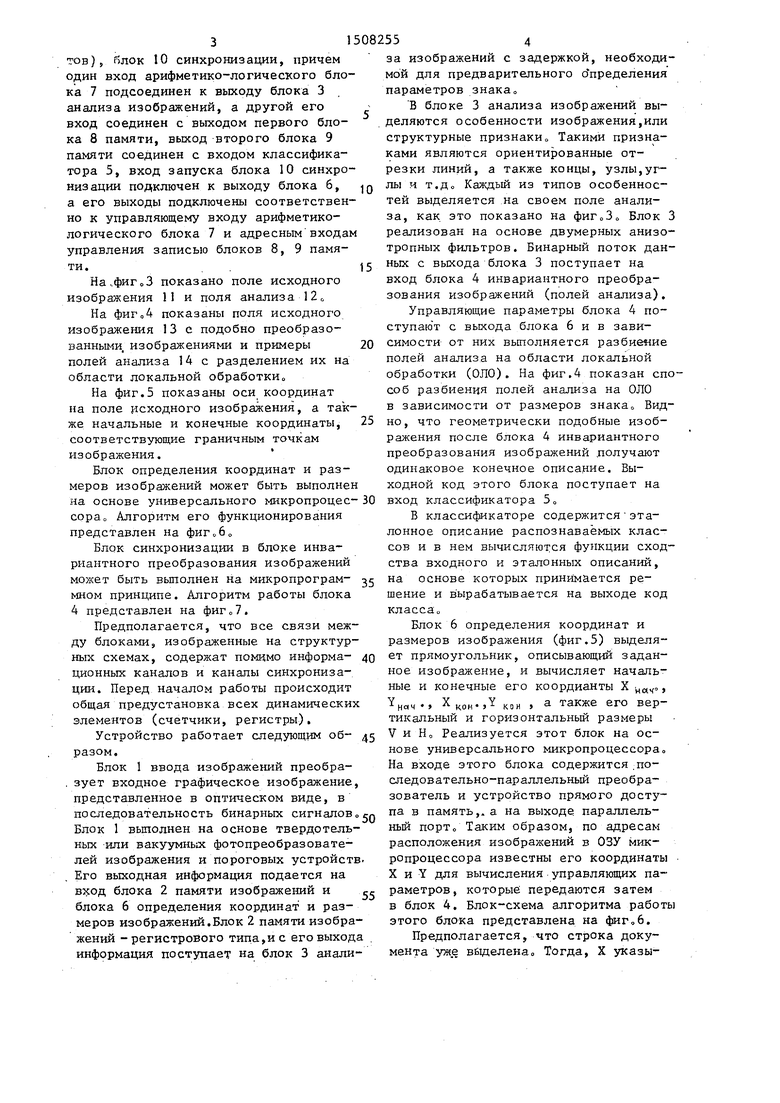
Блок синхронизации в блоке инвариантного преобразования изображений может быть выполнен на микропрограм- мном принципе. Алгоритм работы блока 4 представлен на фиг о 7.
Предполагается, что все связи между блоками, изображенные на структурных схемах, содержат помимо информа- ционных каналов и каналы синхронизации. Перед началом работы происходит общая предустановка всех динамически элементов (счетчики, регистры).
Устройство работает следующим об- разом.
Блок 1 ввода изображений преобра- . зует входное графическое изображение представленное в оптическом виде, в
за изображений с задержкой, необходимой для предварительного о пределения параметров знака
В блоке 3 анализа изображений выделяются особенности изображения,или структурные признаки Такими признаками являются ориентированные отрезки линий, а также концы, узлы,углы и т.До Каждый из типов особенностей выделяется на своем поле анализа, как это показано на фиГоЗ Блок реализован на основе двумерных анизотропных фильтров. Бинарный поток данных с выхода блока 3 поступает на вход блока 4 инвариантного преобразования изображений (полей анализа).
Управляющие параметры блока 4 по- ступаю т с выхода блока бив зависимости от них выполняется разбиение полей анализа на области локальной обработки (ОЛО). На фиг.4 показан спсоб разбиения полей анализа на ОЛО в зависимости от размеров знака Видно, что геометрически подобные изображения после блока 4 инвариантного преобразования изображений .получают одинаковое конечное описание. Выходной код этого блока поступает на вход классификатора 5
В классификаторе содержитсяэталонное описание распознаваемых классов и в нем вычисляются функции сходства входного и эталонных описаний, на основе которых принимается решение и вырабатывается на выходе код класса
Блок 6 определения координат и размеров изображения (фиг.5) выделяет прямоугольник, описывающий заданное изображение, и вычисляет начальные и конечные его коордианты X цач
нач
X
..,Y
а также его вертикальный и горизонтальный размеры V и Но Реализуется этот блок на основе универсального микропроцессора На входе этого блока содержится.последовательно-параллельный преобразователь и устройство прямого досту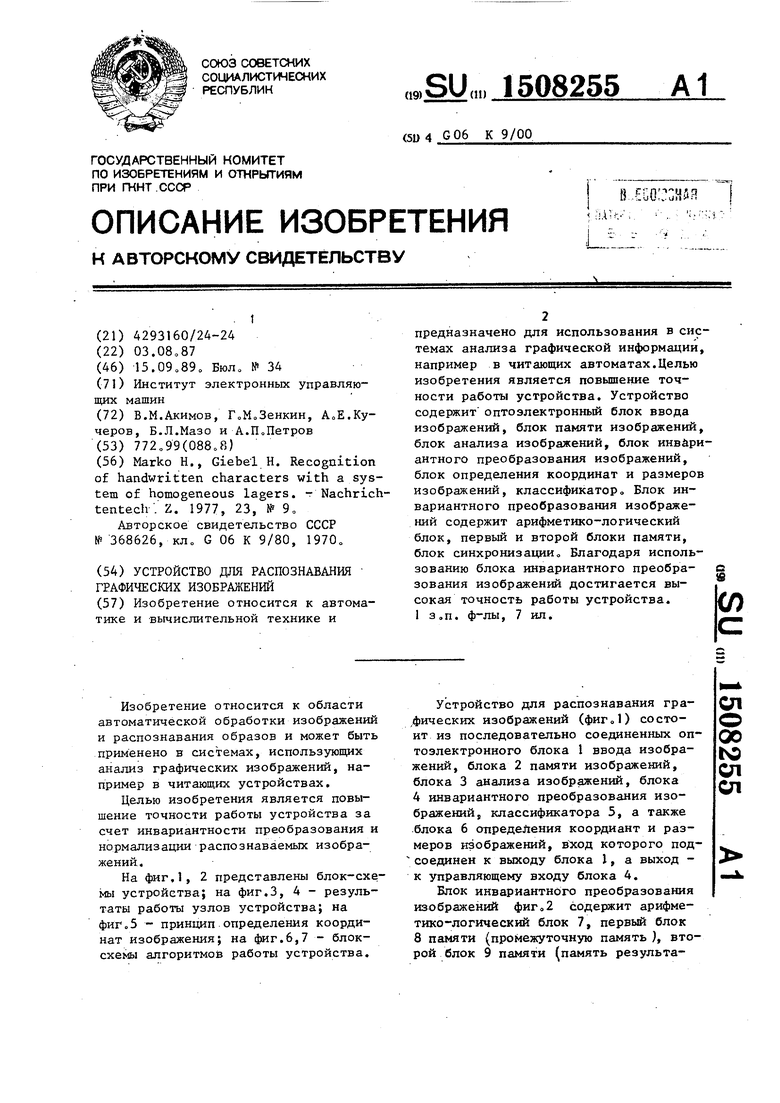
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ИНВАРИАНТНОЙ ИДЕНТИФИКАЦИИ ОТПЕЧАТКОВ ПАЛЬЦЕВ ПО КЛЮЧЕВЫМ ТОЧКАМ | 2012 |
|
RU2486590C1 |
| УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ ИЗОБРАЖЕНИЙ ПО БАЗОВОМУ ИНТЕГРАЛЬНОМУ МЕТОДУ (БИМ) | 1996 |
|
RU2162247C2 |
| СПОСОБ ПОВЫШЕНИЯ РАДИОЛОКАЦИОННОГО РАЗРЕШЕНИЯ, СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И СПОСОБ ДИСТАНЦИОННОГО ВЫЯВЛЕНИЯ СИСТЕМОЙ МАЛОРАЗМЕРНЫХ ОБЪЕКТОВ | 2004 |
|
RU2265866C1 |
| УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ ИЗОБРАЖЕНИЯ ОБЪЕКТА | 1992 |
|
RU2054196C1 |
| УСТРОЙСТВО ПОИСКА ДУБЛИКАТОВ ИЗОБРАЖЕНИЙ | 2013 |
|
RU2538319C1 |
| Устройство для отображения графической информации на экране цветного телевизионного индикатора | 1990 |
|
SU1836719A3 |
| СПОСОБ ИДЕНТИФИКАЦИИ ПРОТЯЖЕННЫХ ОБЪЕКТОВ ЗЕМНОЙ ПОВЕРХНОСТИ | 2015 |
|
RU2640331C2 |
| Устройство для распознавания изображений | 1988 |
|
SU1522254A1 |
| РАСПОЗНАЮЩЕЕ УСТРОЙСТВО | 2004 |
|
RU2266565C1 |
| Устройство для определения рассогласования в телевизионной следящей системе | 1983 |
|
SU1104692A1 |


Изобретение относится к автоматике и вычислительной технике и предназначено для использования в системах анализа графической информации, например в читающих автоматах. Целью изобретения является повышение точности работы устройства. Устройство содержит оптоэлектронный блок ввода изображений, блок памяти изображений, блок анализа изображений, блок инвариантного преобразования изображений, блок определения координат и размеров изображений, классификатор. Блок инвариантного преобразования изображений содержит арифметико-логический блок, первый и второй блоки памяти, блок синхронизации. Благодаря использованию блока инвариантного преобразования изображений достигается высокая точность работы устройства. 1 з.п. ф-лы, 7 ил.
последовательность бинарных сигналов„гл па в память,, а на выходе параллельБлок 1 выполнен на основе твердотельных или вакуумных фотопреобразователей изображения и пороговых устройств. Его выходная информация подается на вход блока 2 памяти изображений и сг блока 6 определения координат и размеров изображений.Блок 2 памяти изображений -регистрового тица,и с его выхода . информация поступает на блок 3 аналиньш порт Таким образом, по адресам расположения изображений в ОЗУ микропроцессора известны его координаты X и Y для вычисления управляющих па раметров, которые; передаются затем в блок 4. Блок-схема алгоритма рабо этого блока представлена на фиг,6.
Предполагается, что строка документа уже вбщелена,, Тогда, X указыньш порт Таким образом, по адресам расположения изображений в ОЗУ микропроцессора известны его координаты X и Y для вычисления управляющих параметров, которые; передаются затем в блок 4. Блок-схема алгоритма работы этого блока представлена на фиг,6.
Предполагается, что строка документа уже вбщелена,, Тогда, X указы. 51
ваег положение вдоль строки, а Y - цоперек. Постоянная координата X соответствует одному столбцу развертки В соответствии с алгоритмом сначала проверяется, есть ли в столбце единичные точки, Тсе имеется начальный столбец изображения - 15„ Если нет, то проверка повторяется для следующего столбца. Если есть, то содержимое всего столбца заносится в отдельный рагистр и происходит присва
ивание Х оч Х-16„
Проверяются, если ли в следующем столбце единичные точки -17 Если ест.ь, то содержимое этого столбца ло- тически складывается поразрядно с содержимым регистра 18 и результат записывается в регистр - 17. Если нет единичньк точек, то изображение полностью просканированоо Происходит присваивание X д„ Х-1-19„
В регистре оказывается все изображение, сжатое по горизонтали по схеме ИЛИо В регистре определяются первая единичная точка и происходит присваивание 20 и последняя единичная точка, происходит присваивание
у.й 21
Вычисляется горизонтальный и вертикальный размеры изображения Н
X пин Х
+1 и
-Y
нам
+1 -22,
Координаты и размеры знака передаются На управляющий вход блока 4 Блок-схема алгоритма работы блока 4 инвариайтного преобразования полей анализа представлена на . Используются следующие обозначения: P(X,Y) - бинарная функция на заданном
поле анализа;
„014 - Y цач относительные координаты; п - номер ОЛО;
;(ДХ, AY) - функция, задающая разбиение поля анализа на ОЛО (функция параметризована по Н и V) ;
g
функция двух переменных, реализуемая АЛУ;
i - номер обра.батываемой точки в 50 заданной ОЛО;
О, если точка не последняя в заданной ОЛО:
45 в наличии в устройстве механизма инвариантности к подобным преобразованиям изображения, к его локальным изменениям,и в увеличении надежности распознавания, а следовательно, повышении точности устройства
Формула изобретения
ni 1 1, в противном случае К Устройство для распознавания функция параметризова- 55 графических изображений, содержащее t,Ha по Н и V,оптоэлектронный блок ввода изображеС (п) - результат обработки задан- кий, выход которого подключен к вхо- ной ОЛО (записывается в ДУ блока памяти изображений, блок память результатов)о анализа изображений, вход которого
Входные параметры для работы блока; , Н, V, Последовательность.
у Y K«i(, ,
0
5
5
работы следующая, Блок получает управляющие параметры X„„,,, Y , Н 5 и V от блока 6о Происходит очистка промежуточной памяти - 23.
Проверяется, принадлежит ли точка с текущими координатами X, Y области изображения, т.е, выполняются ли условия X ц, X i -24, Если нет, то проверка повторяется для следующей точки, если да, то переход к очередному этапу
Определяется номер ОЛО (J X, dY)-25.
Функция f параметризована по Н и V и она может либо вычисляться в процессе работы, либо задаваться набо- 0 ром таблиц, выбираемых по Н и V.
Вычисляется арифметико-логическая функция АЛУ для i - точки и - ОЛО g, gLP(X,y)g..,3-26. Здесь P(X,Y) - значениепеременной на выходе блока; 8;-Г значение выхода АЛУ, записанного в промежуточную память для , i - 1 точки п -ОЛОо
С помощью функции E(jjX,/ у) определяется, является ли текущая точ- 0 ка последней в п - ОЛО - 27. Если нет, то в память результатов- С(п) g(n) -28 и проверяется, является ли точка последней, т.е. выполняется ли
условие X Х он; Y Y -29. Если
нет, то возврат в 24, - то окончание обработки - 30. Полученньй код передается в классификатор 5 о
Если АЛУ - многоразрядное, то обрабатываются все поля анализа сразу,
если одноразрядное, то обработка полей ведется поочередно, но по одному и тому же алгоритму.
Основной эффект применения данного технического решения заключается
в наличии в устройстве механизма инвариантности к подобным преобразованиям изображения, к его локальным изменениям,и в увеличении надежности распознавания, а следовательно, повышении точности устройства
Формула изобретения
.соединен с выходом блока памяти изображений, и классификатор, о т л и - чающееся тем, что, с целью повышения точности, в устройство вве- дены блок инвариантного преобразования изображений, информационный вход которого подключен к выходу блока анализа изображений, а выход соединен с входом классификатора, блок оп- ределения координат и размеров изображений, вход которого соединен с выходом оптоэлектронного блока ввода изображений, а выход подключен к управляющему входу блока инвариантного преобразования изображений,
синхронизации, причем инфо мационньй. вход и выход первого блока памяти соединены соответственно с выходом и первым информационным входом арифметико-логического блока, второй информационный вход KOTQporo является информационным входом блока инвариантного преобразования изображений, информационный вход второго блока памяти соединен с выходом первого блока памяти, а его выход является выходом блока инвариантного преобразования изображений, управляющие.входы арифметико-логического блока, первого и второго блоков памяти соединены с первым, вторым и третьим выходами блока синхронизации соответственно,вход запуска которого является управляющим входом блока инвариантного преобразования изображений
13
Уяоу
у
п
Фие.З
ж.
VL
ФиеМ
fc:
HQ4 КОН
Фи9.5
Фиг. 6
Редактор О«Спесивых
Фиг. 7
Составитель А.Краснов
Техред М.Моргентал Корректор Т„Палий
ZJ
л
2«
25
/
26
/
27
f
28
.
f
23
30
| Marko Н,, Giebel Н | |||
| Recognition of handwritten characters with a system of homogeneous lagers | |||
| - Nachrich- tentech | |||
| Z | |||
| Шеститрубный элемент пароперегревателя в жаровых трубках | 1918 |
|
SU1977A1 |
