Изобретение относится к автоматике и.вычислительной технике и может быть использовано при построенци систем распознавания и идентификации простых образов, изображений, пространственных сигналов.
Цель изобретения - повышение быстродействия устройства за счет аппаратурной реализации операций предварительной обработки изображения.
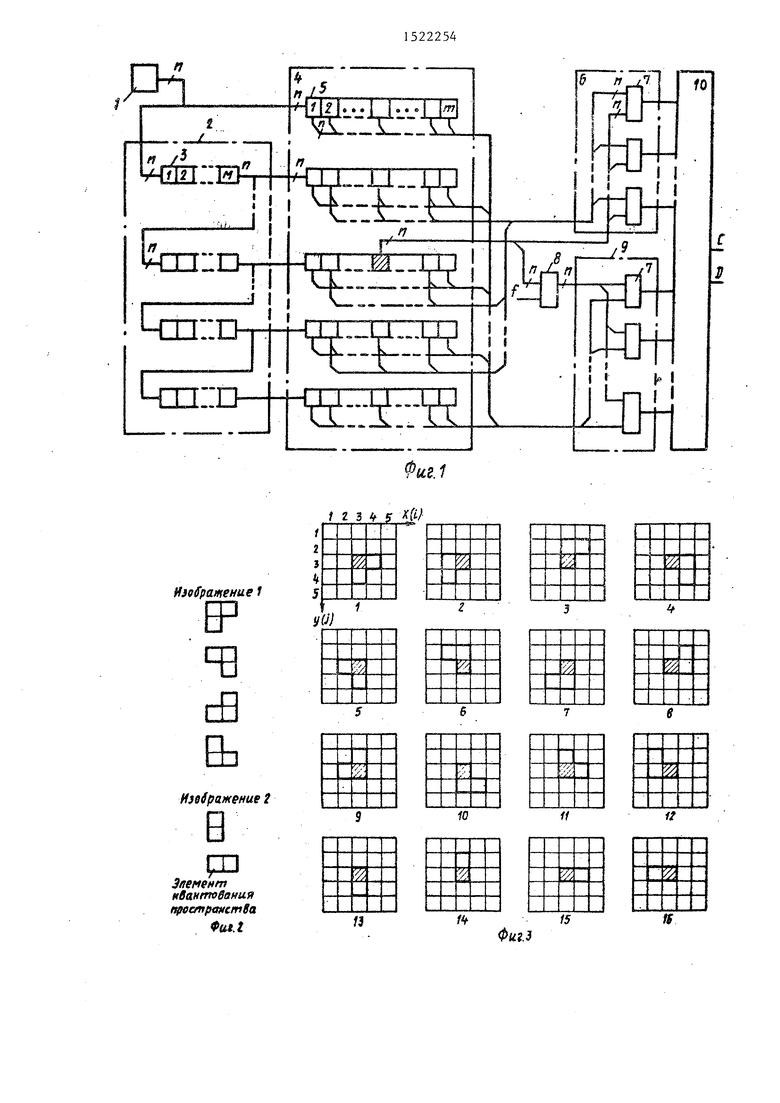
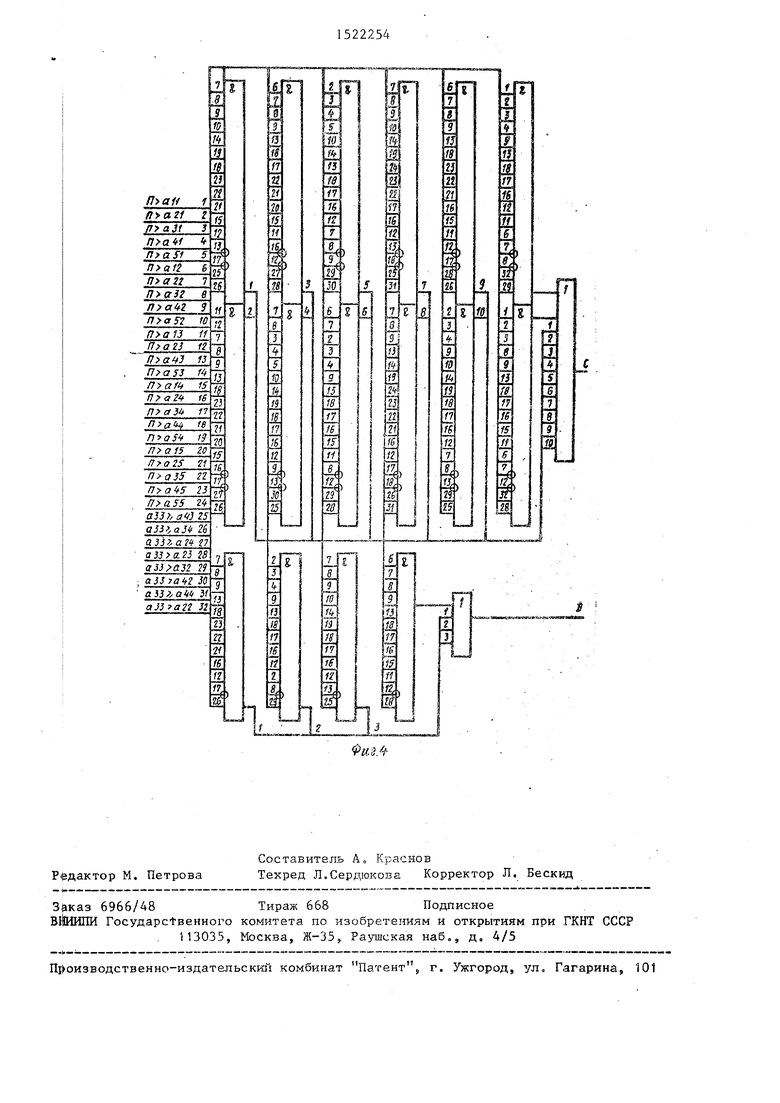
На фиг. 1 изображена структурная схема предлагаемого устройства; на фиг. 2 - конкретные примеры двух распознаваемых изображений при разной ориентации; на фиг. 3 - положения этих изображений в матрице окна, при которых обеспечивается их распознавание; на фиг. 4 - функциональная схема блока распознавания, построенного применительно к данным изображениям.
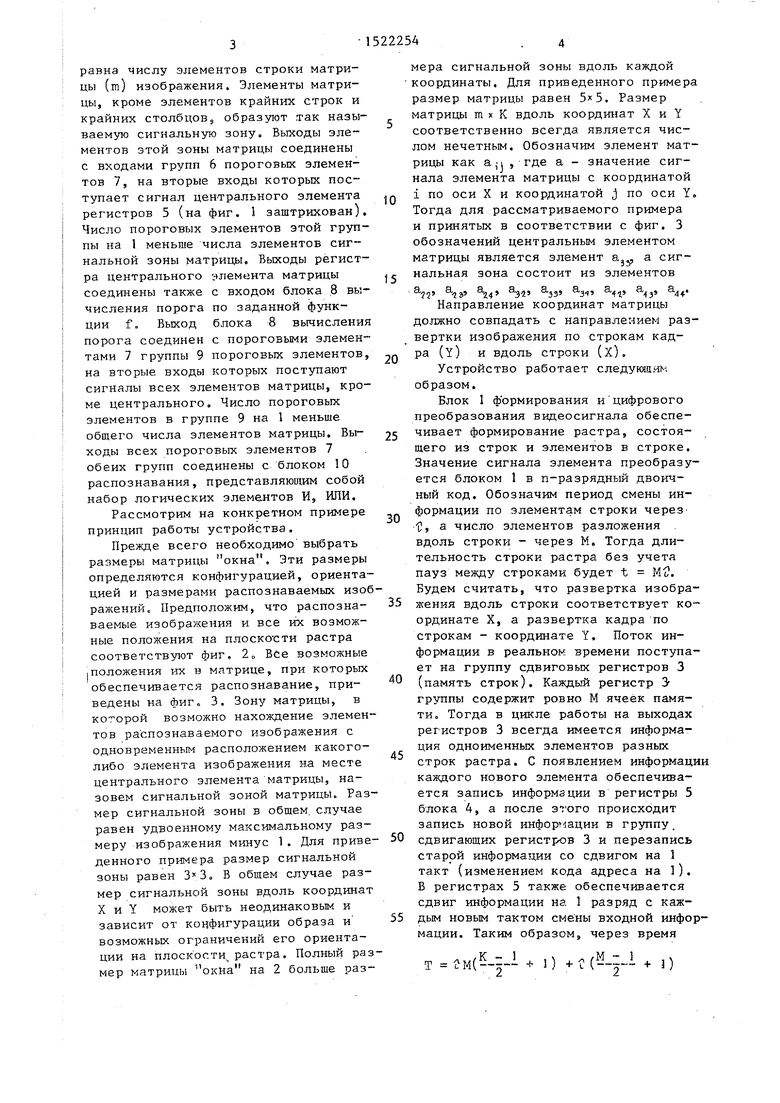
Устройство содержит (фиг. 1) блок 1 формирования и цифрового преобразования видеосигнала; блок 2 памяти, состоящий из последовательно соединенных сдвигающих регистров 3, которые являются элементами памяти одной строки. Элементы 3 памяти строки соединены между собой последовательно и работают по принципу сдви- .гающих регистров л-разрядных слов. Выходы блока 1 формирования и цифрового преобразования видеосигнала и элементов 3 памяти строки, т.е. сдвигающих регистров, соединены с входами, блока 4 формирования электронного окна, который состоит из сдвигающих регистров 5, обеспечивающих сдвиг п-разрядного слова за один такт. Число регистров равно числу элементов столбца матрицы (К) изображения, а разрядность сдвига
ел
1ч5 ГчЭ ЬО
S
равна числу элементов строки матрицы (т) изображения. Элементы матрицы, кроме элементов крайних строк и крайних столбцов, образуют так называемую сигнальную зону. Выходы элементов этой зоны матрицы соединены с входами групп 6 пороговых элементов 7, на вторые входы которых поступает сигнал цеН Трального элемента регистров 5 (на фиг. 1 заштрихован). Число пороговых элементов этой группы на 1 меньше числа элементов сигнальной зоны матрицы. Выходы регистра центрального элемента матрицы соединены также с входом блока 8 вычисления порога по заданной функции f. Выход блока 8 вычисления порога соединен с пороговыми элементами 7 группы 9 пороговых элементов, на вторые входы которых поступают сигналы всех элементов матрицы, кроме центрального. Число пороговых элементов в группе 9 на 1 меньше общего числа элементов матрицы. Выходы всех пороговых элементов 7 обеих групп соединены с блоком 10 распознавания, представляющим собой набор логических элементов И, ИЛИ.
Рассмотрим на конкретном примере принцип работы устройства.
Прежде всего необходимо выбрать размеры матрицы окна. Эти размеры определяются конфигурацией, ориентацией и размерами распознаваемых изображений Предположим, что распознаваемые изображения и все их возможные положения на плоско сти растра соответствуют фиг. 2о Все возможные
Iположения их в матрице, при которых обеспечивается распознавание, приведены на фиг о 3, Зону матрицы, в которой возможно нахождение элементов распознаваемого изображения с одновременным расположением какого- либо элемента изображения на месте центрального элемента матрицы, назовем сигнальной зоной матрицы. Размер сигнальной зоны в общем, случае равен удвоенному максимальному размеру изображения минус 1, Для приведенного примера размер сигнальной зоны равен В общем случае размер сигнальной зоны вдоль координат X и Y может быть неодинаковым и зависит от конфигурации образа и возможных ограничений его ориентации на плоск ости растра. Полный размер матрицы окна на 2 больше раз
мера сигнальной зоны вдоль каждой координаты. Для приведенного примера размер матрицы равен 55, Размер матрицы m X К вдоль координат X и Y соответственно всегда является числом нечетным. Обозначим элемент матрицы как а- , где а - значение сигнала элемента матрицы с координатой i по оси X и координатой j по оси Y, Тогда для рассматриваемого примера и принятых в соответствии с фиг, 3 обозначений центральным элементом матрицы является элемент а. а сигнальная зона состоит из элементов
0
5
0
5
0
5
0
5
а
чэ
а
гэ 24 S J 3 34 41
Направление координат матрицы ДО.ЛЖНО совпадать с направлением развертки изображения по строкам кадра (Y) и вдоль строки (х).
Устройство работает следуилцда-; образом.
Блок I формирования и цифрового преобразования видеосигнала обеспечивает формирование растра, состоящего из строк и элементов в строке. Значение сигнала элемента преобразуется блоком 1 в п-разрядный дворгч- ный код. Обозначим период смены информации по элементам строки через С, а число элементов разложения вдоль строки - через М, Тогда длительность строки растра без учета пауз между строками будет t Mt, Будем считать, что развертка изображения вдоль строки соответствует координате X, а развертка кадра по строкам - координате Y. Поток информации в реальном времени поступает на группу сдвиговых регистров 3 (память строк). Каждый регистр 3 группы содержит ровно М ячеек памяти. Тогда в цикле работы на выходах регистров 3 всегда имеется информация одноименных элементов разных строк растра, С появлением информации каждого нового элемента обеспечивается запись информации в регистры 5 блока 4, а после Э7 ого происходит запись новой инфор(ации в группу, сдвигающих регистров 3 и перезапись старой информации со сдвигом на 1 такт (изменением кода адреса на 1), В регистрах 5 также обеспечивается сдвиг информации на 1 разряд с каждым новым тактом смены входной информации. Таким образом, через время
.К - 1
,М - I
т M(-|-i - о )
5
от начала развертки изображения (бе учета пауз между .строками) первый элемент разложения растра оказьгоа- ется на месте центрального элемента матрицы. Это соответствует началу анализа, который длится в течение всего кадра развертки изображения и закончится с задержкой относительно конца кадра на указанное выше время Т (вопрос о краевом эффекте рассмотрен ниже). Информация в виде п-разрядных слов со всех ячеек памяти (регистров) одно1Временно поступает на элементы 7 сравнения, а. информация центрального элемента матрицы, кроме того, поступает на блок 8 вьгаисления порога, который осуществляет вычисление порога по заданной функции:
П f(a ).
Функция вычисления порога может быть постоянной или выбираться в процессе работы.
Например, П а - р, где р - какое-либо целое положительное число, или П азз(1 -Ч.) где коэффициент q I. Вычисление порога дол-, жно обеспечиваться за время, меньшее t. На выходах пороговых схем группы 6 появляются сигналы вндэ
а ээ
а ij и вида а 33 п а на
выходах пороговых схем группы 9 - сигналы вида П Обозначим множество элементов, окружающих распознаваемый образ, для случая, приведенного на фиг. 3,1 через 
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ ИЗОБРАЖЕНИЙ ПО БАЗОВОМУ ИНТЕГРАЛЬНОМУ МЕТОДУ (БИМ) | 1996 |
|
RU2162247C2 |
| УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ ИЗОБРАЖЕНИЙ ПО БАЗОВОМУ ИНТЕГРАЛЬНОМУ МЕТОДУ (БИМ) | 1996 |
|
RU2162248C2 |
| УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ ИЗОБРАЖЕНИЯ ОБЪЕКТА | 1992 |
|
RU2054196C1 |
| УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ И ОПОЗНАВАНИЯ ИЗОБРАЖЕНИЙ | 1973 |
|
SU368626A1 |
| Устройство для распознавания контуров изображений | 1983 |
|
SU1156103A1 |
| Телевизионный координатор | 1983 |
|
SU1109956A1 |
| УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ ИЗОБРАЖЕНИЯ | 1992 |
|
RU2045781C1 |
| Устройство для управления адаптивным роботом | 1979 |
|
SU883867A2 |
| Способ измерения координат центра тяжести изображения и устройство для его осуществления | 1990 |
|
SU1806445A3 |
| Устройство формирования сигнала для коррекции искажений телевизионного изображения | 1985 |
|
SU1317687A2 |
Изобретение относится к автоматике и вычислительной технике и предназначено для систем распознавания и идентификации простых образцов, сигналов. Целью изобретения является повышение быстродействия устройства за счет аппаратурной реализации операций предварительной обработки изображения. Устройство содержит блок формирования и цифрового преобразования видеосигнала, блок формирования электронного окна, блок вычисления порога, блок памяти, две группы пороговых элементов и блок распознавания. За счет одновременного отделения элементов изображения от элементов фона быстродействие увеличивается более, чем в 10 раз. 4 ил.
А,
31 42 5Z 5J 54
Алгоритм распознавания для данного случая можно представить, в виде выражения:
С, (П7 А,)Л(П а4э)Л(П аз4)( . (О
Здесь выражения, заключенные в кого нуля - при невыполнении задан- круглые скобки, принимают значение ных условий. Для случая расположения распознаваемого образа, как на
фиг. 3.2, имеем:
логической единицы при вьшолнении заданных условий и значения логичесС, (П 7 Aj)A(n i aj)A(n в.}(a , (а. гз 2)
где А г f la г 2 а э-42 44
Для случая на фиг. 3.3:
С (П АЗ)А(П аз,)А(П 4 а4)А(аз5 аз,)А(а .j, а,), (З) где АЗ ., si 8-51 я 8.53 8,3 8.44. ii
В формулах 1-3 вариации выражений в четвертых и пятых скобках ( или ) обеспечивают однократную вьщачу сигнала распознавания при равенстве сигналов элементов
распознаваемого изображения. Аналр- I
гично составляют алгоритм распознавания для других ориентации изоб 44 8-45 3F в-25 24 гэ}
3 35
is if «чч .1з}
ражения 1 (фиг. 3.4,...,3.12) и для изображения 2 (фиг. 3.13,... 3.16).
Суммарные логические функции распознавания изображений 1 и 2 реализуются блоком 10 распознавания.
Функциональная схема блока 10 для рассматриваемых примеров приведена
на фиг. 4. Для лучшего понимания принципа построения схема дана,без минимизации. На схеме реализация функций вида (П а ;:) осуществлена в эквивалентной форме (П а -),
Для устранения неопределенности, связанной с краевым эффектом, которая может привести к пропуску объекта, регистры 3 содержат , т-1ч
(М +-5 )
ячеек памяти. По окончании строки сканирования вписывается нулевая
тактах. По оконинформация в
/т-К 2
чании каждого кадра вписывается ну,К-К левая информация в v-r-) строках,
1
каясдая из которых имеет (М + )
тактов. Такой режим работы устройства соответствует обрамлению реального растра полем с нулевой информацией, в результате чего обеспечивается идентификация объекта, примыканлцего вплотную к любому краю растра.
Для обеспечения быстрого вычисления порога и миниатюризации устройства целесообразно использовать в качестве блока 8 вычисления порога заранее запрограммированное ПЗУ, При этом по п адресным разрядам ПЗУ вводится текущая информация о значении сигнала центрального элемента матрицы, а остальные адресные разря ды можно использовать для выбора различных заранее запрограммированных функций вычисления порога, например вариации различных значений р или q.
В предлагаемом устройстве обеспечивается уп рошение алгоритма вычисления порога. За счет параллельного решения задачи отделения элементов изображения от элементов фона быстродействие уй еличивается более чем в десять раз„ В предлагаемом устрой
стве обеспечивается уменьщение вероятности пропуска объекта из-за краевого эффекта.
(Формула изобретения
Устройство для распознавания изображений, содержащее блок формирования и цифрового преобразования видеосигнала, выход которого соединен с входом блока памяти и входом первого сдвигающего регистра блока формирования электронного окна, входы остальных сдвигающих регистров которого соединены с выходами блока памяти, и блок распознавания, отличающееся тем, что, с целью повышения быстродействия, в него введены блок вычисления порога и две группы пороговых элементов, причем выход центральной ячейки центрального сдвигающего регистра блока формирования электронного окна соединен с входом блока вычисления порога,, выход кото- . рого соединен с первыми входами всех пороговых элементов одной из групп пороговых элементов, вторые входы которых соединены с выходами всех ячеек сдвигающих регистров блока формирования электронного окна за исключением центральной ячейки центрального сдвигающего регистра, первые входы пороговых элементов другой группы пороговых элементов соединены с входом блока вычисления порога, а вторые входы пороговых элементов этой группы соединены с выходами всех ячеек сдвигающих, регистров блока формиро йания электронного окна за исключением центральной ячейки центрального сдвигающего регистра и крайних ячеек всех сдвигающих регистров блока формирования электронного окна, все выходы пороговых элементов двух групп пороговых элементов соединены с входом блока распознавания.
| Патент США № 4369430, кл | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Гребенчатая передача | 1916 |
|
SU1983A1 |
| Устройство для селекции дефектов изображений объектов | 1984 |
|
SU1196917A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
