3150
Изобретение относится к измерению расхода жидкостей электромагнитным методом,
Цель изобретения - повышение точ- ности измерения,
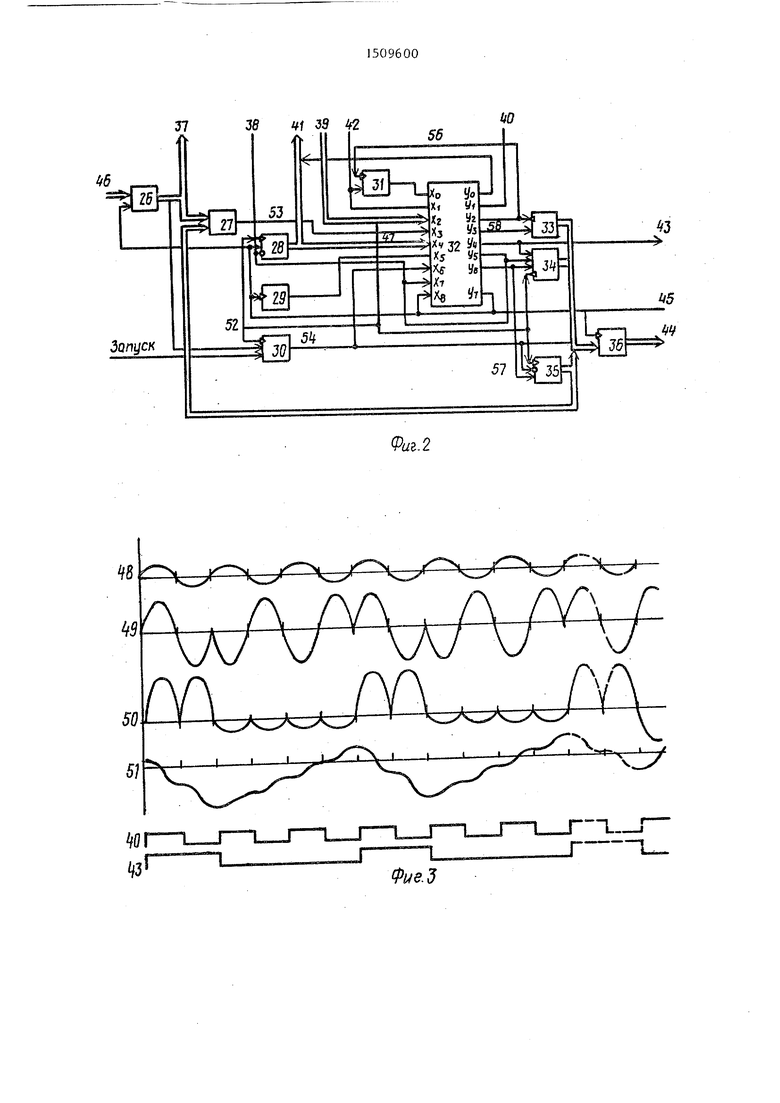
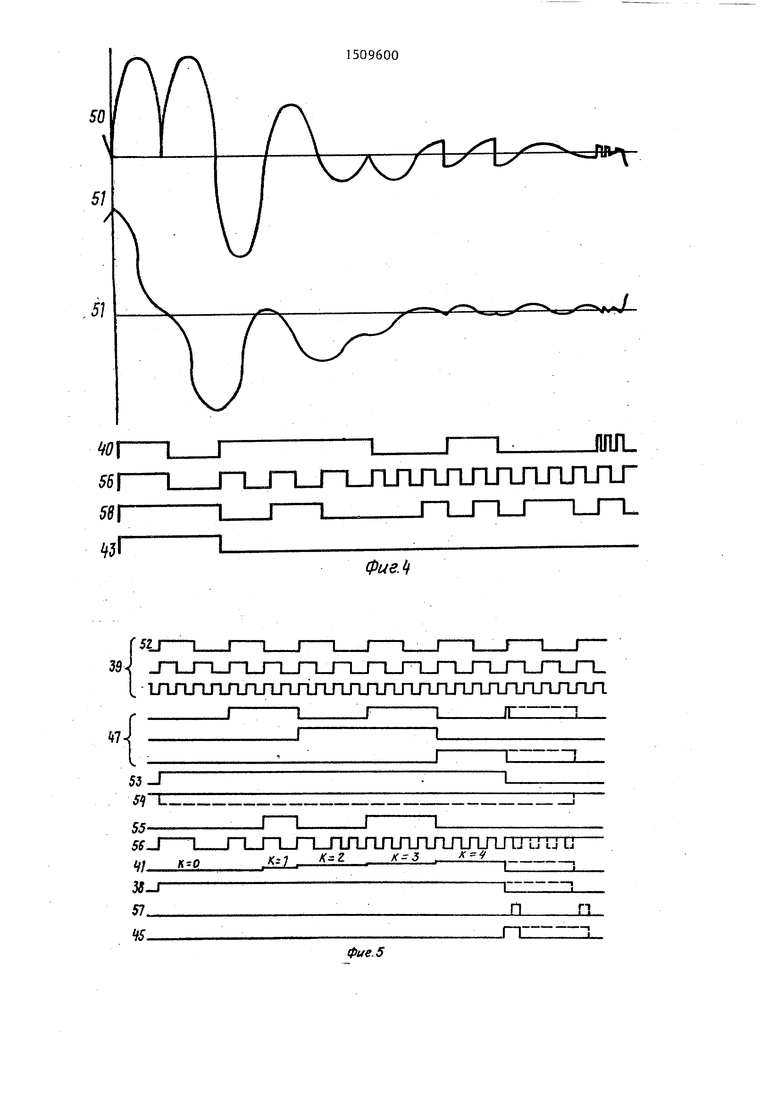
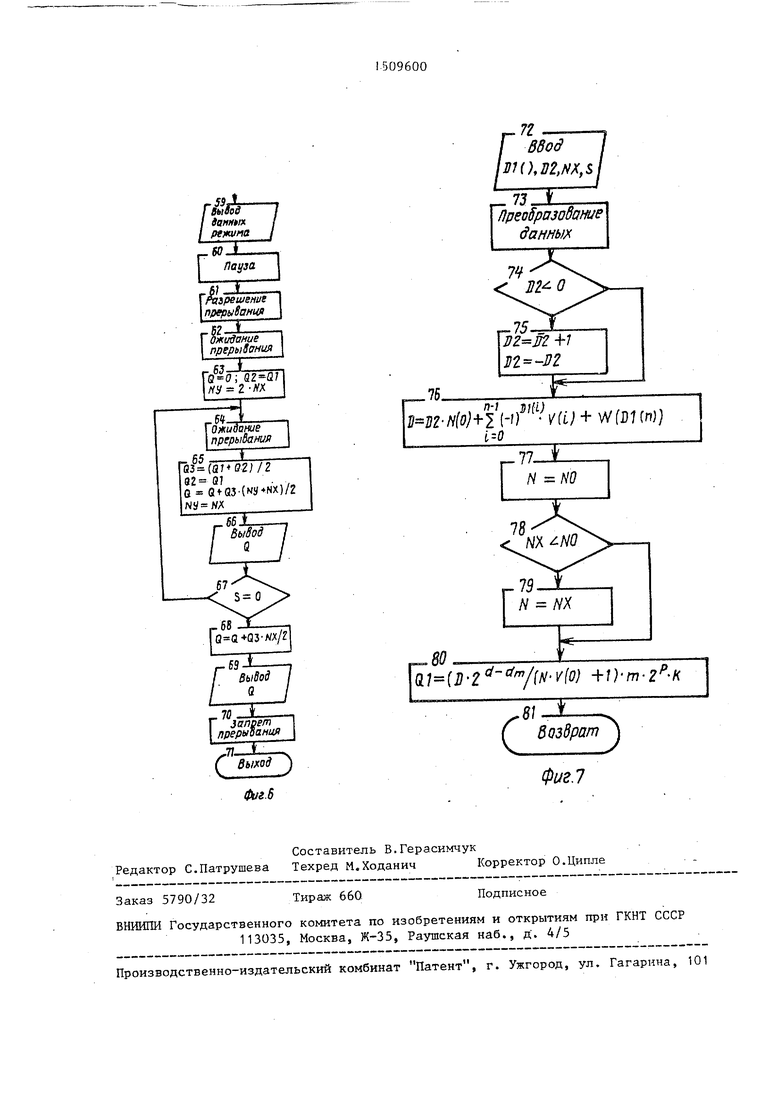
На фиг. 1 приведена структурная схема электромагнитного расх.одомера; на фиг. 2 - структурная схема устройства управления; на фиг, 3 - времен- ныв диаграммы основного цикла измерения; на фиг. 4 - временные диаграммы процесса интегрирования вспомогательного цикла; на фиг. 5 - временные диаграммы управляющих сигналов вспо- могательного цикла;.на фиг. 6 - структурная схема ведущей программы вычислительного устройства; на фиг. 7 - структурная схема прерывающей программы вычислительного устрой- ства.
Расходомер содержит источник 1 питания, электромагнитный преобразователь 2 расхода, усилитель 3 основного сигнала, усилитель 4 опорного сигнала, цифроаналоговый преобразователь мантиссы 5, фазовращатель 6, интегратор 7 опорного сигнала, цифро- аналоговый преобразователь 8 порядка ключ 9 измерения нуля, суммирующий усилитель 10 отклонения, ключ 11 режима, цифроаналоговый преобразователь 12 допустимого отклонения, инвертор 13, ключ 14 основного сигнала, ключ 15 опорного сигнала, суммирующий уси- литель 16, синхронный детектор 17, цифроаналоговый преобразователь 18 веса, интегратор 19, компаратор 20, формирователь 21 тактовых импульсов, устройство 22 управления, регистр 23 ввода, устройство 24 обмена, вычислительное, устройство 25.
Устройство 22 управления содержит регистр 26 режима, схему 27 сравнения, счетчик 28 вспомогательного дик- ла, триггер 29 четности, триггер 30 запуска, D-триггер 31, программируемую логическую матрицу 32, регистр 33 сдвига, реверсивньй счетчик 34, счетчик 35 основного цикла, регистр 36 вывода.
На фиг. 2-5 приведены сигналы 37- 58.
Устройство работает следующим образом. .
При помощи источника 1 питания, соединенного с обмоткой возбуждения преобразователя 2 расхода, в активной зоне преобразователя возбуждается синусоидальное магнитное поле. Под действием этого поля на электродах преобразователя 2 расхода генерируется основной сигнал, а во встроенном в активную зону преобразователе индукции магнитного поля генерируется опорный сигнал. Основной сигнал поступает на вход усилителя основного сигнала 3 и затем на вход цифроанало- гового преобразователя 8 порядка. Опорный сигнал поступает на вход усилителя 4 опорного сигнала и затем на вход цифроаналогового преобразователя 5 . С выхода этого преобразователя сигнал поступает на входы фазовращателя 6 и интегратора 7 опорного сигнала, к выходам которых подключен ключ 11 режима. С выхода этого ключа сигнал поступает па один из входов ключа 15 опорного сигнала непосредственно, а на другор; вход поступает через инвертор 13. Выход интегратора 7 соединен с одним из входов ключа 9 измерения нуля, второй вход которого соединен с нулево шиной. Сигналы с выходов цпфроаналогового преобразователя 8 порядка и ключа 9- измерения нуля поступают на входы суммирующего усилителя 10 отклонения. Выход этого усилителя соединен с входом цифро- аналогового преобразователя 12 допустимого отклонения, к выходу которого подключен один из входов ключа 14 основного сигнала, второй вход которого соединен с нулевой шиной, а выход соединен с одним из входов суммирующего усилителя 16, на второй вход которого .поступает сигнал с выхода ключа 5 опорного сигнала. С выхода суммирующего усилителя 16 сигнал через синхронный детектор 17, цифроана- логовьш преобразователь 18 веса и интегратор, 19 поступает на вход компаратора 20, где преобразуется в цифровую форму. С выхода компаратора 20 сигнал поступает на вход D-триггера 31 и второй вход программируемой логической матрицы 32, первый вход которой соединен с выходом D-триггера 31. (Нумерация входов и выходов логической матрицы на фиг. 2 начинается с нуля). Выход интегратора 7 опорного сигнала соединяется с входом формирователя 21 тактовых импульсов, который вырабатывает на выходе три цифровых меандровых сигнала, первый из них имеет период, равный периоду входного сигнала, второй - половине
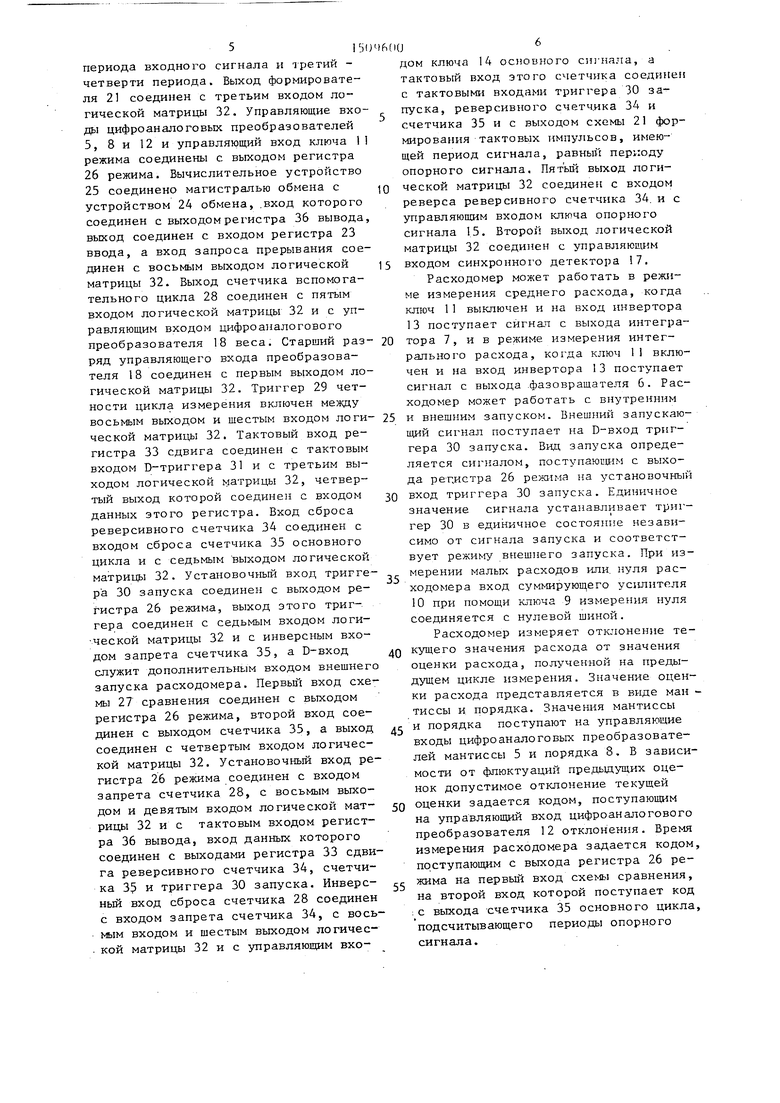
периода входного сигнала и аретий - четверти периода. Выход формирователя 21 соединен с третьим входом логической матрицы 32. Управляющие входы цифроаналоговых преобразователей 5, 8 и 12 и управляющий вход ключа 1 режима соединены с выходом регистра 26 режима. Вычислительное устройство 25 соединено магистралью обмена с устройством 24 обмена, .вход которого соединен с выходом регистра 36 вывода выход соединен с входом регистра 23 ввода, а вход запроса прерывания соединен с восьмым выходом логической матрицы 32. Выход счетчика вспомогательного цикла 28 соединен с пятым входом логической матрицы 32 и с управляющим входом цифроаналогового преобразователя 18 веса. Старший разряд управляющего входа преобразователя 18 соединен с первым выходом логической матрицы 32. Триггер 29 четности цикла измерения включен между восьмым выходом и щестым входом логической матрицы 32. Тактовый вход регистра 33 сдвига соединен с тактовым входом D-триггера 31 и с третьим выходом логической матрицы 32, четвертый выход которой соединен с входом данных этого регистра. Вход сброса реверсивного счетчика 34 соединен с входом сброса счетчика 35 основного цикла и с седьмым выходом логической матрицы 32. Установочный вход триггера 30 запуска соединен с выходом регистра 26 режима, выход этого триггера соединен с седьмым входом логи- ческой матрицы 32 и с инверсным входом запрета счетчика 35, а D-вход служит дополнительным входом внешнего запуска расходомера. Первьй вход схемы 27 сравнения соединен с выходом регистра 26 режима, второй вход соединен с выходом счетчика 35, а выход соединен с четвертым входом логической матрицы 32. Установочный вход регистра 26 режима соединен с входом запрета счетчика 28, с восьмым выходом и девятым входом логической матрицы 32 и с тактовым входом регистра 36 вывода, вход данных которого соединен с выходами регистра 33 сдвига реверсивного счетчика 34, счетчика 35 и триггера 30 запуска. Инверсный вход сброса счетчика 28 соединен с входом запрета счетчика 34, с восьмым входом и шестым выходом логичес- . кой матрицы 32 и с управляющим вхоo6
дом ключа 14 основного сш ка.па, а тактовый вход этого счетчика соедрше с тактовыми входами триггера 30 запуска, реверсив1сого счетчика 34 и счетчика 35 и с выходом схемы 21 формирования тактовых импульсов, имеющей период сигнала, равный перяоду опорного сигнала. Пят ый выход логической матрицы 32 соединен с входом реверса реверсивного счетчика 34. и с управляющим входом ключа опорного сигнала 15. Второй выход логической матрицы 32 соединен с управляющим
входом синхронного детектора 17.
Расходомер может работать в режиме измерения среднего расхода, когда ключ 11 выключен и на вход инвертора 13 поступает сйгнап с выхода интегратора 7, и в режиме измерения интегрального расхода, когда ключ 11 включен и на вход инвертора 13 поступает сигнал с выхода .фазовращателя 6. Расходомер может работать с внутренним
и внещним запуском. Внешний запускающий сигнал поступает на D-вход триггера 30 запуска. Вид запуска определяется сиг}1алом, поступающим с выхода регистра 26 режима на установочный
вход триггера 30 запуска. Единичное значение сигнала устанавливает триггер 30 в единичное состояние независимо от сигнала запуска и соответствует режиму внешнего запуска. При измерении малых расходов или. нуля расходомера вход суммирующ.его усилителя 10 при помощи ключа 9 измерения нуля соединяется с нулевой щиной.
Расходомер измеряет отклонение текущего значения расхода от значения оценки расхода, полученной на предыдущем цикле измерения. Значение оценки расхода представляется в виде ман - тиссы и порядка. Значения мантиссы
и порядка поступают на управляющие входы цифроаналоговых преобразователей мантиссы 5 и порядка 8. В зависимости от флюктуации предыдущих оценок допустимое отклонение текущей
оценки задается кодом, поступающим на управляющий вход цифроаналогового преобразователя 12 отклонения. Время измерения расходомера задается кодом, поступающим с выхода регистра 26 режима на первьй вход схемы сравнения, на второй вход которой поступает код ;с выхода счетчика 35 основного цикла, подсчитывающего периоды опорного сигиала.
Значение мантиссы, порядка, допус тимого отклонения, времени измерения режимы измерения среднего или интегрального расхода, вид запуска, режим измерения нуля задаются программно при помощи блока 25 и посредством устройства 24 обмена, соответствующие данные записываются в регистр 23 ввода.
Цикл измерения, состоящий из основного и вспомогательного циклов, начинается с того, что сигналом 45 данные из регистра 23 ввода записываются в регистр 26 режима. С выхода этого регистра данные поступают на управляющие входы цифроаналоговык преобразователей 5, 8, 12 и управляю- 1цие входы ключей 9, 11. Коэффициенты передачи цифроаналоговых преобразова- гелей 5, 8 и 12 -соответственно равны
к Г Ш, в
- 1 dtn-oL
к„ 2 ,
и,„ и, - U2.m.2
-.g - ,:м ivg , .v,.j
где га - мантисса оценки; р - порядок оценки; d - допустимое отклонение; dm - максимально допустимое отклонение ,
На выходе суммирующего усилителя 10 сигнал, пропорциональный отклоне- нию или разности текугдего значения расхода и оценки расхода предыдущего цикла измерения
р
Цифроаналоговым преобразователем
12 величина отклонения может усиливаться в заданное число раз.
Элементами 13-20 и 31 , 22 о.су- ществляется аналого-цифровое развер- тывающее преобразование oтнoDJeния переменных сигналов. Основной цикл этого процесса иллюстрируется временными диаграммами на фиг.З. Пусть текущий цикл измерения будет четным, что соответствует нулевому выходному сигналу триггера 29 четности. При положительном выходном напряжении 51 интегратора 19 на выходе компаратора 20 будет, единичное значение сигнала 42, что приводит к единичному значению сигнала 43 на управляющем входе ключа 15 опорного сигнала, при этом на вход суммирующего усилителя 16 поступает через ключ 15 опорный сигнал с входа инвертора 13 и на выходе суммирующего усилителя 16 возникает сумма опорного сигнала и сигнала отклонения (при выбранном в соответствии с
- o
5 0
5
0
5
0 j п
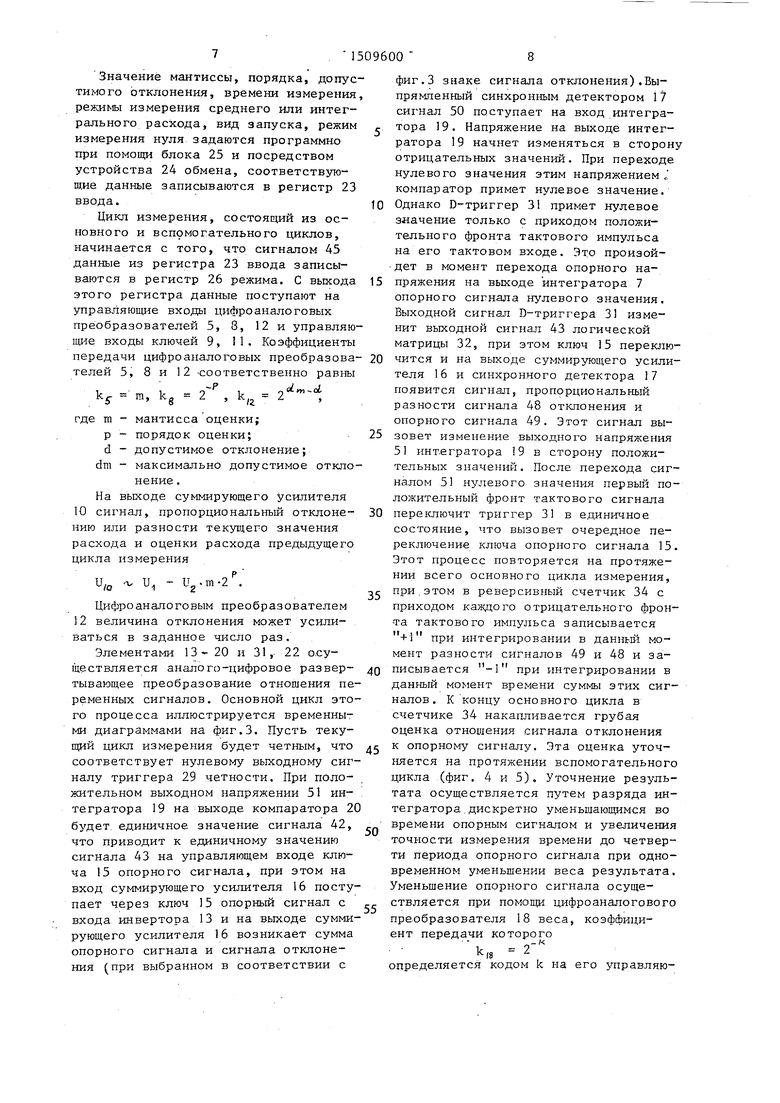
фиг.З знаке сигнала отклонения).Выпрямленный синхронным детектором 17 сигнал 50 поступает на вход интегратора 19. Напряжение на выходе интегратора 19 начнет изменяться в сторону отрицательных значений. При переходе нулевого значения этим напряжением L компаратор примет нулевое значение. Однако D-триггер 31 примет нулевое значение только с приходом положительного фронта тактового импульса на его тактовом входе. Это произой- - дет в момент перехода опорного напряжения на выходе интегратора 7 опорного сигнала нулевого значения. Выходной сигнал D-триггера 31 изменит выходной сигнал 43 логической матрицы 32, при этом ключ 15 переключится и на выходе суммирующего усилителя 16 и синхронного детектора 17 появится сигнал, пропорциональный разности сигнала 48 отклонения и опорного сигнала 49. Этот сигнал вызовет изменение выходного напряжения 51 интегратора 19 в сторону положительных значений. После перехода сигналом 51 нулевого значения первый положительный фронт тактового сигнала переключит триггер 31 в единичное состояние, что вызовет очередное переключение ключа опорного сигнала 15. Этот процесс повторяется на протяжении всего основного цикла измерения, при,этом в реверсивный счетчик 34 с приходом каждого отрицательного фронта тактового импульса записывается +1 при интегрировании в данньй момент разности сигналов 49 и 48 и записывается -1 при интегрировании в данный момент времени суммы этих сигналов. К концу основного цикла в счетчике 34 накапливается грубая оценка отнощения сигнала отклонения к опорному сигналу. Эта оценка уточняется на протяжении вспомогательного цикла (фиг. 4 и 5), Уточнение результата осуществляется путем разряда интегратора, дискретно уменьщающимся во времени опорным сигналом и увеличения точности измерения времени до четверти периода опорного сигнала при одновременном уменьшении веса результата. Уменьщение опорного сигнала осуществляется при помощи цифроаналогового преобразователя 18 веса, коэффициент передачи которого
,8 2- определяется кодом k на его зтправляютем входе. Изменение точности времени измерения осуществляется путем изменения нериода сигнала, постунаю-- щего на тактовый вход D-триггера 31 с третьего выхода логической матрицы
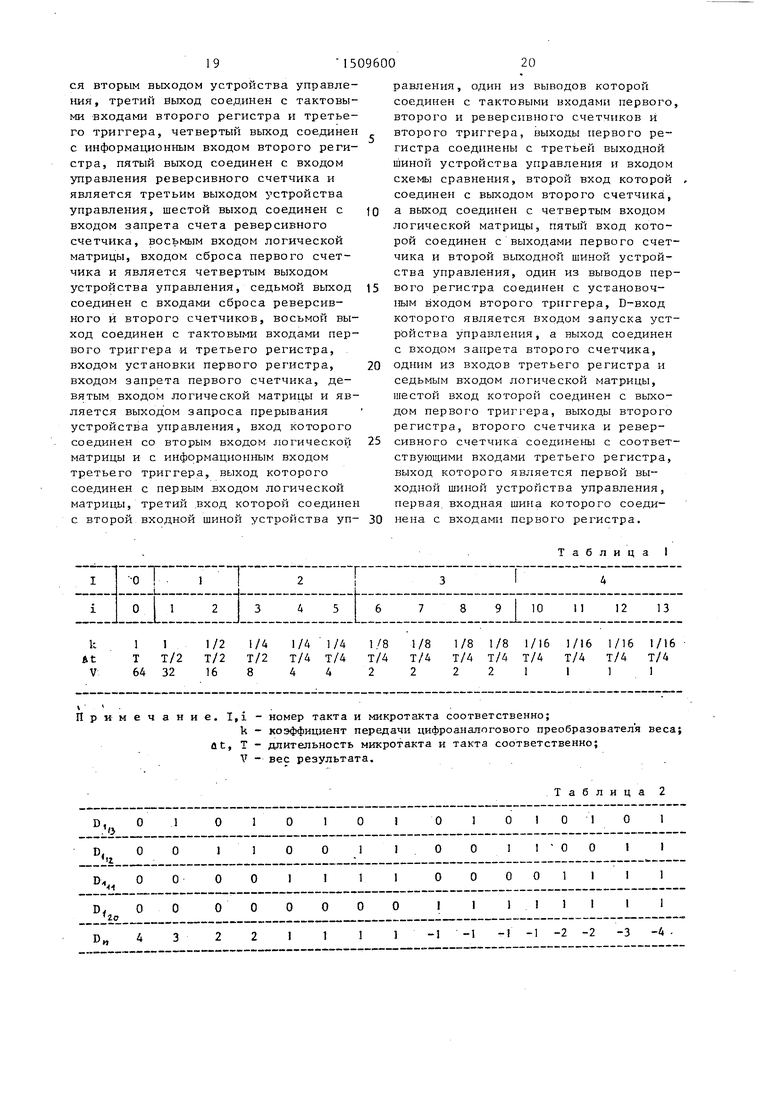
Алгоритм изменения коэффициента передачи, точности времени измерения и веса результата нриведен в табл.1.
Начиная с пятого микротакта, в табл. 1 содержатся микротакты с повторяющимся весом результата, что вносит некоторую избыточность, необходимую для сходимости процесса интегрирования вспомогательного цикла, т.е. для обеспечения возможности достижения выходным напряжением интегратора 19 нулевого уровня с учетом напряжения смещения нуля цифроаналоPe:iyj bTaT измерения oriioB ioi-o цикля онре.еляется гостояиисп. репер- сивного счетчика 34.
Вспомогательный цикл начинается,
когда код на выходе счетчика 35 основного цикла совпадает с; кодом, поступающим с выхода регистра 26 режима на нервый вход схемы сравнения
или в режиме внешнего запуска, когда сигнш7 зануска на выходе rpiirrepa 30 запуска нримет нулевое значение. Сигнал 38 шестого выхода логической матрицы либо выходным сигна-том схеьы 27
сравнения, mi6o выходным сигналом триггера запуска 30 переводигся в единичное состояние. При этом при по- мордн ключа 14 выключается снг иал 48 откло1 ения, ci-шмается установка НУЛЯ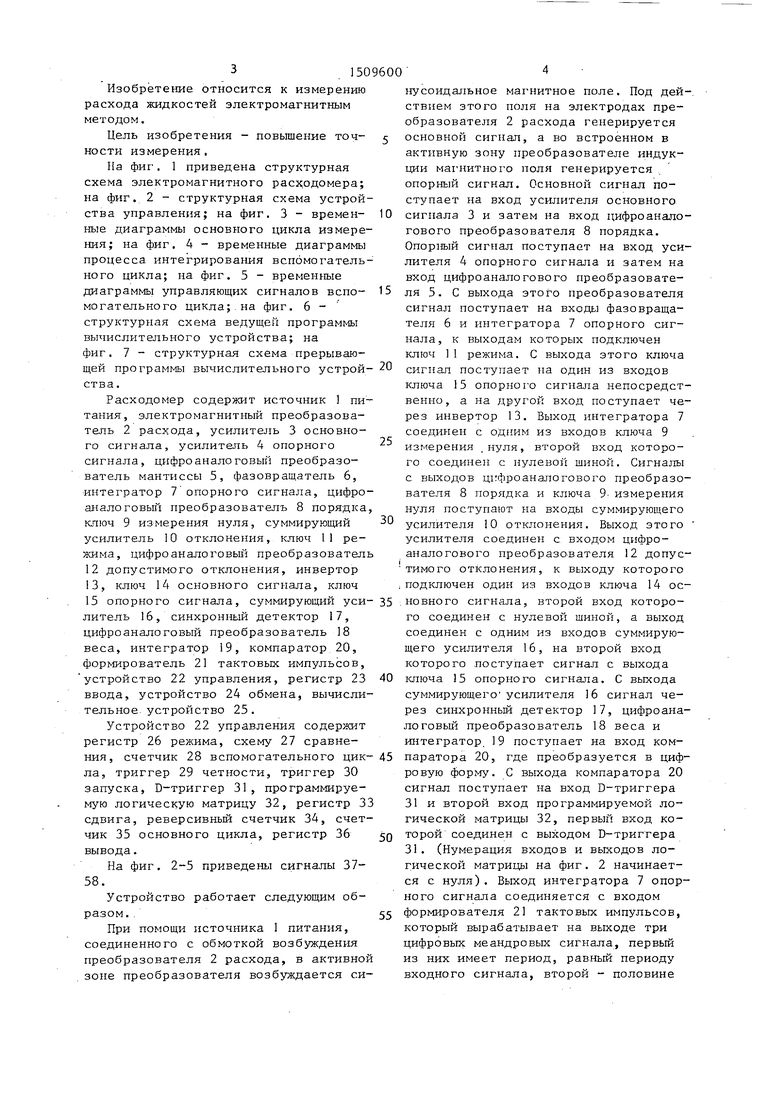

| название | год | авторы | номер документа |
|---|---|---|---|
| Электромагнитный расходомер | 1987 |
|
SU1578481A1 |
| Цифровое измерительное устройство расходомера | 1977 |
|
SU909573A2 |
| Цифровое измерительное устройство расходомера | 1974 |
|
SU690298A1 |
| Цифровое измерительное устройство расходомера | 1975 |
|
SU787898A2 |
| Амплитудно-фазовый анализатор гармоник периодических напряжений | 1985 |
|
SU1303950A2 |
| Измеритель параметров комплексных сопротивлений | 1989 |
|
SU1751690A1 |
| Устройство автоматической дискретной регулировки чувствительности радиоприемника | 1989 |
|
SU1748226A1 |
| УСТРОЙСТВО ПОИСКА И СОПРОВОЖДЕНИЯ СИГНАЛА СИНХРОНИЗАЦИИ В СПУТНИКОВЫХ СИСТЕМАХ СВЯЗИ ПО ПРИЕМУ | 1995 |
|
RU2093964C1 |
| АДАПТИВНЫЙ ЛАЗЕРНЫЙ ДОПЛЕРОВСКИЙ ЛОКАТОР | 1990 |
|
RU2012013C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ФЛУКТУИРУЮЩИХ ВИДЕОИМПУЛЬСОВ | 1990 |
|
RU2007854C1 |
Изобретение относится к измерению расхода жидкостей электромагнитным методом. Цель изобретения - повышение точности измерения. Электромагнитный расходомер содержит источник 1 питания, электромагнитный преобразователь 2 расхода, усилители 3 и 4, цифроаналоговые преобразователи 5, 8, 12, 18, ключи 9, 11, 14, 15, устройство управления 22. Кроме того, в состав расходомера входят фазовращатель 6, интеграторы 7 и 19, синхронный детектор 17, компаратор 20, формирователь тактовых импульсов 21. Устройство 22 управления содержит три регистра, два счетчика, три триггера, реверсивный счетчик, программируемую логическую матрицу. В расходомере осуществляется автоматическая коррекция аддитивной погрешности измерительной схемы, программная перестройка режима измерения. 7 ил.
30
гового преобразователя, 18, синхронно- 20 счетчика 28, запрещается работа ре- го детектора 17 и интегратора 19.
Последовательный код результата измерения вспомогательного цикла при помощи регистра 33 сдвига преобразуется в параллелышй код, который с учетом веса соответствующего разряда преобразуется блоком 25 по формуле
й й
V. + В„, .
где D, - результат измерения вспомогательного ци1спа; значение результата (О и.пи I) на 1-м микротакте; вес результата i-ro микротакта;
результат измерения последнего такта.
Результат измерения последнего такта определяется но табл. 2.
В табл. 2 в результат измерения последнего такта входит сумма результатов ,, начиная с десятого микротакта до микротакта, на котором произоишо первое изменение значения результата.
(-)
ёс
V; D. версивного счетчика 34. Счетчик вспомогательного цикла 28 под действием тактового импульса 52 начинает счн- тать такты вспомогательного цикла. 25 Результат записывается i регистр
сдвига 33 отрицательным фронтом тактового .:1ъса 56. На llepвo i такте вспомогательного никла запрещается изменение опорного сигнала нри номощи ключа 15 и разреиается изменение этого знака при помо1чи синхронного детектора 17 в занисимости от выходного сигнала D-триггера 31. Эта ситуация сохраняется до конца вспомогательного цикла. Происходит последовательное уменьшение уровня опорного сигнала и увеличение точности измерения времени с последовательной записью результатов в регистр 33 сдвига. На последнем 13-м микротакте D-триггер положительным фронтом нри- нимает состояние в соответствии с сигналом 42 и до конца- этого микротакта не меняется. Сигнал 40 управле35
40
Нулевому значение Df,,-/3 соответству- 45 синхронным детектором 17 приобет запись в D , а единичному - за-ретает возможность меняться не под
пись -1. Такой алгоритм обеспечива-действием выходного сигнала D-триггеет постоян 1ую длительность вспомога-ра 31, а под действием выходного сигтельного цикла, а в результат измерения входит только время до первого перехода выходным напряжением интегратора нулевого значения на последнем такте вспомогательного цикла. Результат измерения всего цикла измерения
+ 0„
V;
определяется по формуле
OnD D Vo + Zl (-)
i :Ci
где D - результат измерения основного цикла.
и
счетчика 28, запрещается работа ре-
версивного счетчика 34. Счетчик вспомогательного цикла 28 под действием тактового импульса 52 начинает счн- тать такты вспомогательного цикла. Результат записывается i регистр
сдвига 33 отрицательным фронтом тактового .:1ъса 56. На llepвo i такте вспомогательного никла запрещается изменение опорного сигнала нри номощи ключа 15 и разреиается изменение этого знака при помо1чи синхронного детектора 17 в занисимости от выходного сигнала D-триггера 31. Эта ситуация сохраняется до конца вспомогательного цикла. Происходит последовательное уменьшение уровня опорного сигнала и увеличение точности измерения времени с последовательной записью результатов в регистр 33 сдвига. На последнем 13-м микротакте D-триггер положительным фронтом нри- нимает состояние в соответствии с сигналом 42 и до конца- этого микротакта не меняется. Сигнал 40 управле
Q
55
нала 42 компаратора 20. Это приводит к тому, что синхронньш детектор 17 меняет знак сигнала 30 не в заданные сигналом 56, а в произвольные моменты времени. При этом выходное напряжение интегратора будет колебаться около нуля. Амплитуда колебашн зависит от гистерезиса компаратора 20 и может быть сделана достаточно малой. Период колебаний зависит от постоянной времени интегратора 19 и уровня
его входного сигнала. Этот сигнал к концу микротакта 13 стремится к нулю по синусоидальному закону. Предлагаемый процесс обеспечивает к началу нового цикла измерения близкое к нулм выходное напряжение интегратора 19. После окончания микротакта 13 выходной сигнал 45 логической матрицы 32 принимает единичное значение. При )о этом положительным фронтом этого сигнала происходит запись данных регистра 33 сдвига, реверсивного счетчика 34, счетчика 35 основного цикла и триггера 30 запуска в регистр 36 вы- 15 вода и одновременно с этим происходит запрос прерывания блока 25 через устройство 24 обмена. Кроме того, сигалом 45 происходит разрешение записи овых данных в регистр 26 режима, за- 20 прет счета счетчика 28 вспомогателього цикла и переключения триггера
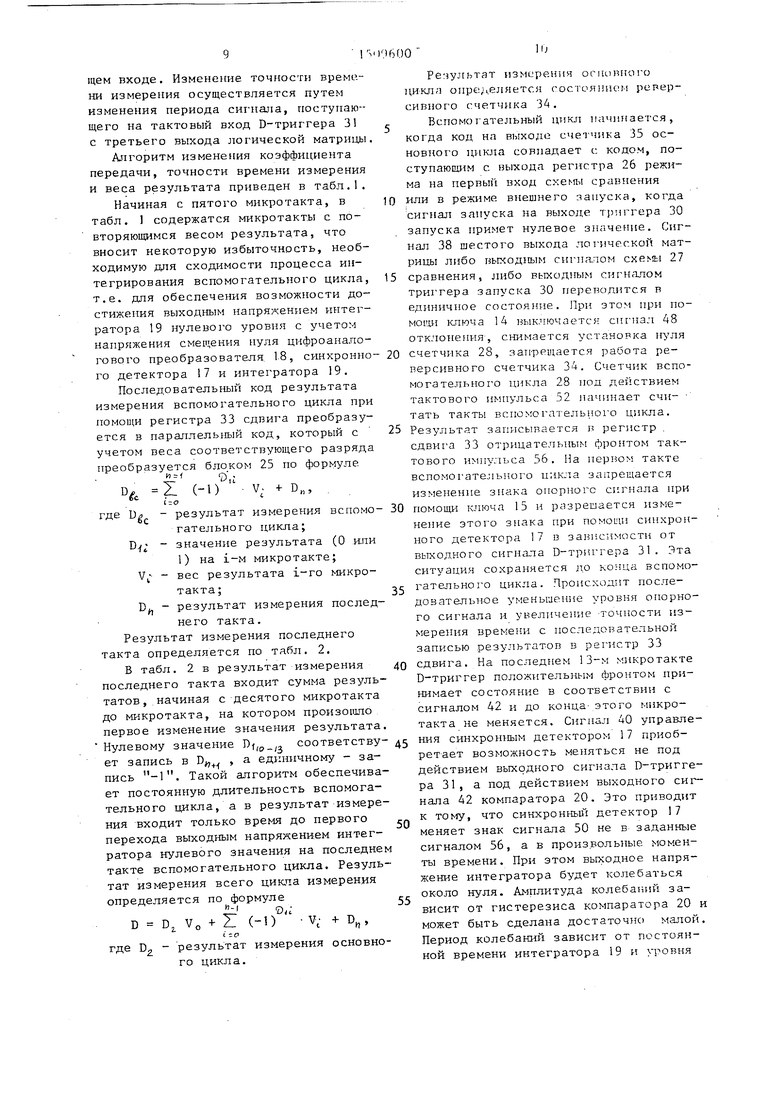
29четности. Если установлен режим внутреннего запуска (это соответствует сплошным линиям на фиг.5), то сигнал 38 принимает нулевое значение, при этом включается сигнал 48 отклонения, сбрасывается в ноль счетчик 28 вспомогательного цикла и разрешается абота реверсивного счетчика 34. Сиг- 30 нал 41 также принимает нулевое значеие. Вслед за этим через четверть ериода сигнал 57 принимает единичное значение на время, равное четверти периода. Это приводит к сбросу ре- з5 версивного счетчика 34 и счетчика 35 основного цикла. Если установлен реим внешнего запуска (это соответствует пунктирным линиям на фиг.5),
то сигнал 38 сохраняет свое единичное 40 значение до прихода сигнала запуска с выхода триггера 30 запуска. При этом напряжение на выходе интегратора 19 удерживается вблизи нулевого значения. С приходом сигнала запуска 45 с выхода триггера 30 запуска происходит уже описанный процесс. Триггер
30запуска осуществляет синхронизацию сигнала запуска с тактовым сигнаом 52, это означает, что запуск рас- Q ходомера происходит с задержкой, не превьш1ающей периода опорного сигнаа.
Элементы 17-19 имеют напряжения смещения нуля и связаны между собой 55 по постоянному току, что приводит к аддитивной погрешности результата измерения. Для исключения этой погрешности в соседних циклах измерения изменяют полярность интегрируемых сигналов и суммируют результаты соседних циклов, при этом, поскольку аддитивная погрешность входит в результаты соседних циклов с разными знаками и медленно меняется со временем, результат не содержит составляющую аддитивной погрешности, вызванную неидеальностью элементов 17-19. Поскольку суммирование соседних циклов осуществляется на каждом цикле и результат измерения каждого цикла используется дважды, быстродействие расходомера при этом не уменьшается. Изменение полярности сигналов осуществляется изменением фазы синхронного детектора 17, для чего необходимо инвертировать сигнал 40 в соседних циклах измерения. Для сохранения работоспособности схемы одновременно с этим должны инвертироваться сигналы 58 и 43. Эти операции выполняет .логическая матрица 32 под управлением сигнала, поступающего с выхода триггера 29 четности цикла.
В режиме внешнего запуска происходит несколько циклов измерения за один период сигнала запуска. Это вызвано необходимостью исключения аддитивной погрешности, вносимой элементами 17-19., Процесс измерения начинается, когда сигнал внешнего запуска принимает единичное значение,и продолжается до тех пор, пока сигнал внешнего запуска не примет нулевое значение. Процесс измерения состоит из нескольких циклов, длительность которых, кроме последнего, задается программно при помощи устройства 25. Количество циклов и длительность последнего цикла зависят от длительности сигнала внешнего запуска. Таким образом, пока сигнал внешнего запуска находится в единичном состоянии, происходит ряд циклов измерения, каждый из которых состоит из основного и вспомогательного циклов, причем дли- те:льность основного цикла задается программно соответствующей записью в регистр 26 режима. С переходом сигнала внешнего запуска в нулевое значение принудительно вкпючается вспомогательный цикл. Таким образом, длительность вспомогательного цикла всегда постоянна, а длительность основного цикла может зависеть от сигнала внешнего запуска. Поскольку результат измерения зависит от длитель
ности цирсла измерения, то и величина аддитивной составляющей погрешности последнего цикла также зависит от его длительности, поэтому исключить аддитивную погрешность последнего цикла суммированием оценок соседних циклов нельзя. Однако суммирование нормированных к длительности своего цикла оценок позволяет исключить ука- ванную погрешность. Оценка расхода, не зависящая от времени измерения, определяется по формуле
П
(-N-V;- . где D - результат измерения;
N - фактическая дпительность
основного 1р1кла; V - вес результата 0-го микротакта;d - динамический диапазон; d - максимальное значение динамического диапазона; m - мантисса оценки предыдущего
цикла; р - порядок оценки предыдущего
цикла;
k - масштабный коэффициент, определяемый калибровкой расходомера, Величина аддитивной составляющей погрешности этой оценки- от времени измерения не зависит. Произведя ряд измерений, получится последовательность оценок с постоянным (кроме по- следнего) периодом дискретизации, равным сумме длительностей основного и вспомогательного циклов измерения. Исключение аддитивной погрешности осуществляется путем суммирования (точнее - вычисления среднего) соседних циклов измерения исходной последовательности, причем, поскольку оценка каждого цикла используется дваясды, период дискретизации получаю цейся при этом последовательности, кроме первого и последнего интервалов, не изменится. В данном алгоритм дпительнрсть первого периода дискретизации новой последовательности взя та равной сумме первого периода и половине второго периода дискретизации исходной последовательности. Длительность последнего периода дискретизации новой последовательности анало- гично взята равной сумме половины предпоследнего периода и последнего периода дискретизации исходной последовательности . Тогда последовательность оценок интегрального расхода определяется рядом произведений усредненных оценок
Q. (1 1,2....,п)
на соответствующий период дискре- иза- ции
Q. - Q.-N,- (i 1,2n).
Суммарный интегральный расход определяется суммой п
Q, -i: a-N.-.
Необходимо знать фактическую длительность основного цикла последнего цикла измерения. Для этого в схеме выход триггера 30 запуска соединен с инверсным входом запрета счетчика основного цикла, поэтому с переходом сигнала запуска в ноль счетчик 35 основного цикла прекращает счет и его состояние, как и состояние триггера запуска, записывается положительным фронтом сигнала 45 в регистр 36 вывода. Посредством устройства 24 обмена эти данные передаются в устройство 25, где и осуществляется коррекция . Состояние триггера запуска анализируется программно до окончания процесса измерения. Если текущий окончился до конца сигнала внешнего запуска, то введенное состояние счетчика 35 основного цикла соответству- ;ет суммарной, длительности основнот о и вспомогательного циклов, выраженной в количестве периодов опорного сигнала. Это значение соответствует периоду дискретизации последовательности оценок интегрального расхода. На последнем цикле измерения состояние счетчика 35 соответствует интервалу времени от начала этого цикла до окончания всего процесса измерения, поэтому также соответствует периоду (последнему дискретизации последовательности оценок интегрального расхода. Для.вычисления этих оценок необходимо знать фактическую длительность основного цикла. Если сигнал окончится во время или после вспомогательного цикла текущего цикла измерения, то длительность основного цикла равна заданной и определяется данными, записанными в регистр 26 режима. Если сигнал внешнего запуска окончится во время основного цикла текущего измерения, то длительность основного цикла .определяется содержимым счетчика
Вычислительное устройство, выполненное в виде ЦВМ, содержащее блоки 59-81Jработает по программе измерения интегрального расхода, приведенной на фиг,6 и 7.
Массивы V и W формируются предварительно в соответствии с последней строкой табл. 1 и 2 соответственно.
В ведущей программе предусмотрена пауза (блок 60) на случай вывода данных блоком 59 во время незаконченного очередного цикла измерения из-за того, что данные .в регистр 26 режима могут попасть только по окончании очередного цикла измерения или в сое тоянии ожидания сигнала внешнего запуска. Блоком 67 и блоком 72 в цикле производится анализ и ввод- состояния триггера 30 запуска до окончания сиг нала внешнего запуска. В блоке 68 происходит уточнение результата измерения, связанное с нестандартной величиной последнего отрезка дискретизации.
В блоке 73 прерывающей программы осуществляется преобразование вида представления данных в форму, доступную соответствующему языку ЦВМ. При этом каждому элементу массива D, кроме последнего, соответствует один разряд регистра 33 сдвига. В послед НИИ элемент этого массива записывается результат измерения последнего такта вспомогательного цикла. Блока-ми 74 и 75 осуществляется преобразование в прямой код отрицательного числа, представленного в счетчике 34 в дополнительном коде. Если ЦВМ работает в дополнительном коде, блоки 74 и 75 должны быть .опущены.
Блоками 77-79 определяется фактическая длительность основного цикла измерения, как меньшее из значеьшя заданной длительности основного цикла и значения, равного состоянию счетчика основного цикла 35, введенного блоком 72.
Аналогичная программа может быть составлена для измерения среднего расхода.
С ростом частоты источника 1 питания напряжение на выходе интегратора 7 опорного сигнала пропорцио нально уменьшается. Это обстоятельство используется в режиме измерения среднего расхода, когда ключ 11 вы ключен и напряжение на. вход инвертора 13 поступает с выхода интегратора 7. Частотная зависимость опорного сигнала 49 компенсирует такую же зависимость основного сигнала таким об10 разом, что их отношение, а значит и оценка среднего расхода, не зависят от частоты. Сигнал 40 управления синхронным детектором 17 сформирован при помощи формирователя 21 тактовых
15 импульсов и схемы 22 управления из выходного сигнала интегратор 7, имеет равную с ним фазу. Поскольку фаза выходного напряжения интегратора от частоты не зависит, то подавление
20 квадратурной помехи основного сигнала, осуществляемое при помощи синхронного детектора 17, также не зависит от частоты.
В режиме измерения интегрального .25 расхода на вход инвертора 13 через включенный ключ 11 поступает сигнал с выхода фазовращателя 6. ; .Амплитуда выходного сигнала фазовращателя 6 не зависит от частоты и
30 имеет сдвиг по фазе относительно входного сигнала 90 . На входы суммирующего усилителя 10 отклонения поступают основной и опорньй сигналы, одинаково уменьшающиеся с ростом час25 тоты, что дает такую же частотную зависимость сигнала отклонения. Тогда отношение сигнала отклонения к частотно независи мому опорному сигналу 49 дает необходимую частотную за40 висимость оценки расхода, учитываю- частотную зависимость длительности цикла измерения. Однако с изменением частоты изменяется фаза сигнала на вьгходе фазовращателя и вследствие
45 этого возникает фазовый сдвиг между опорным сигналом 49 и сигналом 40 управления синхронного детектора, коэффициент передачи которого зависит от сдвига фаз. Поэтому изменение частосп ты приводит к изменению коэффициента передачи синхронного детектора, но чувствительность коэффициента передачи к изменению частоты при малых фа- зовь1Х сдвигах весьма мала, а погретГС ность коэффициента передачи синхронного детектора при симметричном доверительном интервале определяется
- ..- лty
выражением {Г + jSd-
1715
где е)ц - относительная погрешность частоты.
Отсюда следует, что при изменении частоты, например на 1%, погрешность коэффициента всего лишь 0,0025%.
При измерении нуля расходомера, когда остаточный сигнал преобразователя может менять свой знак, га1юч 9 измерения нуля отключает вход сумми- рующего усилителя 10 отклонения, при этом схема может измерять отрицатель ное отношение сигналов. Этот режим можно использовать также для измерения среднего значения знакопеременно- го расхода,.при этом диапазон измерения определяется только цифроанало- говым преобразователем 8 порядка.
Устройство имеет повышенную точность измерения, постоянную относи- тельную погрешность в заданном диапазоне расходов, автоматическую аддитивную коррекцию аддитивной погрешности измерительной схемы, простоту перехода от измерения среднего рас- хода к интегральному, цифровую форму представления результата измерения, гибкость и простоту программной перестройки режима измерения.
Формула изобретения
интегратор и компаратор, отличающий ся тем, что, с целью повышения точности измерения, в него введены фазовращатель, второй интегратор, инвертор, регистр ввода, первый, второй и третий усилители, первый, второй, третий и четвертый циф- роаналоговые преобразователи, третий и четвертьш ключи, формирователь тактовых импульсов, устройство управле- НИН, устройство обмена и вычислительное устройство, соединенное дайной обмена с устройством обмена, вход которого соединен с первой выходной
шиной устройства управления, а выход 55 триггеры, схему сравнения, реверсив- через регистр ввода соединен с первой ный счетчик, логическую матрицу, пер- входной шиной устройства управления, вый выход которой является одним из первый выход которого соединен с входом запроса прерывания устройства обвыводов второй выходной шины устройства управления, второй выход являет18
0 5
0
5
0
0
5
мет1а, вторая иьп:одная щни.э ус: ioii(;T- на управления со цинека с ц-цфро ым входом четвертого цкфроапсичоговси-о преобразователя, вход которого соединен с выходом синхронного детектора, а выход соединен с входом первого интегратора, третья выходная шина устройства управлеггия соединена с цифровыми входами первого, второго и третьего циФроаналоговых преобразователей, входы которых соепинешз соответственно с выходами первого, второго и третьего ус1шителей,, причем третья выходная шина отдельными выводами соединена с управляь ыими входами третьего и четвертого ключе, вторая входная шина устройства управления соединена с выходам формирователя тактовых импульсов, вход которого соединен с выходом второго интегратора, первым входом четвертого ключа и вторым входом третьего ключа, первый вход которого через фазовраша тель соединен с выходом первого цйф- роаналогового преобразователя и входом второго интегратора, а выход соединен с первым входом первого ключа непосредственно, а с вторым входом - через инвертор, выход второго цифро- аналогового преобразователя соединен с первым входом третьего усилителя, второй вход которого соединен с выходом четвертого ключа, входы первого и второго усилителей соединены с соответствующими выходами преобразователя расхода, вторые входы второго и четвертого ключей соединены с нулевой шиной, второй и третий выходы устройства управления соединены с управляющими входами синхронного детектора и первого ключа соответственно, выход компаратора соединен с входом устройства управления, четвертый выход ко- :торого соединен с управляющим входом второго ключа, первый вход которого соединен с выходом третьего цифроана- логового преобразователя.
триггеры, схему сравнения, реверсив- ный счетчик, логическую матрицу, пер- вый выход которой является одним из
выводов второй выходной шины устройства управления, второй выход является вторым выходом устройства управления, третий йыход соединен с тактовыми входами второго регистра и третьего триггера, четвертый выход соединен с информационным входом второго регистра, пятый выход соединен с входом управления реверсивного счетчика и является третьим выходом устройства управления, шестой выход соединен с входом запрета счета реверсивного счетчика, восьмым входом логической матрицы, входом сброса первого счетчика и является четвертым выходом устройства управления, седьмой выход соединен с входами сброса реверсивного и второго счетчиков, восьмой выход соединен с тактовыми входами первого триггера и третьего регистра, , входом установки первого регистра, входом запрета первого счетчика, девятым входом логической матрицы и является выходом запроса прерывания устройства управления, вход которого соединен со вторым входом логической матрицы и с информационным входом третьего триггера, выход которого соединен с первым входом логической матрицы, третий .вход которой соединен
с второй входной шиной устройства уп- 30 нена с входами первого регистра,
Таблица I
Примечание. 1,1 - номер такта и микротакта соответственно;
k - коэффициент передачи цифреаиалогового преобразователя веса; at, Т - длительность микротакта и такта соответственно; V - вес результата.
равления, один из выводов которой соединен с тактовыми входами первого второго и реверсивного счетчиков и второго триггера, выходы первого регистра соединены с третьей выходной шиной устройства управления и входом схемы сравнения, второй вход которой соединен с выходом второго счетчика, а выход соединен с четвертым входом логической матрицы, пятый вход которой соединен с выходами первого счетчика и второй выходной шиной устройства управления, один из выводов первого регистра соединен с установоч- ым входом второго триггера, D-вход которого является входом запуска уст- рьйства управления, а выход соединен с входом запрета второго счетчика, одним из входов третьего регистра и седьмым входом логической матрицы, шестой вход которой соединен с выходом первого триггера, выходы второго регистра, второго счетчика и реверсивного счетчика соединены с соответствующими входами третьего регистра, выход которого является первой выходной шиной устройства управления, первая, входная шина которого соедиТаблица 2
Л
38 39 42
tiO
V J
wej
Щ 1 Г
1I L
зг
39ч
. uггглJггmJтлJlпJггmJт ( г
53-1 Т
--
1 n J LJnLJinjUlJlJTJTJinJlJ U L .J L K-.QJ(LL x ..
-1-
J3Q
1509600
J L
ML
фиг. ft
J3Q.
| Герасимчук В., Мейстер А | |||
| Интегрирующие цифровые электромагнитные расходомеры | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Росток, ГДР, 1983 | |||
| Цифровое измерительное устройство расходомера | 1977 |
|
SU909573A2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
