.Изобретение относится к весоизмерительной технике и в частности к электронным весам с чувствительным элементом на упругих опорах.
Цель изобретения - повышение быстродействия подбора упругих опор чувствительного элемента и повышение точности измерения.
На чертеже показана схема устройства для определения жесткости упругих опор.
Устройство содержит упругую опору I, электромагнитную систему 2 с сердечником 3, возбуждаемую усилите- .лем 4 переменного тока, датчик 5 обратной связи, измеритель 6 частоты, вычислительное устройство.7 с цифро- печатающим устройством 8. На упругой опоре на базовой поверхности, к ко
25
торой крепятся детали чувствительного элемента, закреплена ферромагнитная пластина 9.
Второй базовой поверхностью упругая опора 1 крепится к стойке 10 таким же образом, как и к деталям чувствительного элемента, сохраняя та- кяе же базовые поверхности, при этом расстояние между торцом стойки 10 и ферромагнитной пластиной 9 равно рас- 30 стоянию между торцами деталей чувствительного элемента, связанными упругой опорой.
Электромагнитная система 2 закреплена на стойке 10 так, чтобы ферро- 35 магнитная пластина 9 бьша строго над сердечником 3. Дпя определения в вы-, числительном устройстве 7 жесткости разных по размерам и массе упругих опор i устройство снабжено- датчиком 40 11 программы, в который вносят параметры, упругой опоры 1 и ферромагнитной пластины 9, то есть устройство имеет широкий диапазон измерения жесткости разных по размерам и массе 45 упругих опор I.
Способ подбора упругих опор чувствительного элемента реализуется следующим образом.
Одну иэ базовых поверхностей уп- 0 ругой опоры 1 снабжают ферромагнит- иой пластиной 9, вторую базовую поверхность крепят на стойке 10 иден- , зтнчно кр.еллению в чувствительном эле-
m - суммарная масса свободной к леблющейся части; га - масса свободной колеблющейс
части упругой опоры; т - масса ферромагнитной пласти ны;
С - жесткость упругой опоры, пр веденная к точке приложения возмущающегося воздействия, Н/м;
f - частота собственных колебаний системы, Гц-, определяет ся в измерителе 6 частоты. Из формулы определения частоты
нетрудно определить искомую жесткос С 4п 2mf , которая определяется в вычислительном устройстве 7, в кото рое поступает значение частоты из и мерителя 6 частоты, а значение исхо ных масс из задатчика 11 программы.
Для автоматизации процесса подбо ра упругих опор значения их жесткос ти передаются в цифропечатающее уст ройство 8.
Зная заданную жесткость чувствительного элемента и геометрические размеры его, легко определить предельные значения жесткостей упругих опор, при которых суммарная количес венная жесткость их будет в предела допуска заданной жесткости чувствительного элемента. Поэтому после оп ределения жесткости упругих опор, производят групповую подборку упруг опор с одинаковой жесткостью и с су
менте так, чтобы ферромагнитная плас-55 марной количественной жесткостью в
тииа 9 была над сердечником 3 электромагнитной системы 2. С усилителя 4 переменного тока поступает ток на электромагнитную систему 2, в которой
пределах допуска заданной жесткости чувствительного элемента, детали ко торого связывают упругими опорами о ной группы.
0
5
0
создается магнитный поток, притягивающий ферромагнитную пластину 9 к сердечнику 3, перемещение ферромагнитной пласти1а1 9 вблизи датчика 5 обратной связи вызывает появление на его выходе приращения напряжения, усиливаемого усилителем 4 переменно го тока, что вызывает возникновение автоколебаний на собственной частоте подвижной системы, частота которой определяется выражением
f Г
- -2ТГ Гш
где f - частота собственных колебаний подвижной части упругой опоры с ферромагнитной пластиной 18;
m - суммарная масса свободной колеблющейся части; га - масса свободной колеблющейся
части упругой опоры; т - масса ферромагнитной пластины;
С - жесткость упругой опоры, приведенная к точке приложения возмущающегося воздействия, Н/м;
f - частота собственных колебаний системы, Гц-, определяется в измерителе 6 частоты. Из формулы определения частоты
нетрудно определить искомую жесткость С 4п 2mf , которая определяется в вычислительном устройстве 7, в которое поступает значение частоты из измерителя 6 частоты, а значение исходных масс из задатчика 11 программы.
Для автоматизации процесса подбора упругих опор значения их жесткости передаются в цифропечатающее устройство 8.
Зная заданную жесткость чувствительного элемента и геометрические размеры его, легко определить предельные значения жесткостей упругих опор, при которых суммарная количественная жесткость их будет в пределах допуска заданной жесткости чувствительного элемента. Поэтому после определения жесткости упругих опор, производят групповую подборку упругих опор с одинаковой жесткостью и с суммарной количественной жесткостью в
пределах допуска заданной жесткости чувствительного элемента, детали кот торого связывают упругими опорами одной группы.
5I
Формула изобретения
Способ подбора упругих опор чувствительного элемента, заключающийся в том, что измеряют жесткость чувствительного элемента, после чего производят подбор упругих опор Ad достижения заданной жесткости чувствительного элемента, отли чающий- с я тем, что, с целью повышения оперативности подбора упругих опор чувствительного элемента, предварительно на одну из боковых поверхностей зшругой опоры устанавливают ферромагнитную пластину, а другую закрепляют
096056.
на стойке идентично креплению в чув- ствитехиэном элементе, затем с помощью электромагнитной системы вогзбуждают колебания снободиого конца упругой опоры на собственной резонансной частоте, по результатам измерения которой определяют жесткость упругой опоры, после чего -аналогично опреде1Q ляют жесткость партии упругих опор, производят их подборку по группам с одинаковой жесткостью и с суммарной количественной жесткостью в пределах допуска заданной жесткости чувствиJ5 тельного элемента, а подбор упругих опор осуществляют из одной группы.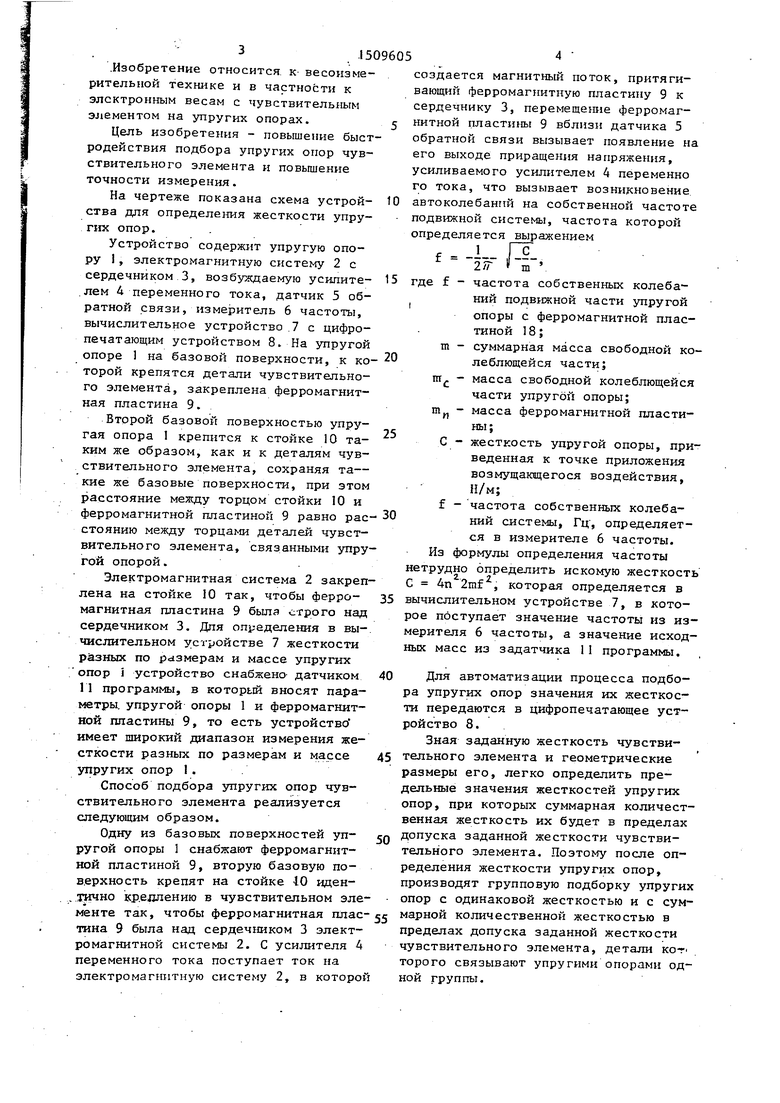
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подбора упругих опор чувствительного элемента | 1988 |
|
SU1516791A1 |
| ГИРОСКОПИЧЕСКИЙ ИЗМЕРИТЕЛЬ | 2015 |
|
RU2610389C1 |
| Тренажер для акробатов | 1986 |
|
SU1358974A2 |
| Устройство для моделирования колебательных объектов | 1982 |
|
SU1092531A1 |
| Вибрационный вискозиметр и способ его регулировки | 1989 |
|
SU1742676A1 |
| Электромагнитный измерительный механизм | 1985 |
|
SU1260860A1 |
| ГИРОСКОП | 2019 |
|
RU2728733C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МАССЫ ОБЪЕКТА | 1993 |
|
RU2075732C1 |
| Измеритель давления | 1984 |
|
SU1326920A1 |
| СТАНОК ДЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ ИЗДЕЛИЙ | 2010 |
|
RU2455624C2 |
Изобретение относится к весоизмерительной технике, в частности к электронным весам с чувствительным элементом на упругих опорах, и позволяет повысить быстродействие подбора упругих опор чувствительного элемента и повысить точность измерения. Устройство содержит упругую опору 1, электромагнитную систему 2 с сердечником 3, возбуждаемую усилителем 4 переменного тока, датчик 5 обратной связи, измеритель 6 частоты, вычислительное устройство 7 с цифропечатающим устройствам 8, ферромагнитную пластину 9, стойку 10, задатчик программы 11. На одной из базовых поверхностей упругой опоры 1 закрепляют ферромагнитную пластину 9 так, чтобы она была над сердечником 3 электромагнитной системы 2. Вторую базовую поверхность крепят на стойке 10. С усилителя 4 поступает ток на электромагнитную систему 2, создаваемый магнитный поток притягивает ферромагнитную пластину 9 к сердечнику 3 и вызывает на выходе датчика 5 обратной связи приращения напряжения, усиленного усилителем 4, что вызывает возникновение автоколебаний на собственной частоте подвижной системы, которая измеряется в измерителе 6, сигнал с выхода которого поступает на вход вычислительного устройства, где происходит определение жесткости упругой опоры. На второй вход вычислительного устройства подается сигнал с задатчика программы. Значения жесткости передаются в цифропечатающее устройство 8. 3 ил.
| Автоматические весы | 1983 |
|
SU1154542A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
