Изобретение относится к приборостроению и может использоваться при создании бескарданных гироскопов на сферической шарикоподшипниковой опоре, которые могут применяться, например, в качестве чувствительных элементов гиростабилизаторов или двухканальных измерителей угловой скорости.
Известен трехстепенной гироскоп [1], содержащий корпус, гиромотор, карданов подвес, датчики угла и датчики момента, повернутые относительно друг друга на 90° вокруг продольной оси гироскопа.
Основным недостатком данного гироскопа является наличие карданова подвеса, что обуславливает значительный дрейф гироскопа из-за необходимости применения токоподводов для подачи электропитания на обмотки гиромотора и шарикоподшипников для обеспечения вращения рамок карданова подвеса.
Наиболее близким, по технической сущности, к заявленному устройству является гироскоп [2], содержащий корпус с расположенным внутри него гиродвигателем, включающим статор с катушками и ротор на сферической шарикоподшипниковой опоре, трансформаторно-индуктивные датчики угла и электромагнитные датчики момента, размещенные на корпусе гироскопа напротив торцевой части ротора.
Недостатком данного гироскопа является нелинейная (квадратичная) характеристика датчика момента, не позволяющая его применение в качестве чувствительного элемента гиростабилизатора или двухканального измерителя угловой скорости без использования дополнительных вычислительных устройств, линеаризующих статическую характеристику датчика момента.
Задачей, на решение которой направлено изобретение, является снижение аппаратных затрат при использовании предложенного гироскопа, например, в качестве чувствительного элемента гиростабилизатора, за счет исключения дополнительных вычислительных устройств, необходимых для линеаризации статической характеристики датчика момента гироскопа.
Технический результат заключается в снижении аппаратных затрат за счет исключения дополнительных вычислительных устройств.
Поставленная задача для гироскопа, содержащего корпус с расположенным внутри него гиродвигателем, включающим статор с катушками и ротор на сферической шарикоподшипниковой опоре, трансформаторно-индуктивные датчики угла и электромагнитные датчики момента, размещенные на корпусе гироскопа напротив торцевой части ротора, решается за счет того, что на сердечниках электромагнитного датчика момента установлены по две обмотки: обмотка возбуждения и обмотка управления, причем направление обмоток, расположенных на одном сердечнике, совпадает, а направление обмоток, расположенных на другом сердечнике, противоположно, при этом обмотки возбуждения между собой и обмотки управления между собой соединены последовательно.
К существенным отличиям предложенного гироскопа по сравнению с известным является размещение на каждом сердечнике электромагнитного датчика момента двух обмоток: возбуждения и управления, причем направление обмоток, расположенных на одном сердечнике, совпадает, а направление обмоток, расположенных на другом сердечнике, противоположно; и последовательное соединение обмоток возбуждения между собой и обмоток управления между собой между собой, что позволяет реализовать линейную зависимость создаваемого момента от тока управления, а не квадратичную, как в устройстве-прототипе.
Изобретение поясняется чертежами.
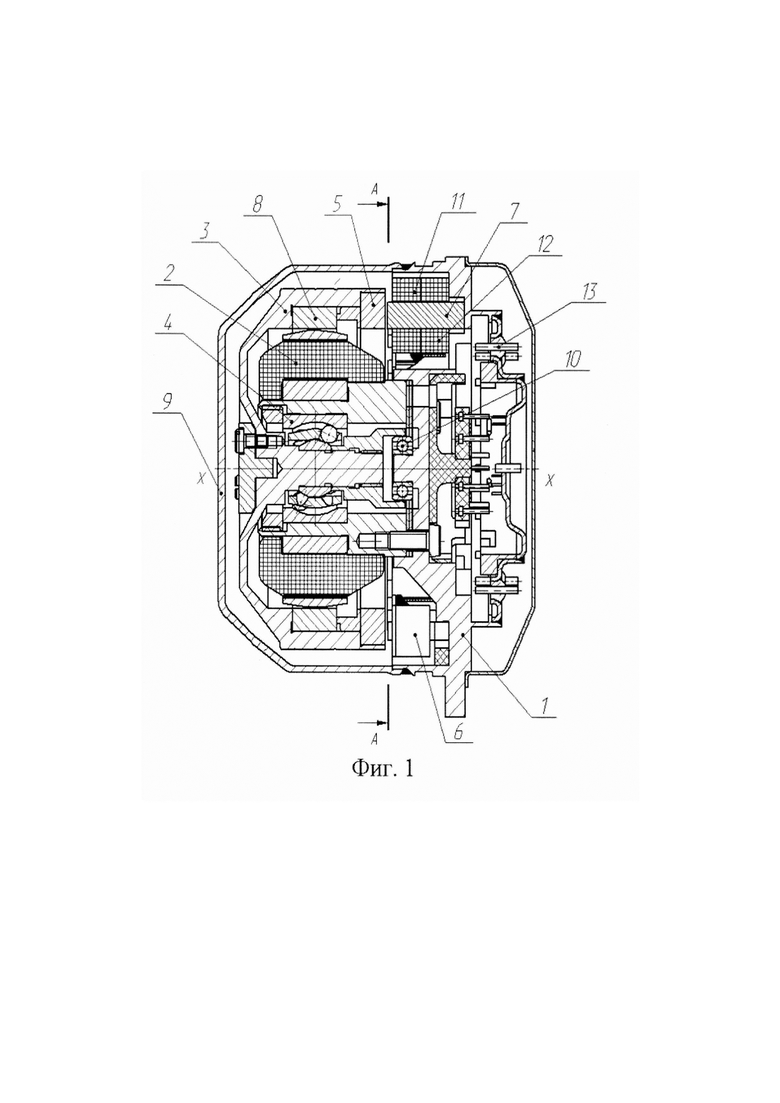
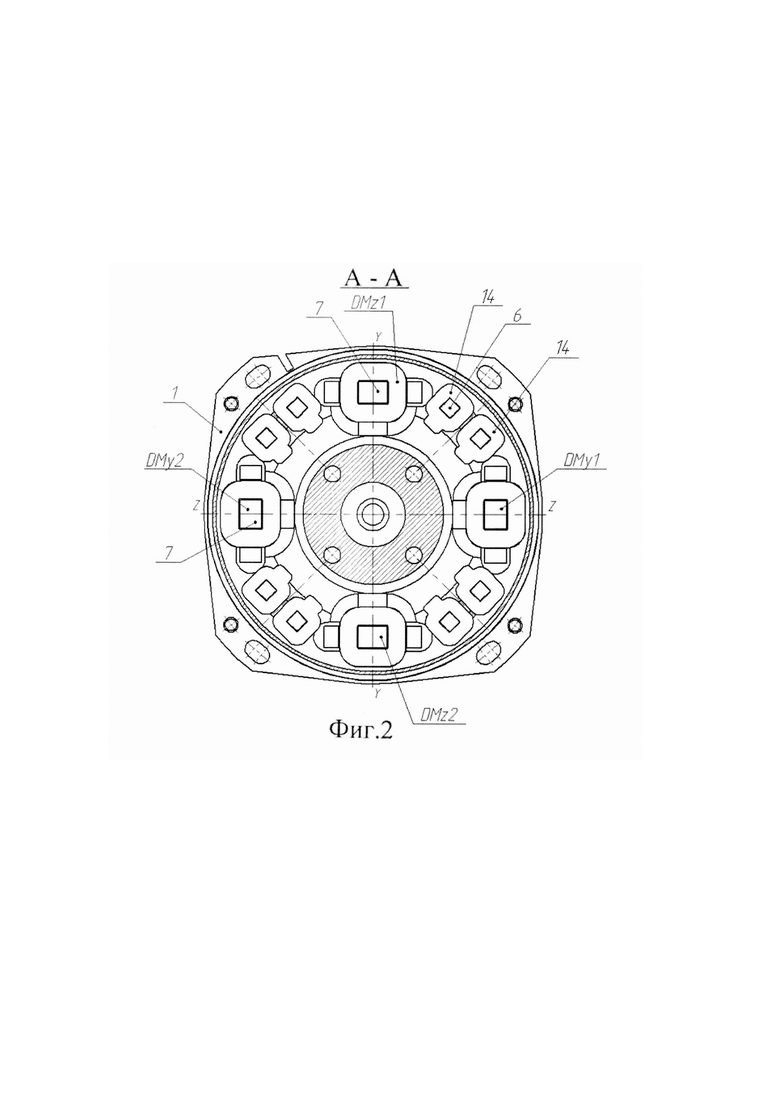
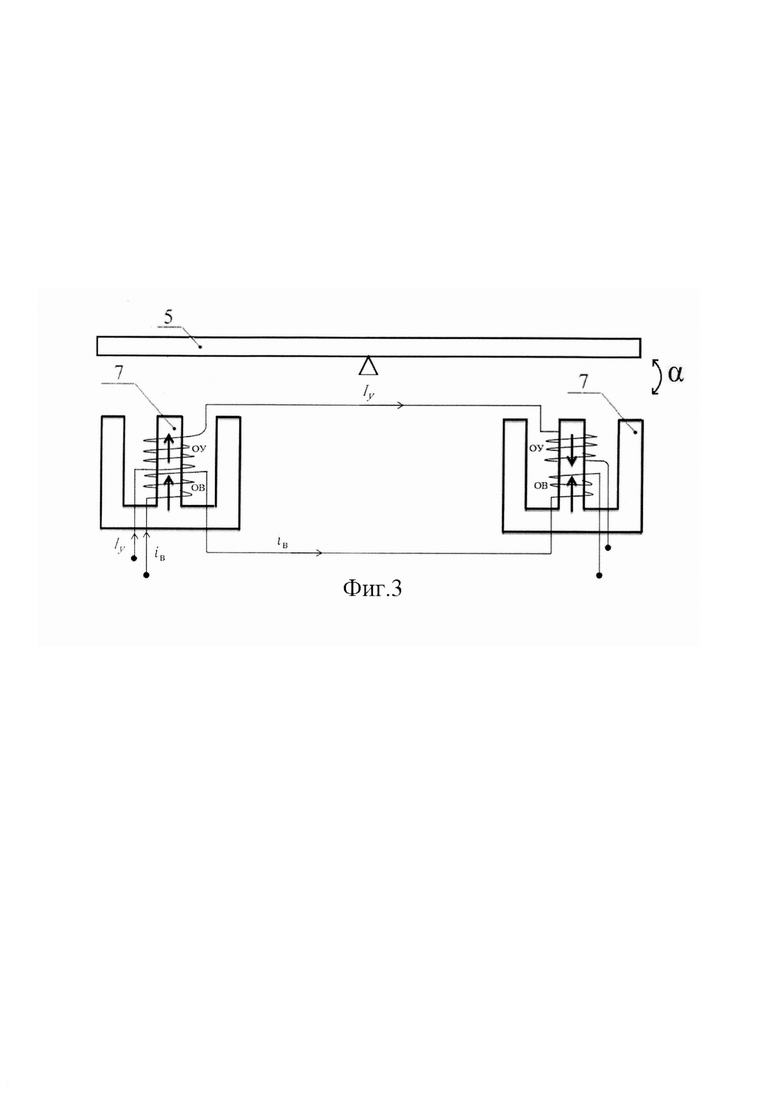
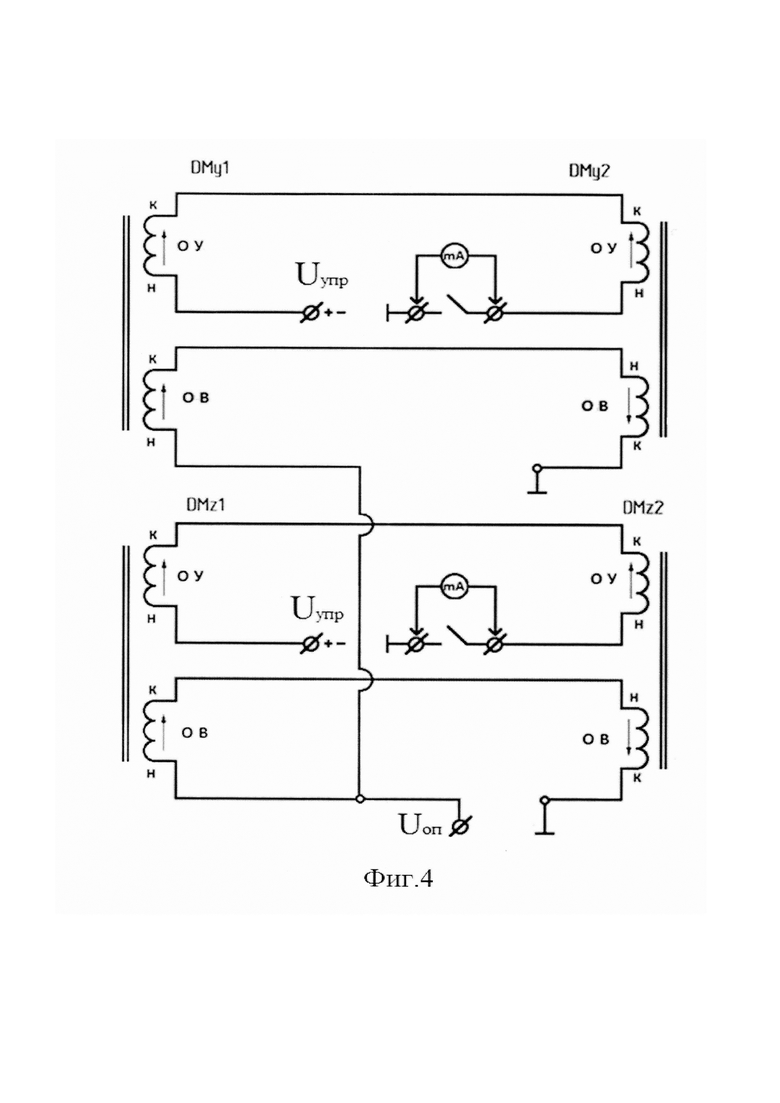
На фиг. 1 представлен предложенный гироскоп вид сбоку в разрезе; на фиг. 2 - вид гироскопа в сечении по линии А-А; на фиг. 3 - схема построения моментного преобразователя; на фиг. 4 - электрическая схема соединений моментного преобразователя.
В предложенной схеме реализации гироскопа ротор 3 гироскопа (с гистерезисным кольцом 8 и кольцом 5, расположенным в торцевой части ротора) имеет колоколообразную форму и установлен во внутреннее кольцо сферической шарикоподшипниковой опоры 4. Сферическая шарикоподшипниковая опора 4 обеспечивает три степени свободы ротора 3, допуская неограниченный угол поворота вокруг собственной оси вращения (оси X) и ограниченные углы (±40') поворота вокруг двух других осей (Y и Z). Ротор 3 приводится во вращение гиродвигателем, статор 2 которого установлен на наружном кольце сферической шарикоподшипниковой опоры 4. Радиальный шарикоподшипник 10 выполняет роль упора и служит для ограничения углов поворота ротора 3 вокруг осей Y и Z.
Для регистрации угла поворота ротора 3 вокруг измерительных осей Y и Z предназначены датчики 6 угла, неподвижная (статорная) часть которых выполнена, например, в виде П-образного сердечника, на который надеты две одинаковые катушки 14, одна из этих катушек является обмоткой возбуждения, а вторая - сигнальной обмоткой. Датчик 6 угла по каждому каналу содержит два таких сердечника с катушками 14, расположенных диаметрально и смещенных относительно осей чувствительности гироскопа на угол 45° (фиг. 2). Сигнальные обмотки соединены последовательно встречно так, что наводимые в них ЭДС вычитаются.
Для создания управляющих моментов используются электромагнитные датчики 7 момента DMy1, DMy2, DMz1, DMz2, работающие на постоянном токе. Конструктивно датчик 7 момента содержит по каждому каналу два диаметрально расположенных на корпусе 1 и совмещенных с осями чувствительности гироскопа сердечника, например, Ш-образной формы. На средний стержень каждого сердечника 7 датчика момента установлены две обмотки: обмотка 12 возбуждения (ОВ) и обмотка 11 управления (ОУ), причем направление обмоток, расположенных на одном сердечнике, совпадает, а направление обмоток, расположенных на другом сердечнике, противоположно, причем направление обмоток, расположенных на одном сердечнике, совпадает, а направление обмоток, расположенных на другом сердечнике, противоположно, при этом обмотки возбуждения между собой и обмотки управления между собой соединены последовательно (фиг. 3, фиг. 4). Обмотки возбуждения подключены к источнику постоянного напряжения Uon, обеспечивающего протекание в обмотках возбуждения постоянного тока iB. Создание управляющих моментов обеспечивается подачей в обмотки управления тока управления Iy.
Значение момента, создаваемого датчиком момента по каждому каналу, определяется разностью:

где М1 и М2 - моменты, создаваемые первым и вторым сердечниками одного канала;
WΣ1, WΣ2 - суммарная энергия магнитного поля в зазоре между сердечником и ротором соответственно для первого и второго сердечника;
α - угол поворота ротора гироскопа.
Энергии магнитного поля в зазоре между сердечником и ротором соответственно для первого и второго сердечника равны:


где wв,wу - число витков обмотки возбуждения и обмотки управления соответственно;
GΣ1,GΣ2 - значение суммарной магнитной проводимости для первого и второго сердечника соответственно.
Таким образом, с учетом (2), (3) момент, создаваемый датчиком момента по каждому каналу, равен:

При нулевом положении ротора суммарные магнитные проводимости для первого и второго сердечников одинаковы:

а их производные по углу поворота а отличаются знаком, который учитывается при вычитании моментов (1). При этом для датчика момента по каждому каналу зависимость (4) момента от тока управления является линейной:

Подвижным элементом (ротором), общим для датчиков 6 угла и датчиков 7 момента, является кольцо 5 из магнитного материала, располагаемое в торцевой части ротора 3 гироскопа.
Гироскоп закрыт кожухом 9, выполнен герметичным и заполнен гелиеводородной смесью до давления, например, 750 мм рт.ст. в целях снижения аэродинамического момента сопротивления и его влияния на дрейф гироскопа (через проекции этого момента на оси чувствительности гироскопа). Для съема и подачи электрических сигналов служат гермовводы 13.
Гироскоп работает следующим образом.
В нулевом положении, в силу симметрии, выходной сигнал с датчиков 6 угла отсутствует. В режиме измерения при наличии угловой скорости, например, относительно оси Y корпус 1 гироскопа начинает поворачиваться относительно этой оси, а ротор 3 будет стремиться сохранять неизменным в инерциальном пространстве направление вектора кинетического момента. Зазоры между магнитным кольцом 5 и торцевыми поверхностями сердечников датчиков 6 угла изменятся, и на выходе датчика 6 угла появится сигнал, амплитуда которого пропорциональна измеряемому углу, а фаза определяет знак углового перемещения. Данный сигнал выпрямляется и подается в обмотки управления датчика момента по оси Z, при этом ротор 3 по правилу прецессии будет поворачиваться вокруг оси Y, стремясь уменьшить до нуля рассогласование на датчике 6 угла.
Мерой угловой скорости является ток в обмотке управления. Зависимость угловой скорости от тока является линейной:

где Н - вектор кинетического момента ротора гироскопа.
При использовании гироскопа в качестве чувствительного элемента гиростабилизатора в режиме управления при необходимости разворота гироплатформы, например, относительно оси Y управляющий сигнал подается в обмотки 11 управления датчика момента (Фиг. 1) по оси Z. Создается момент, стремящийся развернуть ротор 3 относительно оси Z, при этом ротор 3 по правилу прецессии будет поворачиваться относительно оси Y. На выходе датчика 6 угла Y появится сигнал, который выпрямляется и подается, например, на двигатель разгрузки, разворачивающий платформу, таким образом, чтобы уменьшить до нуля рассогласование на датчике 6 угла. При этом обеспечивается линейность закона управления:

где ωупр - скорость управления,
I упр - управляющий сигнал (ток в обмотках управления датчика момента).
Таким образом, в сравнении с прототипом использование предлагаемого устройства в качестве чувствительных элементов гиростабилизаторов обеспечивает линейный закон управления, а при использовании предлагаемого устройства в качестве двухканального измерителя угловой скорости обеспечивает линейность выходной характеристики датчика без применения дополнительных вычислительных устройств. Подтверждено экспериментально.
Источники информации
1. АС СССР №431808 Трехстепенный гироскоп // МПК G01C 19/00, заявлено 26.11.1971 г.
2. Патент РФ №2460040, МПК G01C 19/02, 2006 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИРОСКОП (ВАРИАНТЫ) | 2011 |
|
RU2460040C1 |
| ГИРОСКОП | 2010 |
|
RU2446382C1 |
| ГИРОСКОП (ВАРИАНТЫ) | 2005 |
|
RU2308680C2 |
| ГИРОСКОП | 2021 |
|
RU2771918C2 |
| Двухканальный датчик угловой скорости | 2019 |
|
RU2725880C1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1999 |
|
RU2158902C1 |
| Устройство угловой стабилизации вращающегося реактивного снаряда | 2020 |
|
RU2761912C1 |
| ДАТЧИК УГЛОВОЙ СКОРОСТИ НА БАЗЕ МОДУЛЯЦИОННОГО ГИРОСКОПА | 2004 |
|
RU2276773C2 |
| Гироскопический стабилизатор | 1986 |
|
SU1839920A1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП | 1999 |
|
RU2173446C2 |
Изобретение относится к приборостроению и может использоваться при создании бескарданных гироскопов на сферической шарикоподшипниковой опоре. Гироскоп содержит корпус с расположенным внутри него гиродвигателем, включающим статор с катушками и ротор на сферической шарикоподшипниковой опоре, трансформаторно-индуктивные датчики угла и электромагнитные датчики момента, размещенные на корпусе гироскопа напротив торцевой части ротора, при этом на сердечниках электромагнитного датчика момента установлены по две обмотки: обмотка возбуждения и обмотка управления, причем направление обмоток, расположенных на одном сердечнике, совпадает, а направление обмоток, расположенных на другом сердечнике, противоположно, при этом обмотки возбуждения между собой и обмотки управления между собой соединены последовательно. Технический результат - снижение аппаратных средств. 4 ил.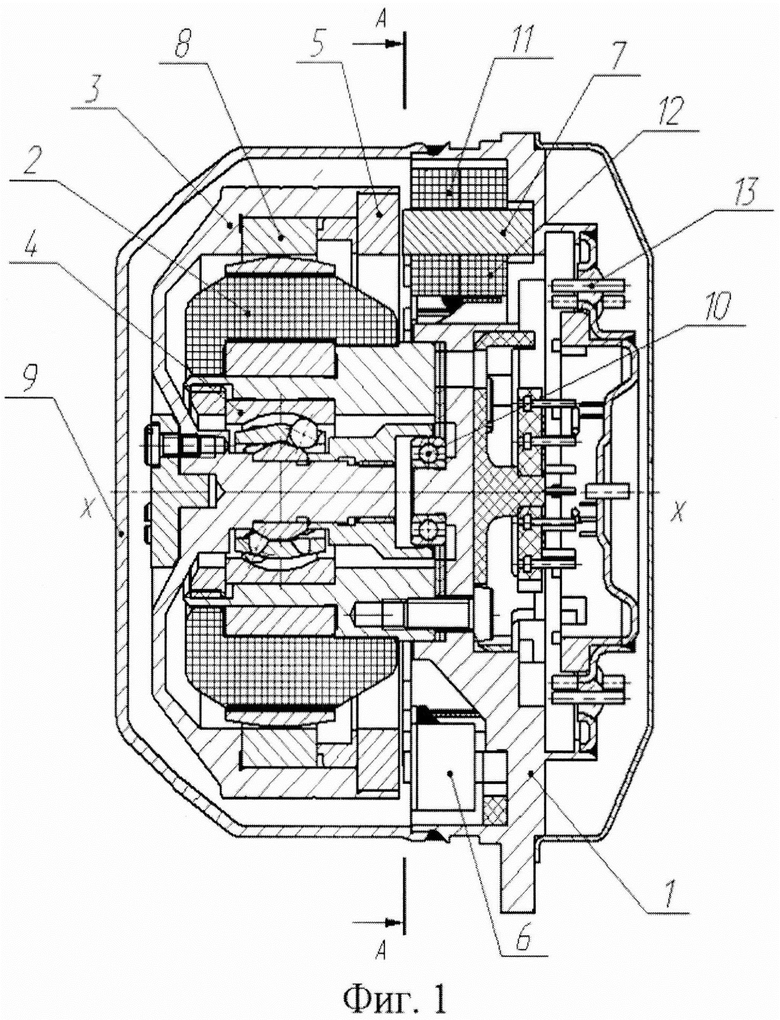
Гироскоп, содержащий корпус с расположенным внутри него гиродвигателем, включающим статор с катушками и ротор на сферической шарикоподшипниковой опоре, трансформаторно-индуктивные датчики угла и электромагнитные датчики момента, размещенные на корпусе гироскопа напротив торцевой части ротора, отличающийся тем, что на сердечниках электромагнитного датчика момента установлены по две обмотки: обмотка возбуждения и обмотка управления, причем направление обмоток, расположенных на одном сердечнике, совпадает, а направление обмоток, расположенных на другом сердечнике, противоположно, при этом обмотки возбуждения между собой и обмотки управления между собой соединены последовательно.
| ГИРОСКОП (ВАРИАНТЫ) | 2011 |
|
RU2460040C1 |
| ГИРОСКОП | 2010 |
|
RU2446382C1 |
| МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП | 2010 |
|
RU2485444C2 |
| JP 60237313 A, 26.11.1985. | |||

