ел
со
NU
ГчЭ
Изобретение относится к устройствам для дистанционного управления планиров111;иками полей, а также строительными, землеройными и другими ма- шинами.
Целью изобретения является расширение зоны управления, повышение точности устройства, а также возможност управления движением машины по заданной прямой.
На фиг. 1 представлено устройство, общий вид; на фиг. 2 - разрез А-А на фиг. 1.
Устройство содержит общий корпус 1, дополнительный корпус 2, прожектор 35. включающий два светодиода, разделительную зеркальную призму, объектив и блок питания (не показаны), карданный подвес 4, плоское зеркало 5, ре- гулирующий винт 6 со шкалой уклона, призму-куб 7, круглый уровень 8, цилиндрический элемент 9 (например, из стекла или пластмассы), ось 10 вращения призмы-куб, связанную посредством зубчатой передачи 11 с двигателем 12 поворота, подшипник 13, масляньш демпфер 14, кольцо 15 карданного механизма,, балансировочные грузики 16, фиксатор 17 положения призмы-куб 7, а в дополнительном корпусе вьшол- нено окно 18 для прохода луча прожектора.
Устройство устанавливается в нужном пункте местности на обычном гео- дезическом штативе на требуемой высоте. Благодаря карданному подвесу 4 прожектор 3 и ось 10 вращения призмы- куб 7 автоматически занимают вертикальное положение, а. масляный демп- фер 14 сокращает время прихода дополнительного корпуса 2 в вертикаль. Балансировочные грузики 16-позволяют правильно отбалансировать вертикальное положение оси вращения. При включении двигателя 12 поворота призма-куб 7 начинает равномерно вращаться с регулируемой скоростью, причем излучаемый вертикально прожектором 3 луч, отклоненный плоским зеркалом 5 в горизонт или под нужным углом, вращается призмой-куб 7 с удвоенной скоростью и, встречая на своем пути связанную с рабочим органом машины приемную часть, подает сигнал для ав томатического подъема или опускания рабочего органа для вьтолнения заданного профиля обрабатываемой поверхности. При установке шкалы укло
0
5 5 0 5
нуль
на регулирующего винта 6 на плоскость вращения оси луча горизонтальна, а при наклоне плоского зеркала 5 плоскость вращения управляющего луча становится наклонной, соответственно, изменяется и профиль обрабатываемой поверхности. На нижней проекции (фиг.1) видно, что рабочий угол управляющего луча при выбранных размерах оптической схемы ограничен + 125°, таким образом, угол управления может достигать . Устройство может быть применено и для управления движением машины по заданной прямой, для чего призма-куб 7 останавливается в нулевом положении при помощи поворота фиксатора 17 положения. Для защиты призмы-куб 7, механизмов ее вращения и наклона плоского зеркала 5 дополнительный корпус 2 устройства имеет цилиндрический элемент 9, охватывающий угол управления, к которому предъявляются требования отсутствия искажений луча в вертикальной плоскости (отсутствия пирамидальности), такие же требования предъявляются к самой при- зме-куб 7 (требования к качеству призмы и защитного стекла в горизонтальной плокости гораздо ниже, так как эти дефорь ации управляющего луча не влияют на точность управления по вертикали) .
Формула изобретения
1. Устройство для перемещения управляющего луча при дистанционном управлении движением машин по заданной плоскости, содержащее обшлй корпус с установленным в нем прожектором, включающим два светодиода, разделительную зеркальную призму, объектив и блок питания прожектора,о т л и ч а ю- щ е е с я тем,что,с целью расширения зоны управления и повышения точности устройства, в него введены дополни- тельньш корпус с окном, связанный с основным корпусом посредством карданного подвеса с возможностью установки его продольной оси в вертикальное положение, призма-куб, расположенная в дополнительном корпусе и связанная посредством зубчатой передачи с двигателем поворота, с возможностью вращения вокруг своей вертикальной оси, плоское зеркало, связанное с регулирующим винтом с возможностью изменения угла наклона, причем
515
установленные в дополнительном корпусе прожектор и призма-куб соосны его продольной оси, а окно вьшолнено цилиндрической формы с установленным в нем цилиндрическим элементом с оптической плотностью, обеспечивающей пропускание управляющего луча.
2, Устройство по П.1, о т л и
ю щ е е с я тем, что на до
полнительном корпуса установлены масляный демпфер и балансированные грузики.
3. Устройство по пп. 1 и 2, о т - ли ч ающееся тем, что, с целью управления движением машины по заданной прямой, на дополнительном корпусе установлен фиксатор положения призмы-куб.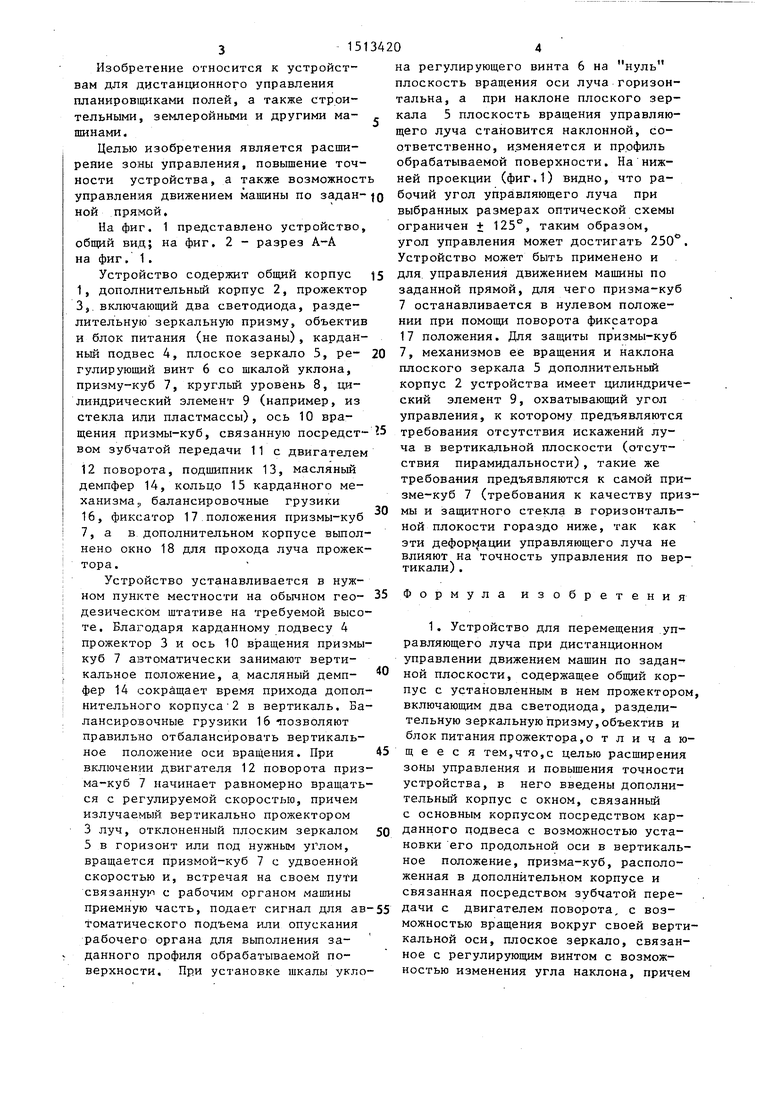
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для параллельной установки оптических осей нескольких оптических приборов | 1983 |
|
SU1083086A1 |
| Устройство для дистанционного управления оптическим лучом движением машин в заданной плоскости | 1987 |
|
SU1548775A1 |
| УСТРОЙСТВО ДЛЯ ЗАДАНИЯ ПЛОСКОСТИ ГОРИЗОНТА | 1995 |
|
RU2097698C1 |
| ТЕПЛОПЕЛЕНГАТОР | 2011 |
|
RU2458356C1 |
| Устройство для задания опорной световой плоскости | 1987 |
|
SU1493869A1 |
| СТАБИЛИЗИРОВАННОЕ ТЕПЛОВИЗИОННОЕ УСТРОЙСТВО НАВЕДЕНИЯ | 1995 |
|
RU2099750C1 |
| Устройство автоматической юстировки двухзеркальной телескопической системы с заданным направлением выходного излучения относительно направления визирования | 2023 |
|
RU2820599C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДИАМЕТРА И «ВЫЛЕТА» ДИСКА АВТОМОБИЛЬНОГО КОЛЕСА НА БАЛАНСИРОВОЧНОМ СТАНКЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2365887C1 |
| ТЕПЛОВОЙ ЛАЗЕРНЫЙ ДВИГАТЕЛЬ В.С.ГРИГОРЧУКА | 1998 |
|
RU2132473C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЦЕНТРИРОВАНИЯ ПРИЦЕЛЬНОГО УСТРОЙСТВА И ПОВОРОТНОГО ЭЛЕМЕНТА | 2002 |
|
RU2234040C2 |

Изобретение относится к устройствам для дистанционного управления планировщиками полей, строительными и землеройными машинами, дреноукладчиками. Целью изобретения является расширение зоны управления, повышение точности устройства и возможность управления движением машин по заданной прямой. Устройство содержит общий корпус 1, дополнительный корпус 2, прожектор 3, карданный механизм 4 подвеса дополнительного корпуса 2, плоское зеркало 5 с регулирующим винтом 6, призму-куб 7 с осью вращения 10, круглый уровень 8, цилиндрический элемент 9 на окне, двигатель поворота 12, связанный посредством зубчатой передачи с осью вращения 10 призмы-куба 7, масляный демпфер 14, балансировочные грузики 16, фиксатор положения 17 призмы-куба 7. 2 з.п.ф-лы, 2 ил.
/5
Фа.2
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ЗЕМЛЕРОЙНЫХ МАШИН | 0 |
|
SU201936A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Шланговое соединение | 0 |
|
SU88A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
