31513
Изобретение относится к преобразовательной технике и может найти применение в импульсно-модулирован- ных инверторах с синусоидальным вы- ходным напряжением.
Целью изобретения явдяется уменьшение массогабаритных показателей устройства и упрощение наладки.
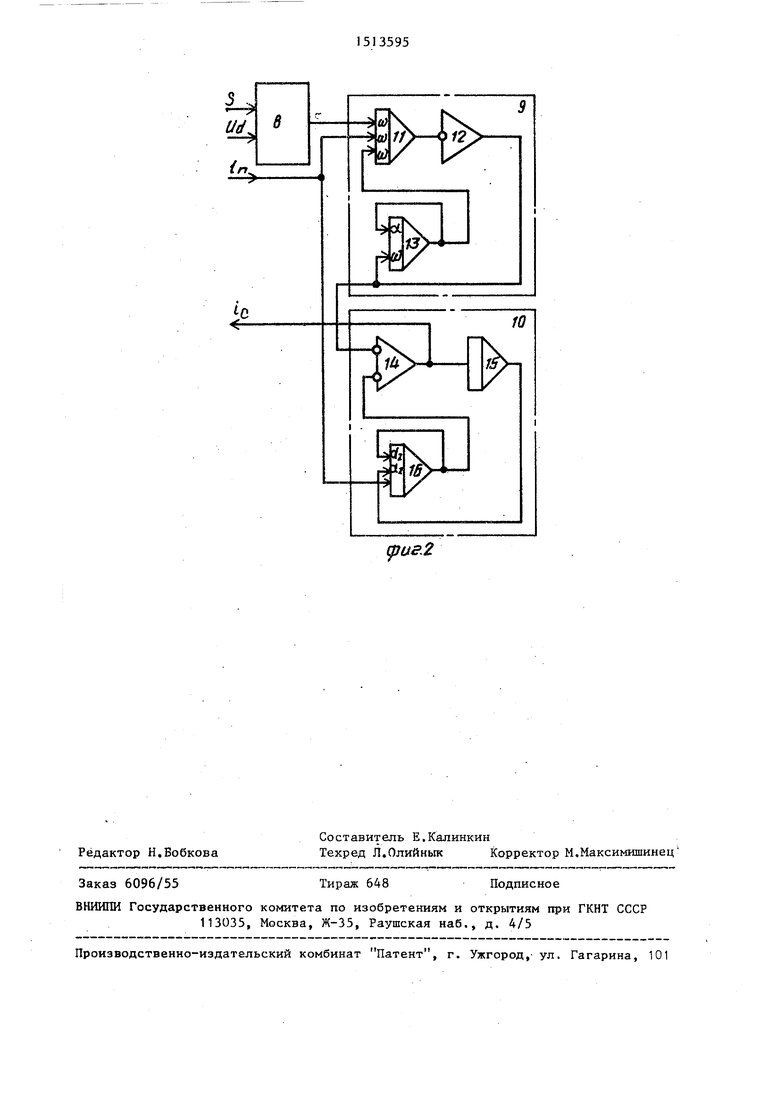
На фиг.1 показаны силовая схема инвертора с йагрузкой и схема устройства управления, с датчиками входного напряжения, выходного напряжения, с блоком модуляции и с иэмери тельным преобразователем; на фиг.2 функциональная схема измерительного преобразователя, выполненного с использованием принципа предварительного синтезирования зубцевидной составляющей тока i(, и отслеживания его гладкой составляющей.
Устройство для управления преобразователями 1 с широтно-импульсной модуляцией и с выходным фильтром 2 содержит первьй датчик 3 входного напряжения, в качестве которого может служить резистивный делитель, второй датчик 4 выходного напряжения в качестве которого может служить трансформатор напряжения, блок 5 управления, в состав которого входят интегрирующий модулятор 6, измерительный преобразователь 7, причем по следний подключен входами к датчикам 3 и 4 к интегрирующему модуля- тору 6, который может быть реализован по любому известному методу, а выходом подключен к соответствующему входу модулятора 6.
Измерительный преобразователь 7 содержит коммутатор 8, информационный вход которого является выходом датчика 3, вход управления - выходом модулятора.6, колебательньй контур 9 и 10. Колебательньй контур 9 содер жит интегратор 11, первый вход которого является выходом коммутатора 8, второй вход - выходом датчика 4, инвертора 12, входом второго являет™ ся выход- интегратора П, апериодическое звено 13, первьй вход которого является его же выходом, второй вход - выходом инвертора 12, кроме того, его выход соединен с третьим входом интегратора 11, второй колеба тельный контур 10, содержащий инвертирующий сумматор 14, первым входом которого является вьщод инвертора 12 колебательного контура 9, интегра
0 5
0 5 з
0
тор 15, вход которого является ныхог: дом инвертирующего сумматора 14 и одновременно выходом измерительного преобразователя 7, апериодическое звено 16 первый вход которого является его же выходом, второй вход - выходом .интегратора 15, третий вход - выходом датчика 4.
Устройство для управления работает следующим образом.
На выходах датчиков 3 и 4 формируются сигналы, пропорциональные мгновенным значениям входного и выходного напряжений инвертора. Эти сигналы поступают в модулятор 6 и измерительный преобразователь 7. Кроме того, с модулятором 6 в измеритель-
кьпй преобразователь 7 поступает сигнал состояния коммутатора. В результате измерительный преобразователь, преобразуя входные сигналы, синтезирует ток емкости выходного фильтра 2. Последний поступает на , соответствующий вход модулятора 6. Последний, используя вьшодные сигналы датчиков 3 и 4 и измерительного преобразователя 7, формирует широт- но-модулированные импульсы, .которые поступают в силовой коммутатор преобразователя 1 .
Измерителыай преобразователь работает следующим образом. I
В коммутаторе 8 поступающий сигнал Uj с выхода датчика 3.модулируется сигналом состояния S, поступаю- пщм с модулятора 6. В результате на выходе коммутатора 8 формируются широтно -модулированные импульсы, амплитудой равные значению и модулированные согласно изменению сигнала Sj, которые поступают в колебательный контур 9 на вход интегратора 11. Туда же поступает сигнал выходного напряжения с датчика 4 и сигнал с апериодического звена 13. Последний предотвращает насьш ;ение интегратора П, На выходе последнего формируется проинтегрированное значение суммы трех сигналов, которое представляет зубцевидную составляющую тока емкости выходного фильтра 2, Выходной сигнал интегратора П через инвертор 12 поступает на второй колебательньй контур Ю, ра вход сумматора 14. Туда же поступает гладкая составляющая тока if, с выхода апериодического звена 16, которое является регулятором
сведения к малой величине разности измеренного значения .е.
Параметры измерительного преобра зователя выбираются следукяцим образом. Скорость интегрирования интеграторов 11 и 15 устанавливается рав ной резонансной частоте СО силового фильтра 2. Скорость интегрирования апериодического звена также устанавливается равной оа, а его статически коэффициент усиления СО устанавливается близким к единице. Скорость интегрирования апериодического звена 16 должна быть такой, чтобы отслеживать частоты близкие к СО , Отслеживание частоты несущей или ее гармоник не требуются, так как высокочастотная зубцевидная сос тавляющая тока синтезирована уже в контуре 9. В силу этого достаточно взять скорость интегрирования между резонансной и несущей частотами:
(ОЭ-ь),
где р) скорость интегрирования - апериодического звена 16;
СО резонансная частота выходного фильтра 2; - частота широтно-модул ированных импульсов.
Статически коэффициент усиления (,) апериодического звена 16 выбирается так, чтобы обеспечить переходной процесс второго контура, близкий к переходному процессу выход- глпш фильтра.
Возможность ограничиться сравнительно низкочастотной следящей системой за -счет предварительного синтезирования высокочастотной зубцевид- ной составляющей тока позволяет получить в предлагаемом устройстве достаточное сочетание точности и помехоустойчивости. Кроме того, устройство для управления по сравнению с известным не требует излишних затрат, связанных с третьим датчиком тока. Устройство для управления упрощает конструкцию самого преобразователя и облегчает его наладку..
5135956
Формула изобретения
Устройство для управления преобразователем с широтно-импульсной моду- ляцией, содержащее блок модуляции, измерительный преобразователь TOKat связанный с первым входом интегрирующего модулятора, а также датчики
1Q входного и выходного напряжения
преобразователя, выходами подключенные к второму и третьему входам интегрирующего модулятора, о т л и - чающееся тем, что, с целью
15 уменьшения массогабаритных показателей и упрощения наладки, измеритель- нъй преобразователь тока выполнен в виде комм у татора, информационный вход которого связан с выходом датчи20 ка входного напряжения, а управляющий вход с выходом датчика выходного напряжения, и двух колебательных контуров, причем первый из них содержит последовательно соединенные ин25 тегратор первым управляющим входом подключенный к выходу коммутатора, и инвертор, апериодическое звено, первый управляющий вход которого замкнут на его выход, соединенный с вто30 рым управляющим входом интегратора, а второй управляющий вход апериодического звена подключен к выходу инвертора, второй колебательный контур содержит последовательно соединенные инвертирующий сумматор, первым входом соединенный с выходом инвертора первого колебательного контура, тегратор и апериодическое звено, первый управляющий вход которого замдд кнут на его выход, соединенный с вторым входом инвертирующего сумматора, второй вход апериодического звена подключен к выходу интегратора, а его третий управляюпшй вход ... соединен с третьим управляющим вхо4Ь
ДОМ интегратора первого колебательного контура и выходом датчика выходного напряжения преобразователя, а выход инвертирующего сумматора
50
подключен к первому входу интегрирующего модулятора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для вычисления синуса и косинуса суммы двух углов | 1980 |
|
SU922788A1 |
| Универсальный время-импульсный интегрирующий преобразователь напряжения | 2023 |
|
RU2815437C1 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ НАПРЯЖЕНИЯ | 2016 |
|
RU2621071C1 |
| Универсальный время-импульсный интегрирующий преобразователь напряжения с четырьмя функциями широтно-импульсной модуляции | 2023 |
|
RU2822374C1 |
| Время-импульсный универсальный интегрирующий преобразователь напряжения с функцией широтно-импульсной модуляции | 2020 |
|
RU2731601C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЭЛЕКТРОМАГНИТНОГО МОМЕНТА АСИНХРОННОГО ДВИГАТЕЛЯ | 1991 |
|
RU2039955C1 |
| Регулятор мощности | 1986 |
|
SU1411109A1 |
| Аналого-цифровой преобразователь | 2021 |
|
RU2760906C1 |
| Универсальный время-импульсный интегрирующий преобразователь напряжения с функцией широтно-импульсной модуляции | 2023 |
|
RU2819373C1 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ НАПРЯЖЕНИЯ | 2003 |
|
RU2239225C2 |
Изобретение относится к преобразовательной технике и может найти применение в импульсно-модулированных инверторах с синусоидальным выходным напряжением. Целью изобретения является уменьшение массо-габаритных показателей устройства и упрощение его насадки. Устройство для управления преобразователем 1 с выходным фильтром 2 содержит первый датчик 3 входного напряжения, второй датчик 4 выходного напряжения, систему 5 управления, в состав которой входят блок 6 модуляции. Измерительный преобразователь 7 подключен входами к датчикам 3,4, к блоку 6, а выходом - к управляющему входу блока 6. На выходе датчиков 3,4, формируются сигналы, пропорциональные мгновенным значениям входного и выходного напряжений аквертора. Эти сигналы поступают в блок 6 и измерительный преобразователь 7. Кроме того, с блока 6 в измерительный преобразователь 7 поступает сигнал состояния коммутатора. В результате измерительный преобразователь, преобразуя входные сигналы, синтезирует ток емкости выходного фильтра 2. Последний поступает на соответствующий вход блока 6 модуляции, который, используя сигналы датчиков 3,4 и измерительного преобразователя 7, формирует широтно-модулированные импульсы, которые поступают в силовой коммутатор преобразователя. 2 ил.
Редактор Н.Бобкова
Составитель Е.Калинкин
Техред Л.Олийнык Корректор М.Максимишинец
Заказ 6096/55
Тираж 648
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-издательский комбинат Патент, г. Ужгород, ул. Гагарина, 101
gjaff2
Подписное
| Калашников Б.Е | |||
| и др | |||
| Системы управления автономными инверторами.- М.: Энергия, 1979 | |||
| Патент США № 3636430, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
