Изобретение относится к области электротехники, в частности к преобразовательной технике, и может быть использовано для управления импульсными стабилизаторами напряжения (ИСН) в автономных системах электропитания (СЭП) с первичными источниками (ПИ) энергии ограниченной мощности, обладающими свойствами источника тока и допускающими работу в режиме короткого замыкания, например полупроводниковыми фотопреобразователями.
Известен [1] способ управления ИСН с силовой цепью понижающего типа (ИСН ПН), выполненной в виде управляемого электрического ключа (УЭК) и DLC-фильтра (индуктивно-емкостного фильтра с замыкающим диодом), соединенных последовательно между входом и выходом ИСН, заключающийся в том, что измеряют ток IC конденсатора DLC-фильтра и напряжение UВЫХ на выходе ИСН, вычисляют напряжение UC.H на емкости конденсатора DLC-фильтра путем интегрирования сигнала, полученного суммированием тока конденсатора, взятого с коэффициентом 1/С, где С - емкость конденсатора DLC-фильтра, и сигнала отклонения напряжения UC.H от UВЫХ, взятого с коэффициентом  где RC – внутреннее активное сопротивление конденсатора DLC - фильтра, формируют сигнал рассогласования ε по напряжению путем сравнения напряжения UC.H с эталонным напряжением UЭТ, умножают ток IC и сигнал рассогласования ε на коэффициенты КI1 и KU1, соответственно, причем
где RC – внутреннее активное сопротивление конденсатора DLC - фильтра, формируют сигнал рассогласования ε по напряжению путем сравнения напряжения UC.H с эталонным напряжением UЭТ, умножают ток IC и сигнал рассогласования ε на коэффициенты КI1 и KU1, соответственно, причем

где L - индуктивность DLC-фильтра, UBX - напряжение на входе ИСН, tИ - статическая длительность импульса управления УЭК, Т - период преобразования и ν Л - скорость изменения пилообразного напряжения широтно-импульсного модулятора (ШИМ); формируют сигнал управления, суммируя сигналы, полученные в результате умножения, и сигналом управления формируют импульсы управления УЭК по принципу ШИМ с блокировкой модулятора в момент формирования модулируемого фронта импульса.
Этот способ обеспечивает ИСН с силовой цепью понижающего типа (ИСН ПН), малую длительность переходных процессов при воздействиях по выходу (изменение тока IH нагрузки) и по входу (изменение напряжения UВХ на входе ИСН).
К недостаткам этого способа относится то, что он не обеспечивает высокой статической точности стабилизации напряжения UВЫХ, поскольку сигнал рассогласования ε по напряжению умножается на коэффициент kU1, величина которого, определяемая через параметры ИСН, относительно мала и не может быть увеличена без ухудшения динамических характеристик ИСН. Кроме того, этот способ не применим для управления ИСН с силовой цепью повышающего типа и в случае использования для питания ИСН первичного источника (ПИ), обладающего свойствами источника тока и допускающего работу в режиме короткого замыкания.
Известен [2] способ управления ИСН шунтового типа (ИСН ШТ) в автономной СЭП, состоящей из соединенных последовательно ПИ ограниченной мощности, допускающего работу в режиме короткого замыкания и ИСН ШТ, силовая цепь которого содержит конденсатор, управляемый электрический ключ и диод, причем диод включен между входом и выходом ИСН ШТ, управляемый электрический ключ включен между входом и общим проводом ИСН ШТ, а конденсатор подключен между выходом и общим проводом ИСН ШТ, являющимся одновременно и общим проводом ПИ. Способ заключается в измерении напряжения на выходе стабилизатора, формировании сигнала рассогласования по напряжению путем вычитания опорного напряжения из напряжения на выходе стабилизатора, усилении сигнала рассогласования по напряжению и формировании усиленным сигналом рассогласования по напряжению импульсов управления УЭК по принципу широтно-импульсной модуляции.
Этот способ позволяет обеспечить стабилизацию напряжения на выходе стабилизатора с силовой цепью ИСН ШТ при использовании ПИ, обладающего свойствами источника тока.
К недостаткам этого способа следует отнести то, что он не обеспечивает астатизма выходного напряжения, поскольку отсутствует интегрирование сигнала рассогласования по напряжению, а в динамических режимах не обеспечивается малая длительность переходных процессов при изменении тока нагрузки из-за невозможности обеспечения оптимальной частотной коррекции сигнала обратной связи в рамках указанного способа управления. Невозможность оптимальной частотной коррекции объясняется тем, что сигнал обратной связи является отклонением выходного напряжения ИСН от эталонного, а величина отклонения выходного напряжения ИСН зависит от параметров конденсатора выходного фильтра, таких как емкость С и внутреннее активное сопротивление RC. Поскольку емкость С и внутреннее активное сопротивление RC зависят от температуры, частоты тока и срока эксплуатации конденсатора, то в рамках указанного способа невозможно обеспечить оптимальную частотную коррекцию сигнала обратной связи.
В качестве прототипа выбран способ управления ИСН ПН [3], согласно которому измеряют ток IС(t) конденсатора DLC-фильтра и напряжение UВЫХ на выходе стабилизатора, получают сигнал рассогласования по напряжению ε (t), вычитая эталонное напряжение UЭТ из UВЫХ(t), получают первый сигнал, умножая сигнал рассогласования по напряжению ε (t) на коэффициент КP, интегрируют второй сигнал, при этом ограничивая путем прерывания интегрирования диапазон изменения интеграла по значениям его максимальных отклонений в динамических режимах, не приводящих к прерыванию модуляции, получают третий сигнал, умножая значение тока IC конденсатора на коэффициент КI, формируют результирующий сигнал, суммируя пятый сигнал и интеграла второго сигнала, сигналом управления формируют импульсы управления управляемым электрическим ключом по принципу широтно-импульсной модуляции с блокировкой модулятора в момент формирования модулируемого фронта импульса.
Этот способ позволяет обеспечить ИСН ПН малую длительность переходных процессов в динамических режимах работы и малую величину статической ошибки выходного напряжения.
Однако при его использовании для управления импульсным стабилизатором напряжения с силовой цепью повышающего типа (ИСН ПВ), выполненным в виде дросселя с индуктивностью L и диода, включенных последовательно между входом и выходом стабилизатора, управляемого электрического ключа, включенного между общим проводом стабилизатора и точкой соединения дросселя и диода, конденсатора с емкостью С, включенного между выходом и общим проводом, и подключенным к первичному источнику, обладающему свойствами источника тока, не достигается малая длительность переходных процессов в динамических режимах работы из-за различия силовых цепей ИСН и свойств первичных источников (ПИ) энергии, т.к. в прототипе первичный источник обладает свойствами источника ЭДС, а в заявляемом решении - свойствами источника тока.
В известных ИСН ПВ, как правило, решают задачи уменьшения величины статической ошибки выходного напряжения или длительности переходных процессов. Однако существуют области техники, в которых от ИСН ПВ требуются как малая длительность переходных процессов, так и малая статическая ошибка выходного напряжения. Например, такие требования к ИСН ПВ предъявляются при их использовании в системах электропитания космических аппаратов. Обеспечить в ИСН малую длительность переходных процессов и малую статическую ошибку выходного напряжения достаточно сложно, так как увеличение коэффициента усиления сигнала рассогласования по напряжению или интегрирование этого сигнала позволяет уменьшить статическую ошибку выходного напряжения, но, как правило, приводит к увеличению длительности переходных процессов в динамических режимах работы ИСН. В известном решении [3] обеспечивается как малая длительность переходных процессов, так и малая статическая ошибка выходного напряжения. Однако это решение применимо к ИСН ПН и при его использовании в ИСН с силовой цепью повышающего типа и подключенного к ПИ, обладающему свойствами источника тока, не обеспечивает малой длительности переходных процессов из-за различия силовых цепей ИСН.
В основу изобретения положена задача повышения качества напряжения на выходе импульсного стабилизатора напряжения с силовой цепью ИСН ПВ при питании его от ПИ, обладающего свойствами источника тока, например при использовании участка вольт-амперной характеристики (ВАХ) солнечной батареи от точки короткого замыкания до точки, в которой ее мощность максимальна. При этом под повышением качества выходного напряжения в динамических режимах понимается уменьшение длительности переходных процессов, а в статических режимах - достижение астатизма выходного напряжения.
Поставленная задача решается тем, что в способе управления импульсным стабилизатором напряжения, выполненном в виде дросселя с индуктивностью L и диода, включенных последовательно между входом и выходом стабилизатора, управляемого электрического ключа, включенного между общим проводом стабилизатора и точкой соединения дросселя и диода, конденсатора с емкостью С, включенного между выходом и общим проводом стабилизатора, и подключен к первичному источнику, обладающему свойствами источника тока, при котором измеряют напряжение UВЫХ на выходе стабилизатора и ток IС конденсатора, формируют сигнал рассогласования по напряжению, вычитая эталонное напряжение из напряжения на выходе стабилизатора, получают первый сигнал, умножая сигнал рассогласования по напряжению на коэффициент КP, интегрируют второй сигнал, при этом ограничивая путем прерывания интегрирования диапазон изменения интеграла по значениям его максимальных отклонений в динамических режимах, не приводящих к прерыванию модуляции, получают третий сигнал, умножая значение тока IC конденсатора на коэффициент КI, формируют результирующий сигнал, суммируя пятый сигнал и интеграла второго сигнала, сигналом управления формируют импульсы управления управляемым электрическим ключом по принципу широтно-импульсной модуляции с блокировкой модулятора в момент формирования модулируемого фронта импульса, согласно изобретению получают пятый сигнал, интегрируя четвертый сигнал, вычисляемый путем вычитания из третьего сигнала самого пятого сигнала, взятого с коэффициентом  где Т – период преобразования, второй сигнал принимают равным первому, причем в случае модуляции переднего фронта импульсов управления управляемым электрическим ключом сигнал управления получают, инвертируя результирующий сигнал, а в случае модуляции заднего фронта импульсов управления управляемым электрическим ключом сигнал управления принимают равным результирующему сигналу, при этом
где Т – период преобразования, второй сигнал принимают равным первому, причем в случае модуляции переднего фронта импульсов управления управляемым электрическим ключом сигнал управления получают, инвертируя результирующий сигнал, а в случае модуляции заднего фронта импульсов управления управляемым электрическим ключом сигнал управления принимают равным результирующему сигналу, при этом

где UЛ(T) - амплитудное значение нелинейного опорного напряжения модулятора, IПИ - величина тока первичного источника,
где RС - внутреннее активное сопротивление конденсатора,
а нелинейное опорное напряжение модулятора
где mТ<tK≤(m+1)T.
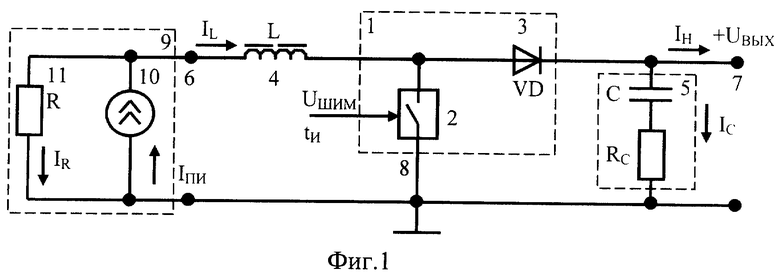
На фиг.1 приведена силовая цепь ИСН ПВ с подключенным к ней ПИ, обладающим свойствами источника тока. На фиг.2 приведены временные диаграммы напряжений и токов элементов силовой цепи ИСН ПВ при питании его от ПИ, обладающего свойствами источника тока. На фиг.3 и 4 приведены амплитудно-импульсные модели силовой части ИСН ПВ и ИСН ПВ, соответственно. На фиг.5 приведена структурная схема ИСН ПВ С ШИМ. На фиг.6 приведены входной и опорный сигналы широтно-импульсного модулятора. На фиг.7 и фиг.8 приведены структурные схемы устройств управления, необходимые для доказательства возможности осуществления изобретения. На фиг.9 приведена функциональная схема ИСН ПВ, в котором реализован заявляемый способ. На фиг.10 и фиг.11 приведены временные диаграммы выходного напряжения, тока дросселя и тока нагрузки ИСН ПВ, подтверждающие решение поставленной задачи.
Силовая цепь ИСН ПВ (фиг.1) содержит регулирующий элемент (РЭ) 1, состоящий из УЭК 2 и диода 3, дроссель 4, конденсатор 5, вход 6, выход 7, общий провод 8. К силовой цепи ИСН ПВ подключен ПИ 9, являющийся источником тока с величиной тока IПИ.
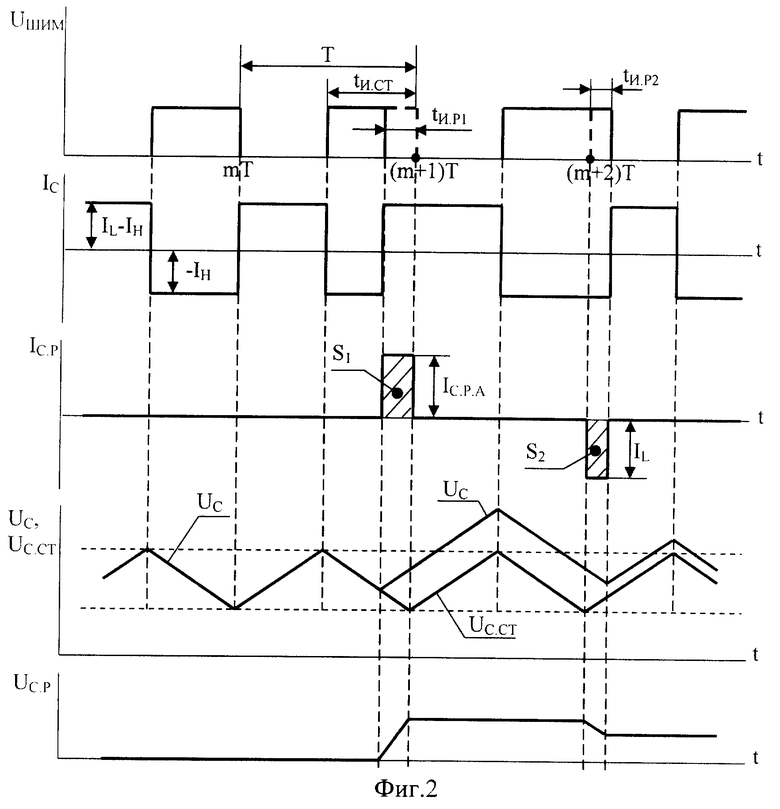
Для доказательства решения поставленной выше задачи посредством предлагаемого способа управления, в частности обеспечения высокого качества выходного напряжения ИСН ПВ в динамических режимах работы, воспользуемся подходом [4], основанным на представлении ИСН с ШИМ в режиме “малого сигнала” адекватной амплитудно-импульсной моделью и применении для синтеза закона управления третьего полиномиального уравнения [5], позволяющего достичь грубости и осуществимости системы с минимальной конечной длительностью переходного процесса в условиях вариации параметров силовой цепи. Для чего из общего процесса в ИСН с ШИМ вычленяют стационарный процесс, соответствующий неизменной (стационарной) длительности tИ.СТ импульсов управления УЭК и процесс регулирования, обусловленный приращением длительности tИ импульса управления на величину tИ.Р относительно стационарной длительности tИ.СТ. Применительно к процессу регулирования для режима “малого сигнала”, когда

где Т - период преобразования, ИСН с ШИМ заменятся моделью с амплитудно-импульсной модуляцией (АИМ), в которой импульсы тока с амплитудой IС.Р.А(t) и длительностью tИ.Р, воздействующие со стороны регулирующего элемента на конденсатор 5, заменяются эквивалентными по ампер-секундной “площади” δ -функциями. Процесс изменения тока IC(t) и напряжения UC(t) на емкости конденсатора 5 с разделением на регулируемую (помечена индексом “Р”) и стационарную (помечена индексом “СТ”) составляющие, показан на временных диаграммах (фиг.2). При этом в качестве нагрузки ИСН принят источник тока с величиной тока IH, а ток IR через резистор 11 в диапазоне рабочих напряжений ПИ 9 (фиг.1) принят из условия
IR<<IПИ,
где IПИ - ток ПИ 9, что позволяет считать

где il - ток дросселя 4.
Регулируемая составляющая тока IС.Р(t), воздействующая на конденсатор 5 выходного фильтра, имеет вид двухполярных импульсов с амплитудой IC.P.A(t) и длительностью tИ.Р (фиг.2). Амплитуда IС.Р.А определяется как разность токов IC.1(t)=IL-IH(t) и IC.2(t)=-IH(t) конденсатора 5 на интервалах разомкнутого и замкнутого состояния УЭК 2, соответственно. Следовательно

Таким образом, можно считать, что при изменении длительности импульса управления УЭК 2 на величину tИ.Р на конденсатор 5 воздействуют ампер-секундные “площади” SШ=ILtИ.Р. В случае, если выполняется условие (1), можно осуществить замену ампер-секундных “площадей” SШ, у которых модулируется ширина, на δ -функции с ампер-секундной “площадью” SA. Эквивалентность замены предполагает равенство “площадей” SШ и SA.
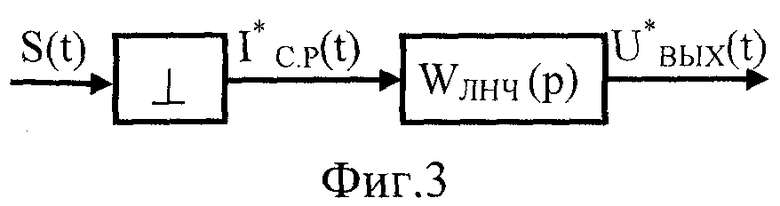
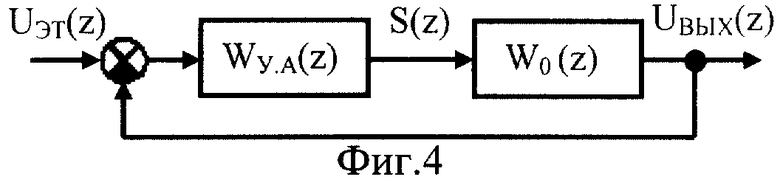
Исходя из вышеизложенного, силовая часть ИСН (фиг.1) может быть представлена амплитудно-импульсной моделью, приведенной на фиг.3, а сама синтезируемая замкнутая система - в виде амплитудно-импульсной модели, приведенной на фиг.4.
В ИСН (фиг.1) линейной непрерывной частью (ЛНЧ) является конденсатор 5. При синтезе закона управления ИСН примем равным нулю внутреннее активное сопротивление RС конденсатора 5. В этом случае передаточная функция ЛНЧ
где С - емкость конденсатора 5.
В Z-преобразованной форме передаточная функция силовой цепи
поскольку учитывает передаточную функцию простейшего импульсного элемента WПЭ(z)=z-1.
Синтез передаточной функции устройства управления WУ.А(z) системы (фиг.4) осуществим с использованием третьего полиномиального уравнения [5]:

где P(z), M(z), Q(z), N(z), G(z) - полиномы, определяющие дискретные передаточные функции
- неизменяемой части (линейной непрерывной части)
WЛНЧ(z)=P(z)/Q(z),
- передаточной функции устройства управления
WУ.А(z)=М(z)/N(z),
- замкнутой импульсной системы
KC(z)=P(z)M(z)G(z).
Поскольку  то степени полиномов числителя и знаменателя передаточной функции WУ.А(z) соответственно равны
то степени полиномов числителя и знаменателя передаточной функции WУ.А(z) соответственно равны
nM=nQ-1=0, nN=nP=0,
а сами полиномы имеют вид
M(z)=a0, N(z)=в0.
Синтезируемая система обладает минимальной конечной длительностью переходных процессов, если

где n=nP+nQ=1 [5].
Подставив полиномы P(z), M(z), Q(z), N(z), G(z) в (6) и решив его, получим передаточную функцию устройства управления
где С - коэффициент, численно равный емкости конденсатора 5. Следовательно, во временной области устройство управления должно иметь коэффициент передачи
При обратном переходе от системы с АИМ к системе с ШИМ необходимо обеспечить равенство коэффициентов передачи
устройств управления систем с АИМ и ШИМ, соответственно. Это необходимо для обеспечения равенства ампер-секундных “площадей” SА и SШ, воздействующих на ЛНЧ в системах с АИМ и ШИМ. Поскольку устройство управления ИСН с ШИМ (фиг.5) содержит широтно-импульсный модулятор с коэффициентом передачи КШИМ и, согласно проведенному выше анализу процессов, источник тока IС.Р.А=IL, коммутируемый к ЛНЧ на время tИ.Р, то коэффициент передачи устройства управления ИСН с ШИМ может быть записан

Подставив (8) и (10) в (9), получим

где КОПТ - искомый коэффициент усиления.
С учетом скорости U'ВХ.М ( ) изменения входного сигнала модулятора в момент времени
) изменения входного сигнала модулятора в момент времени  , непосредственно предшествующий коммутации (формированию модулируемого фронта импульса управления УЭК 2), коэффициент передачи широтно-импульсного модулятора [4]:
, непосредственно предшествующий коммутации (формированию модулируемого фронта импульса управления УЭК 2), коэффициент передачи широтно-импульсного модулятора [4]:
где U

где U ) - скорость изменения напряжения на емкости конденсатора 5 в момент времени
) - скорость изменения напряжения на емкости конденсатора 5 в момент времени  .
.
Рассмотрим случай модуляции переднего фронта импульса управления УЭК. Скорость U ) в момент
) в момент  , предшествующий коммутации
, предшествующий коммутации
Подставив (14) в (13), получим скорость изменения входного сигнала модулятора

В установившемся режиме работы ИСН или в случае малых отклонений
где К3 - коэффициент заполнения импульсов управления УЭК2, а КП=tk/T - относительная длительность проводящего состояния диода 3.
Преобразовав (16), получим
Ток конденсатора 5 на интервале непроводящего состояния УЭК 2 и, соответственно, в момент t

Подставив (18) в (14), получим скорость изменения напряжения на емкости конденсатора
Подставив (19) в (15), а результат в (12), получим
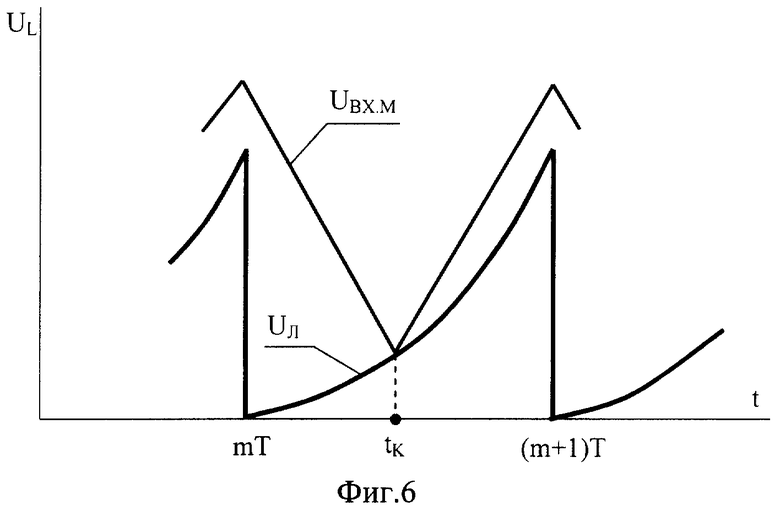
Подставив (20) в (11) и преобразовав, получим скорость изменения опорного сигнала ШИМ на интервале mТ<tK≤(m+1)T
Проинтегрировав левую и правую часть (21), получим закон изменения опорного сигнала ШИМ на интервале mТ<tК≤(m+1)Т (на периоде преобразования)
В случае, если tK=Т:
а КОПТ
В случае модуляции заднего фронта импульса управления У ЭК 2, коэффициент КОПТ передачи сигнала рассогласования и закон формирования входного опорного сигнала ШИМ-UЛ(tK), полученные аналогичным образом, как и в случае модуляции переднего фронта импульса управления УЭК, определяются выражениями (24) и (23). При этом входной сигнал ШИМ дополнительно инвертируют, за счет чего обеспечивают отрицательную обратную связь.
Примерный вид временных диаграмм входного и опорного сигналов широтно-импульсного модулятора приведен на фиг.6.
Сложность технической реализации устройства управления в соответствии с фиг.5 состоит в том, что конденсатор 5, как правило, обладает существенным внутренним активным сопротивлением RC и напряжение UC(t) на емкости конденсатора выходного фильтра, отличается от выходного напряжения UВЫХ(t) на величину падения напряжения URC на внутреннем активном сопротивлении RC конденсатора. Непосредственное измерение UC(t) невозможно. Один из вариантов [1] вычисления UC(t), основанный на применении наблюдателя напряжения на емкости конденсатора, заключается в интегрировании тока IC(t) конденсатора, взятого с коэффициентом 1/С, где С - емкость конденсатора выходного фильтра.
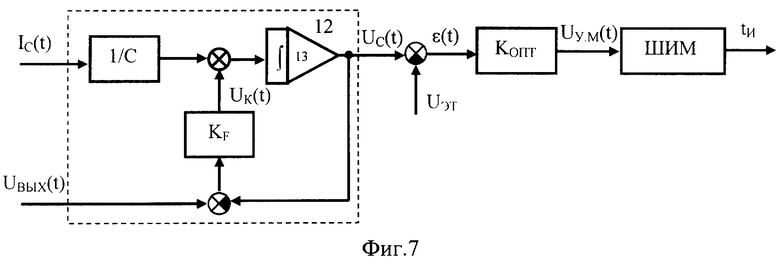
Структурная схема устройства управления с использованием наблюдателя напряжения на емкости конденсатора приведена на фиг.7. Сигнал коррекции UK(t)=К0·(UВЫХ(t)-UC(t)) обеспечивает соответствие среднего значения напряжения UC(t) на выходе интегратора среднему значению выходного напряжения UВЫХ(t), предотвращая возможный дрейф UC(t) из-за неидеальности элементов, на которых реализована схема управления. Величина коэффициента К0 выбирается из условия
Задача по обеспечению высокого качества выходного напряжения в динамических и статистических режимах работы в ИСН ПН решена в [3], где уменьшение статической ошибки стабилизации выходного напряжения ИСН ПН достигается при использовании схемы управления, близкой к приведенной на фиг.7 за счет интегрирования интегратором 13 суммарного сигнала из суммы сигнала, равного току IC(t) конденсатора 5, взятого с коэффициентом 1/С, и сигнала рассогласования по напряжению ε (t)=UВЫХ(t)-UЭТ, взятого с коэффициентом КP. При этом исключается какая-либо коррекция выходного напряжения интегратора 13. Недостаток такого решения заключается в появлении статической ошибки стабилизации выходного напряжения UВЫХ(t), например из-за погрешности датчика тока конденсатора 5.
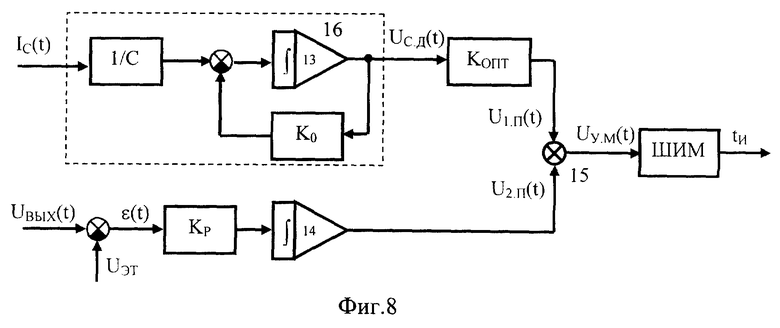
В предлагаемом техническом решении статическая ошибка стабилизации UВЫХ исключается за счет интегрирования тока конденсатора IC(t), взятого с коэффициентом 1/С, и сигнала рассогласования по напряжению ε (t), взятого с коэффициентом КP, по отдельности разными интеграторами. На фиг.8 приведена структурная схема устройства управления ИСН ПВ, полученная из структурной схемы (фиг.7) разделением интегратора 13 на два отдельных интегратора (13) и (14). В ней, кроме интегратора 13, интегрирующего сигнал IC(t), взятый с коэффициентом 1/С, использован второй интегратор 14, интегрирующий сигнал рассогласования ε (t), взятый с коэффициентом КP. Интеграл сигнала рассогласования ε (t), взятый с коэффициентом КP, суммируется посредством сумматора 15 с входным динамическим сигналом модулятора

где UС.Д(t) - динамическая составляющая напряжения на емкости С конденсатора 5, определяемая посредством динамического наблюдателя 16 напряжения на емкости С (фиг.8). За счет интегрирования тока IC(t) конденсатора 5, взятого с коэффициентом 1/С, интеграторами 13 в схеме (фиг.8) обеспечивается равенство динамических (переменных) составляющих напряжений UС.Д(t) и UC(t). Охват интегратора 13 динамического наблюдателя 16 контуром отрицательной обратной (ООС) связи с коэффициентом передачи Ко превращает интегратор 13 в апериодическое звено. При выборе КO<<1/Т, где Т - период преобразования, на временных интервалах в (5-10)Т реакция апериодического звена практически не отличается от реакции интегратора, что позволяет использовать сигнал UС.Д(t) вместо UС(t) для формирования входного сигнала модулятора. Преобразование интегратора 13 в апериодическое звено необходимо для ограничения коэффициента передачи динамического наблюдателя 16 в области низких частот, что исключает “уход” сигнала UС.Д(t) во времени из-за неидеальности элементов, на которых реализуется динамический наблюдатель 16. Отсутствие или наличие постоянной составляющей в сигнале UС.Д(t) не влияет на работу ИСН, поскольку статический режим работы ИСН определяется контуром (ООС), включающим интегратор 14.
Введение контура ООС, включающего интегратор 14, может оказать влияние на работу контура ООС с динамическим наблюдателем 16 и ухудшить динамические характеристики ИСН. Поэтому величина коэффициента КР усиления сигнала рассогласования ε (t) по напряжению определяется из условия малого влияния интеграла сигнала рассогласования ε (t) на результирующий сигнал UУ.М (t), поступающий на вход ШИМ (фиг.8). Условие малого влияния сигнала рассогласования на закон управления, определяющий динамические свойства ИСН, может быть записано в виде

где U1.П(t), U2.П(t) - максимальные отклонения сигналов на входах сумматора 15 (фиг.8).
Рассмотрим случай ступенчатого изменения тока нагрузки IН(t) на величину Δ IН в момент формирования регулируемого фронта импульса управления УЭК. При этом на интервале периода от момента изменения тока нагрузки
Максимальное отклонение сигнала U2.П(t) будет через (6-9)Т после момента ступенчатого изменения тока в момент возврата напряжения UВЫХ к стабильному значению. Однако влияние интеграла сигнала рассогласования на входной сигнал ШИМ в динамических режимах определяется не только амплитудой сигнала U2.П, но и скоростью его изменения U

Из схемы фиг.8 с учетом (27)

Отклонение U2/П через период Т

Подставив (25) и (26) в (24) и преобразовав, получаем
где RС и С - внутреннее активное сопротивление и емкость конденсатора 5 (фиг.1).
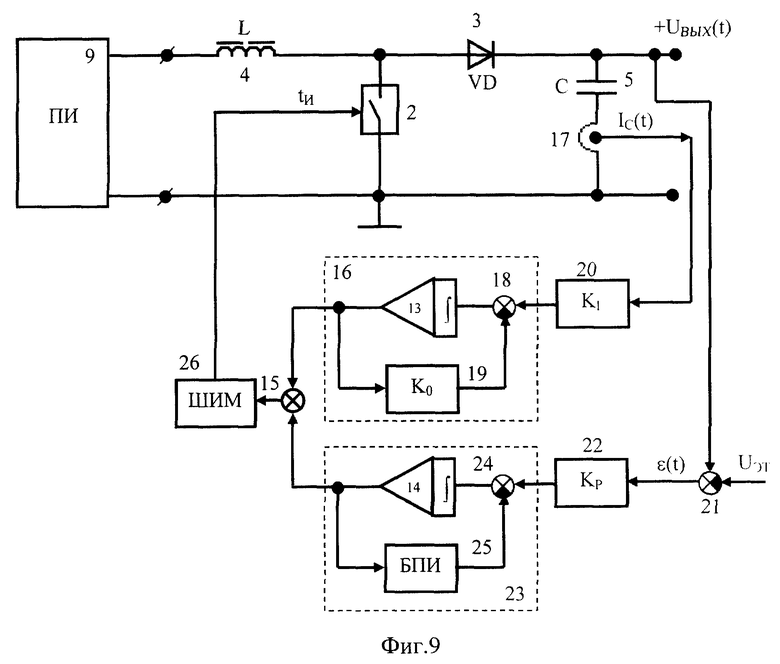
На фиг.9 приведен ИСН ПВ со схемой управления, в которой реализован синтезированный закон управления и использован контур ООС, обеспечивающий астатизм. Кроме рассмотренных ранее элементов, силовая цепь ИСН (фиг.9) содержит датчик 17 тока конденсатора 5. В схеме управления (фиг.9) динамический наблюдатель 16 реализован с использованием интегратора 13, сумматора 18 и блока ООС 19. Блоки (фиг.8) с коэффициентами передачи 1/С и КОПТ объединены в один блок с коэффициентом передачи
и с учетом (2)
Преобразовав (22) и (31) с учетом (32) и (2), получим
где mТ<tK≤(m+1)Т,

Сигнал рассогласования по напряжению ε (t) формируется сумматором 21 и усиливается в КP раз блоком 22. Интегратор 14 преобразован в интегратор 23 с ограниченным диапазоном изменения интеграла сигнала рассогласования по напряжению ε (t). Ограничение диапазона изменения интеграла сигнала рассогласования обеспечивается за счет охвата интегратора 14 контуром ООС посредством сумматора 24 и блока прерывания интегрирования 25.
Необходимость применения интегратора 23 с ограниченным диапазоном изменения интеграла сигнала рассогласования вызвана тем, что при коммутации значительной активной или активно-емкостной нагрузок, приводящих к прерыванию ШИМ, сигнал рассогласования ε (t) имеет большие значения по амплитуде и длительности. При этом к моменту возврата напряжения на выходе ИСН к стабильному значению интеграл сигнала рассогласования по напряжению принимает максимальное значение. Причем возврат интеграла сигнала рассогласования к его значениям до момента коммутации нагрузки и переход ИСН к статическому режиму работы возможен только за счет смены знака отклонения выходного напряжения, т.е. перерегулирования, приводящего к увеличению длительности переходного процесса. Исключить или существенно уменьшить перерегулирование можно за счет прерывания процесса интегрирования в случае выхода интеграла сигнала рассогласования за границы зоны его изменений в динамических режимах работы ИСН, не приводящих к прерыванию модуляции. Поэтому в схеме (фиг.9) для улучшения качества выходного напряжения в динамических режимах работы, связанных со значительными возмущающими воздействиями, приводящими к прерыванию процесса широтно-импульсной модуляции, использован интегратор 23 с ограниченным диапазоном изменения интеграла сигнала рассогласования ε (t). Такой интегратор может быть реализован, например, путем шунтирования стабилитронами конденсатора интегратора 14, выполненного на операционном усилителе.
Широтно-импульсный модулятор 26 формирует сигнал управления УЭК 2 (фиг.2) по принципу ШИМ с блокировкой модулятора в момент образования регулируемого фронта импульса.
Для подтверждения реализуемости предлагаемого способа на основе схемы ИСН ПВ (фиг.9) была разработана математическая модель ИСН ПВ в формате PSpise и изготовлен его макет. Макет ИСН ПВ и его математическая модель имеют следующие параметры: UВЫХ=100 В, IПИ=60 А, RПИ=5-15 Ом, L=500 мкГн, С=5000 мкФ, RС=0.005 Ом, Т=40 мкс. Амплитудное значение UЛ(T) нелинейного опорного напряжения модулятора принято равным 1 В. После чего по (33)-(35) определены КI, UЛ(tK), КP, а КO<<1/Т, где Т - период преобразования. В блоке 23 предусмотрено прерывание процесса интегрирования в случае выхода интеграла сигнала рассогласования за границы зоны его изменений в динамических режимах работы ИСН, не приводящих к прерыванию модуляции.
Проведенные исследования переходных и установившихся процессов в макете ИСН и его математической модели показали работоспособность ИСН с заявленным управлением и решение поставленных задач.
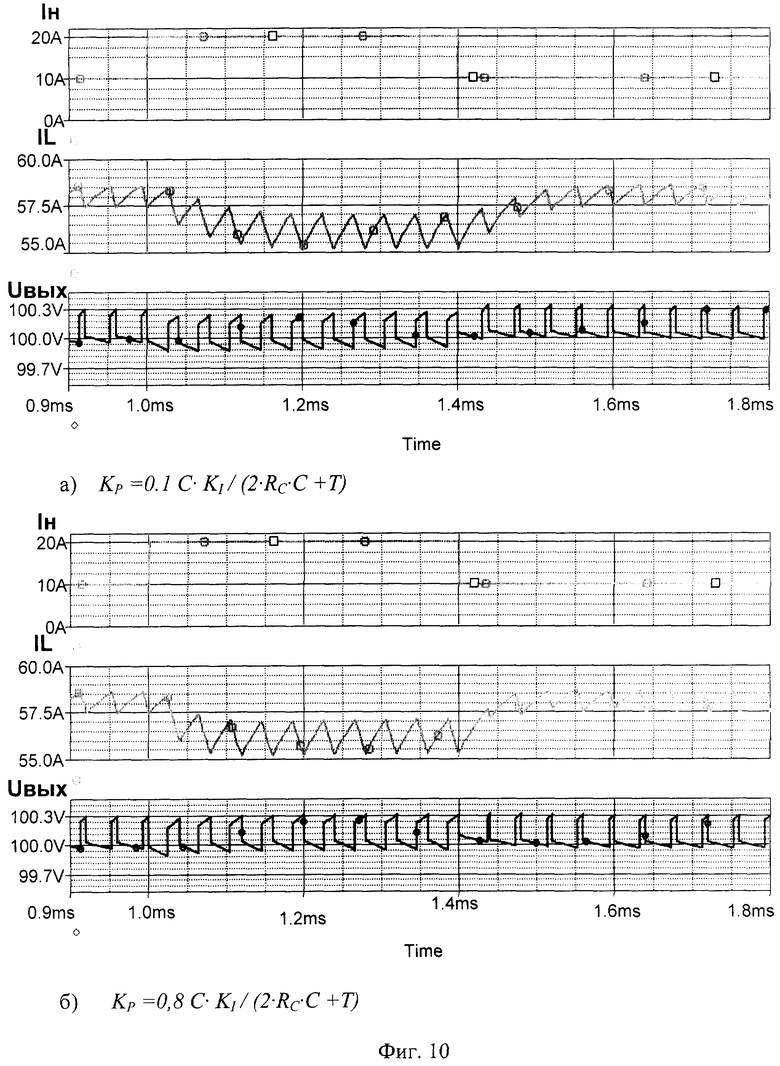
На фиг.10 а,б приведены временные диаграммы токов нагрузки IH и дросселя IL и напряжения UВЫХ на выходе ИСН полученные при использовании математической модели ИСН ПВ. Временные диаграммы получены для двух значений коэффициента КP
КP=0.1 С· КI/(2· RC·C +T),
КP=0.8· С КI/(2· RC·C+T).
Из анализа временных диаграмм видно, что при КP=0.1· С· KI/(2· RC·C+T), (фиг.10а) длительность переходных процессов, вызванных коммутацией активной нагрузки, составляет (2-4)Т, а при КP=0.8· С· КI/(2· RC·C+Т), (фиг.10б) длительность переходных процессов возрастает и появляются колебания коэффициента заполнения импульсов управления относительно их установившегося значения. Это подтверждает необходимость ограничения величины коэффициента КP на уровне, определяемом (35). При вариации параметров ИСН, входящих в выражение (33) с одновременным изменением КP согласно (35), длительность переходных процессов, выраженная в периодах Г, сохраняется.
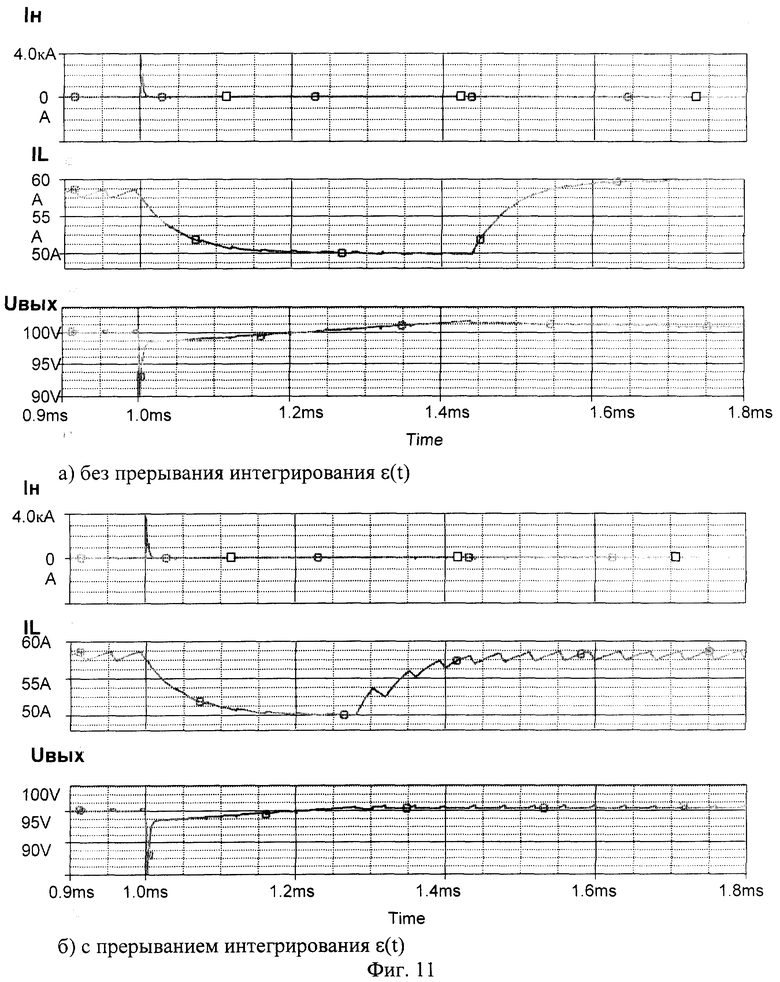
На фиг.11а,б приведены временные диаграммы токов нагрузки IH и дросселя il и напряжения UВЫХ на выходе ИСН, полученные при коммутации активно-емкостной нагрузки при использовании в качестве интегратора 23 интегратора без прерывания процесса интегрирования (фиг.11а) и при использовании в качестве интегратора 23 интегратора с прерыванием процесса интегрирования (фиг.11б). Из сравнения переходных процессов в ИСН ПВ (фиг.11а и 11б) видно, что прерывание процесса интегрирования сигнала рассогласования значительно сокращает время переходных процессов, связанных с прерыванием ШИМ.
При вариации величины тока первичного источника в пределах ±30% относительно величины тока, принятого при расчете КI, характер и длительность переходных процессов практически не изменяется. Поэтому, если при работе первичного источника его ток изменяется не более чем на ±30%, коэффициенты KI и КP могут быть заданы фиксированными. В случае, если ток ПИ изменяется более чем на ±30%, для сохранения качества выходного напряжения необходимо изменять коэффициенты KI и КP в соответствии с изменением тока ПИ.
ЛИТЕРАТУРА
1. А.с. №1403037 СССР, кл. G 05 F 1/56. Способ стабилизации выходного напряжения импульсного стабилизатора / В.И.Иванчура, А.В.Манаков, Ю.В.Краснобаев, Б.П.Соустин. - Опубл. 15.06.88, Бюл. №22.
2. А.с. №1616375 СССР, кл. G 05 F 1/613. Стабилизирующий источник напряжения постоянного тока / А.П.Макаров. - Опубл. 05.01.89.
3. Патент №2025764 РФ, кл. G 05 F 1/56. Способ управления импульсным стабилизатором / В.И.Иванчура, А.В.Манаков, Ю.В.Краснобаев, Б.П.Соустин. - Опубл. 30.12.94, Бюл. №24.
4. Иванчура В.И., Манаков А.В., Соустин Б.П. Синтез исследование быстродействующего ИПН с ШИМ // Техническая электродинамика. - 1987. - c.43-51.
5. Цыпкин Я.З. Теория линейных импульсных систем. - М.: Физматгиз, 1963. - 968 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ | 2002 |
|
RU2238583C2 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ НАПРЯЖЕНИЯ | 2011 |
|
RU2460114C1 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ НАПРЯЖЕНИЯ | 2012 |
|
RU2509337C1 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ НАПРЯЖЕНИЯ | 2016 |
|
RU2621071C1 |
| Способ управления зарядным устройством с импульсным принципом действия | 2023 |
|
RU2813604C1 |
| Способ управления импульсным стабилизатором напряжения | 2021 |
|
RU2764783C1 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ | 1988 |
|
RU2025764C1 |
| Способ стабилизации выходного напряжения импульсного стабилизатора | 1985 |
|
SU1376069A1 |
| Способ стабилизации выходного напряжения импульсного стабилизатора | 1985 |
|
SU1348796A1 |
| Импульсный стабилизатор напряжения | 1985 |
|
SU1372288A1 |

Изобретение относится к преобразовательной технике и может быть использовано для управления импульсными стабилизаторами постоянного напряжения повышающего типа с широтно-импульсной модуляцией, которые подключены к источникам энергии ограниченной мощности, обладающим свойствами источника тока. При этом обеспечиваются малые амплитуда и длительность переходных процессов и астатизм выходного напряжения. Для чего измеряют ток IC конденсатора выходного фильтра и напряжения UВЫХ на выходе стабилизатора. Сигнал рассогласования ε = UВЫХ - UЭТ, где UЭТ -эталонное напряжение, усиливают в КP раз и интегрируют, ограничивая диапазон возможного изменения интеграла (прекращая интегрирование) по значениям его максимальных отклонений в динамических режимах, не приводящих к прерыванию модуляции. Ток конденсатора IC подвергают усилению в K1 раз, подвергают частотной коррекции и в сумме с интегралом сигнала рассогласования подают на вход модулятора. Пилообразное опорное напряжение модулятора формируют в виде квадратичной параболы. 13 ил.
Способ управления импульсным стабилизатором напряжения, выполненным в виде дросселя с индуктивностью L и диода, включенных последовательно между входом и выходом стабилизатора, управляемого электрического ключа, включенного между общим проводом стабилизатора и точкой соединения дросселя и диода, конденсатора с емкостью С, включенного между выходом и общим проводом стабилизатора, и подключенным к первичному источнику, обладающему свойствами источника тока, заключающийся в том, что измеряют напряжение Uвых на выходе стабилизатора и ток IС конденсатора, формируют сигнал рассогласования по напряжению, вычитая эталонное напряжение из напряжения на выходе стабилизатора, получают первый сигнал, умножая сигнал рассогласования по напряжению на коэффициент Кр, интегрируют второй сигнал, при этом ограничивая путем прерывания интегрирования диапазон изменения интеграла по значениям его максимальных отклонений в динамических режимах, не приводящих к прерыванию модуляции, получают третий сигнал, умножая значение тока IС конденсатора на коэффициент K1, формируют результирующий сигнал, суммируя пятый сигнал и интеграл второго сигнала, сигналом управления формируют импульсы управления управляемым электрическим ключом по принципу широтно-импульсной модуляции с блокировкой модулятора в момент формирования модулируемого фронта импульса, отличающийся тем что получают пятый сигнал, интегрируя четвертый сигнал, вычисляемый путем вычитания из третьего сигнала самого пятого сигнала, взятого с коэффициентом К0<<I/Т, где Т - период преобразования, второй сигнал принимают равным первому, причем в случае модуляции переднего фронта импульсов управления сигнал управления получают, инвертируя результирующий сигнал, а в случае модуляции заднего фронта импульсов управления сигнал управления принимают равным результирующему сигналу, при этом K1=2UЛ(T)/(IПИ Т), где UЛ(T) - амплитудное значение нелинейного опорного напряжения модулятора, IПИ - величина тока первичного источника, Кр<<2СК1/(2RСC+Т), где RС - внутреннее активное сопротивление конденсатора, а нелинейное опорное напряжение модулятора UЛ(tК)=K1IПИ t
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ | 1988 |
|
RU2025764C1 |
| ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР С ОГРАНИЧЕНИЯМИ ВЫХОДНЫХ СИГНАЛОВ | 1999 |
|
RU2156992C1 |
| RU 94020934 А1, 10.04.1996 | |||
| Способ управления импульсным стабилизатором постоянного напряжения | 1989 |
|
SU1702349A1 |
| Импульсный понижающий стабилизатор постоянного напряжения | 1990 |
|
SU1786477A1 |
| US 3710229 А, 05.02.1982 | |||
| US 4630187 А, 11.09.1986 | |||
| КАЯК | 2013 |
|
RU2647164C2 |

