1
(21)4374621/24-10
(22)08.02.88
(46) 15.10.89. Бюл. № 38 (72) В.С.Колотыркин
(53)513.1(088.8)
(56)Авторское свидетельство СССР № 1219922, кп. G 01 С 22/00, 1984.
Авторское свидетельство СССР № 581371, кл. G 01 С 17/32, 1975.
(54)ЦИФРОВОЙ КОМПАС
(57)Изобретение относится к навигационному приборостроению и может быть использовано в спорте, медицине, строительстве и других областях техники. Цель изобретения - расширение функциональных возможностей за счет измерения расстояиий и площадей. Компас содержит генератор 1 пилообразного тока, магниточувствительный датчик 2, компараторы 3, 8, II, 16. В состав компаса входят также счетчики 6, 14 импульсов, регистры 7, 15, триттеры 9, 17, 19. Вычислитель 20 осуществляет обработку поступающих данных, результаты поступают на индикатор 21. 2 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОНОМНЫЙ НАВИГАЦИОННЫЙ ПРИБОР | 1994 |
|
RU2098767C1 |
| Электропривод постоянного тока | 1983 |
|
SU1102001A1 |
| Устройство для выделения признаков объекта | 1989 |
|
SU1817115A1 |
| Счетчик реактивной энергии | 1988 |
|
SU1622828A1 |
| Устройство для автоматизированного анализа электрофизиологических сигналов | 1986 |
|
SU1360698A1 |
| Устройство для вывода графической информации на экран электронно-лучевой трубки | 1984 |
|
SU1196843A1 |
| АВТОНОМНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2125237C1 |
| Машина для испытаний образцов на растяжение | 1984 |
|
SU1244542A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ЛАБИЛЬНОСТИ ЗРИТЕЛЬНОЙ СИСТЕМЫ ЧЕЛОВЕКА | 2005 |
|
RU2286082C1 |
| Устройство для измерения нелинейности пилообразного напряжения | 1990 |
|
SU1777101A1 |
Изобретение относится к навигационному приборостроению и может быть использовано в спорте, медицине, строительстве и других областях техники. Цель изобретения - расширение функциональных возможностей за счет измерения расстояний и площадей. Компас содержит генератор 1 пилообразного тока, магниточувствительный датчик 2, компараторы 3, 8, 11, 16. В состав компаса входят также счетчики импульсов 6, 14, регистры 7, 15, триггеры 9, 17, 19. Вычислитель 20 осуществляет обработку поступающих данных, результаты вычислений поступают на индикатор 21. 2 ил.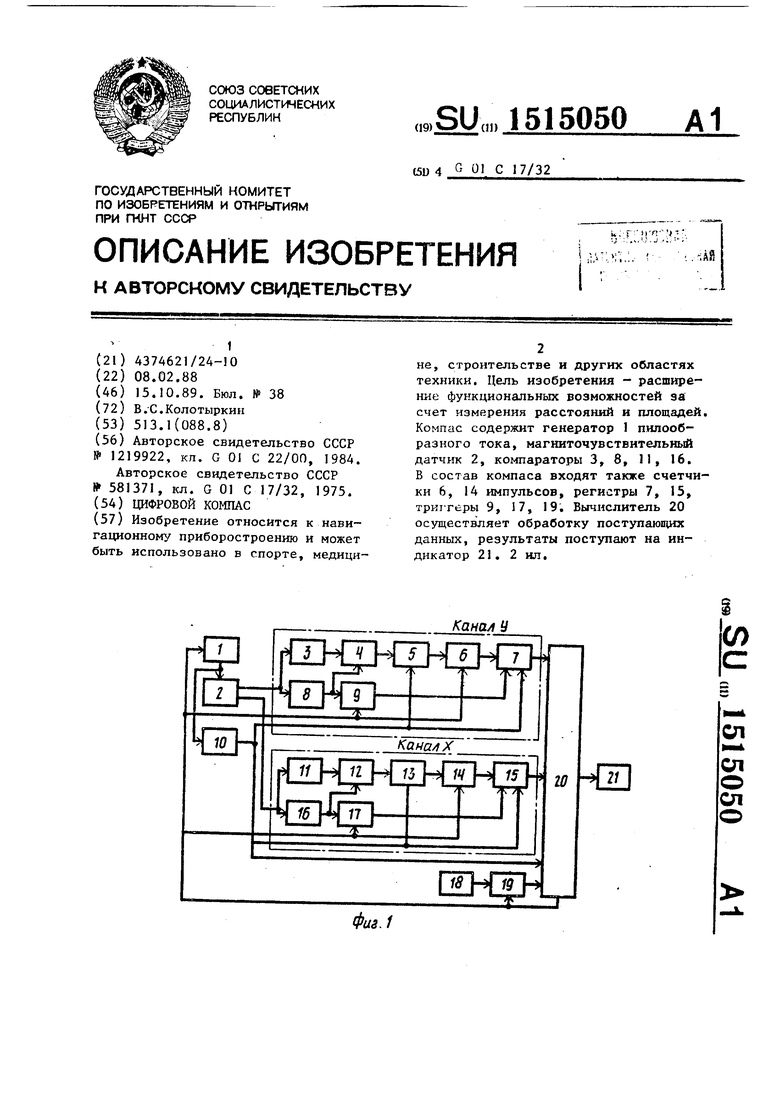
Кана У
(/
ел
СП
О
ел
Изобретение относится к навигационному приборостроению и может быть применено на подвижных объектах, ориентируемых по магнитному полю земли в спорте, медицине, строительстве и других областях техники.
Цель изобретения - расширение функциональных возможностей цифрового компаса за счет одновременного измерения расстояний и площадей.
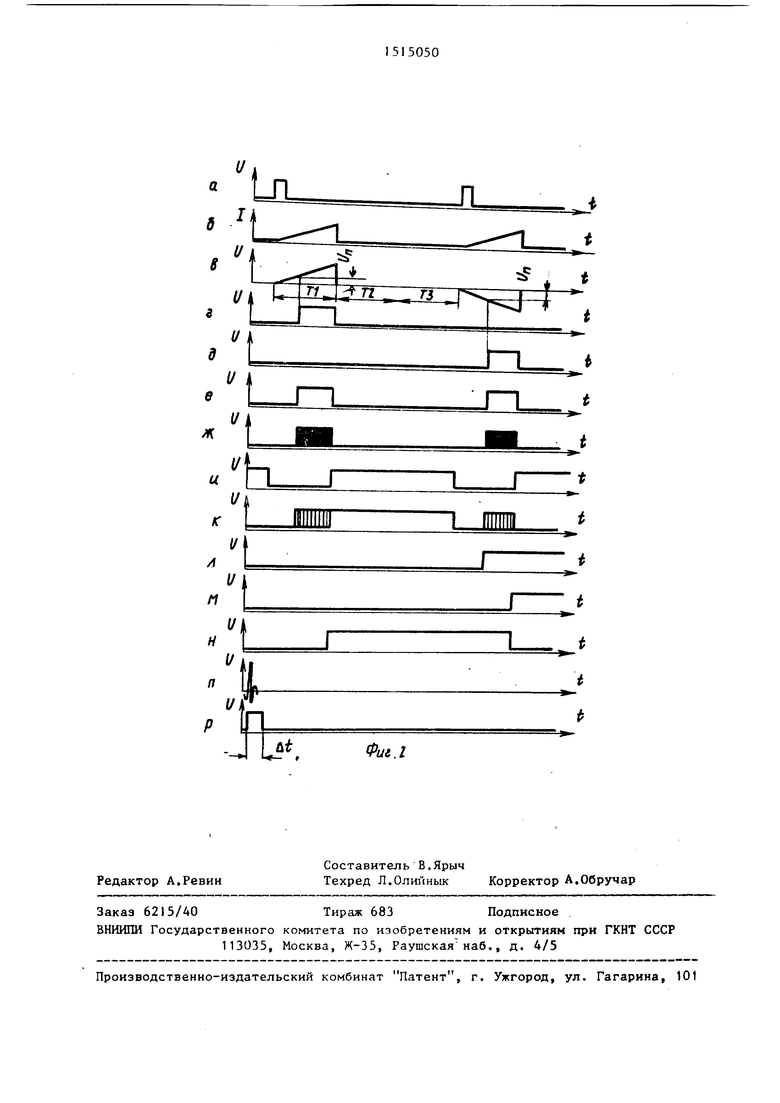
На фиг.1 изображена структурная схема цифрового компаса; на фиг.2 - временнью диаграммы, поясняюише работу цифрового компаса.
Цифровой компас состоит из последовательно соединенных управляемого генератора 1 пилообразного тока, магниточувствительного датчика 2, горизонтально расположенного в кардан- ном подвесе и выполненного в виде двух ортогонально установленных элементов Холла, первого компаратора. 3, первого элемента ИЛИ 4, первого преобразователя 5 фаза-интервал, первого счетчика 6,первого регистра 7, последовательно соединенных второго компаратора 8 и первого триггера 9. Кроме того, цифровой компас содержит формирователь 10 импульсов, по- следовательно соединенные третий компаратор 11, второй элемент РШИ I2, второй преобразователь 13 фаза-интервал, второй счетчик 14, второй гистр 15, последовательно соединенные четвертый компаратор 16 и второй триггер 17, последовательно соединенные датчик 18 пути, третий триггер 19, вычислитель 20 и индикатор 21.
Цифровой компас работает следующим образом.
Разрешающий импульс с вычислителя 20 (фиг.2а) обнуляет все счетчики и триггеры и запускает управляемый ге- иератор 1 пилообразного тока, который возбуждает магниточувствительный датчик 2 (фиг.2б). В зависимости от напряженности и направления магнитного поля выходное напряжение на выхо- де магниточувствительного датчика 2 (фиг.2в) определяется соотношением
R
Еа I.-B,,
(О
EJ - ЭДС Холла, мВ;«
R - постоянная Холла, зависящая от типа полупроводникового материала; I, - управляющий ток,
В - индукция магнитного поля.
h - толщина пластины, мм. Если принять вектор напряженности магнитного поля за единицу, то проекции вектора по -осям координат X и Y будут равны синусу и косинусу угла между вектором напряженности магнитного поля и осью абсцисс декартовой системы координат. Вычисление синуса и косинуса производится по двум иден T fi4HbiM каналам X и Y. Рассмотрим работу канала Y. В зависимости от поляности напряжения с первого выхода магниточувствительного датчика 2 работает или первый (фиг.2г), или второй (фиг.2д) компаратор, с выхода которого перепад напряжения поступает на вход первого элемента ИЛИ 4 (фиг.2е и фиг,2з), фаза перепада на выходе которого определяется моменто совпадения пилообразного напряжения с выхода магниточувствительного датчика 2 (фиг.2в) и опорного напряжения на одном из компараторов 3 или 8 устанавливаемых в процессе настройки Перепад напряжения с выхода первого элемента ИЛИ 4 поступает на первый Еход первого преобразователя 5 фаза-интервал (фиг.1), с выхода которого импульсы поступают на счетный вход первого счетчика 6 (фиг.1). Амплитуда проекции вектора напряженности магнитного поля на ось Y преобразуется в первом преобразователе 5 фаза-интервал (фиг.1) во временной интервал, заполненный счетными импульсами. Начало этого временного интервала определяется моментом совпадения напряжений на одном из компараторов 3 или 8 (), а конец временного интервала определяется передним фронтом импульса формирователя И1-1ПУЛЬСОВ 10.
На выходе первого счетчика 6 образуется цифровой код, численно рав- ньш синусу угла между вектором напряженности магнитного поля и осью ОХ и значению ординаты 4Y.
После окончания пилообразного ;импульса управляемого генератора 1 пилообразного тока запускается формирователь 10 импульсов, передний фронт импульса которого переписьша- ет информацию с первого счетчика 6 в первьш регистр 7. Сюда же в младши разряд записьшается логическая единица с выхода первого триггера 9
5
(фиг.2л), который запускается перепадом с выхода второго компаратора 3 (фиг.2д). Цифровой код числа /3Y с выхода первого регистра 7 считьша- ется вычислителем 20. Аналогично работает и канал X.
Датчик 18 пути формирует после каждого отрезка пути импульс, запус- кающиу третий триггер, 19, логический уровень которого запускает программу вычислителя 20 (фиг.1, фиг.2п и фиг.2р). Через время Л1, определяемо программой, вычислитель 20 с первого выхода выдает импульс, запускающий управляемый генератор 1 пилообразного тока и обнуляющий ьсе счетчики и триггеры. Через время Г, определяемое длительностью пилообразного им
пульса генератора 1 п1.аообразного то- 20торяется,
ка, импульс с вькода формирователя Вычислитель 20 вычисляет спедую10 запускает вычислитель 20 для вы-щне функции:
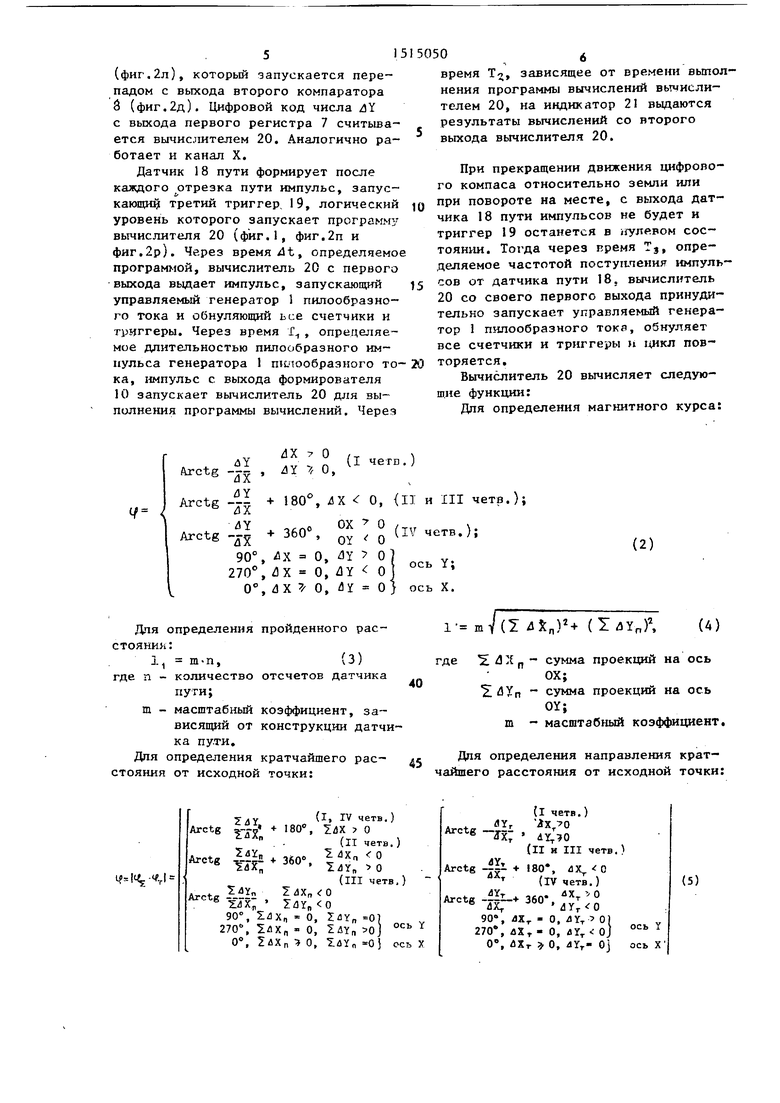
полнения программы вычислений. Через Для определения магнитного курса:
{
, .Y :; ° {I чегв.)
Arctg , 4Y - О,
Arctg 180, Х О, 11 и III четв.);
А
Arctg 360 ° (IV четв.);
90°, ЛХ О, -ЗУ О 270°, 4Х О, dY О
ось Y;
0°, dX / О, Y 0} ось X.
(1 )4 (l4Yj (4) где 4 X р - сумма проекций на ось
40
Дпя определения пройденного расстояния:
1 m-n,(3)
где п - количество отсчетов датчика
пути;
m - масштабный коэффициент, зависящий от конструкции датчика пути.
Для определения кратчайшего рас- /г определения направления крат- стояния от исходной точки:чайшего расстояния от исходной точки:
ОХ; ДУр - сумма проекций на ось
OY; m - масштабный коэффициент.
М | 5;-Ч т1
время То, зависящее от времени вьтол- нения программы вычислений вычислителем 20, на индикатор 21 вьщаются результаты вычислений со второго выхода вычислителя 20.
При прекращении движения цифрового компаса относительно земли или при повороте на месте, с выхода датчика 18 пути импульсов не будет и триггер 19 останется в «гулевом состоянии. Тогда через премя Tj, определяемое частотой поступления импуль- 5 сов от датчика пути 18, вычислитель 20 со своего первого выхода принудительно запускает управляемый генератор 1 пилообразного тока, обнуляет все счетчики и триггеры и пов0
(2)
ось Y;
(1 )4 (l4Yj (4) где 4 X р - сумма проекций на ось
ОХ; ДУр - сумма проекций на ось
OY; m - масштабный коэффициент.
(5)
Для определения площади по замкнутому контуру:
S -11 (14У„ .fY..).4X,,j| . (6
где 24Yp - сумма предыдущих ординат при наличии путевых координат;
- последующая-ордината;
ЛХ f,4i - последующая абсцисса.
Использование цифрового компаса позволяет определять направление движения, кратчайшее и пройденное расстояния от исходной точки и площадь при обходе контуров.
Формула изобретения
Цифровой компас, содержащий магни
точувствительный датчик, формирователь импульсов, последовательно соединенные элемент ИЛИ, преобразователь фаза-интервал, счетчик, о т - личающийся тем, что, с целью расширения функциональных возможностей за счет измерения расстояний и площадей, в него введены управляемый генератор пилообразного тока, четьфе компаратора, два регистра, три триггера, последовательно соединенные второй элемент ИЛИ, второй преобразователь фаза-интервал, второй счетчик, а также датчик пути, вычислитель, индикатор, причем выход генератора пилообразного тока соединен с входами магниточувствительного датчика и формирователя импульсов, выход которого соединен с вторым
0
5
0
5 Q
5
входом первого и второго преобразователей фаза-интервал, с первыми входами вычислителя, первого и второго регистров, выходы которых соединены соответственно с второй и третьей группами входов вычислителя, первый выход которого соединен с входами управляемого генератора пилообра:зного тока, с обнуляющими входами первого и второго счетчиков и с обнуляющими входами первого, второго и третьего триггеров, первый выход магниточувствительного датчика соединен с входом первого и второго компараторов, второй выход магниточувствительного датчика соединен с входами третьего и четвертого компараторов, выход первого компаратора соединен с первым входом первого элемента ИЛИ, выход второго компаратора соединен с вторым входом первого элемента ИЛИ и с входом первого триггера, выход которого соединен с вторьм входом первого регистра, выход третьего компаратора соединен с первым входом второго элемента ИЛИ, выход четвертого компаратора соединен с вторым входом второго элемента ИЛИ и с входом второго триггера, которого соединен с вторым входом второго регистра, выходы первого и второго счетчиков соединены соответственно с третьими входами первого и-второго регистров, датчик пути соединен с входом третьего триггера, выход которого соединен с четвертым входом вычислителя, второй выход которого соединен с входом индикатора.
Фиг. I
