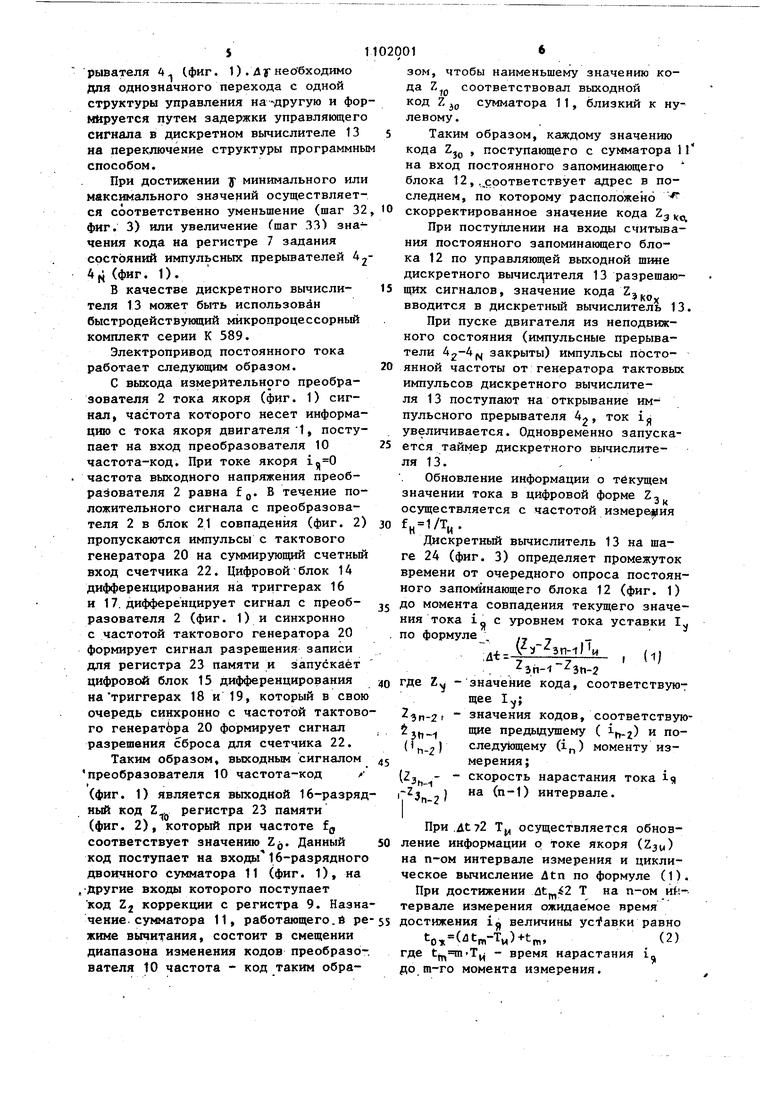
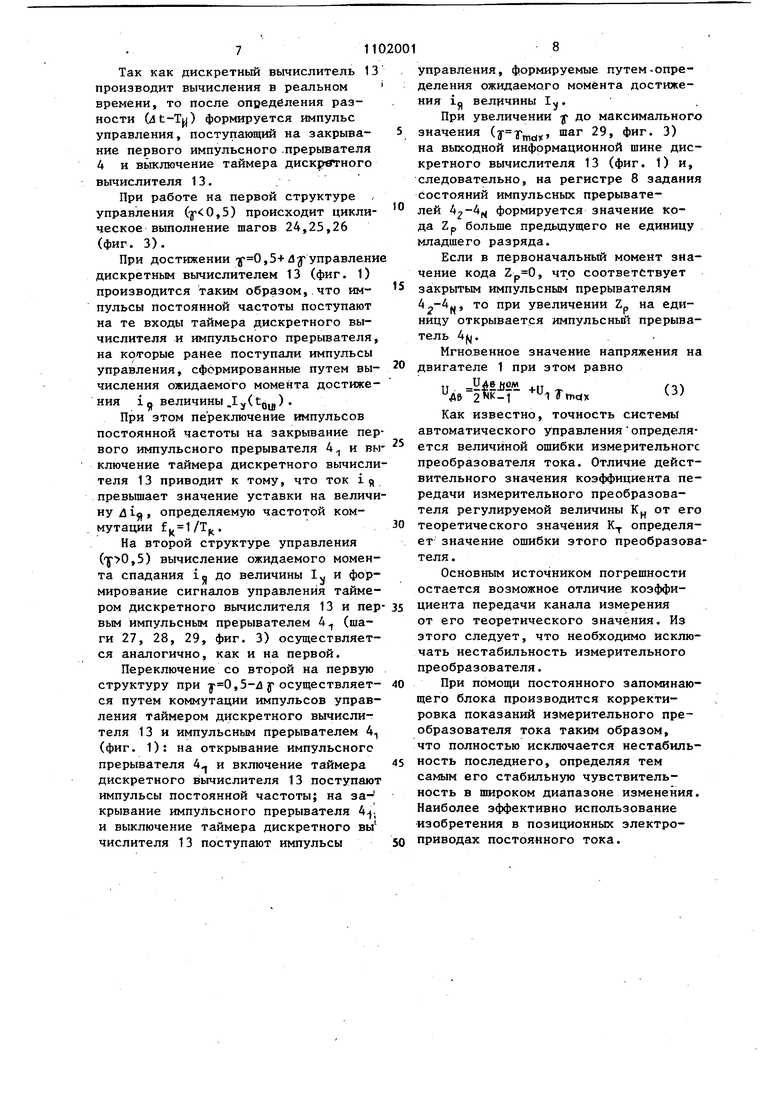
Изобретение относится к электротехнике и может быть использовано для регулирования тока и скорости электродвигателей постоянного тока. .Известен электропривод постоянного тока, содержащий электродвигатель, соединенный с тиристорным пре рывателем, частотный датчик в цепи якоря электродвигателя, подключенный -через последовательно соединенные формирователя пилообразного напряжения, компаратор и триггер к первому входу блока совпадения, при чем вторые входы триггера и блока совпадения объединены между собой и подключены к выходу датчика тока, а выходы компаратора и блока совпадения через дифференцирующие и усилительные блоки соответственно подключены к управляющим электродам в цепи включения и выключения тирис торного прерывателя Г ОЧастотный датчик тока представляет собой магнитно-транзисторный преобразователь, частота выходного сигнала которого изменяется в зависимости От величины протекающего тока. Недостатком этого электропривода является уменьшение точности регули рования тока в широком диапазоне ег изменения вследствие переменной чув ствитёльйости датчика тока., определяемой нелинейной зависимостью част ты выходного сигнала датчика от зна чений контролируемого тока. Наиболее близким к изобретению по технической сущности является электропривод постоянного тока-, содержащий электродвигатель с измерительным преобразователем тока якоря п импульсных преобразователей, выхо ды которых через разделительные дио ды объединены и подключены к одному выводу-якоря электродвигателя, другой вьюод которого и входы импульсных прерывателей подключены к блоку питания, и усилитель, выходы которо соединены с управляющими входами импульсных прерывателей 2J. Недостатком известного электропривода также является низкая точность регулирования тока в широком диапазоне его изменения вследствие переменной чувствительности измерительного преобразователя тока якоря определяемой нелинейной зависимость частоты его выходного сигнала от зн чения контролируемого тока якоря электродвигателя. Целью изобретения является повышение точности регулирования тока электродвигателя в широком диапазоне его изменения. Указанная цель достигается тем, что в электропривод, содержащий электродвигатель с измерительным преобразователем тока якоря, п импульсных прерывателей, вькоды которых через разделительные диоды объеди- нены и подключены к одному выводу якоря электродвигателя, другой вывод которого и входы импульсных прерывателей подключены к блоку питания, и усилитель, выходы которого соединены с управляющими входами импульсных прерывателей, введены регистр задания состояний импульсных прерывателей, регистр коррекции и последовательно соединенные преобразователь частота - код, вход которого связан с выходом измерительного преобразователя тока якоря, сумматор, постоянный запоминающий блок и дискретный вычислитель, выходы которого соединены с информационными входами регистра коррекции и регистра задания состояний импульсных прерывателей, выходы которого подключены к входам усилителя вместе с выходом релейно-импульсного регулирования дискретного вычислителя, управляющая выходная шина которого соединена с входами разрешения считывания постоянного запоминающего блока и с входами разрешения записи регистра задания состояний импульсных прерывателей и регистра коррекции, выходы которого подключены к другому входу сумматора. Преобразователь частота - код содержит два последовательно соединенных цифровых блока дифференцирования последовательно соединенные тактовый генератор, блок совпадения, счетчик и регистр памяти, выход которого образует выход преобразователя частота - код, а вход разрешения записи подключен к выходу первого цифрового блока дифференцирования, вход : которого вместе с вторым входом блока совпадения образуют вход преобразователя частота - код, причем выход тактового генератора подключен к синхронизирующим входам цифровых блоков дифференцирования, выход вто3рого из которых соединён с входоя сброса счетчики.. На фиг. i представлена структурная схема электропривода; на фиг. 2 - вариант выполнения преобра зователя частота - код, на фиг. 3 блок-схема алгоритма работы дискрет ного вычислителя. Электропривод постоянного тока содержит электродвигатель 1 (фиг.1) с измерительным преобразователем 2 тока якоря, шунтированный обратным диодом 3, п импульсных прерывателей 4 .- 4|, выходы которых через разделительные диоды 5 объединены и подключены к одному выводу якоря электродвигателя 1, другой вывод которого и входы импульсных прерывателей 4 - 41, подключены к 6 питания. Усилитель 7 своими вы ходами соединен с управлякнцими входами импульсных прерывателей 4 4 Электропривод также содержит регистр 8 задания состояний импульсных прерывателей, регистр 9 коррекции, последовательно соединенные преобразователь 10 частота - код, с:/мматор 11, постоянный запоминающи блок 12 и дискретный вычислитель 13 выходы которого соединены с информа ционными входами регистра 9 коррекции и регистра 8 задания состояний импульсньос прерывателей, выходы которого подключены к входами усилите ля 7 вместе с выходом релейно-импульсного регулирования дискретного вычислителя 13, управляющая выходна шина которого, соединена с входами разрешения считывания постоянного запоминающего блока 12 с входами ра решения записи регистра 8 задания состояний импульсных прерывателей и регистра 9 коррекции, выходы которо го подключены к другому входу сумматора 11. Преобразователь 10 частота - код содержит два последовательно соединенных цифровых блока 14 и 15 дифференцирования (фиг. 2), которые выполнены соответственно на триггерах 16, 17 и триггерах 18, 19, последовательно соединенные тактовый генератор 20, блок 21 совпадения, счетчик 22 и регистр 3 памяти, выход которого образует выход преобразователя 10 частота-кол, а вход разрешения записи подключен к выходу первого цифрового блока 14 диффе 1« ренцирования, вход которого вместе с вторым входом блока 21 совпадения образуют вход преобразователя 10 частота-код. Выход тактового генератора 20 к синхронизирующим входам цифрйймх блоков 14 и 15 дифференцирования, выход последнего из которых соединен с входом сброса счетчика 22. Принцип работы дискретного вычислителя 13 (фиг. 1) реализует релейно-импульсный способ управления первым импульсным прерьшателем 4 и логическое управление остальными импульсными прерывателями В соответствии с алгоритмом функционирования дискретный вычислитель 13 обеспечивает формирован11е управляющих сигналов первым импульсным прерывателем 4. на первой структуре управления при относительной продолжительности включения у 0,5 (шаги 24,25,26, фиг. 3), или на второй у 0,5 (шаги 27,28,29). Контроль у (времени включенного состояния первого импульсного прерывателя 4 осуществляется таймером дискретного вычислителя 13 (фиг. 1). На первой структуре управления открывание первого импульсного прерывателя 4 и включение таймера дискретного вычислителя 13 осуществляется с постоянной частотой, а закрывание первого и включение последнего по релейному способу. На второй структуре управления закрывание первого импульсного прерывателя 4 и выключение таймера дискретного вычислителя 13 осуществляется с постоянной частотой, а открьюание первого и включение последнего -, по релейному способу. Определение момента достижения (первая структура управления) или спадания (.вторая структура управления) текущего значения тока i от величины уставки 1 (соответственно шаги 24 и 27, фиг. 3) определяется экстраполирующим способом. Переключение с первой структуры управления на вторую (шаг 30), и наоборот (шаг 31), осуществляется при ,5± Дупутем запрета управляющего импульса, сформированного по релейному способу, и разрешение импульсов постоянной частоты на соответствующие входы таймера дискретного вычислителя 13 и первого импульсного прерывателя 4- (фиг. 1).ду необходимо Для однозначного перехода с одной структуры управления на --другую и фор мируется путем задержки управляющего сигнала в дискретном вычислителе 13 на переключение структуры программны способом. При достижении у минимального или максимального значений осуществляется соответственно уменьшение (шаг 32 фиг. 3) или увеличение Сшаг 33) значения кода на регистре 7 задания состояний импульсных прерывателей А2 4f| (фиг. 1). В качестве дискретного вычислителя 13 может быть использован быстродействующий микропроцессорный комплект серии К 589. Электропривод постоянного тока работает следующим образом. С выхода измерительного преобразователя 2 тока якоря (фиг. 1) сигнал, частота которого несет информацию с тока якоря двигателя1, поступает на вход преобразователя 10 частота-код. При токе якоря частота выходного напряжения преобразователя 2 равна f(,. В течение положительного сигнала с преобразователя 2 в блок 21 совпадения (фиг. 2) пропускаются импульсы с тактового генератора 20 на суммирующий счетный вход счетчика 22. Цифровойблок 14 дифференцирования на триггерах 16 и 17. дифференцирует сигнал с преобразователя 2 (фиг. 1) и синхронно с частотой тактового генератора 20 формирует сигнал разрешения записи для регистра 23 памяти и запускает цифровой блок 15 дифференцирования натриггерах 18 и 19, который в свою очередь синхронно с частотой тактово го генератора 20 формирует сигнал разрешения сброса для счетчика 22. Таким образом, выходным сигналом преобразователя 10 частота-код / (фиг. 1) является выходной 16-разряд ный код Z.J, регистра 23 памяти (фиг. 2), который при частоте fg соответствует значению Zj,. Данный код поступает на входьГ 16-разрядного двоичного сумматора 11 (фиг. 1), на ,-другие входы которого поступает код Zj коррекции с регистра 9. Назна чение. сумматора 11, работающего.и ре жиме вычитания, состоит в смещении диапазона изменения кодов преобразователя 10 частота - код таким образом, чтобы наименьшему значению кода соответствовал выходной ответствовал выходной код Zj, сумматора 11, близкий к нулевому. Таким образом, каждому значению кода Zjp , поступающего с сумматора 1 Г на вход постоянного запоминающего блока 12, .соответствует адрес в последнем, по которому расположено скорректированное значение кода Z При поступлении на входы считывания постоянного запоминающего блока 12 по управляющей выходной щи«е дискретного вычис; ителя 13 разрешающих сигналов, значение кода Z. вводится в дискретный вычислитель 13. При пуске двигателя из неподвижного состояния (импульсные прерыватели закрыты) импульсы постоянной частоты от:генератора тактовых импульсов дискретного вычислителя 13 поступают на открывание импульсного прерывателя 4, ток ij, увеличивается. Одновременно запускается таймер дискретного вычислителя 13., Обновление информации о текущем значении тока в цифровой форме Z, осуществляется с частотой измерения „ 1/Т„. Дискретный вычислитель 13 на щаге 24 (фиг. 3) определяет промежуток времени от очередного опроса постоянного запоминающего блока 12 (фиг. 1) до момента совпадения текущего значения тока i с уровнем тока уставки 1 по формуле ,, .J.,iPM , (,, Зп-ч 3h-2 где Z - значение кода, соответствую2 n-2r-значения кодов, соответствующие предыдущему ( ) и следующему (i) моменту из(п-2) мерения ; -скорость нарастания тока я на (п-1) интервале. При .At 72 Т, осуществляется обновление информации о токе якоря (Zj) на п-ом интервале измерения и циклическое вычисление /Itn по формуле (1). При достижении Т на п-ом ийтервале измерения ожидаемое время достижения i величины уставки равно to()+t, - время нарастания „ где t до га-го момента измерения Так как дискретный вычислитель 13 производит вычисления в реальном времени, то после определения разности (4t-Ty) формируется импульс управления, поступающий на закрывание первого импульсного .прерывателя 4 и выключение таймера диск} втного вычислителя 13. При работе на первой структуре управления (,5) происходит циклическое выполнение шагов 24,25,26 (фиг. 3). При достижении 0,5+4у управлени дискретным вычислителем 13 (фиг. 1) производится таким образом, что импульсы постоянной частоты поступают на те входы таймера дискретного вычислителя и импульсного прерывателя, на крторые ранее поступали импульсы управления, сформированные путем вычисления ожидаемого момента достижения in величины ) . При зтом переключение импульсов постоянной частоты на закрывание пер вого импульсного прерывателя 4., и вы ключение таймера дискретного вычисли теля 13 приводит к тому, что ток i ц превьшает значение уставки на величи ну л , определяемую частотой коммутации . На второй структуре управления (,5) вычисление ожидаемого момента спадания i до величины 1, и формирование сигналов управления таймером дискретного вычислителя 13 и пер вым импульсным прерывателем 4 (шаги 27, 28, 29, фиг. 3) осуществляется аналогично, как и на первой. Переключение со второй на nepBjno структуру при ,5-4 у осуществляется путем коммутации импульсов управления таймером дискретного вычислителя 13 и импульсным прерывателем 4 (фиг. 1): на открывание импульсного прерывателя 4 и включение таймера дискретного вычислителя 13 поступают импульсы постоянной частоты; на за- крывание импульсного прерывателя и выключение таймера дискретного вы числителя 13 поступают импульсы управления, формируемые путем-определения ожидаемого момента достижения i величины I,,. При увеличении f до максимального значения (y Tmdx фиг. 3) на выходной информационной шине дискретного вычислителя 13 (фиг. 1) и, следовательно, на регистре 8 задания состояний импульсных прерывателей формируется значение кода Zp больше предьщущего не единицу младшего разряда. Если в первоначальный момент значение кода , что соответствует закрытым импульсным прерывателям то при увеличении Z на единицу открывается импульсный прерыватель 4|.. . Мгновенное значение напряжения на двигателе 1 при этом равно ид.,.х Как известно, точность системы автоматического управленияопределяется величиной ошибки измерительного преобразователя тока. Отличие действительного значения коэффициента передачи измерительного преобразователя регулируемой величины Kj от его теоретического значения К определяет значение ошибки этого преобразователя . Основным источником погрешности остается возможное отличие коэффициента передачи канала измерения от его теоретического значения. Из этого следует, что необходимо исключать нестабильность измерительного преобразователя. При помощи постоянного запоминающего блока производится корректировка показаний измерительного преобразователя тока таким образом, что полностью исключается нестабильность последнего, определяя тем самым его стабильную чувствительность в широком диапазоне изменения. Наиболее эффективно использование изобретения в позиционных электроприводах постоянного тока.
Фиг.1
ь
ff
fl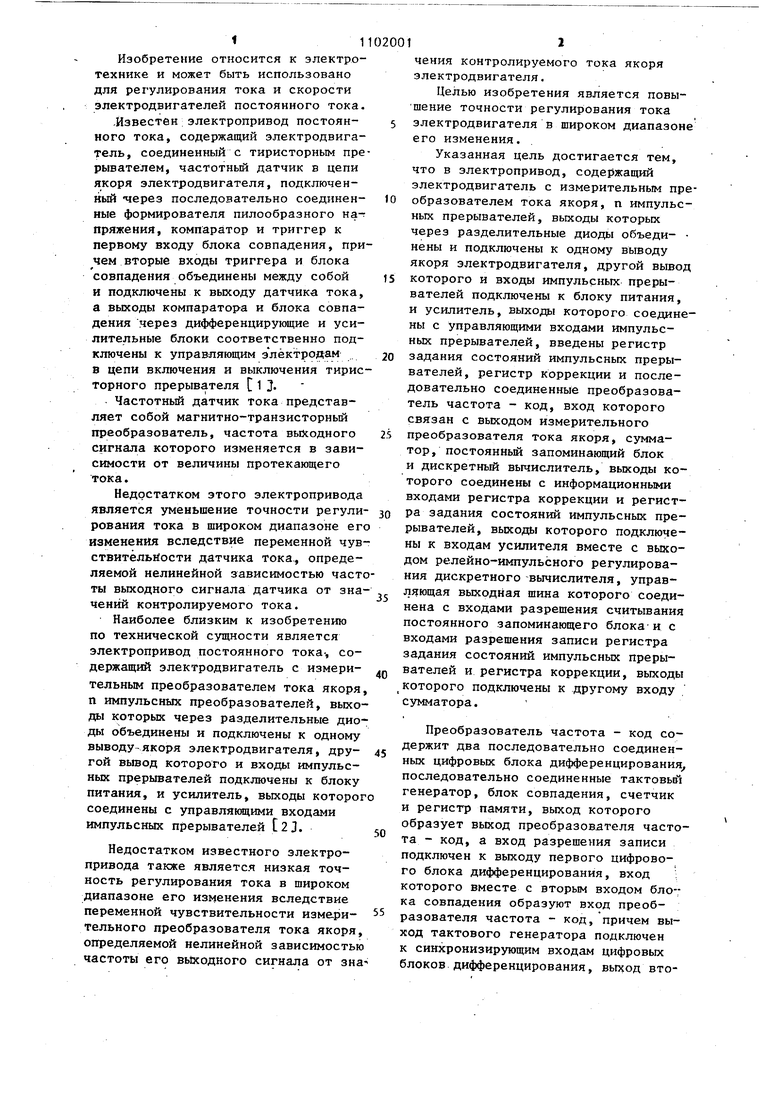
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления двигателем постоянного тока | 1983 |
|
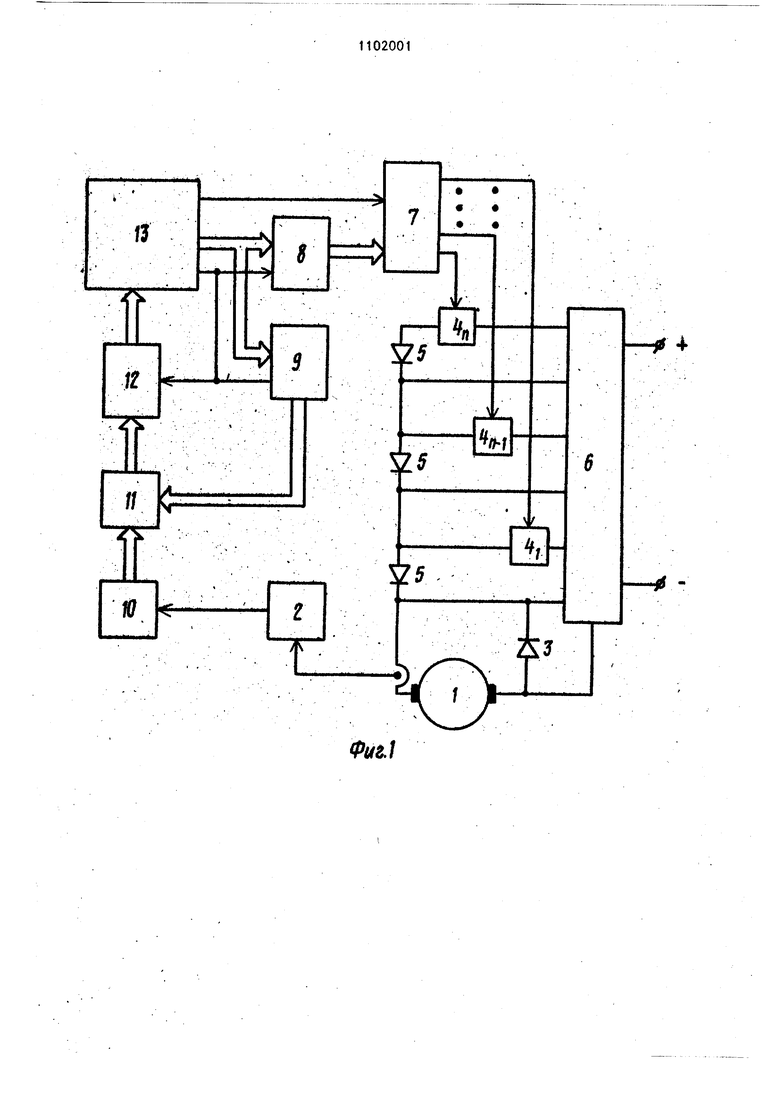
SU1104630A1 |
| МИКРОПРОЦЕССОРНЫЙ ЭЛЕКТРОПРИВОД | 1998 |
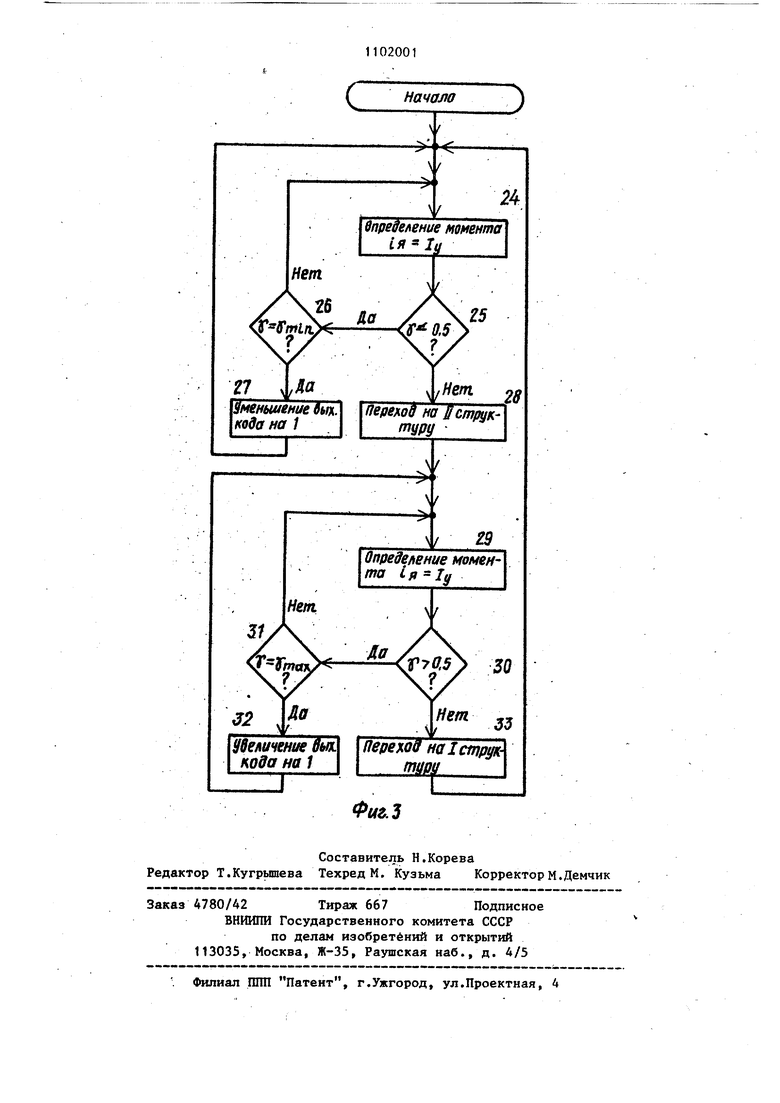
|
RU2141164C1 |
| Электропривод | 1983 |
|
SU1365320A1 |
| Электропривод | 1987 |
|
SU1476584A1 |
| Электропривод постоянного тока | 1990 |
|
SU1798881A1 |
| Дискретно-цифровой электропривод | 1985 |
|
SU1350800A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРОЦЕССОМ ДУГОВОЙ СВАРКИ НЕПЛАВЯЩИМСЯ ЭЛЕКТРОДОМ В СРЕДЕ ЗАЩИТНЫХ ГАЗОВ | 1991 |
|
RU2077415C1 |
| Устройство для релейного регулирования тока электродвигателя с постоянной частотой переключений | 1982 |
|
SU1120472A1 |
| Электропривод постоянного тока | 1989 |
|
SU1646034A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРОЦЕССОМ ДУГОВОЙ СВАРКИ НЕПЛАВЯЩИМСЯ ЭЛЕКТРОДОМ В СРЕДЕ ЗАЩИТНЫХ ГАЗОВ | 1988 |
|
SU1683244A1 |

1. ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА, содержащий электродвигатель с измерительным преобразователем тбка якоря, п импульсных прерывате,лей, вькоды которых через разделитель ные диоды объединены и подключены к одному выводу якоря электродвигателя, другой вывод которого и входы импульсных преобразователей подключены к блоку питания, и усилитель, выходы которого соединены с управляющими входами импульсных прерывателей, отличающийся тем, что, с целью повышения точности регулирования в широком диапазоне изме нения тока, в него введены регистр задания состояний импульсных прерывателей, регистр коррекции и последовательно соединенные преобразователь частота - код, вход которого связан . с выходом измерительногЬ преобразоj вателя тока якоря, сумматор, постоянный запоминающий блок и дискретный вычислитель, выходы которого соединены с информационными входами регистра коррекции и регистразадания сое-, тояний импульсных.прерывателей, ВЫХОА. ды которого подключены к входам усилителя вместе с выходом релейно-импульсного регулирования дискретного вычислителяj управляющая выходная шина которого соединена с входами разрешений считывания постоянного запоминающего блока и с входами разрешения записи регистра задания состояний импульсных прерывателей и регистра ё коррекции, выходы которого подключены «Л к другому входу сумматора. 2. Электропривод по п. 1, о т л и чающийся тем. что преобразователь частота - код содержит два последовательно соединенных цифровых блока дифференцирования, последовательно соединенные тактовый генератор, блок совпадения, счетчик и регистр памяти, выход которого образует выход преобразователя частота код, а вход разрешения записи подключен к выходу первого цифрового бло|ка дифференцирования, вход которого вместе с вторым входом блока совпадения образуют вход преобразователя частота - код, причем выход тактового генератора подключен к синхронй-зирующим входам цифровых блоков дифференцирования, выход второго из которых соединен с входом сброса счетчика.
0
к
ti
У
и
- к
Начало
2
f
впределение момента 1я1,
Перемена аструктуру
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для регулирования тока электродвигателя | 1979 |
|
SU773882A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для управления электродвигателем постоянного тока | 1981 |
|
SU1001407A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
