f-BoDf.
ел
ел со to ел
(риеЛ
Изобретение относится к электротехнике и может быть использовано в автоматизированном электроприводе переменного тока с частотно-токовым управлением.
Цель изобретения - повышение быстродействия путем уменьшения погрешности воспроизведения изменяющихся по
зы tр и запаздывает относительно первой гармоники Е „ на угол нагрузки
1/0 - arctgw Т„, где U - частота входного сигнала;
Т - постоянная времени нагрузки. Устройство работает следующим образом.
Сигнал заданной частоты tu посту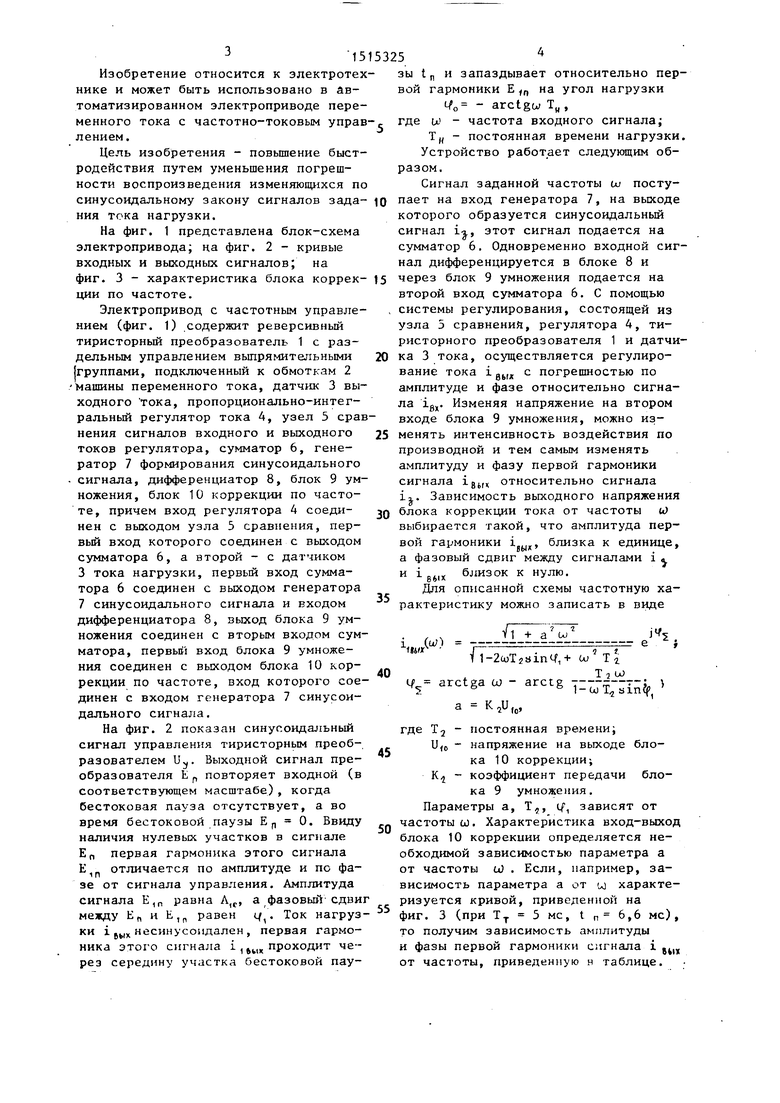

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод | 1986 |
|
SU1385217A1 |
| Частотно-управляемый электропривод | 1989 |
|
SU1720138A1 |
| Устройство для управления трехфазным непосредственным преобразователем частоты | 1976 |
|
SU663063A1 |
| Устройство для управления вентильным преобразователем | 1985 |
|
SU1277319A1 |
| ДАТЧИК РЕАКТИВНОЙ МОЩНОСТИ РЕЗКОПЕРЕМЕННОЙ НАГРУЗКИ ДЛЯ УПРАВЛЕНИЯ СТАТИЧЕСКИМ КОМПЕНСАТОРОМ РЕАКТИВНОЙ МОЩНОСТИ | 2012 |
|
RU2488204C1 |
| Способ управления асинхронным электроприводом и устройство для его осуществления /его варианты/ | 1982 |
|
SU1538212A1 |
| УСТРОЙСТВО КОМПЕНСАЦИИ ВЫСШИХ ГАРМОНИК, АДАПТИРОВАННОЕ К ЭЛЕКТРОПРИВОДУ ПЕРЕМЕННОГО ТОКА | 2016 |
|
RU2619919C1 |
| Устройство для управления статическим тиристорным компенсатором | 1985 |
|
SU1309175A1 |
| Устройство для управления электроприводом переменного тока | 1986 |
|
SU1317635A1 |
| Частотно-управляемый электропривод | 1988 |
|
SU1677840A2 |
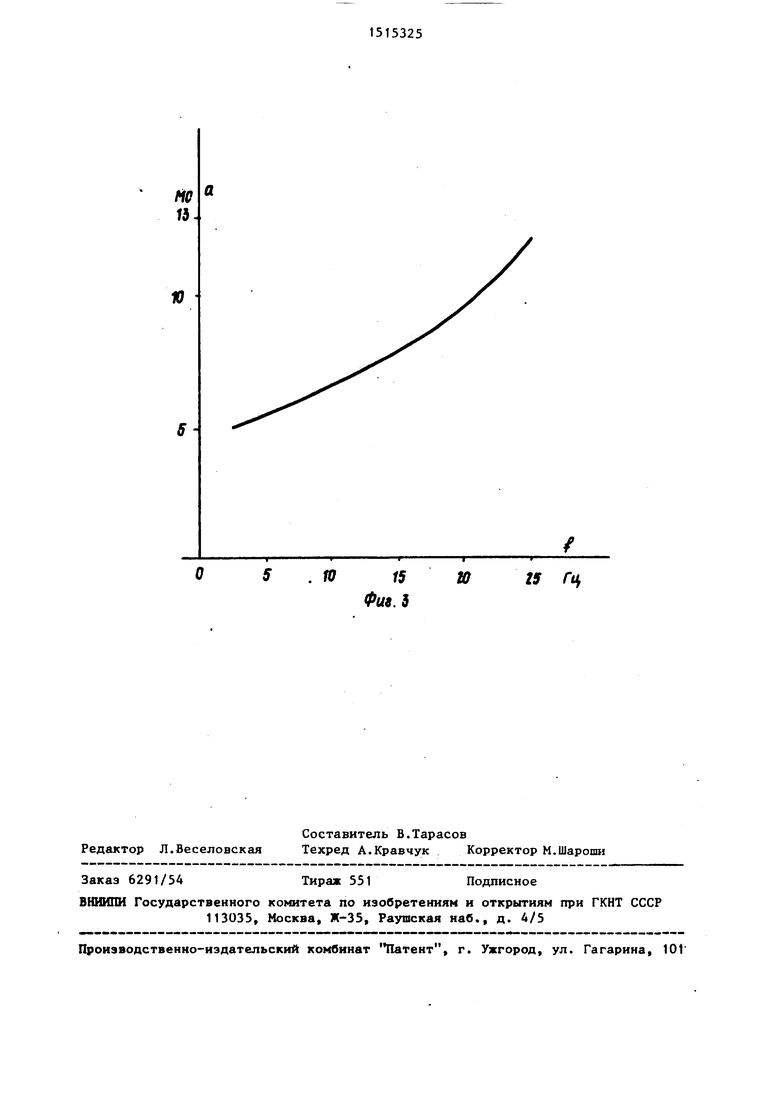
Изобретение относится к электротехнике и может быть использовано в тиристорных электроприводах переменного тока с частотно-токовым управлением, в которых использованы реверсивные тиристорные преобразователи с раздельным управлением выпрямительными группами. Цель изобретения - повышение быстродействия путем уменьшения погрешности воспроизведения изменяющихся по синусоидальному закону сигналов задания тока нагрузки. Электропривод содержит преобразователь частоты 1, к которому подключен двигатель 2. Система регулирования обеспечивает частотно-токовое управление. Используются блок умножения 9, на один из входов которого подается производная сигнала задания, а выходной сигнал суммируется с этим сигналом, блок коррекции тока 10, выход которого связан со вторым входом блока умножения, а на вход блока коррекции поступает напряжение, пропорциональное частоте задающего сигнала. 3 ил.
синусоидальному закону сигналов зада- ю пает на вход генератора 7, на выходе
ния тока нагрузки.
На фиг. 1 представлена блок-схема электропривода; на фиг. 2 - кривые входных и выходных сигналов; на
фиг. 3 - характеристика блока коррек- 15 через блок 9 умножения подается на ции по частоте.второй вход сумматора 6. С помощью
Электропривод с частотным управле- . системы регулирования, состоящей из нием (фиг. 1) содержит реверсивный узла 5 сравнения, регулятора 4, ти- тиристорный преобразователь 1 с раздельным управлением выпрямительными
20
ристорного преобразователя 1 и датчи ка 3 тока, осуществляется регулирование тока i g,g с погрешностью по амплитуде и фазе относительно сигнагруппами, подключенный к обмотрсам 2 1 ашины переменного тока, датчик 3 выходного тока, пропорционально-интегральный регулятор тока 4, узел 5 сравнения сигналов входного и выходного токов регулятора, сумматор 6, генератор 7 формирования синусоидального сигнала, дифференциатор 8, блок 9 умножения, блок 10 коррекции по частоте, причем вход регулятора 4 соединен с выходом узла 5 сравнения, пер- вьй вход которого соединен с выходом сумматора 6, а второй - с датчиком 3 тока нагрузки, первый вход сумматора 6 соединен с выходом генератора 7 синусоидального сигнала и входом дифференциатора 8, выход блока 9 умножения соединен с вторьм входом сумматора, первьй вход блока 9 умножения соединен с выходом блока 10 коррекции по частоте, вход которого соединен с входом генератора 7 синусоидального сигнала.
На фиг. 2 показан синусоидальный сигнал управления тиристорным преобразователем и. Выходной сигнал преобразователя Е р повторяет входной (в соответствующем масштабе), когда бестоковая пауза отсутствует, а во время бестоковой паузы Ер 0. Ввиду наличия нулевых участков в сигнале ЕП первая гармоника этого сигнала Е отличается по амплитуде и по фазе от сигнала управления. Амплитуда сигнала Е,р равна Л,, а фазовый сдвиг между Е„ и Е,„ равен ц. Ток нагрузки ijy несинусоидален, первая гармоника этого сигнала i, , проходит через середину участка бестоковой паукоторого образуется синусоидальный сигнал i, этот сигнал подается на сумматор 6. Одновременно входной сигнал дифференцируется в блоке 8 и
системы регулирования, состоящей из узла 5 сравнения, регулятора 4, ти-
ристорного преобразователя 1 и датчика 3 тока, осуществляется регулирование тока i g,g с погрешностью по амплитуде и фазе относительно сигнаа 1
вх
Изменяя напряжение на втором входе блока 9 умножения, можно из- менять интенсивность воздействия по производной и тем самым изменять амплитуду и фазу первой гармоники сигнала ig,, относительно сигнала ii. Зависимость выходного напряжения блока коррекции тока от частоты и) выбирается такой, что амплитуда пер
вой гармоники i
ВЫ«
35
близка к единице,
а фазовый сдвиг между сигналами i . и i „,v близок к нулю.
Б о л
Для описанной схемы частотную характеристику можно записать в виде
е - Ь
0
5
0
5
. , ,,Vl + аи,
Ш,
У 1-2coT2aintf,+ ы Тг
5 - g Т -Д-Лп, а К,и,„,
где Tj - постоянная времени;
11,0 - напряжение на выходе блока 10 коррекции-, К - коэффициент передачи блока 9 умножения. Параметры а. Т,, (/, зависят от частоты to. Характеристика вход-выход блока 10 коррекции определяется необходимой зависимостью параметра а от частоты U) . Если, например, зависимость параметра а от w характеризуется кривой, приведенной на фиг. 3 (при Т 5 мс, t п 6,6 мс), то получим зависимость амплитуды и фазы первой гармоники сигнала i j, от частоты, приведенную н таблице.
Таким образом, использование изобретения позволяет уменьшить амплитудную и фазовую погрешности регулирования тока нагрузки в тирис- торных электроприводах с частотно- токовым управлением, что увеличивает их быстродействие.
Формула изобретения
/
Электропривод с частотно-токовым управлением, содержащий реверсивный вентильный преобразователь с раздельным управлением выпрямительными группами, выходы которого подключены к обмоткам машины переменного тока, пропорционально-интегральный регулятор тока нагрузки, подключенный выходом к управляющим входам преобразователя, а входом - к сравнеФие.1
ния, первый вход которого соединен с выходом сумматора, а второй - с датчиком тока нагрузки, первы вход сумматора соединен с выходом генератора синусоидального сигнала и с входом дифференциатора, отличающийся тем, что, с целью повышения быстродействия путем уменьшения
погрешности воспроизведения изменяющихся по синусоидальному закону сигналов задания тока нагрузки, введены блок умножения и блок коррекции по частоте, при этом выход блока
умножения соединен с вторым входом сумматора, первый вход блока умножения соединен с выходом дифференциатора, а второй вход - с выходом .блока коррекции, вход которого соединен с входом генератора синусоидального сигнала.
( Кык
MO 1i
Фиг.З
Редактор Л.Веселовская
Составитель В.Тарасов
Техред А.Кравчук Корректор М.Шароши
Заказ 6291/54
Тираж 551
ВНИШШ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
15 Гц
Подписное
| Слежановский О.В | |||
| и др | |||
| Система подчиненного регулирования электроприводов переменного тока с вентильными преобразователями | |||
| - М.: Энергоатом- издат, 1983, рис | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Энштейн И.И | |||
| Автоматизированный электропривод переменного тока | |||
| М.: Энергоатомиздат, 1982, рис | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
