00 00 СЛ Is3
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления двигателем двойного питания | 1987 |
|
SU1515326A1 |
| Частотно-управляемый электропривод | 1989 |
|
SU1720138A1 |
| Частотно-регулируемый электропривод | 1979 |
|
SU826543A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Способ регулирования углового положения ротора двигателя двойного питания | 1987 |
|
SU1436265A2 |
| Электропривод переменного тока | 1984 |
|
SU1464276A1 |
| Регулируемый асинхронный электропривод | 1981 |
|
SU955483A1 |
| Способ регулирования углового положения ротора двигателя двойного питания | 1987 |
|
SU1524153A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2013 |
|
RU2512873C1 |
| Устройство для частотного управления асинхронным электродвигателем рольганга прокатного стана | 1983 |
|
SU1100701A1 |
Изобретение относится к электротехнике. Целью изобретения является улучшение динамических показателей и повышение надежности путем уменьшения колебаний угла нагрузки и скорости в переходных режимах при изменении частоты управления Указанная цель достигается тем, что в электроприводе блок 11 коррекции снабжен дополнительным входом, подключенным к выходу блока 9 задания угла нагрузки, и выполнен в виде адаптивного регулятора с перестраиваемыми в зависимости от заданного угла нагрузки параметрами. Блок коррекции 1 1 добавляет к приращению амплитуды напряжения управления дифферендаальную составляющую. Такое звено компенсирует инерционность двигателя 1 двойного питания и позволяет при изменении- частоты сигнала управления в динамике менять автоматически амплитуду напряжения управления так, чтобы требуемый дополнительный момент создавался за счет изменения амплитуды напряжения, а угол нагрузки оставался неизменным. ,2 ил. i (Л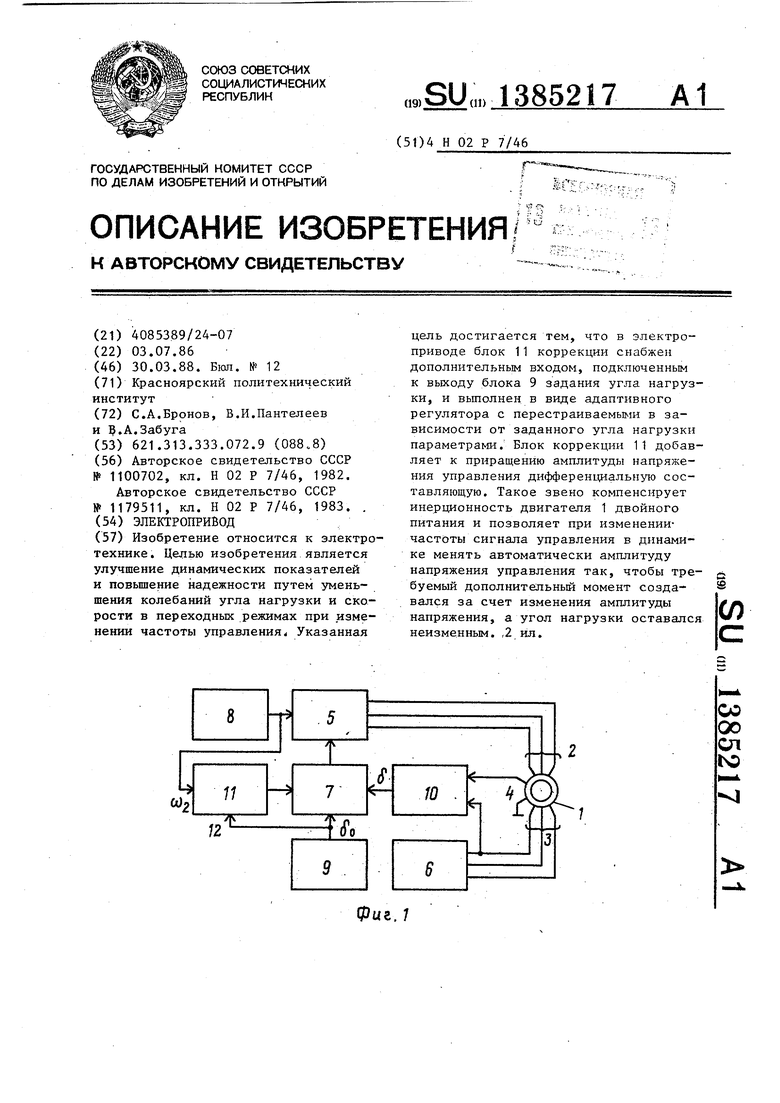
фцг. 7
1
Изобретение относится к электротехнике, а именно к управляемому электроприводу переменного тока, и может быть использовано, в частности, при создании низкоскоростных следя- П5ИХ систем с исполнительным двигателем двойного питания.
Цель изобретения - улучшение динамических показателей и повышение надежности путем уменьшения- колебаний угла нагрузки и частоты вращения в переходных режимах при изменении частоты сигнала управления.
13
Fla фиг.1 представлена функциональ- 5 Равления 8 формирует требуемое прираная схема электропривода; на фиг.2 - фун циональная схема возможного выполнения блока коррекции.
Электропривод содержит индикаторный двигатель двойного питания 1 (фиг.1) с обмоткой управления 2, обмоткой возбуждения 3 и сигнальной обмоткой 4, управляемый и неуправляемый инверторы 5 и 6, к выходам которых подключены обмотки управления 2 и возбуждения 3 соответственно, регулятор амплитуды сигнала управления 7, соединенный своим выходом с амплитуд20
25
щение частоты вращения. Для перехода на новую скорость вращения необходимо создать дополнительный электромагнитный момент, неуравновешенный моментом сопротивления на валу. Этот момент может быть создан в двигателе двойного питания 1 двумя способами: за счет изменения угла нагрузки и за счет изменения амплитуды напряжения управления. Если напряжение управления изменяется только по частоте, а амплитуда его остается постоянной, то дополнительный электромагнитный момент обеспечивается только за счет
щение частоты вращения. Для перехода на новую скорость вращения необходимо создать дополнительный электромагнитный момент, неуравновешенный моментом сопротивления на валу. Этот момент может быть создан в двигателе двойного питания 1 двумя способами: за счет изменения угла нагрузки и за счет изменения амплитуды напряжения управления. Если напряжение управления изменяется только по частоте, а амплитуда его остается постоянной, то дополнительный электромагнитный момент обеспечивается только за счет
в соответствии с уравнением
g- Ыр- W, +),,(1)
где сС - угол нагрузки;
скорость вращения ротора;
ным входом управляемого инвертора 5,
блок задания частоты сигнала управле- 30 У, нагрузки, который изменяется ния 8, подключенный выходом к частотному входу управляемого инвертора 5, блок задания угла нагрузки 9, датчик угла нагрузки 10 и блок коррекции 11, каждый из KOTopbix соединен своим вы- ч ходом с соответствующим входом упомянутого регулятора амплитуды 7, при этом к первому входу датчика угла нагрузки 10 подключена сигнальная обмотка 4, ко второму входу - выход не- 40 управляемого инвертора 6, а основной вход блока коррекции 11 соединен с выходом блока задания частоты управления 8.
w
1
ШрU.,частоты возбуждения и управ . ления (круговые частоты напряжений неуправляемого и уп- ра:вляемого инверторов 6, 5 соответственно; времяi /
Из указанного уравнения следует, tiTo при постоянстве частоты ы и изменении частоты Wjвозникает прира- Кпок коррекции 11 снабжен дополни-д щение угла нагрузки, так как скорость
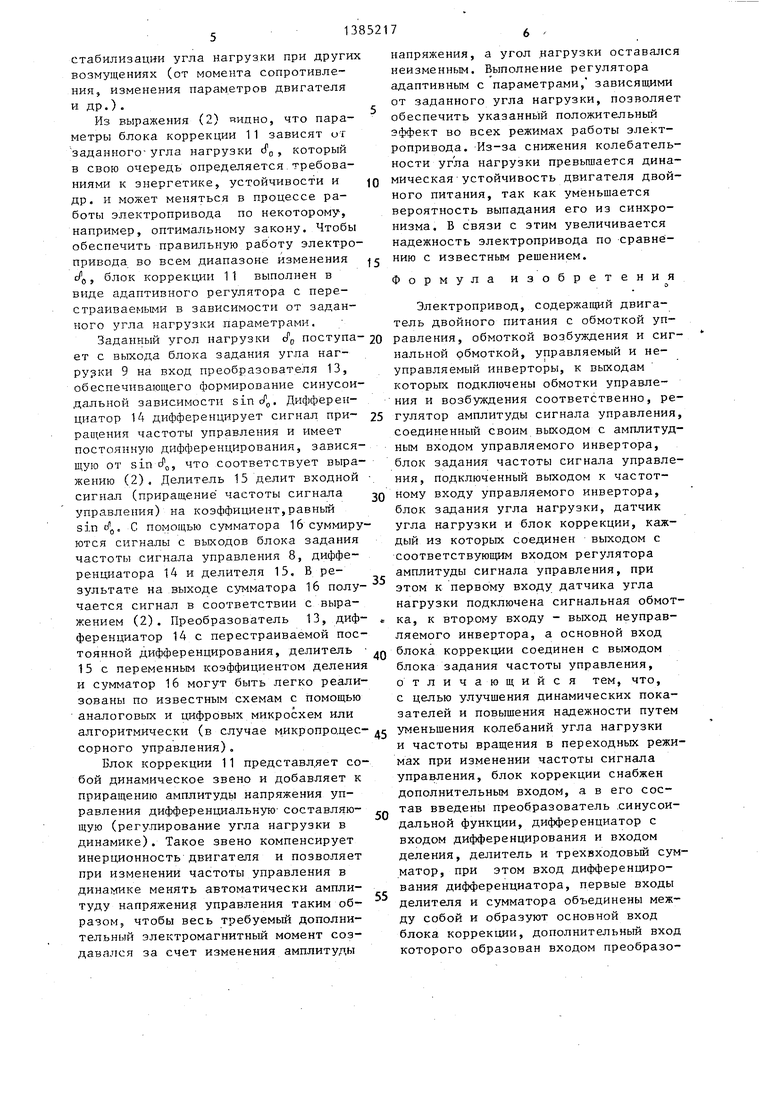
t тельным входом 12. В состав блока Коррекции 11 введены преобразователь синусоидальной функции 13 (фиг.2), дифференциатор 14 с входом дифференцирования и входом деления, делитель 15 и трехвходовьй сумматор 16. При этом, вход дифференцирования дифференциатора. 14,, первые входы делителя 15 и сумматора 16 объединены между собой и образ тот основной вход блока коррекции 11, дрполнительньш вход которого образован входом преобразователя синусо{здальной функции 13 и подключен к выходу блока задания угла
50
55
вращения ротора w из-за инерционности двигателя двойного питания какое- то время остается неизменной. Это приращение угла нагрузки приводит к появлению дополнительного электромагнитного момента, обеспечивающего ускорение, необходимое для перехода на новую скорость вращения. При таком регулировании .колебания угла нагрузки и скорости вращения имеют большую амплитуду и медленно затухают.
Если включена обратная связь через датчик угла нагрузки 10 и регулятор амплитуды 7, то при отклонении
1385217
нагрузки 9. Выход преобразователя синусоидальной функции 13 соединен со вторым входом делителя 15. Выходы делителя 15 и дифференциатора 14 подключены соответственно ко второму и третьему входам сумматора 16, выход которого образует выход блока коррекции 11.
Электропривод работает следующим образом.
Пусть требуется изменить скорость вращения двигателя двойного питания 1. Блок задания частоты сигнала уп0
5
щение частоты вращения. Для перехода на новую скорость вращения необходимо создать дополнительный электромагнитный момент, неуравновешенный моментом сопротивления на валу. Этот момент может быть создан в двигателе двойного питания 1 двумя способами: за счет изменения угла нагрузки и за счет изменения амплитуды напряжения управления. Если напряжение управления изменяется только по частоте, а амплитуда его остается постоянной, то дополнительный электромагнитный момент обеспечивается только за счет
етствии с уравнением
- Ыр- W, +),,(1)
угол нагрузки;
скорость вращения ротора;
грузки, который изменяется
частоты возбуждения и управления (круговые частоты напряжений неуправляемого и уп- ра:вляемого инверторов 6, 5 соответственно; времяi /
, наг
t 0
5
вращения ротора w из-за инерционности двигателя двойного питания какое- то время остается неизменной. Это приращение угла нагрузки приводит к появлению дополнительного электромагнитного момента, обеспечивающего ускорение, необходимое для перехода на новую скорость вращения. При таком регулировании .колебания угла нагрузки и скорости вращения имеют большую амплитуду и медленно затухают.
Если включена обратная связь через датчик угла нагрузки 10 и регулятор амплитуды 7, то при отклонении
текущего значения угла нагрузки от заданного значения меняется амплитуда напряжения управления таким образом, чтобы угол нагрузки оставался постоянным.
Физически .это означает, что система старается обеспечить требуемое приращение дополнительного электро- макнитного момента за счет изменения амплитуды напряжения управления, а не за счет изменения угла нагрузки. Колебательность угла нагрузки снижается и процесс затухает быстрее, чем в системе без обратной связи, однако в первый момент после задания приращения частоты сигнала управления неизбежно значительное изменение угла нагрузки, что характерно для систем, использующих принцип регулирования по отклонению. Повысить точность стабилизации угла нагрузки можно за счет увеличения коэффициента в контуре регулирования амплитуды напряжения управления, однако это приводит к снижению устойчивости систе;,мы, а потому недостаточно эффективно.
Для уменьщения колебаний угла нагрузки при изменении частоты управления в электропри воде используется - компенсационная связь, образуемая блоком коррекции 11 и регулятором амплитуды 7. Блок коррекции 11 выполнен в виде пропорционально-дифференциаль- .ного регулятора, что позволяет при формировании амплитуды напряжения управления учесть скорость изменения частоты сигнала управления.
Для индукторного двигателя двойного питания, например, уравнение регу- лятора в операторной форме в отно.си- тельных единицах имеет вид
iU2(p)K (T p-i-l)du.5( р ч- 1 .+
45
К
(2)
де йи - приращение амплитуды напряжения управления;
р - оператор Лапласа;.
и т - коэффициент передачи и постоянная дифференцирования регулятора;.
Т и К - постоянные величины, определяемые через параметры двигателя; awi- приращение частоты сигнала
управления; о заданный угол нагрузки.
Допустим, частота сигнала управления изменилась по некоторому закону (t}, Если бы не бьшо блока коррекции, то угол нагрузки согласно уравнению (1) также изменился бы следующим образом
c(Xt) сГ„ + JW5(t)dt,
5 0 5
Q
Q
5
5
.
так как частота вращения ротора из-за инерционности двигателя в течение некоторого времени остается постоянной.
Однако благодаря действию блока коррекции 11 в соответствии с выражением (2) возникает приращени е амплитуды напряжения управления А1 , создающее дополнительный электромагнитный момент двигателя 1. Наличие дифференциальной составляющей приводит как бы к форсировке момента тем боль- щей, чем выше темп изменения частоты сигнала управления, т.е. учитывается закон изменения ui(t ) , Эта дополнительная составляющая момента изменяет частоту вращения ротора сверх того значения, которое обеспечивается пропорциональной составляющей aU.-z, и (при соответствующей настройке) точно в такой степени, чтобы изменение Wp соответствовало изменению Wj, в результате чего и обеспечивается постоянство угла нагрузки с) сР,, (так как ) . Фактически приращение угла нагрузки, необходимое для создания дополнительного электромагнитного момента, компенсируется соответствующим приращением амплитуды напряжения управления. В реальных системах из-за неточной настройки блока коррекции полной компенсации достичь не удается, но возможно существенное снижение колебательности угла нагрузки и частотное вращение. Электропривод представляет собой комбинированную систему; в нем сочетаются регулирование по отклонению (через датчик угла нагрузки 10) и по возмущению (через блок коррекции 11). Одним из условий высококачественного регулирования по возмущению является возможность точного измерения возмущающего воздействия. В данном случае по отнощению к углу нагрузки возмущающим воздействием является частота- сигнала управления. Сигнал, пропорциональный ей, уже имеется в системе (формируется блоком задания частоты сигнала управления) , поэтому ее измерение.не требуется. Обратная связь способствует
стабилизации угла нагрузки при других возмущениях (от момента сопротивления, изменения параметров двигателя и др.).
Из выражения (2) яидно, что параметры блока коррекции 11 зависят от заданного- угла нагрузки d o , который в свою очередь определяется,требованиями к энергетике, устойчивости и др. и может меняться в процессе ра- электропривода по некоторому, например, оптимальному закону. Чтобы обеспечить правильную работу электропривода во всем диапазоне изменения блок коррекции 1 1 выполнен в виде адаптивного регулятора с перестраиваемыми в зависимости от заданного угла нагрузки параметрами.
Заданный угол нагрузки сГр поступает с выхода блока задания угла наг- руэки 9 на вход преобразователя 13, обеспечивающего формирование синусоидальной зависимости sint/. Дифференциатор 14 дифференцирует сигнал приращения частоты управления и имеет постоянную дифференцирования, зависящую от sind o, что соответствует выражению (2). Делитель 15 делит входной сигнал (приращение частоты сигнала управления) на коэффициент,равный sin с о. С помощью сумматора 16 суммируются сигналы с выходов блока задания частоты сигнала управления 8, дифференциатора 14 и делителя 15. В результате на выходе сумматора 16 получается сигнал в соответствии с выражением (2). Преобразователь 13, дифференциатор 14 с перестраиваемой постоянной дифференцирования, делитель 15 с переменным коэффициентом деления и сумматор 16 могут быть легко реализованы по известным схемам с помощью аналоговых и цифровых микросхем или алгоритмически (в случае микропро.цес- сорного управления).
Блок коррекции 11 представляет собой динамическое звено и добавляет к приращению амплитуды напряжения управления дифференциальную- составляющую (регулирование угла нагрузки в динамике). Такое звено компенсирует инерционность двигателя и позволяет при изменении частоты управления в динамике менять автоматически амплитуду напряжение управления таким образом, чтобы весь требуемый дополнительный электромагнитный момент создавался за счет изменения амплитуды
0
5
0
5
0
5
0
5
0
5
напряжения, а угол нагрузки оставался неизменным. Выполнение регулятора адаптивным с параметрами, зависящими от заданного угла нагрузки, позволяет обеспечить указанный положительный эффект во всех режимах работы электропривода. Из-за снижения колебательности угла нагрузки превышается динамическая устойчивость двигателя двойного питания, так как уменьшается вероятность выпадания его из синхронизма. В связи с этим увеличивается надежность электропривода по сравнению с известным решением.
Формула изобретения
о
Электропривод, содержащий двигатель двойного питания с обмоткой управления, обмоткой возбуждения и сигнальной обмоткой, управляемый и неуправляемый инверторы, к выходам которых подключены обмотки управления и возбуждения соответственно, регулятор амплитуды сигнала управления, соединеннь й своим вькодом с амплитудным входом управляемого инвертора, блок задания частоты сигнала управления, подключенный выходом к частотному входу управляемого инвертора, блок задания угла нагрузки, датчик угла нагрузки и блок коррекции, каждый из которых соединен выходом с соответствующим входом регулятора амплитуды сигнала управления, при этом к первому входу датчика угла нагрузки подключена сигнальная обмотка, к второму входу - выход неуправляемого инвертора, а основной вход блока коррекции соединен с выходом блока задания частоты управления, отличающийся тем, что, с целью улучшения динамических показателей и повышения надежности путем уменьщения колебаний угла нагрузки и частоты вращения в переходных режимах при изменении частоты сигнала управления, блок коррекции снабжен дополнительным входом, а в его состав введены преобразователь .синусоидальной функции, дифференциатор с входом дифференцирования и входом деления, делитель и трехвходовый сумматор, при этом вход дифференцирования дифференциатора, первые входы делителя и сумматора объединены между собой и образуют основной вход блока коррекции, дополнительный вход которого образован входом преобразователя синусоидальной функции и подключен к выходу блока задания угла нагрузки, выход преобразователя синусоидальной функции соединен с вхЬдом деления дифференциатора и вторым
входом делителя, выходы делителя и дифференциатора подключены соответственно к второму и третьему входам сумматора, выход которого образует выход блока коррекции.
Фие.2
| Электропривод | 1983 |
|
SU1100702A2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электропривод | 1983 |
|
SU1179511A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| . | |||
