) 15388
налои от векторов системы опорных ко- лебани)) , обычно медленны по сравнению со скоростью манипуляции сигнала. Ввиду этого частота среза первог о фильтра должна быть намного меньше полосы пропускания канала, а частота среза второго фильтра должна быть
намного меньше полосы среза первого фильтра. В обп(ем случае в состав второго фильтра может входить у-ль постоянного тока, увеличиваюи;ий петлевое усиление, что поднимает точность слежения за изменением ду . 3 ил., 1 табл.

| название | год | авторы | номер документа |
|---|---|---|---|
| АНАЛИЗАТОР ЧАСТОТНО-ВРЕМЕННОГО РАСПРЕДЕЛЕНИЯ МОЩНОСТИ | 1996 |
|
RU2108591C1 |
| МОДЕМ QPSK, МОДИФИЦИРОВАННЫЙ С ЦЕЛЬЮ СУЩЕСТВЕННОГО ПОВЫШЕНИЯ ЧУВСТВИТЕЛЬНОСТИ ПРИЁМНИКА | 2015 |
|
RU2636577C2 |
| ПАРАЛЛЕЛЬНЫЙ КОРОТКОВОЛНОВЫЙ МОДЕМ | 2004 |
|
RU2286648C2 |
| КОГЕРЕНТНЫЙ ПРИЕМНИК МОДУЛИРОВАННЫХ СИГНАЛОВ СО СМЕЩЕНИЕМ (OQPSK) МНОГОКАНАЛЬНОЙ СИСТЕМЫ СВЯЗИ С КОДОВЫМ РАЗДЕЛЕНИЕМ КАНАЛОВ | 2003 |
|
RU2254679C1 |
| УСТРОЙСТВО КВАДРАТУРНОГО ПРИЕМА ЧАСТОТНО- МАНИПУЛИРОВАННЫХ СИГНАЛОВ | 2003 |
|
RU2247474C1 |
| Демодулятор сигналов частотной телеграфии | 1982 |
|
SU1083397A1 |
| СПОСОБ ДЕМОДУЛЯЦИИ СИГНАЛА МНОГОПОЗИЦИОННОЙ ЧАСТОТНОЙ МАНИПУЛЯЦИИ С ЭКВИДИСТАНТНЫМ РАЗНЕСЕНИЕМ ПО ЧАСТОТЕ, ДЕМОДУЛЯТОР ТАКОГО СИГНАЛА И МАШИНОЧИТАЕМЫЙ НОСИТЕЛЬ | 2005 |
|
RU2290749C1 |
| Квазикогерентный демодулятор фазоманипулированных сигналов | 1990 |
|
SU1758898A1 |
| Демодулятор сигналов многократной фазовой манипуляции | 1988 |
|
SU1587659A1 |
| Демодулятор фазоманипулированных сигналов | 1988 |
|
SU1518902A1 |
Изобретение относится к технике радиосвязи. Цель изобретения - расширение диапазона кратностей принимаемых фазоманипулированных сигналов в условиях действия внешних дестабилизирующих факторов. Для достижения цели введены дополнительные каналы обработки, содержащие последовательно соединенные фазовые детекторы 1, компараторы 2 и перемножители 3, а также дополнительные фазовращатели 4 опорного колебания и фазовращатели 5 сигнала, управляемый фазовращатель 8 и дополнительный перемножитель, второй сумматор и второй фильтр. Процессы, вызывающие изменение Δψ (где Δψ - угол отклонения вектора системы сигналов от векторов системы опорных колебаний), обычно медленны по сравнению со скоростью манипуляции сигнала. Ввиду этого, частота среза первого фильтра должна быть намного меньше полосы пропускания канала, а частота среза второго фильтра должна быть намного меньше полосы среза первого фильтра. В общем случае в состав второго фильтра может входить у-ль постоянного тока, увеличивающий петлевое усиление, что поднимает точность слежения за изменением Δψ. 3 ил., 1 табл.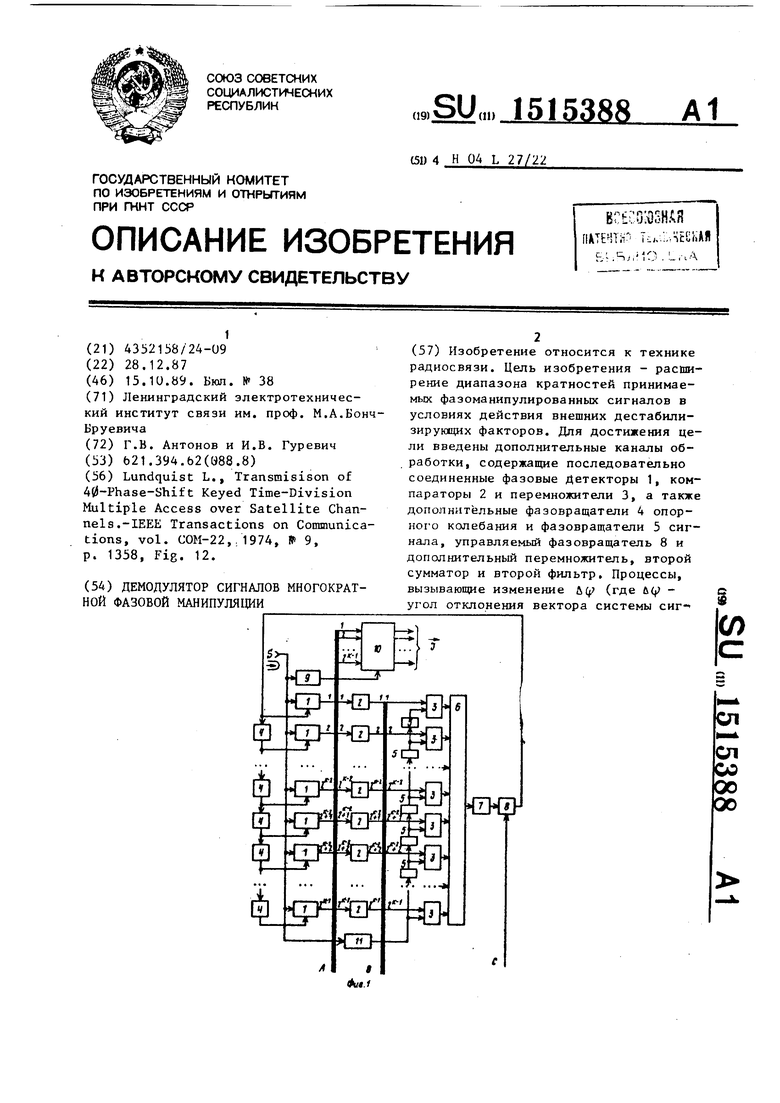
фа 30
Изобретение относится к технике радиосвязи и может быть использовано при построении радиосистём передачи дискретной информации с мног ократной фазовой манипуляцией.
Цель изобретения - расширение ди, апазона кратностеи принимаемых фазо-
манипулированных сигналов в условиях действия внешних дестабилизирующих факторов.
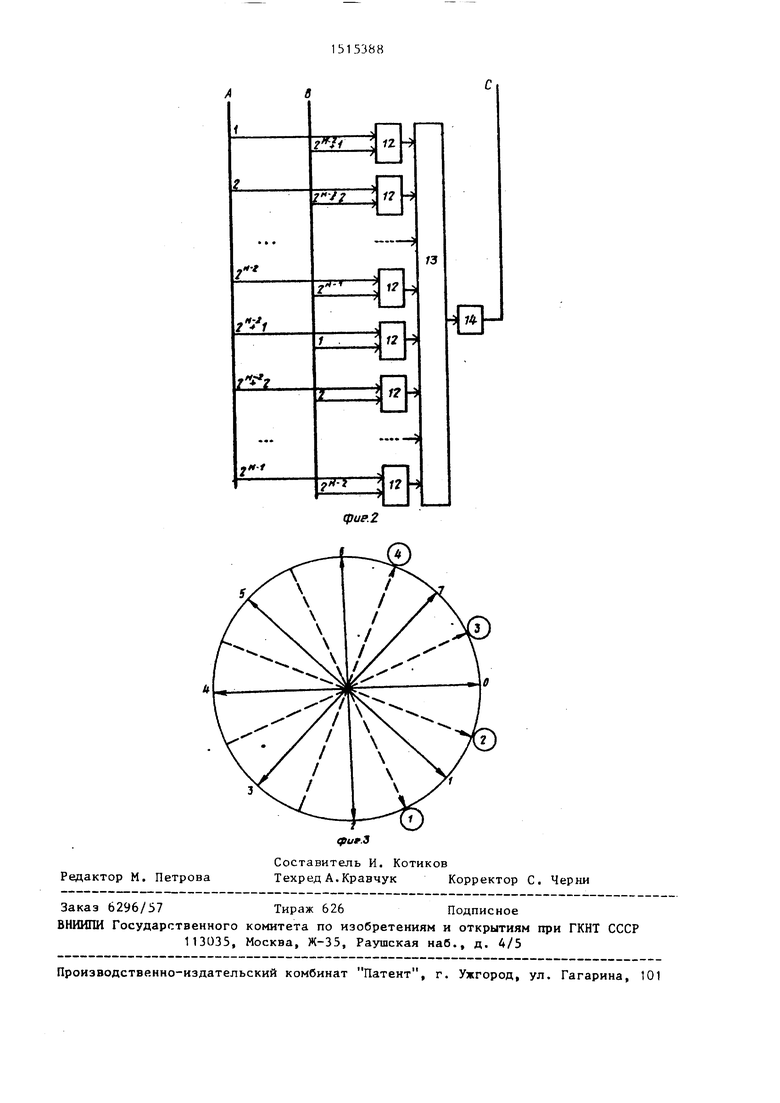
На фи1 . 1 и 2 приведена структурная электрическая схема демодулятора сигналов многократной фазовой манипуля- ,ции; на фиг. 3 - векторная диах рамма сигналов (сплошные линии и опорных колебаний (пунктирные линии).
Демодулятор содержит 2 вьк детектора 1, компаратора 2, 2 перемножителя 3, (2 -1) фазо- ,ателя 4 опорного колебания, (2 - -1) фазовраш,ателя 5 сигнала, первый сумматор 6, первый фильтр 7, управ- ляемый фазовращатель 8, вьщелитель 9 тактовой частоты, решающее устройство 10, блок 11 задержки, 2 . дополнительных перемножителя 12, второй сумматор 13 и второй фильтр 14.
Демодулятор сигналов многократной фазовой манипуляции работает следую- mjiM образом.
Пусть S;(c) - соответствуюш 1Й вариант сигнала. S ; (t) а cos (ut - i- Л1),
i () , &Ч) 27 /N, (1
- соответственно амплитуда 50
и частота сигналаj - опорное колебание, подаваемое на соответствующую ветвь демодулятора.
IT Alp55
U-eos (Ut - 2 2
где и - амплитуда опорного колебания, которую для простоты будем считать равной единице.
При данных соотношениях опорные колебания расположены на биссектрисе углов, образованных соседними вариантами сигналов. Для простоты на фих-. 3 приведена диаграмма, соответствующая . На выходах фазовых детекторов 1,вычисляются проекции пришедших на вход демодулятора сигналов на соответ- ствуюш 1е опорные колебания. Обозначим эти проек1Д1и символом С;; , где i - номер сигнала; j - номер опорно- I o колебания. Очевидно, что
30
з5 40
45
50
55
С ; а cos
(i-j).ACf -|-1. (3)
Обозначим символом С п проекцию сигнала S (t) на опорное колебание, которое отстоит От ) на 1 углов utf/2 независимо от направления обхода,
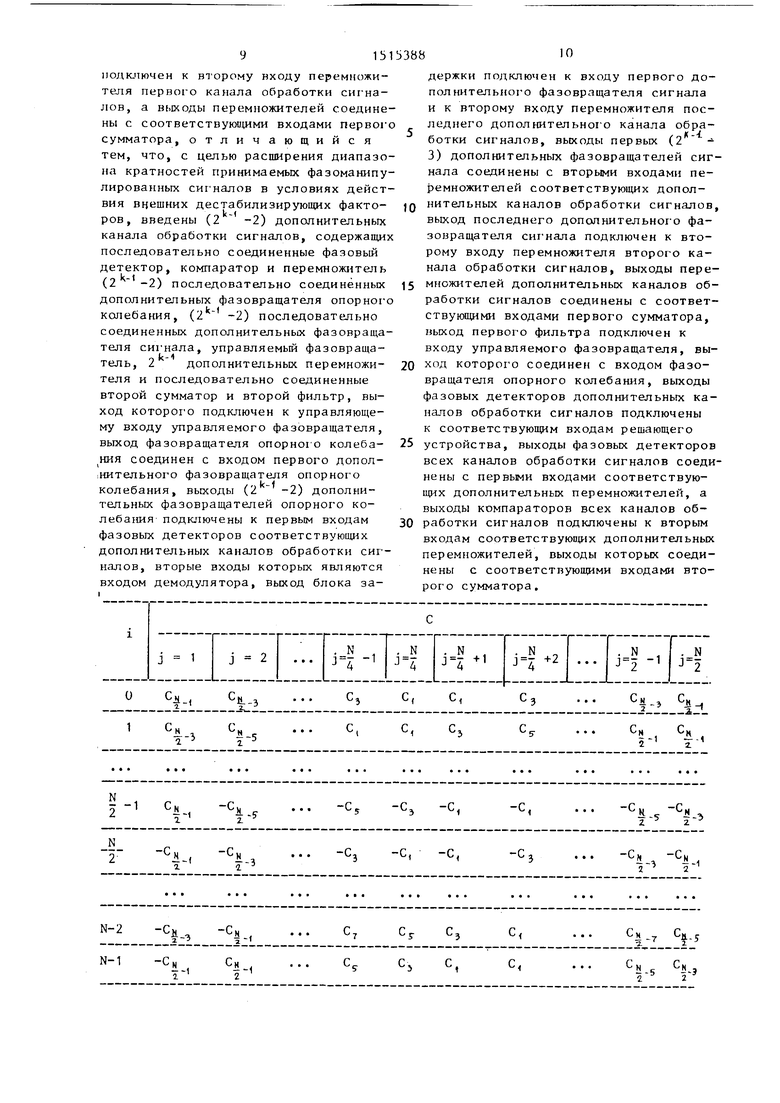
В таблице приведены значения проекций в общем случае. Как следует из фиг. 3, первая строка таблицы симметрична относительно середины, а каждая последующая строка таблицы получается круговым сдвигом предыдущей строки на один элемент влево, причем элемент, переходящей из начала в конец строки приобретает знак минус. Значения инNдексов 1 находятся в пределах (- -1).
Сдвиг фазы сигнала в каждом из фазовращателей 5 равен Лср. На выходах компараторов 2 формируются знаки проекций - SignC ; . Эти знаки поступают на первые входы перемножителей 3. На вторые входы перемножителей 3 пос /N . U
тупает сдвинутый на угол (- -J)A /вариант сигнала, пришедший на вход демодулятора. На выходах перемнЪжителей 3 формируется колебание
COS
cOt-i-ULf +( -j) utfl-Sign Cj; . (4)
Колебание на выходе сумматора 6 определяется соотношением
а
U(t) cosjCOt-i-UCf +( -j) ULp 1 j ,
Sign c;j .(5)
с учетом того, что Atf 27 /N, последнее вьфажение преобразуется к ви- ДУ
ut(t).-|:.o.c..-iiip.
« SignC
i 0,N-1
J следует, что С
(6) О, если
Из (3)
L+j 6 N/2 или i+j 5: N+1; во всех остальных случаях . Раскроем (6) для .
Ввиду того, что при этом сумма индексов меняется от 1 до N/2, все знаковые функции положительны и
:(t) -
27
cos (cot- --)+cos (U t- N
2
2 --)+...+cos(Wc
N
cos j COC +
sin- N
N 27 Л -2 Н
1-1}
Заметим, что начальная фаза последнего слагаемого в (7) равна и .
При увеличении 1 на единицу происходит перемещение всех слагаемых на одно место влево, при этом первое слагаемое становится последним и меняет при этом знак.
С учетом того, что знаковая функция, соответствующая последнему слагаемому, принимает отрицательное значение, можно утверждать, что для всех 1 имеет место соотношение (7).
Таким образом, на выходе сумматора образуется когерентное с сигналом опорное колебание. Блок 11 задержки необходим для выравнивания времен прихода сигнала и определения его проекции.
С выхода сумматора 6 колебание и (с) поступает на фильтр 7, где производится его фильтрация от шумов, а затем на управляемый фазовращатель 8, который обеспечивает необходимые соотношения фаз, определяемые выражениями (1) и (2) .
1ЫЬ388
Управляющий снг нал Uunp поступает на фазовращатель 8 с выхода суммато14
pa 13 через фильтр
Т
ГР
н/Ч
€ н . SignC;;- frr ,Т)J
ti/4
Zc;,signc;,...
i 0,N-1.
(8)
Будем в (8) слагаемые с 1-го по N/4 называть членами положительной суммы, а слагаемые с () по N/2 - слагаемыми отрицательной суммы.
Раскроем (8) для . Очевидно, что в этом случае все знаковые функции положительны.
Используя отмеченное СРОЙСТВО симметрии, получаем
с,Cj + .
.+с,
г - г
i-э
с,
Заметим, что каждому положительному слагаемому соответствует отрицательное.
Увеличим i на единицу, т.е. перейем к следующей строчке таблицы. В этом случае
.1 C -tС5 +
+ С
- CN 35
- Cj - С„ -...-С,+
1
Ясно, что при переходе от 1 О к 1 все слагаемые как положительной, так и отрицательной суммы, за исключением крайних, не изменяются и, скла Q дьшаясь, дают в результате нуль.
Первое слагаемое положительной суммы переходит в отрицательную сумму, первое слагаемое отрицательной суммы переходит в положительную сумму, няя при этом знак, ввиду чего и переходящее первое слагаемое положительной суммы меняет знак. Ввиду того, что переходящие члены не совпадают, каждый из них находит себе противопо ложный знак в той сумме, в которую он переходит, что дает
. 0.
Аналогичные рассуждения позволяют 55 сделать вывод о том, что
для всех вариантов
Таким образом, если расположение векторов сигналов и опорньгх колебаний соответствует соотношениям (1) и (2), управляющее воздействие равно нулю и вся система находится в состоянии равновесия. При этом опорное колебание в н ткной фазе поступает через фазовращатели 4 на фазовые детекторы 1, проек1щи сигналов с выходов фазо- вых детекторов поступают на решающее устройство 10, где выносятся решения о передаваемых символах в моменты времени, определяемые вьделителем 9 тактовой частоты. На выходах компара- торов 2 при этом будут определены зна знаки соответствующих проекций.
Рассмотрим теперь случай, когда по тем или иным причинам векторы системы сигналов, не меняя расположения один относительно другого, отклонились на угол &iy от векторов системы опорных колебаний.
Будем для определенности считать, чтойЦ и. Заметим, что при й(у О, т.е. в состоянии равновесия, члены суммы (8) разбиваются на противоположные пары, что приводит к равенству нулю и мпр, для всех i.
Заметим также, что при Л(; 0 век- торы сигналов, симметрично расположенных относительно некоторох о опорного колебания, имеют одинаковые проекции на это опорное колебание.
Если Л ( О, то указанная симмет- ричность отсутствует. В этом случае каждая пара ранее симметричных векторов дает некоторое отличное от нуля управляющее воздействие Ug:
Ug cosClJ -Л(/)-с05()
1 1,
(9)
t
дущего ясно, что приведенные зависят от номера варианта i. Таким образом.
и
2sin&t,)- sinl---
Е 1 2 БШйЦ.
Ч
(10)
С выходов перемножителей 12 управляющие сигналы Uf (9) поступают на сумматор 13 и образуют сигнал (10), KOTOpbrii, проходя через фильтр
0
5
0
-
0
5
0
5
14, поступает на управляющий вход фазовращателя 8. Под влиянием управляющего напряжения меняется фазовый сдвиг фазовращателя 8 в направлении, компенсирующем .
Когда ц; становится равно нулю или близко к нулю, система приходит в состояние равновесия, фазовые соотношения ст ановятся требуемыми и равно нулю или близко к нулю. Ввиду того, что (10) нечетно относительно лсу , всегда можно получить обеспечивающие устойчивость соотношения между (10) и управляющей характеристикой (зависимостью фазового сдвига от Uunp) фазовращателя 8.
Процессы, вызывающие изменение л 7 обычно медленны по сравнению со скоростью манипуляции сигнала. Ввиду - этого частота среза фильтра 7 должна быть намно1 о меньше полосы пропускания канала, а частота среза фильтра 14 должна быть намного меньше полосы среза фильтра 7. В общем случае в состав фильтра 14 может входить усилитель постоянного тока, увеличиваю- петлевое усиление, что поднимает точность слежения за изменением йС .
Формула изобретения Демодулятор сигналов многократной фазовой манипуляции, содержащий последовательно соединенные первый сумматор и первый фильтр, фазовращатель опорного колебания, фазовращатель сигнала, два канала обработки сигналов, состоящие из последовательно соединенных фазового, детектора, компаратора и переьшожителя, блок задержки и последовательно соединенные вьщели- тель тактовой частоты и решающее устройство, выходы которого являются выходами демодулятора, входы выделителя тактовой частоты, фазовых детекторов и блока задержки являются входом демодулятора, вход фазовращателя опорного колебания подключен к второму входу фазового детектора первого канала обработки сигналов, выход фазовращателя опорного колебания соединен с вторым входом фазового детектора второго канала обработки сигналов, выходы фазовых детекторов подключены к соответствующим входам решающег о устройства, вход фазовращателя сигнала соединен с вторым входом перемножителя второго канала обработки сигналов, выход фазовращателя сигнала
детектор,
(2 -2) последовательно
подключен к второму входу перемножителя первого канала обработки сиг на- лов, а выходы перемножителей соединены с соответствуюищми входами первого сумматора, отличающийся тем, что, с целью расширения диапазона кратностей принимаемых фазоманипу- лированных сиг налов в условиях действия внешних дестабилизирующих факторов, введены (2 -2) дополнительных канала обработки сигналов, содержащих последовательно соединенные фазовый компаратор и перемножитель соединенных дополнительных фазовращателя опорног-о колебания, (2 -2) последовательно соединенных дополнительных фазовращателя сигнала, управляемый фазовращатель, 2 дополнительных перемножителя и последовательно соединенные второй сумматор и второй фильтр, выход которого подключен к управляющему входу управляемого фазовращателя, выход фазовращателя опорного колеба- ния соединен с входом первого допол- |Нительного фазовращателя опорного колебания, выходы (2 -2) дополнительных фазовращателей опорного колебания подключены к первым входам фазовых детекторов соответствующих дополнительных каналов обработки сигналов, вторые входы которых являются входом демодулятора, выход блока задержки подключен к входу первого дополнительного фазовращателя сигнала и к второму входу перемножителя последнего дополнительного канала обработки сигналов, выходы первых (2 3) дополнительных фазовращателей сигнала соединены с вторыми входами пе- ремножителеР соответствующих дополQ нительных каналов обработки сигналов, выход последнего дополнительного фазовращателя сиг нала подключен к второму входу перемножитепя второго канала обработки сигналов, выходы пере5 множителей дополнительных каналов обработки сигналов соединены с соответ- ствуюш 1ми входами первого сумматора, ныход первого фильтра подключен к входу управляемого фазовращателя, вы0 од которого соединен с входом фазовращателя опорного колебания, выходы фазовых детекторов дополнительных каналов обработки сигналов подключены к соответствующим входам решающего
5 устройства, выходы фазовых детекторов всех каналов обработки сигналов соединены с первыми входами соответствующих дополнительных перемножителей, а выходы компараторов всех каналов об0 работки сигналов подключены к вторым входам соответствуюп -1х дополнительньк перемножителей, выходы которых соединены с соответствующими входами второго сумматора.
| Lundquist L., Transmisison of 40-Phase-Shift Keyed Time-Division Multiple Access over Satellite Channels.-IEEE Transactions on Communications, vol | |||
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
| Двухтактный двигатель внутреннего горения | 1923 |
|
SU1358A1 |
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
