Изобретение относится к медицине и может быть использовано для определения месторождения и извлечения из раны металлических инородных тел типа осколка, пули.
Цель изобретения - атравматичное извлечение обнаруженных тел.
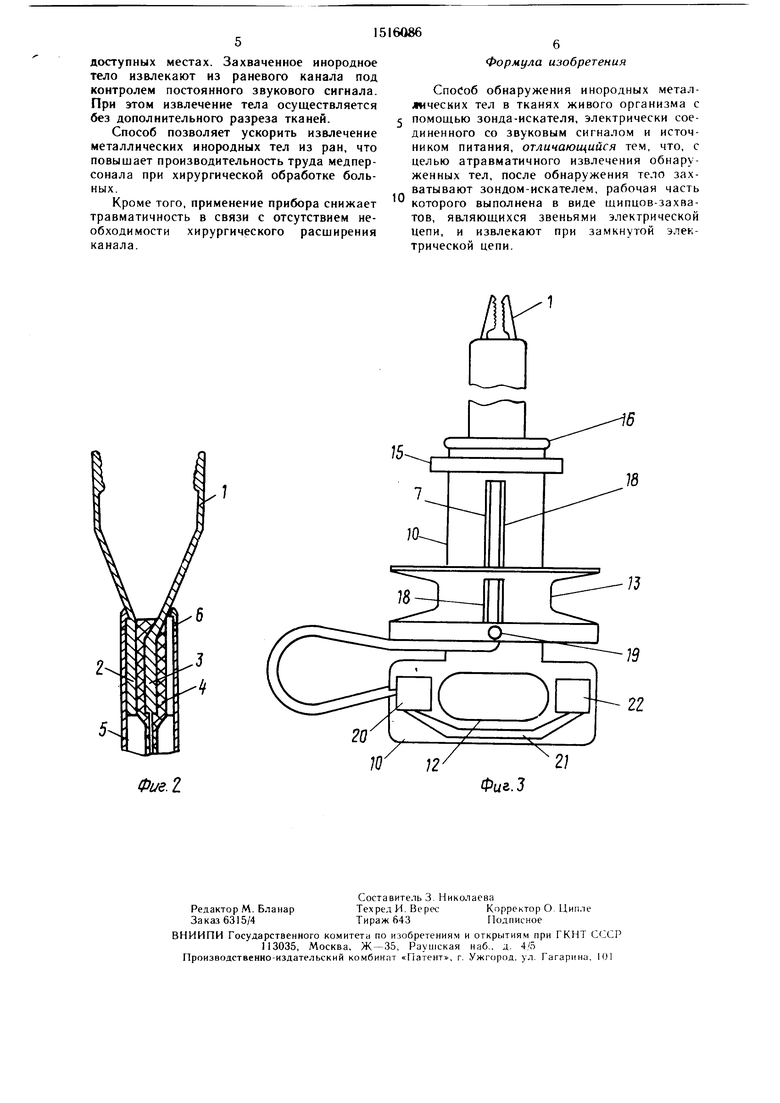
На фиг. 1 изображено устройство для осуществления способа, общий вид, разрез; на фиг. 2 - захват устройства; на фи1 . 3 - устройство, общий вид.
Способ обнаружения ии(.)родных тел в тканях живого организма заключается в обнаружении тела, захвата его стройст- вом - зондом-искателем и извлечение.
Способ осуществляется с помощью зонда- искателя, содержащего захват, состояп1ий из лапок 1 и цоколя, выпо. 1ненного в виде металлической трубки 2, внутри кот()р(;й расположен металлический стержень 3, изолированный от металлической трубки 2 диэлектриком 3. Первая лапка I соединена с металлической трубкой 2. а вторая лапка 1 с металлическим стержнем 3. Цоко.чь помещен в направитель 5, выполненный в виде трубки из проводящего материала и имеет с ним электрический контакт.
Со стороны лапок 1 на наиравителе 5 имеется кольцо 6 из непроводяп1его материала. Кольцо 6 ограничивает расхождение лапок 1 и изолирует их от направи теля 5. Цоколь соединен с тягой 7 протяжным механизмом, представляющим собой гфовод 8 с изолятором 9. при этом один конец провода 8 имеет электрический контакт с металлическим сте)жнем 3 Напра витель 5 закреплен с проводящим держателем 10, который имеет подвижную ручку 1 1 для указательного и среднего пальцев и овальное отверстие 12 для большого пальца . Для удобства удержания ручки 11, она снабжена пазом 13. На внешней поверхности держателя 10 имеется резьба 14, по которой перемещается ограничительная гайка 15. Со стороны направителя о движение гайки 15 ограничено выступом 16. Внутри держателя выполнено продольное отверстие 17, в которое помещена тяга 7
Гяга 7 про.ходпт череч (аираиляюии-е отверстие Ж (фи1 . 1| 1 и .(ажага фиксирующим винтом 19 конец и)и вода 8 соединен с O.IHHM в.ол1)м liiianKa- тора 20. )й вход ког(1|к)ч) с помощью изолированно -о провода LM соединен с одним выходом И1 тг)чника 22 питания. )i iii;i- ход источника пигания сги-диноп . iipoBo- дящим корпусом )жа п. 1Я К) 11 |дикаго|1 20 и источник 22 uiraiiiiH pa (мощены на ко)пусе де|)жате. 1Я но (iirtiioie CToponi.i от овал|,ного отверстия 12. Индикатор 20 мс,ж(т б1)ГГЬ световым li виде .лампочки .либо вы.м .микрофоном.
0
5
0
5
0
5
0
5
5
Для (увеличения) повыщения точности определения момента соприкосновения с инородным метал 1ическим телом индикатор может быть снабжен на входе предвари- те.тьным усилителем и пороговым элементом (триггером Шмитта) с регулируемым уровнем порога. Кроме того, индикатор 20 может быть выполнен в виде наущника. В качестве источника 22 питания может быть использован аккумулятор Д -0,06, для слухового аппарата - очки СО-2.
Направитель 5 выполнен из латуни с наружным05 мм. Минимальный зазор между проводящими ланками 1 составляет 1 мм. Мри разведении лапок 1 путем перемещения цоколя к кольцу 6 зазор составляет 20 мм. С внутренней стороны лапки 1 имеют рифленую поверхность.
Изоляторы 4, 6 и 9 выполнены из фторопласта.
Провод 8 - одножильный, жесткий. Для удобства удержания большим пальцем держателя 10 его часть, содержащая овальное отверстие, может быть выполнена вра-, дающейся относительно продольной оси держателя.
Удлинение направителя 5 может быть обеспечено известным методом - насадкой дополнительных трубок. Лапки, направитель и держатель могут быть выполнены с эквивалентными элементами в щипцах ущных полипных. Для этого необходимо изолировать лапки у их основания, тягу по всей ее длине и ручки в месте их контакта. В качестве изолятора может быть использован фторопластовый . Соответственно, шарнир, соединяющий две ручки, и все крепления должны быть непроводимыми. Подключение индикатора и источника питания осуществляется по аналогии к двум проводящим изо.жрованным частям держателя. Электрический контакт образуется при замыкании лапок металлическим инородным телом.
Способ обнаружения осуществляют следующим образом.
Устанавливают в необходимое положение ограничительную гайку в соответствии с предполагаемым размером металлического инородного те;1а. Изменяют форму направителя 5 в зависимости от особенностей раневого канала. Стерилизованный напра- вите,-1ь 5 медленно перемещают по раневому каналу в разных направлениях, пока по появится звуковой (световой) сигнал, указывающий иа наличие непосредственного KOfiTaKTa металлического инородного тела с лапками 1 прибора. После появления звукового сигнала продвигают подвижную ручку II, добиваясь выдвижения лапок 1 №3 направителя 5. По индикатору 20 контроли- )г надежность захвата инородного металлического тела, особенно в тех случаях, когда инородное те.ю оказывается в труднодоступных местах. Захваченное инородное тело извлекают из раневого канала под контролем постоянного звукового сигнала. При этом извлечение тела осуществляется без дополнительного разреза тканей.
Способ позволяет ускорить извлечение металлических инородных тел из ран, что повышает производительность труда медперсонала при хирургической обработке больных.
Кроме того, применение прибора снижает травматичность в связи с отсутствием необходимости хирургического расширения канала.
6 Формула изобретения
Способ обнаружения инородных металлических тел в тканях живого организма с помощью зонда-искателя, электрически соединенного со звуковым сигналом и источником питания, отличающийся тем, что, с целью атравматичного извлечения обнаруженных тел, после обнаружения тело захватывают зондом-искателем, рабочая часть которого выполнена в виде mHnuoB-aaxBaj тов, яв 1яющихся звеньями электрической цепи, и извлекают при замкнутой электрической цепи.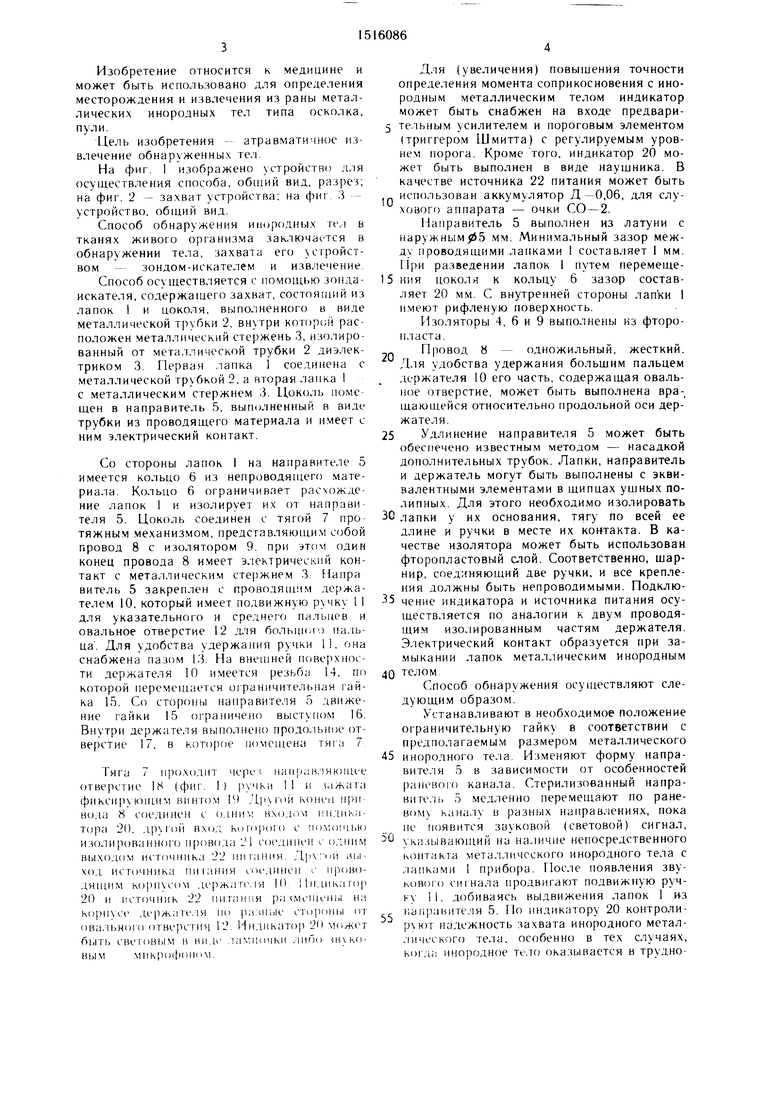
Изобретение относится к медицине и может быть использовано для определения местонахождения и извлечения из раны металлических инородных тел. С целью атравматичного извлечения обнаруженных тел, после обнаружения тело захватывают зондом-искателем и извлекают при замкнутой электрической цепи. 3 ил.
5
Фиг.г
;г 12
Фиг. 5
| Способ обнаружения инородных металлических тел в тканях человеческого организма | 1943 |
|
SU64090A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
