Извлечение инородных тел посредством щипцов через трубку эзофагоскопа является подчас довольно трудной манипуляцией вследствие того, что щипцы приходится вводить или через осветительную систему или возле нее в непосредственной близости глаза. Подобное положение щипцов сужает поле зрения и не всегда дает возможность направить щипцы прямо на инородное тело и захватить его. Это ведет к повторному накладыванию щипцов с излищней затратой сил и времени как для оператора, так и для пациента.
С целью устранения означенных недостатков в предлагаемом эзофагоскопе захватывающее приспособление, вводимое в трубку перед операцией, выполнено в виде двух пар передвижных пластинок, расположенных в пазах стенки корпуса эзофагоскопа и снабженных на нижнем конце захватывающими лапками. Для перемещения пластинок служат рычажки рукоятки, проходящей через прорез в верхней части трубки.
На чертеже фиг. 1 изображает схематически продольный разрез эзофагоскопа через захватывающую систему и фиг. 2-частичный продольный разрез его через прорез.
В стенке корпуса 3 эзофагоскопа расположены во всю длину его четыре продольных паза, попарно, друг против друга. В пазах могут скользить две пары пластинок /, 2. В нижних концах каждой пары пластинок, раздвоенных в виде вилки, поворотно установлены захватывающие лапки 4. У места скрепления пластинки 2 с лапкой последняя имеет по бокам зазоры, по которым скользят прилегающие к ним раздвоенные концы пластинки 2. Верхние концы обеих пар пластинок соединены с двумя металлическими кольцами 5, 6. Кольца расположены в трубке эзофагоскопа одно поверх другого и могут сближаться и раздвигаться npii посредстве соединенных с ними рычажков 7, 8 рукоятки 7(9, проходящих через прорез // в верхней части трубки.
При нажиме рукой на рычажок 7 рукоятки 10, соединенной с кольцом 5 и пластинками 7, он движет всю систему вверх или вниз, причем захватывающее приспособление может быть выведено вверх вовсе из трубки или же вниз из просвета трубки для захватывания инородного тела, но на расстояние, равное длине прореза 77 трубки. При движении рычажка 8
рукоятки Ю, соединенного с кольцом б и пластинками 2, последние движут за собой только прикрепленные к ним внизу захватывающие лапки 4, приводя их в вертикальное или же в горизонтальное положение до нужного их смыкания для захватывания инородного тела. Концы лапок могут быть острыми, плоскими, тупыми и т. п.
Предмет изобретения.
1. Эзофагоскоп с захватывающей системой, отличающийся тем, что
захватывающее приспособление состоит из двух пар пластинок /, 2, передвигаемых в пазах стенки корпуса эзофагоскопа при помощи рычажков 7 и 5 рукоятки Ю, проходящей через прорез в верхней части трубки, и снабженных на нижнем конце захватывающими лапками 4.
2. Форма выполнения эзофагоскопа по п. 1, отличающаяся тем, что рычажок 7 рукоятки 10 предназначен для передвижения всей захватывающей системы вверх и вниз, а рычажок 8 рукоятки /(9- -для перемещения захватывающих лапок 4.
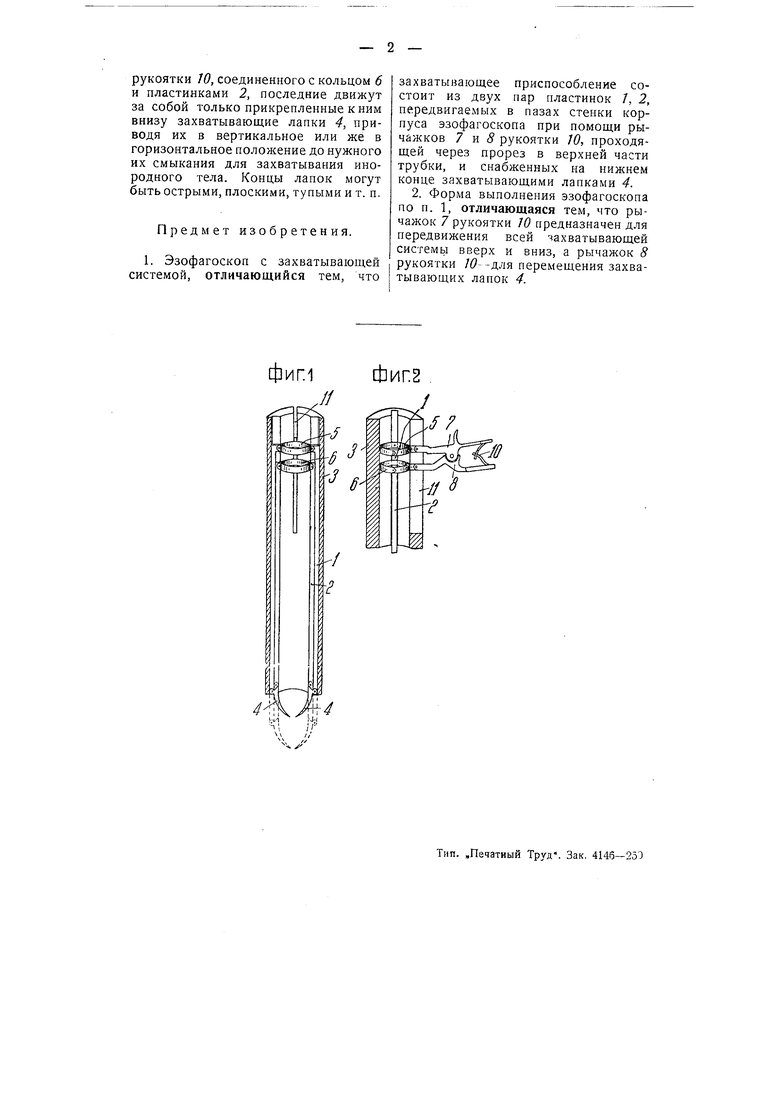
фиг.1
сЬиг.г
