Изобретение относится к автоматизации технологических процессов, а именно к устройствам автоматического управления положением инструмента в процессе термической резки и сварки, и может быть использовано для автоматической стабилизации по высоте положения резака над поверхностью изделия.
Цель изобретения - повышение надежности устройства в работе за счет автоматического запоминания устройством в начальный момент резки среднего значения уровня поверхности обрабатываемого металлического листа, автоматического контроля в процессе резки за положением резака относительно данного уровня, а также за
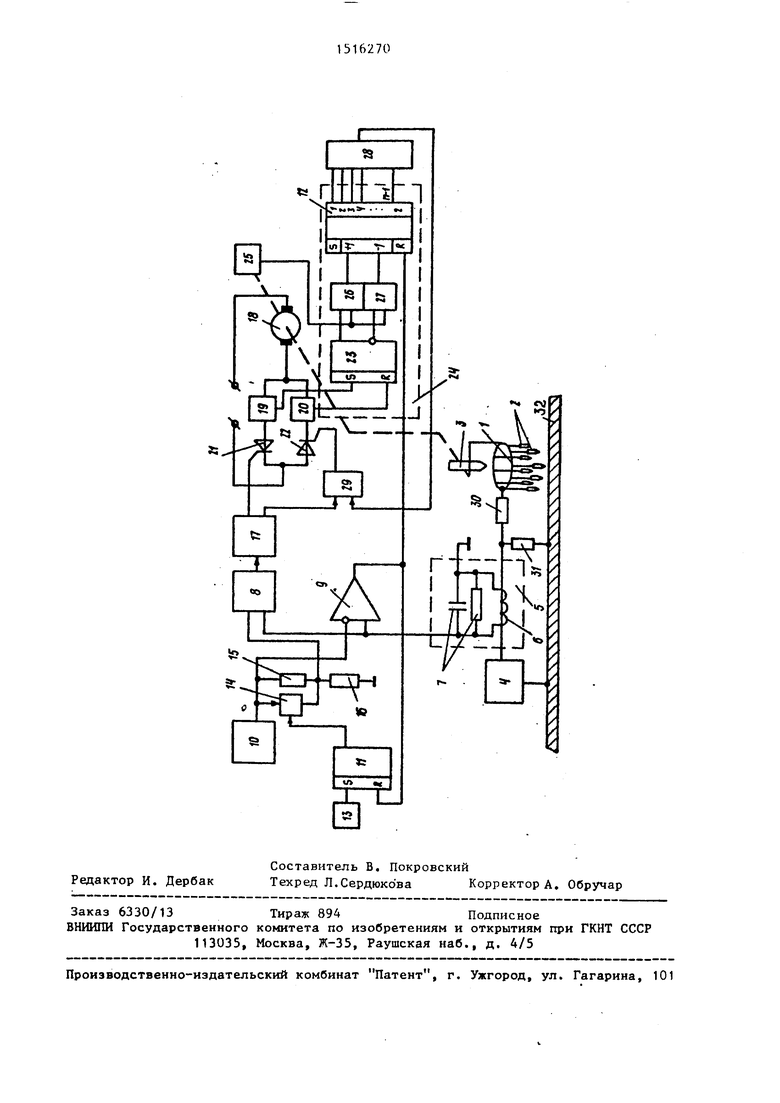
счет сорзершенствования конструкции электроискрового кольцевого датчика. На чертеже представлена функциональная схема устройства.
Устройство для стабилизации расстояния от резака до поверхности изделия содержит электроискровой кольцевой датчик 1 с расположенньгми равномерно по кольцу датчика гибкими электродами 2 одинако юй длины. Датчик жестко связан с резаком 3 и подключен к генератору А высоковольтных импульсов, разрядная цепь которого связана с входом преобразователя 5, .содержащего пояс Роговского 6 с ин- тегрирующей цепью 7, выход которой подключен к устройству 8 сравнения и прямому входу компаратора 9. Инверный вход последнего связан с источником 10 опорного напряжения, а выход - с R-входом RS-триггера 11 и входом установки нуля реверсивного счетчика 12.
Устройство также содержит одно- вибратор 13, подключенный своим выходом к S-входу RS-триггера 11, выход которого соединен с управляющим электродом аналогового коммутатора 14, соединенного выходными клеммами с резистором 15 делителя напряжения, образованного резисторами 15 и 16, средняя точка которого подключена к входу устройства 8 сравнения, соединенного выходом с усилителем 17 мощности .
Силовая электрическая цепь двигателя 18 содержит датчики 19 и 20 тока и силовые коммутаторы 21 и 22. Датчики 19 и 20 тока связаны, соответственно с S- и R-входами RS-триггера 23 логического счетного устройства 24. Двигатель 18 содержит на валу датчик 25 числа оборотов, выход которого соединен с входами элементо 26 и 27 логического умножении, соединенных Бькодагш с входами прямого и обратного счета реверсивного счетчика 12, выходы которого соединены с входами элемента 28 логического сложения, подключенного своим выходом к одному из входов элемента 29 логического умножения,второй вход которого соединен с выходом усилителя 17 мощности, а выход - с управляющим электродом силового коммутатора 22.
Кроме того, разрядная цепь генератора 4 высокошхпьтных импульсов содержит токоограничительный резистор
0
5
0
5
0
5
0
5
30. Устройство содержит разрядный резистор 31, включенный между разрядной цепью и обрабатываемым изделием 32.
В устройстве в качестве гибких электродов могут быть применены графитовые электроды, соединенные с гибкими и упругими проводниками.
Устройство работает следующим образом.
При включении устройства одновиб- ратор 13 вьфабатывает одиночный импульс, который устанавливает КЗ-триггер 11 в единичное состояние. Вследствие этого открывается аналоговый коммутатор 14, шунтирующий резистор 15 делителя напряжения, образованного резисторами 15 и 16. Следовательно, к одному из входов устройства 8 сравнения при1шядывается все напряже- iDie источника 10 опорного напряжения. Величина опорного напряжения соответствует значению напряжения, снимаемого с выхода преобразователя 5 при касании гибкими электродами 2 металлического изделия 32, т.е. пропорционального максимальному току в разрядной цепи, определяемому токоограничи- тельным резистором 30 и вызываемому импульсами генератора 4 высоковольтных импульсов. Так как при включении устройства кольцевой датчик 1 находится на сравнительно большом расстоянии от металлического изделия 32, п обы исключить возможное механическое повреждение резака 3 и кольцевого датчика 1 при установке новых необработанных металлическиУ. листов, ток в разрядной цепи генератора 4 высоковольтных импуль.сов минимальный и определяется сопротивлением разрядного резистора 31. Следовательно, напряжение на выходе преобразователя 5, представляющее собой интегральную величину, пропорциональную току в разрядной цепи, минимально и устройство 8 сравнения вырабатывает сигнал рас- согласоваршя на опускание резака, который вызывает выработку усилителем
17мощности сигнала, поступающего через элемент29 логического, умножения на управляющий электрод силового коммутатора 22, обеспечивающего протекание тока Б силовой цепи двигателя
18в таком направлении, при котором резак 3 опускается вниз.
При касании гибкими электродами 2 металлического изделия 32 величина
сигнала, снимаемог о с выхода преобразователя 5, сравнивается с величиной опорного напряжения, а следовательно сигнал рассогласования на выходе устройства 8 сравнения равен нулю и дви гатель 18 останавливается, а перемещение резака 3 вниз прекращается. Равенство значений сигналов, снимаемых с выходов преобразователя 5 и источника 10 опорного напряжения, поступающих на входы компаратора.9,вызывает его переключение. При этом на выходе компаратора 9 устанавливается напряжение положительного уровня, ко торов опрокидывает RS-триггер 11 в нулевое состояние и сбрасывает реверсивный счетчик 12 в нулевое состояние. Обнуление выхода RS-триггера 11 вызывает размыкание аналогового коммутатора 14 и включение в схему устройства резистора 15, При этом к одному из входов устройства 8 сравнения прикладывается только часть опорного напряжения, определяемая соотношением величин сопротивлений резисторов 15 и 16, образующих делитель напряжения.Соотношение величин сопротивлений резисторов 15 и 16 выбирают так, что напряжение, прикладываемое к входу устройства 8 срайнения от средней точки делителя напряжения соответствует величине напряжения, вырабатываемого преобразователем 5 при заданном номинальном расстоянии от резака 3 до поверхности металлического изделия 32.
Таким образом, после касания гибкими электродами 2 металлического изделия 32 и включения в схему установки резистора 15 на выходе устройства 8 сравнения вырабатывается сигнал рассогласования перемеще1 ия резака 3 вверх. Благодаря этому усилитель 17 мощности подает сигнал на управляющий электрод силового коммутатора 21, обеспечива1о1де1 о ц открытом состоянии протекание тока в силовой цепи двигателя 18 в таком направлении, при котором его вращение приводит к перемещению вверх резака 3. В дальнейшем процесс стабилизации расстояния от резака до поверхности изделия осуществляется следующим образом.
Изменение заданного расстояния вследствие неровности поверхности металлического изделия или друг их технологических воздействий вызывает
0
0
,
изменение величины тока разряда в цепи: генератор 4 высоковольтных импульсов, токоограничительный резистор 30, кольцевой датчик 1, гибкие электроды 2, металлическое изделие 32, генератор 4 высоковольтных импульсов. Пропорционально величине тока разряда изменяется величина напряжения на выходе преобразователя 5, а следовательно, на выходе устройства 8 сравнения появляется сигнал рассогласования соответствующего знака, который через усилитель 17 мощности управляет включением соответствующего силового коммутатора 21 либо силового коммутатора 22 в силовой электрической цепи двигателя 18, управляя тем самым .направлешшм ei-o врлщсмшя и нап- рахшением перемещения резака 3 по вертикали. В результате расстояние от резака 3 до поверхности металлического изделия 32 становится равным заданному, при котором сигнал рассог- 5 ласования на выходе устройства 8 сравнения равен нулю.
В процессе работы устройства в режиме стабилизации расстояния от резака 3 до ловерхности металлического изделия 32 на инверсный вход компаратора 9 постоянно поступает сигнал от источника 10 опорного напряжения, а на прямой вход - измеряюи1ИЙся пропорционально реальному расстоянию от резака 3 до поверхности металлического изделия 32 сигнал от преобразователя 5. Величина сигнала, поступающего на прямой вход компаратора 9, всегда меньше величины сигнала, поступающего на инверсный вход, значит на выходе компаратора 9 в процессе работы устройства присутствует постоянно низкий уровень напряжения. Это ис1шючает обнуление реверсивного счетчика 12 в процессе работы устройства и не влияет на состояние RS- триггера 11, управляющего работой аналогового коммутатора 14. Приводной двигатель 18 связан жесткой кинематической связью с резаком 3, следовательно, в зависимости от коэффициента передачи этой связи определенному числу оборотов приводного двигателя 18 соответствует строго определенная величина линейного перемещения резака 3 по вертикали.
Основой логического счетного устройства 24 является реверсивный счетчик 12. Выход датчика 25 числа оборо0
5
0
5
0
5
TOD двиг;1те;1н 18 коммутируется п зависимости от папраааения вращения -- двигателя 18 со входами прямого либо обратного счета роверсивного счетчика 12. Данная коммута1Ц1Я осуществляется RS-триггером 23 и двумя элементами 26 и 27 логического умножения, которые входят в состав логического счетного устройства 2А. Направление вращения двигателя 18 определяется направлением протекания тока в его силовой электрической цепи. Выбор направления протекания тока определяется открытым состоянием либо силового коммутатора 21, либо силового коммутатора 22. Падение напряжения на датчике 19 тока, находящегося в цепи силового коммутатора 21, соответствует одному направлению вращения двигателя 18, а падение напряжения на датчике 20 тока, находящегося в цепи силового коммутатора 22, соответствует противоположному направлению. Данная информация от датчиков тока 19 и 20 поступает на входы логического счетного устройства 24. На счетный вход устройства 24 поступает информа1щя о числе оборотов от датчика 25 числа оборотов приводного двигателя 18.
, Таким образом, при работе устройства на выходе реверсивного счетчика 12 в двоичном коде представлена информация о числе оборотов двигателт 18, которая изменяется в зависимости от изменения расстояния от резака 3 до поверхности металлического издели 32. Так как реверсивный счетчик 12 сбрасьюается в нулевое состояние сигналом от компаратора 9 только в начале работы устройства, то в процессе дальнейшей работы установки в режиме стабилизации расстояния информация н выходе реверсивного счетчика 12 от- лична от нуля, а следовательно, на выходе элемента 28 логического сложения присутствует логическая единица, которая обуславливает открытое состояние элемента 29 логического умножения, обеспечивающего пропускание,управляющего сигнала от усилителя 17 мощности к управляющему электроду силового коммутатора 22.
При попадании резака 3 в зону большого выреза или отверстия в металлическом изделии 32 величина тока в разрядной цепи генератора 4 высоковольтных импульсов минимальна и определяется сопротивлением разрядног о резистора 31 и устройство 8 сравнения вырабатывает сигнал рассогласования на сиинсение реэака 3. При достижении г ибкимИ электродами 2 среднего уровня поверхности металлического изделия 32 на в 1ходах реверсивного счетчика 12 присутствует нулевая информация,
так как отсчет числа оборотов двигателя 18 начат после обнуления выхода реверсивного счетчика 12 в начале работы устройства. На выходе элемента 28 логического сложения появляется
потенциал нулевого уровня, который обуславливает закрытое состояние элемента 29 логического умножения и непроникновение сигнала от усилителя 17 мощности на управляющий электрод
силового коммутатора 22, обеспечивающего протекание тока в силовой электрической цепи двигателя 18 в таком направлении, при котором привод работает в режиме снижение реэака 3. В
итоге снижение резака 3 прекращается и при дальнейшем перемещении резака 3 с кольцевым датчиком 1, например в автоматическом режиме в горизонтальной плоскости по заданной техно логической программе обработки металлического изделия 32, исключается их возможная механическая поломка об кромки металла.
5
0
5
0
5
I
Исключение нулевого состояния выходов реверсивного счетчика 12 во время опускания датчика в начальный момент работы может быть обеспечено подключением всех его входов параллельной загрузки к потенциалу высокого уровня.
Устройство обеспечивает повышение надежности и исключает краевой эффект за счет автоматического запоминания устройством в начальный момент резки среднего значения уровня поверхности обрабатываемого металлического изделия, за счет автоматического контроля и стабилизации в процессе резки положения резака относительно данного уровня, за счет совершенствования конструкции электроискрового кольцевания датчика, а также за счет вве- де1«я гальванической развязки в преобразователь, которая препятствует негативному распространению высокого уровня радиопомех по электрическим цепям установки, вызываемых работой генератора высоковольтных импульсов.
Формула изобретения
Устройство для стабилизации расстояния от резака до поверхности изделия, содержащее электроискровой кольцевой датчик, жестко связанный с резаком, подключенный к генератору высоковольтных импульсов преобразователь, выход которого связан с одним из входов устройства сравнения, выход которого соединен с усилителем мощности, двигатель, кинематически связанный с резаком и электроискровым датчиком, отличающее- с я тем, что, с целью повышения надежности работы, устройство дополнительно снабжено одновибратором, двумя триггерами, источником опорного напряжения, аналоговым коммутатором, компаратором, тремя элементами логического умножения, делителем напряжения, двумя силовьми коммутаторами с датчиками тока, реверсивным счетчиком, датчиком числа оборотов и эле- ментом логического сложения, при этом одновибратор подключен к S-входу первого триггера, R-вход которого, связанный с обнуляющим входом реверсивного счетчика, подключен к выходу компаратора, выход первого триггера связан с управляющим входом аналогового ключа, выход источника опорного напряжения подключен к входу аналогового ключа, делителю напряжения и ин
0
5
5 п
0
версному входу компаратора, выход аналогового ключа связан со средней точкой делителя напряжения и вторым входом устройства сравнения, прямой вход компаратора связан с выходом преобразователя, выход усилителя мощности связан с управляющей цепью первого силового коммутатора, связанного через первый датчик тока с двигателем, второй выход усилителя мощности через первый элемент логического умножения связан с управляющим входом второго силового коммутатора, подключенного к двигателю через второй датчик тока, второй вход первого элемента логического умножения связан с выходом элемента логического сложения, выходы датчиков тока связаны с входами второго триг Х ера, выходы которого соответственно через второй и третий элементы логического умноже- 1ШЯ связаны с суммирующим и вычитающим входами реверсивного счетчика, выходы которого связаны с входами элемента логического сложения, выход датчика числа оборотов подключен к вторым входам второго и третьего элементов л огического умножения, причем электроискровой кольцевой датчик выполнен из гибких расположенных по окружности электродов одинаковой длины, преобразователь содержит пояс Ро- говского с параллельно подключенной интегрирующей цепью.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для стабилизации расстояния от резака до поверхности металлического изделия | 1988 |
|
SU1696200A1 |
| Устройство для ультразвуковой сварки | 1988 |
|
SU1569146A1 |
| Устройство для ультразвуковой сварки | 1989 |
|
SU1673347A1 |
| Устройство для стабилизации расстояния от резака до поверхности металла | 1988 |
|
SU1620238A1 |
| Автоматический стабилизатор расстояния между плазмотроном и изделием | 1989 |
|
SU1676766A1 |
| Устройство для исследования электрохимических процессов | 1988 |
|
SU1589187A1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2006 |
|
RU2325620C2 |
| Устройство для электроискрового нанесения покрытий на металлическую ленту | 1987 |
|
SU1437171A1 |
| МНОГОТОЧЕЧНЫЙ СИГНАЛИЗАТОР УРОВНЯ (ЕГО ВАРИАНТЫ) | 1991 |
|
RU2025666C1 |
| КОММУТАТОР ДЛЯ УПРАВЛЕНИЯ ШАГОВЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2103716C1 |
Изобретение относится к автоматизации технологических процессов, в частности к устройствам автоматического управления положением инструмента в процессе термической резки или сварки. Цель изобретения - повышение надежности устройства в работе и исключение краевого эффекта при обработке металлических изделий сложной конфигурации. Устройство содержит электроискровой кольцевой датчик с гибкими электродами, жестко связанный с резаком и подключенный к генератору высоковольтных импульсов, и преобразователь, включающий пояс Роговского и интегратор. Преобразователь связан с устройством сравнения и компаратором. Имеется триггер, соединенный с одновибратором и аналоговым коммутатором, и логическое счетное устройство. Устройство содержит источник опорного напряжения, усилитель мощности и приводной двигатель с датчиком числа оборотов, а в силовой электрической цепи - два датчика тока. Выходы всех датчиков связаны с логическим счетным устройством. При включении устройства происходит автоматическое опускание резака до касания гибкими электродами металлического изделия. При этом обнуляется выход логического счетного устройства и запоминается значение среднего уровня поверхности металлического листа, ниже которого в дальнейшем резак опуститься не может. В процессе работы устройства стабилизации расстояния от резака до поверхности изделия осуществляется устройством сравнения. 1 ил.
| АВТОМАТИЧЕСКИЙ РЕГУЛЯТОР РАССТОЯНИЯ ОТ РЕЗАКА ДО ПОВЕРХНОСТИ ИЗДЕЛИЯ | 1971 |
|
SU421452A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
