Известны электромеханические регуляторы, предназначенные для управления технологическими процессами в свеклосахарном производстве, содержащие мостовую измерительную схему, регулирующий блок и исполнительный двигатель.
В отличие от известных устройств в предлагаемом регулирующий блок выполнен в виде вращающихся колец с установленной между ними перемычкой и снабженных щетками, включенными в цепь магнитного пускателя, а в мостовую схему включено реле, отключающее исполнительный двигатель при отсутствии напряжения разбаланса на выходе мостовой схемы. Эти отличия обеспечивают повышение точности регулирования и снижение мощности, потребляемой регулятором.
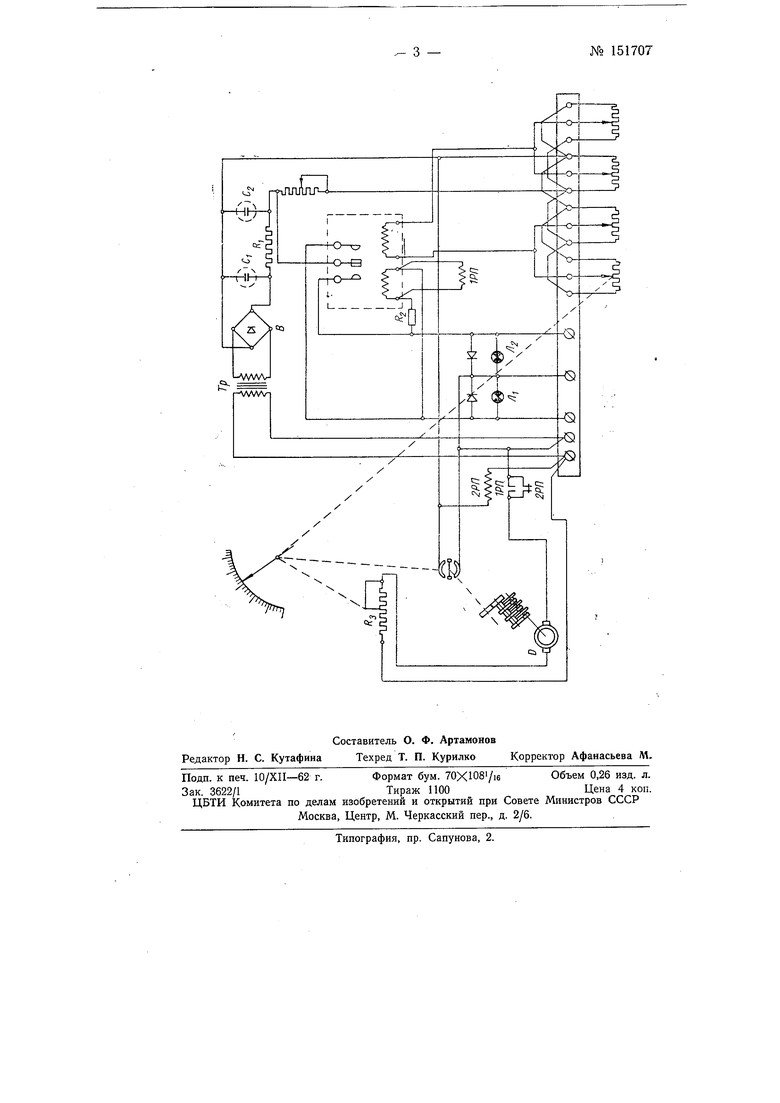
На чертеже представлена принципиальная схема электромеханического регулятора, выполненного конструктивно в виде двух блоков, измерительного и регулирующего.
Измерительный блок включает мостовую измерительную схему с нуль-индикатором, образованную реостатным датчиком, механически связанным с показывающей стрелкой прибора и ручным задатчиком. В мостовую измерительную схему включены также ручной корректор и датчик обратной связи, устанавливаемый на исполнительном органе. В качестве нуль-индикатора в диагональ мостовой схемы включено поляризованное реле.
Регулятор работает следующим образом: в процессе измерения, в результате отклонения регулируемого параметра от нормы, стрелка измерительного прибора перемещается и перемещает ползун реостатного датчика. При этом нарушается баланс моста и срабатывает поляризованное реле. Электропитание мостовой схемы осуществляется
№ 151707
от выпрямителя В, снабженного П-образным фильтром, образованным сопротивлением Ri и конденсаторами Cj и Cg. Поляризованное реле замыкает цепь питания электролампочек Л и Л и однозременно подает электропитание на одну из катушек реверсивного магнитного пускателя (на чертеже не показан). Одновременно через нагрузочное сопротивление Rz включается удерживающая обмотка поляризованного реле. Для установки той или иной нечувствительности регулятора в цепь источника питания включено переменное сопротивление «нечувствительности. При изменении величины указанного сопротивления изменяется напряжение питания мостовой измерительной схемы и, соответственно, изменяется ее чувствительность. Регулирующий блок включает контактные полукольца, механический вариатор, асинхронный электродвигатель D, электромагнитные реле 1РП, 2РП и регулируемое сопротивление Ra- Контактные полукольца приводятся во вращение электродвигателем через механический вариатор. Электрические контактные полукольца включены в цепь питания магнитного .пускателя. Контакт с полукольцом осуществляется с помощью двух токосъемных щеток, из которых одна неподвижна, а другая механически связана со стрелкой измерительного прибора и перемещается вместе с ней, скользя по разным полукольцам. При отклонении стрелки обе щетки скользят по одному полукольцу, при этом на магнитный пускатель поступает напряжение питания. Длительность и частота включения магнитного пускателя зависят от степени отклонения регулируемого параметра от нормы, причем эта зависимость непрерывна и линейна ввиду применения вариатора и переменного сопротивления, включенного в цепь асинхронного однофазного электродвигателя. Для уменьщения инерционности регулятора и улучшения энергетического режима его работы в схему включены электромагнитные реле 1РП и 2РП.
Предмет изобретения
Электромеханический регулятор, например, для управления технологическими процессами в свеклосахарном производстве, содержащий мостовую измерительную схему, регулирующий блок и исполнительный двигатель, отличающийся тем, что, с целью повышения точности регулирования и снижения мощности, потребляемой регулятором, в нем регулирующий блок выполнен в виде вращающихся колец с установленной между ними перемычкой и снабженных щетками, включенными в цепь магнитного пускателя, а в мостовую схему включено реле, отключающее исполнительный двигатель при отсутствии напряжения разбаланса на выходе мостовой схемы.