Изобретение относится к области гравиметрии, в частности бортовым измерителям вторых производных гравитационного потенциала, например к измерителю тензора вторых производных.
Цель изобретения повышение точности и надежности измерений.
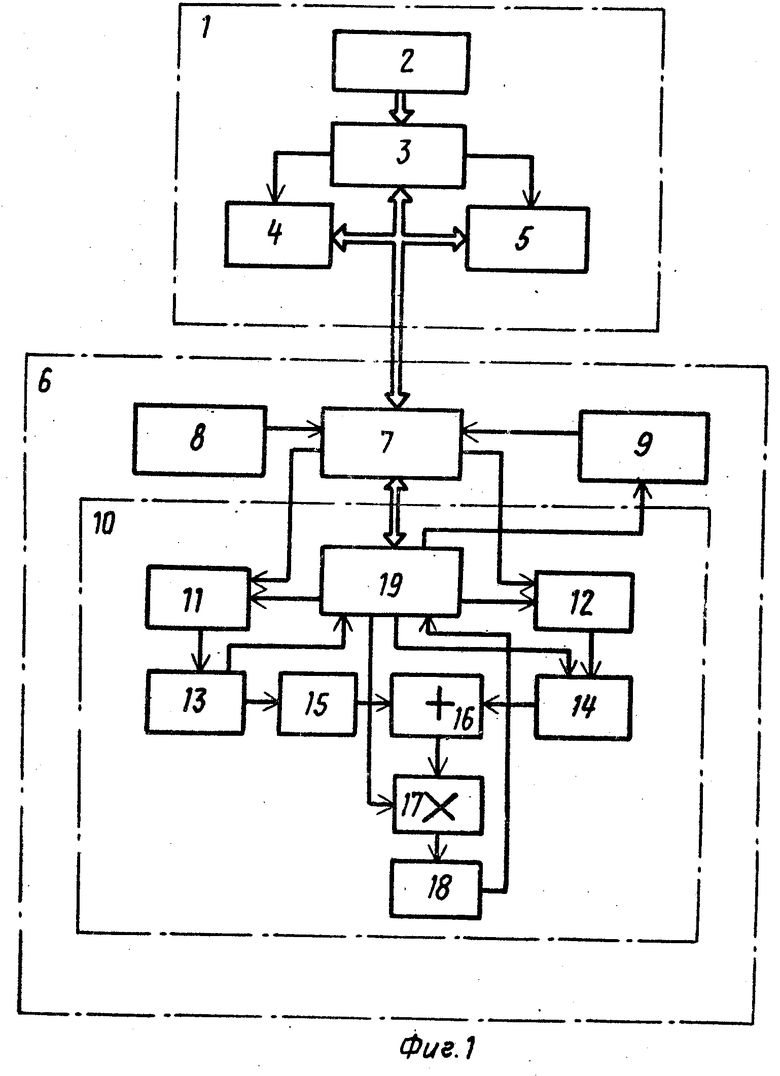
На фиг. 1 представлена блок-схема устройства, реализующего предлагаемый способ отладки гравитационного градиентометра, включающего четыре цикла процедуры отладки; на фиг. 2-7 представлены функциональные схемы основных блоков цифровой вычислительной машины и связи между ними; на фиг. 8 приведены основные функциональные элементы блоков ЦВМ-10 с обозначением соответствующих вычислительных операций.
Способ отладки бортового гравитационного градиентометра заключается в следующем. На неподвижном бортовом носителе (объекте типа наземного или другого транспортного средства) устанавливают на одной гиростабилизированной платформе гравитационный градиентометр (типа ротационных бортовых гравитационных градиентометров или других) и блок трех одноосных акселерометров. Чувствительные оси акселерометров. Чувствительные оси акселерометров ориентируют параллельно гироплатформенной системе координат. Включают питание и выставляют гиростабилизированную платформу по азимуту и в горизонте по сигналам гироскопов и акселерометров. Измеряют направление гравитационной вертикали по синхронным во времени сигналам градиентометра и акселерометров. Сравнивают между собой сигналы, пропорциональные измеренным направлениям гравитационной вертикали. Разность этих сигналов запоминают в ЦВМ в виде вектора измерений вертикальных направлений, который обрабатывают в ЦВМ с учетом времени измерений и углов поворота гиростабилизированной платформы и бортового носителя. Определяют в конце каждой операции и всей процедуры отладки бортового гравитационного градиентометра поправки, пропорциональные сигналам компенсации за влияние дрейфа нуля, гравитационных помех и систематических дестабилизирующих факторов, по всем шести каналам выходного полезного сигнала.
Согласно изобретению, способ отладки бортового и гравитационного градиентометра может быть осуществлен с помощью устройства (фиг. 1), содержащего: блок измерителей (БИ) 1, включающий бортовой носитель (БН) 2, например типа автомобильного и железнодорожного транспортного средства, и др. гиростабилизированную платформу (ГСП) 3, на которой размещены: блок трех одноосных акселерометров (БА) 4 и бортовой гравитационный градиентометр (БГГ) 5, измеряющий тензор вторых производных гравитационного потенциала. Блок измерителей 1 связан дуплексной связью с блоком формирования измерений (БФИ) 6, который содержит: блок управления (БУ) 7, связанный с таймером 8, потребителем выходного полезного сигнала (Твых,п/с) 9 градиентометра, например типа инерциальной геодезической системы и др. а также с ЦВМ 10. Она включает: блок обработки сигналов акселерометров (БОСА) 11, блок обработки сигналов гравитационного градиентометра (БОСГ) 12, блок нормировки (БНР1) 13, блок определения собственного вектора (БОСВ) 14 тензора вторых производных гравитационного потенциала, инвертор (-1) 15, сумматор (+) 16, умножитель (х) 17, аналого-цифровой индикатор (АЦH) 18 выходного полезного сигнала градиентометра и запоминающее устройство (ЗУ) 19 цифровой вычислительной машины. При этом блок управления 7 связан первым выходом с первым выходом блока обработки сигналов акселерометров 11, вторым выходом с входом запоминающего устройства 19 и третьим выходом с первым входом блока обработки сигналов градиентометра 12. Первый выход запоминающего устройства 19 связан с вторым входом БОСА 11, второй выход ЗУ 19 связан с входом умножителя 17, третий выход ЗУ 19 с вторым входом БОСГ 12, четвертый выход ЗУ 19 с вторым входом потребителя 9 выходного полезного сигнала градиентометра. Выход блока обработки сигналов акселерометров 11 последовательно связан через блоки 13, 15,16, 17, 18 с вторым входом ЗУ 19. Выход блока 12 последовательно связан через блоки 14, 16, 17, 18 с вторым входом ЗУ 19. Кроме того, второй выход БНР1 13 связан с третьим входом ЗУ 19, второй выход БОСВ 14 связан с четвертым входом ЗУ 19.
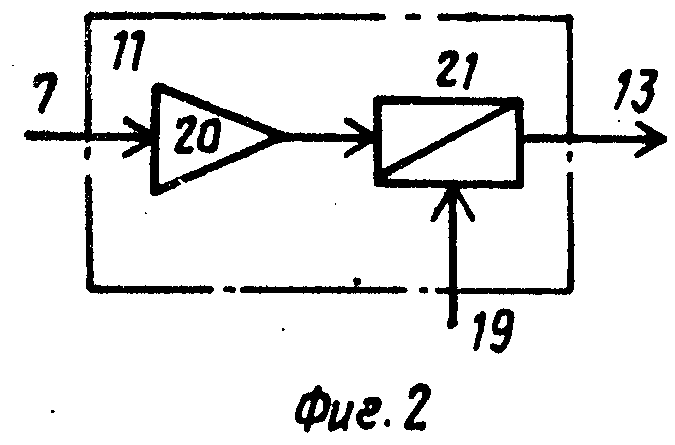
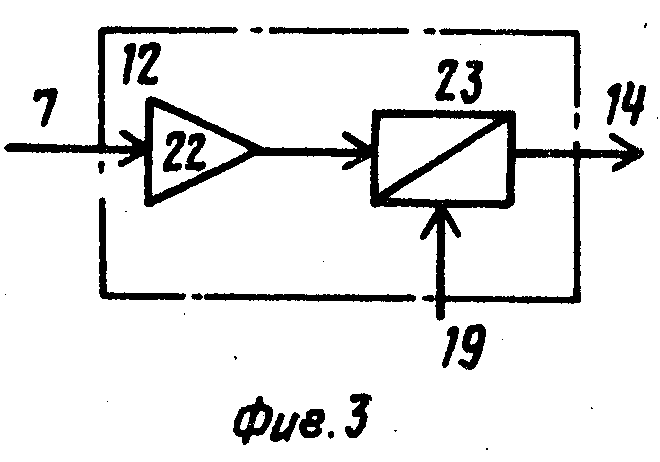
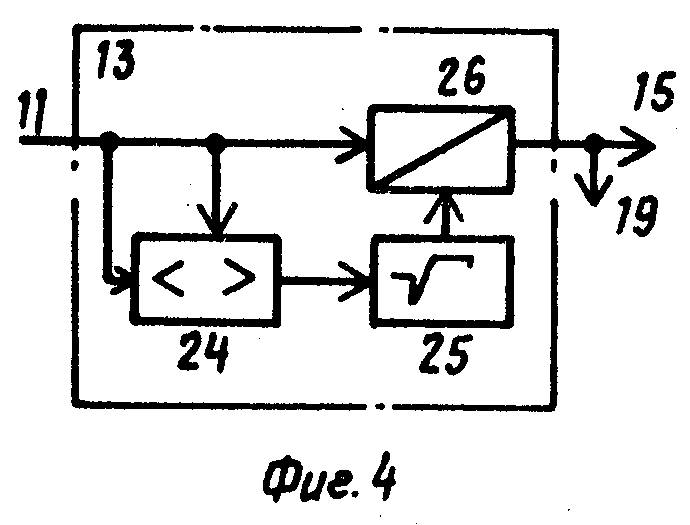
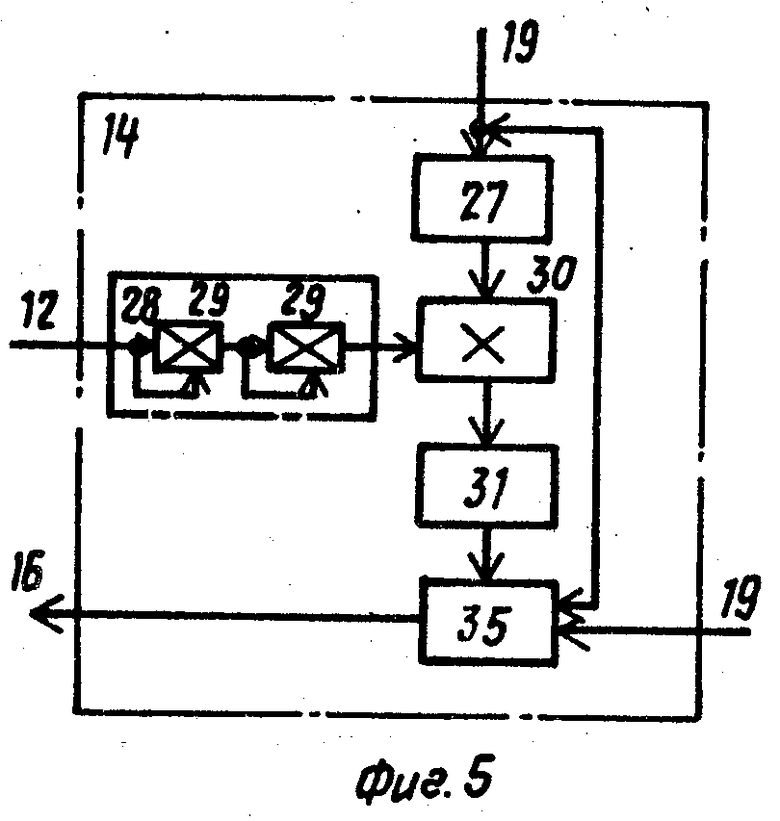
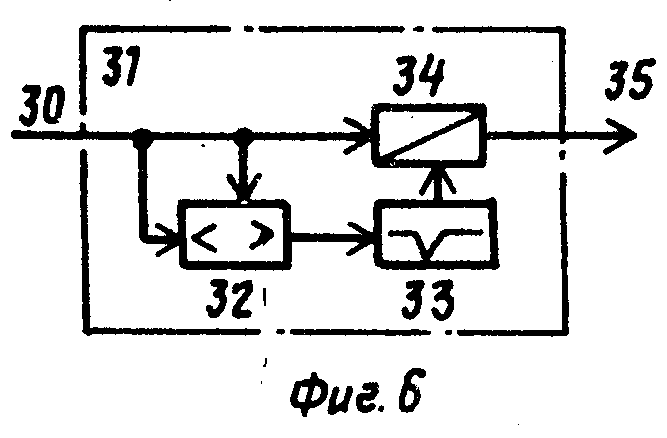
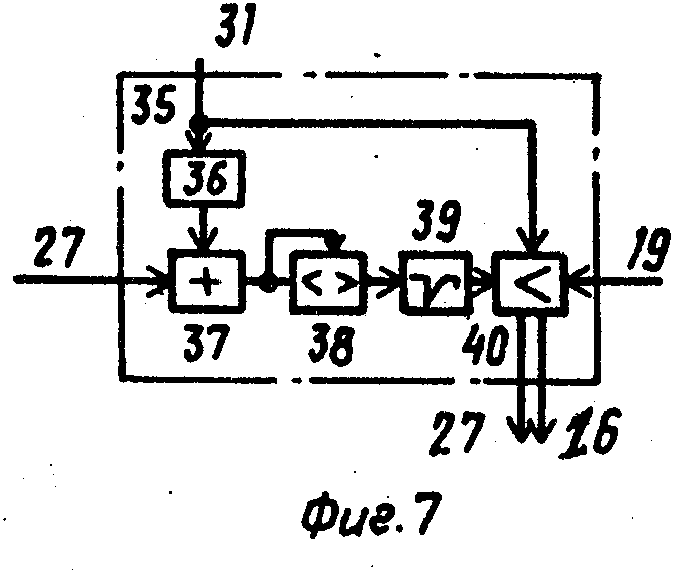
На фиг. 2-7 показаны отдельные функциональные блоки ЦВМ 10 и связи между ними. Блок обработки сигналов акселерометров (фиг. 2) 11 включает последовательно соединенные интегратор 20 и делитель 21. Блок (фиг. 3) 12 включает последовательно соединенные интегратор 22 и делитель 23. Блок нормировки первый (фиг. 4) (БНР1) 13 содержит параллельно-последовательно соединенные оператор скалярного произведения 24, вычислитель ("извлекатор") 25 и делитель 26. БОСВ 14 (фиг. 5) включает последовательно соединенные оператор записи векторного сигнала 27, блок 28, выполненный в виде умножителей ("квадраторов") 29, умножитель тензора на вектор 30, блок нормировки второй (фиг. 6) (БНР2) 31, который содержит параллельно-последовательно соединенные оператор скалярного произведения 32, вычислитель ("извлекатор") 33 и делитель 34; блок сравнения (фиг. 7) (БС) 35, включающий параллельно-последовательно включенные инвектор 36, сумматор 37, оператор скалярного произведения 38, вычислитель ("извлекатор") 39 и переключатель 40 сигналов градиентометра.
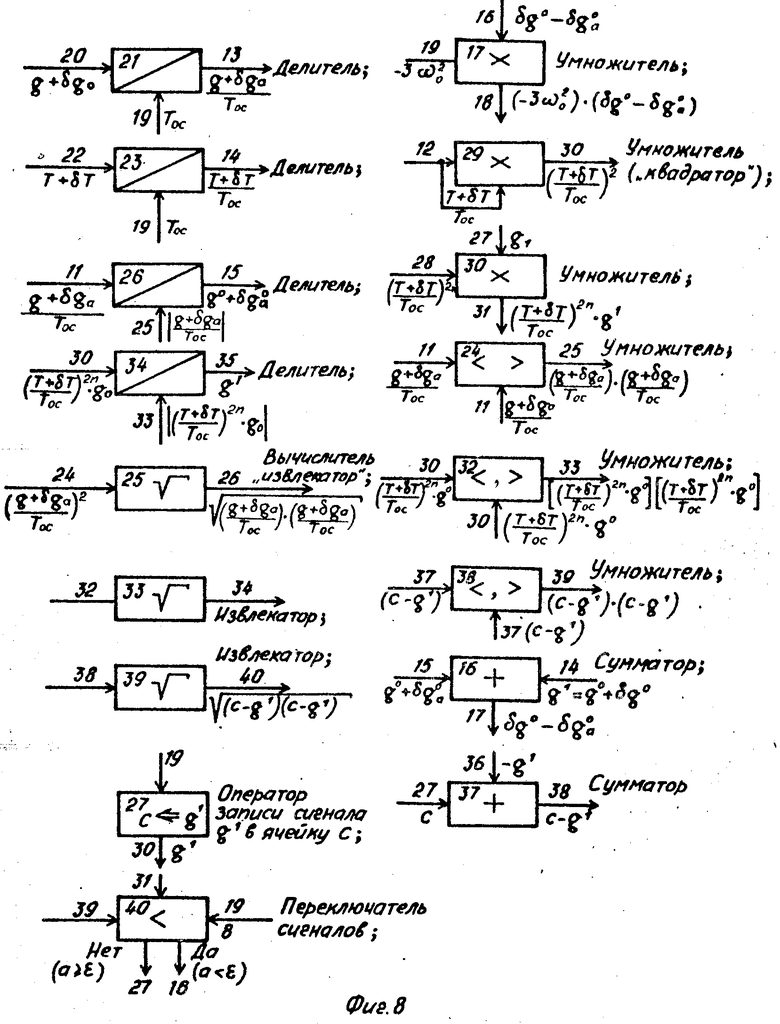
На фиг. 8 приведены основные функциональные элементы блоков ЦВМ 10 с обозначением соответствующих вычислительных операций и потоков сигналов: делители 21, 23, 26, 34; умножители: 24, 32, 38, 17, 29, 30; вычислители ("извлекаторы"): 25, 33, 39, сумматор 37, оператор записи векторного сигнала 27 и переключатель 40 сигналов градиентометра.
Работу устройства (фиг. 1), реализующего предлагаемый способ отладки бортового гравитационного градиентометра, проиллюстрируем на примере осуществления процедуры отладки, включающей четыре цикла, которые выполняются в блоке формирования измерений 6 по командам блока управления 7 под контролем программируемого таймера 8.
1. Первый цикл процедуры отладки гравитационного градиентометра по определению поправок за влияния дрейфа нуля включает следующие операции:
1.1. горизонтирования и выставки ГСП-3 бортового носителя 2 блока измерителей 1, которую осуществляют методом гирокомпасирования с использованием сигналов акселерометров и гироскопов;
1.2. измерений и запоминания в ЗУ 19 ЦВМ 10 значений начальных углов αо, βо, γо ориентации БН 2 относительно платформенной системы координат ГСП 3;
1.3. синхронных по времени измерений в блоке акселерометров 4 и блоке гравитационного градиентометра 5 в момент времени t1 с временем осреднения Тос (несколько секунд), компенсирующим случайные и высокочастотные ошибки измерений акселерометров и градиентометра. При этом сигналы от блока акселерометров 4 последовательно пускают (см. фиг. 1) через блоки 7, 11, 13, 15 и подают на сумматор 16, на второй вход которого подают сигналы от БГГ 5 через блоки 7, 12, 14, а выходные сигналы сумматора 16 подают через блоки 17, 18 и запоминают в ЗУ 19, в функции времени измерений;
1.4. аналогичную 1.3 выполняют в момент времени t2 с заданным таймером 8 интервалом времени
Δt t2 t1;
1.5. определения в ЦВМ 10 величины дрейфа градиентометра 5 по двум каналам его полезного сигнала (Т13 и Т23).
Результаты определения дрейфов D1 и D2 градиентометра фиксируют в ЗУ 19. На этом цикл 1 процедуры отладки БГГ завершают.
2. Второй цикл процедуры отладки гравитационного градиентометра по определению поправок, обусловленных гравитационными помехами от масс бортового носителя, включает следующие операции:
2.1. поворота бортового носителя 2 в заданном диапазоне углов относительно ГСП 3 (платформенной системы координат), которую выполняют по командам таймера 8;
2.2. горизонтирования и выставки ГСП 3, которая включает по командам таймера 8 вышеуказанные действия (см. операцию 1.1);
2.3 измерения и запоминания в ЗУ 19 для соответствующего момента времени tj значений углов αj, βj, γj (j 3, 4, n, где n≥6) поворота бортового носителя 2 относительно ГСП-3;
2.4 синхронных по времени измерений в блоке акселерометров 4 и блоке гравитационного градиентометра 5 в момент времени tj с временем осреднения Тос. При этом сигналы от блока акселерометров 4 последовательно пропускают (см. фиг. 1) через блоки 7, 11, 13, 15 и подают на сумматор 16, на второй вход которого подают сигналы от БГГ 5 через блоки 7, 12, 14, а выходные сигналы сумматора 16 подают через блоки 17, 18 и запоминают в ЗУ 19 в функции времени измерений.
Операции 2,1-2,4 выполняют для значений j 3, 4, 5,n, где n≥6.
2.5 определения в ЦВМ 10 величин гравитационных помех.
Результаты определения поправок ΔТк фиксируют в ЗУ 19.
2.6 по определению поправок от перераспределения масс бортового носителя, например вследствие изменения уровня топлива в баках, изменения конфигурации объекта, т. е. обусловленных изменением контролируемых переменных, определяющих состояние масс в бортовом носителе и их изменчивость (величина уровня жидкости) в баках, интервал перемещения массы, угол отклонения штанг с массами и т. д.). При этом осуществляют операции 1-5 цикла 2 по командам таймера 8 для заданных значений контролируемых переменных. В ре- зультате получают поправки  K=1, 6 как функции указанных контролируемых переменных и фиксируют значения этих параметров в ЗУ 19. На этом цикл 2 процедуры отладки БГГ заканчивается.
K=1, 6 как функции указанных контролируемых переменных и фиксируют значения этих параметров в ЗУ 19. На этом цикл 2 процедуры отладки БГГ заканчивается.
3. Третий цикл процедуры отладки гравитационного градиентометра по определению поправок за влияние систематических дестабилизирующих факторов использует результаты синхронных измерений, проведенных в предыдущих циклах 1 и 2 отладки в блоке акселерометров 4 и блоке гравитационного градиентометра 5, а также полученные в ЦВМ 10 значения дрейфов и гравитационных помех.
Результаты определения поправок Δi(i 1, 2) фиксируют в ЗУ 19. На этом цикл 3 процедуры отладки БГГ завершается.
В результате выполнения вышеуказанных циклов процедуры отладки получают поправки градиентометрических наблюдений (дрейф и систематический фактор) по двум каналам, соответствующим градиентам Т13 и Т23 и одновременно определяют величины гравитационных помех для всех 6 каналов градиентометра 5.
4. Четвертый цикл процедуры отладки гравитационного градиентометра по определению дрейфов и систематических факторов для остальных каналов градиентометра заключается в следующем. Нужно повторить операции 2-5 первого цикла и цикл третий процедуры отладки градиентометра. При этом как в цикле 2 изменяют углы ориентации ГСП 3 относительно неподвижного БН 2 (т. е. величины, обозначенные в операции 2 цикла 1 через αо, βо, γо) с установленными на ней блоками акселерометров 4 и градиентометром 5, например на фиксированную величину 5о-6о или 90о (в зависимости от конструктивного исполнения бортового гравитационного градиентометра). Результаты определения поправок Di и Δi (i 3, 4, 5, 6) фиксируют в ЗУ 19. На этом цикл 4 процедуры отладки БГГ заканчивается.
В результате выполнения циклов 1-4 процедуры отладки БГГ в ЗУ 19 хранятся три основных типа поправок по каждому из шести каналов выходного полезного сигнала гравитационного градиентометра. В рабочем режиме измерений градиентометра 5 из его выходного сигнала по каждому из шести каналов в БУ 7 вычитают сигналы, пропорциональные полученным поправкам, хранящимся в ЗУ 19, и затем подают к потребителю полезного сигнала градиентометра 9, например в инерциальную геодезическую систему и др.
Точность определения поправок в предлагаемом способе обеспечивается в пределах 0,4-0,8Е.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОТЛАДКИ БОРТОВОГО ГРАВИТАЦИОННОГО ГРАДИЕНТОМЕТРА | 1989 |
|
SU1823661A1 |
| Способ автономной навигации для объекта космического назначения | 2018 |
|
RU2727784C2 |
| АВТОНОМНЫЙ КОМПЛЕКС ДЛЯ КОРРЕКЦИИ ИНЕРЦИАЛЬНЫХ СИСТЕМ ПЛАТФОРМЕННОЙ ОРИЕНТАЦИИ И НАВИГАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2022 |
|
RU2826826C2 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 1990 |
|
RU2016383C1 |
| СПОСОБ НАЧАЛЬНОЙ ВЫСТАВКИ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2002 |
|
RU2215994C1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ НАВЕДЕНИЯ ДОВОДОЧНЫХ СТУПЕНЕЙ РАЗЛИЧНОГО НАЗНАЧЕНИЯ | 2010 |
|
RU2440557C9 |
| ГРАВИМЕТРИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ УКЛОНЕНИЯ ОТВЕСНОЙ ЛИНИИ В ОКЕАНЕ НА ПОДВИЖНОМ ОБЪЕКТЕ | 2007 |
|
RU2348009C1 |
| ГРАВИМЕТР ДЛЯ ИЗМЕРЕНИЯ СИЛЫ ТЯЖЕСТИ С ДВИЖУЩИХСЯ СУХОПУТНЫХ НОСИТЕЛЕЙ В РЕЖИМЕ КРАТКОВРЕМЕННЫХ ОСТАНОВОК | 1993 |
|
RU2056641C1 |
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ С КОМПЛЕКСНЫМ НАВИГАЦИОННЫМ УСТРОЙСТВОМ | 1994 |
|
RU2046736C1 |
| КОМБИНИРОВАННАЯ БЕСПЛАТФОРМЕННАЯ АСТРОИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2017 |
|
RU2654965C1 |
Изобретение относится к гравиметрии вторых производных гравитационного потенциала. Цель состоит в повышении точности и надежности измерений. Для этого определяются дрейф нуль-пункта, поправки, позволяющие исключить поле вторых производных от масс бортового носителя, поправки на влияние систематических дестабилизирующих факторов. Положительный эффект достигается за счет исключения указанных помех. 8 ил.
СПОСОБ ОТЛАДКИ БОРТОВОГО ГРАВИТАЦИОННОГО ГРАДИЕНТОМЕТРА, включающий поворачивание его чувствительной системы в вертикальной и горизонтальной плоскостях, определение методических и инструментальных погрешностей выходного сигнала и введение в него соответствующих поправок, отличающийся тем, что, с целью повышения точности и надежности измерений, гравитационный градиентометр устанавливают на гиростабилизированной платформе неподвижного бортового носителя совместно с блоком трех одноосных акселерометров, оси чувствительности которых ориентируют параллельно осям платформенной системы координат, включают питание, выставляют гиростабилизированную платформу по азимуту и в горизонте по сигналам гироскопов и акселерометров измеряют и запоминают значения начальных углов ориентации бортового носителя относительно платформенной системы координат, измеряют направления гравитационной вертикали по синхронным во времени сигналам градиентометра и акселерометров, сравнивают между собой сигналы, пропорциональные измеренным направлениям гравитационной вертикали, разность этих сигналов обрабатывают и запоминают, как функции дрейфа нуля и времени измерений градиентометра по двум каналам выходного полезного сигнала, поворачивают гиростабилизированную платформу на заданные углы относительно неподвижного бортового носителя, измеряют и запоминают, как функции времени, значения углов поворота платформы относительно неподвижного бортового носителя, для каждого значения углов поворота платформы измеряют направления гравитационной вертикали по синхронным по времени сигналам градиентометра и акселерометров, сравнивают между собой сигналы, пропорциональные измеренным направлениям гравитационной вертикали, разность этих сигналов обрабатывают и запоминают, как функции дрейфа нуля и времени измерений градиентометра по четырем каналам выходного полезного сигнала, поворачивают бортовой носитель на заданные углы относительно начально выставленной платформенной системы координат, измеряют и запоминают, как функции времени, значения углов поворота бортового носителя относительно выставленной платформы, для каждого значения углов поворота носителя измеряют направления гравитационной вертикали по синхронным во времени сигналам градиентометра и акселерометров, сравнивают между собой сигналы, пропорциональные измеренным направлениям гравитационной вертикали, по разностям этих сигналов, соответствующим разным значениям углов поворота бортового носителя, определяют, например, методом наименьших квадратов, значения гравитационных помех, запоминают сигналы, пропорциональные полученным значениям гравитационных помех, как функции углов поворота бортового носителя и времени измерений градиентометра по шести каналам выходного полезного сигнала, складывают запомненные сигналы, пропорциональные дрейфам нуля и значениям гравитационных помех, по каждому из шести каналов выходного полезного сигнала, вычитают полученные сигналы из сигналов, пропорциональных соответствующим разностям измеренных направлений гравитационной вертикали, разность этих сигналов запоминают как функции систематических дестабилизирующих факторов и времени измерений градиентометра по шести каналам выходного полезного сигнала.
| 0 |
|
SU195198A1 | |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
