Изобретение относится к области бортового приборостроения и автоматики, может быть использовано для решения задач автономной ориентации и навигации наземных и подземных, надводных и подводных, летательных и баллистических, внутритрубных и космических аппаратов.
Для решения задач управления различными подвижными объектами (ПО) в околоземном пространстве на практике используют различные системы ориентации и навигации (СОН): платформенные и бесплатформенные, автономные и корректируемые, инерциальные и спутниковые, астрономические и радиотехнические и др. [1-4].
Как известно, любая СОН в первую очередь решает задачу построения на борту ПО неподвижной системы координат-отсчетного базиса- физическим путем с помощью систем платформенной инерциальной ориентации и навигации (ПИОН) или математическим путем с помощью систем бесплатформенной инерциальной ориентации и навигации (БИОН) [1-4]. Относительно такого отсчетного базиса, воспроизводимого физическим или математическим путем, в дальнейшем решают задачи ориентации и навигации ПО с выбором соответствующих параметров по соответствующим приемам обработки информации. От точности решения задачи построения на борту ПО отсчетного базиса (физического или математического) зависит и точность решения последующих задач - ориентации и навигации объектов.
С середины XX столетия на практике появились первые платформенные инерциальные системы ориентации и навигации (ПИОН), в которых неподвижный отсчетный базис воспроизводили физическим путем с помощью гиростабилизированной платформы (ГСП), подвешенной в одной точке с помощью карданного подвеса трехосного гиростабилизатора (ТГС). Канал автономной навигации в таких системах ПИОН выполняли на основе обработки инерциальной информации от трехосных блоков акселерометров (ТБА), устанавливаемых на ГСП, по интегральным приемам. Канал же автономной ориентации ПО реализовывали на основе обработки информации, формируемой с помощью датчиков команд (ДК), устанавливаемых по осям стабилизации ГСП.
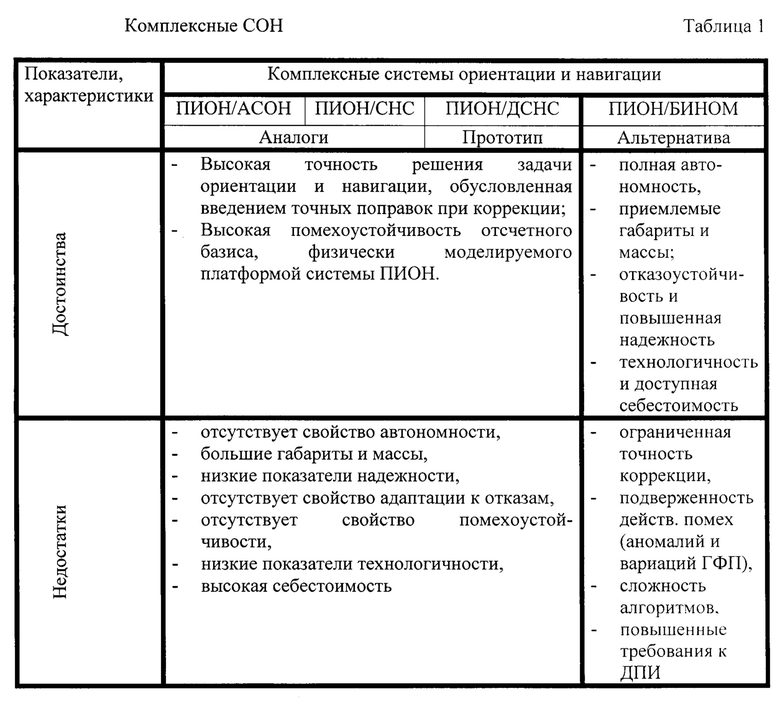
Для устранения основного недостатка системы ПИОН, связанного с уходом ГСП, обусловленного дрейфом гироскопов и процессом интегрирования во времени ошибок в их сигналах, во второй половине XX столетия появились интегрированные СОН, построенные на основе комплексирования систем платформенной инерциальной ориентации и навигации (ПИОН) с другими системами (табл. 1):
- радиотехническими,
- астрономическими,
- спутниковыми и др.
Такие интегрированные СОН построены на основе использования принципов комплексирования, функциональной избыточности информации и коррекции систем ПИОН. В соответствии с этими принципами обеспечивают предпосылки для расширения первичной приборной информации (ППИ), а также достигают условия, при которых достоинства одной подсистемы, входящей в комплекс, компенсируют соответствующие недостатки другой подсистемы. В частности, основной недостаток систем ПИОН (низкая точность из-за проявления свойства накопления во времени погрешностей) компенсируют высокой точностью других систем, выполняющих роль корректирующих систем.
Указанные в табл. 1 достоинства и недостатки комплексных СОН являются общими для аналогов и прототипа, однако для разных систем они проявляются в разной степени и в разных соотношениях.
Известны интегрированные СОН, построенные на основе объединения в один измерительно-вычислительный комплекс (ИВК) систем ПИОН и астрономических СОН [5-6] (табл. 1). Из всех недостатков, интегрированных СОН ПИОН/АСОН, указанных в табл. 1, следует особо выделить недостаток, связанный с отсутствием у них свойства помехоустойчивости и обусловленный необходимостью наблюдения за астрономическими объектами (звездами, Солнцем, Луной и планетами) в оптическом диапазоне в пределах видимости.
Дальнейшие работы по совершенствованию инерциально-астрономических СОН с целью устранения отмеченных недостатков привели разработчиков систем к созданию интегрированных инерциально-спутниковых систем ПИОН/СНС (табл. 1) [7].
Известны интегрированные СОН, основанные на объединении систем ПИОН и спутниковых навигационных систем (СНС) в один комплекс [7]. Объединение подсистем в один ИВК выполняют на основе аппаратного расширения и использования приемов совместной обработки в вычислителе расширенной ППИ. При этом выявленные ошибки в решении задачи автономной навигации с помощью системы ПИОН компенсируют (непрерывно или дискретно) с помощью поправок, формируемых по сигналам СНС.
ИВК ПИОН/СНС может работать в двух режимах: автономном и корректируемом. Наряду с общими недостатками, указанными в табл. 1, следует отметить специфическийнедостаток, присущий только СНС. Этот недостаток заключается в невозможности выполнения операций коррекции системы ПИОН по каналу ориентации с помощью СНС.
Известны интегрированные СОН, основанные на объединении в одном ИВК систем ПИОН и дифференциальных спутниковых навигационных систем (ДСНС). Особенность таких интегрированных СОН ПИОН/ДСНС заключается в том, что в них обеспечены условия для дальнейшего расширения ППИ в комплексе, а также достигнуты предпосылки для выполнения операций коррекции показаний системы ПИОН в обоих каналах (навигации и ориентации) по сигналам ДСНС.
Однако такое расширение ППИ и функций достигнуто ценой существенного увеличения габаритов и масс антенного устройства. В антенное устройство ДСНС включают не менее трех разнесенных приемных антенн с узкой диаграммой направленности. Эти антенны должны быть разнесены относительно друг друга на измерительные базы l, не менее 1 м (l≥1 м).
Общий недостаток, присущий всем интегрированным СОН (ПИОН/АСОН; ПИОН/СНС; ПИОН/ДСНС и др.), заключается в отсутствии свойств автономности, отказоустойчивости и помехозащищенности систем.
Вариант интегрированной СОН на базе объединения систем ПИОН с ДСНС и обеспечения коррекции инерциальной системы по сигналам системы спутниковой навигации наиболее близок к схеме СОН, предлагаемой в настоящем изобретении, поэтому он принят за прототип (табл. 1).
В задачу настоящего изобретения входит разработка способа полностью автономной, отказоустойчивой ориентации и навигации подвижного объекта на основе коррекции системы платформенной инерциальной ориентации и навигации по сигналам автономной системы в условиях функциональной избыточности информации.
Решение поставленной задачи в настоящем изобретении достигают тем, что в комплексе вместо подсистемы ДСНС, выполняющей корректирующую функцию, применяют полностью автономную СОН, работающую на основе использования информации о геофизических полях (ГФП).
В предлагаемом изобретении система ПИОН выступает в роли корректируемой системы, а в качестве корректирующей СОН предлагается использовать автономную систему, работающую на основе информации о векторах ГФП в околоземном пространстве в районе формирования траектории движения ПО: систем) бесплатформенной инвариантной навигации и ориентации многовекторной - БИНОМ.
Система БИНОМ представляет собой измерительно-вычислительную систему (ИВС), состоящую из бесплатформенного измерительного модуля (БИМ) и вычислителя (БЦВМ). В состав БИМ входят три трехосных блока датчиков первичной информации (ДПИ) с ортогональными измерительными осями:
- акселерометров (ТБА-Б),
- гироскопов (ТБГ-Б),
- магнитометров (ТБМ), установленных непосредственно на корпусе ПО.
Авторы изобретения дали предлагаемому способу творческое название АККОРД (автономный комплекс корректируемый дифференциальный). Предлагаемое изобретение поясняется чертежами (Фиг. 1-7).
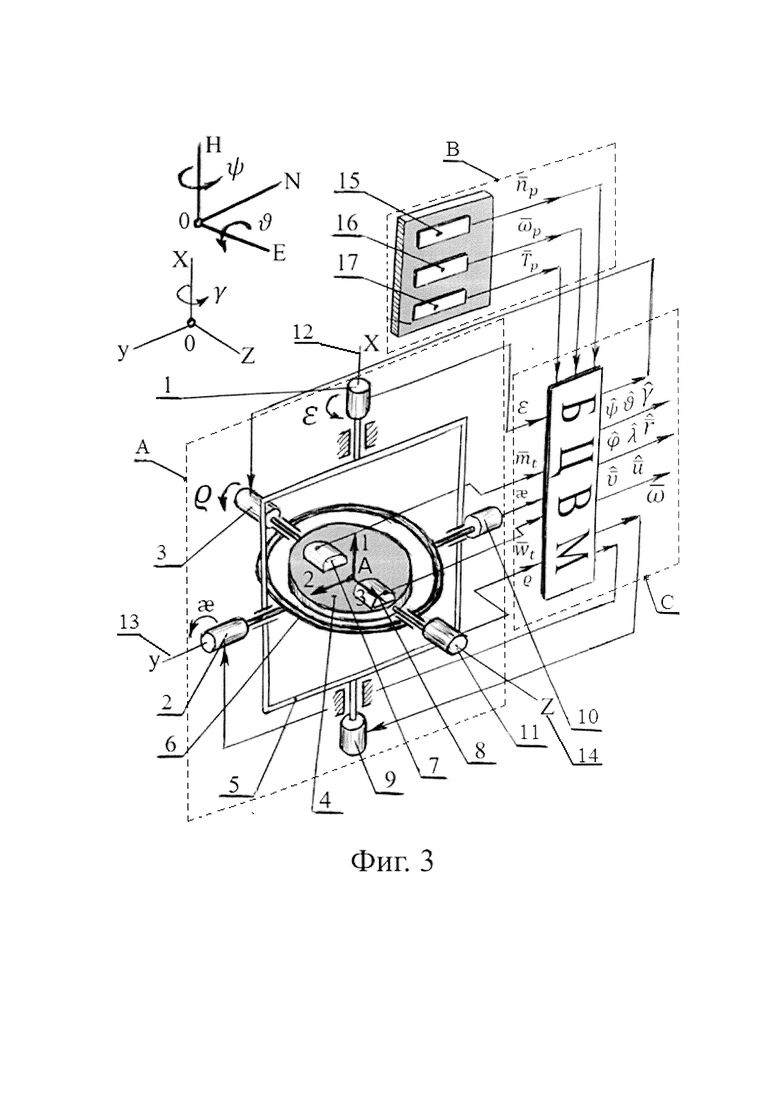
На Фиг. 1 и 3 представлены, соответственно, структура и функциональная схема измерительно-вычислительного комплекса (ИВК) АККОРД. А - трехосный гиростабилизатор (ТГС), В - бесплатформенный измерительный модуль (БИМ),
С - вычислитель (бортовая цифровая вычислительная машина - БЦВМ),
АС - система ПИОН (корректируемая система),
ВС - система БИНОМ (корректирующая система),
1, 2, 3 - датчики команд (ДК) ТГС (датчики углов поворота рам карданного подвеса -
4 - гиростабилизированная платформа (ГСП),
5 - наружная рама карданного подвеса,
6 - внутренняя рама карданного подвеса,
7 - трехосный блок акселерометров платформенный (ТБА-П),
8 - трехосный блок гироскопов платформенный (ТБГ-П),
9, 10, 11 - стабдвигатели ТГС по осям стабилизации,
12, 13, 14 - оси стабилизации ГСП, соответственно х, у, z,
15 - трехосный блок акселерометров бесплатформенный (ТБА-Б),
16 - трехосный блок гироскопов бесплатформенный (ТБГ-Б),
17 - трехосный блок магнитометров (ТБМ) системы БИНОМ.
На Фиг. 2 представлена схема формирования рядов отсчетных импульсов:
- тактовых с тактовой частотой (νT),
- шаговых с шаговой частотой (νШ),
- циклических с циклической частотой (νЦ).
На Фиг. 4, 5 представлены, соответственно, граф отсчетных систем координат (базисов) и схема формирования векторных многогранников
р, f, q, t, m- обозначения отсчетных систем координат (базисов), используемых для информационного и математического обеспечения ИВК (табл. 2),
 - векторы геофизической (ГФИ) и первичной приборной (ППИ) информации (см. в тексте - с. 6-13).
- векторы геофизической (ГФИ) и первичной приборной (ППИ) информации (см. в тексте - с. 6-13).
На Фиг. 6 указаны режимы работы ИВК АККОРД в эксплуатации.
Р1 - режим технологической подготовки ИВК АККОРД,
Р2 - режим начальной автономной выставки (НАВ) ИВК,
Р3-режим штатной работы комплекса,
Р4 - режим встроенного самоконтроля,
Р5 - резервно-аварийные режимы (РАР) работы ИВК.
На Фиг. 7 представлена схема информационного и технологического обеспечения ИВК АККОРД.
I - операции технологической подготовки системы ПИОН,
II - операции начальной автономной выставки (НАВ) системы ПИОН,
III - операции получения и обработки ППИ в системе ПИОН,
IV - операции технологической подготовки системы БИНОМ,
V - операции начальной расширенной автономной выставки (НРАВ) системы БИНОМ,
VI - операции измерений с помощью БИМ и обработки ППИ в системе БИНОМ,
VII - операции обработки многомерной информации,
VIII - операции обработки информации по приемам ПИН/ГВИН,
IX - операции обработки информации по приемам коррекции,
X - операции обработки информации по приемам резервно-аварийных конфигураций (РАК),
XI - операции обработки информации по приемам автономного контроля и нормировки (АКН).
На Фиг. 1-7 выделены темным фоном те блоки и звенья, которые соответствуют вновь вводимым техническим решениям и приемам по предлагаемому изобретению. Блоки и звенья, не выделенные темным фоном, соответствуют техническим решениям и приемам, известным до предлагаемого изобретения.
Система АККОРД представляет собой двухкомпонентный (ПИОН/БИНОМ) трехчастотный измерительно-вычислительный комплекс (ИВК) (Фиг. 1-3), имеющий переменную реконфигурируемую структуру и переменный режим работы (Фиг. 4-7).
Топология всего околоземного пространства характеризуется набором векторов ГФП, которые в совокупности образуют векторные многогранники  конфигурация которых строго индивидуальна для каждой точки А пространства. Конфигурации векторных трехгранников и многогранников могут быть расширены за счет использования расширенной ГФИ и ППИ.
конфигурация которых строго индивидуальна для каждой точки А пространства. Конфигурации векторных трехгранников и многогранников могут быть расширены за счет использования расширенной ГФИ и ППИ.
Информационное обеспечение ИВК АККОРД построено на основе математического описания векторов ППИ  с использованием различных конфигураций векторных многогранников (Фиг. 5).
с использованием различных конфигураций векторных многогранников (Фиг. 5).

Структурное и функциональное объединение систем ПИОН и БИНОМ в один ИВК АККОРД обеспечивают с помощью вычислителя (Фиг. 1-3) с учетом использования общего информационно-технологического и программно-математического обеспечений комплекса (Фиг. 4-7). За счет реконфигурации приемов обработки информации РАК возможна гибкая реализация трех конфигураций (штатной и двух РАР) ИВК АККОРД и обеспечение работы комплекса в разных режимах: штатном, двух резервно-аварийных (РАР-1,2) и трех сервисных (Фиг. 6). За счет объединения систем ПИОН и БИНОМ в один ИВК АККОРД обеспечивают расширение ППИ в комплексе:

где  векторы ППИ в системах ПИОН, БИНОМ и ИВК АККОРД, соответственно,
векторы ППИ в системах ПИОН, БИНОМ и ИВК АККОРД, соответственно,
 векторы кажущегося ускорения и абсолютной угловой скорости вращения ГСП в инерциальном пространстве, заданные в базисе t=123, связанном с платформой,
векторы кажущегося ускорения и абсолютной угловой скорости вращения ГСП в инерциальном пространстве, заданные в базисе t=123, связанном с платформой,
 углы ориентации ГСП относительно корпуса ПО (приборные углы поворота платформы по схеме карданного подвеса ТГС
углы ориентации ГСП относительно корпуса ПО (приборные углы поворота платформы по схеме карданного подвеса ТГС
 оценки векторов кажущегося ускорения, абсолютной угловой скорости вращения ПО и напряженности результирующего магнитного поля, заданные в базисе
оценки векторов кажущегося ускорения, абсолютной угловой скорости вращения ПО и напряженности результирующего магнитного поля, заданные в базисе связанном с объектом (Фиг. 4).
связанном с объектом (Фиг. 4).
Векторы  формируют на основе показаний платформенных блоков ТБА-П, ТБГ-П (Фиг. 2-4):
формируют на основе показаний платформенных блоков ТБА-П, ТБГ-П (Фиг. 2-4):

Приборные углы ориентации ГСП относительно корпуса ПО  измеряют с помощью датчиков команд (ДК) (Фиг. 3).
измеряют с помощью датчиков команд (ДК) (Фиг. 3).
ППИ о векторах  формируют на основе сигналов бесплатформенных ДПИ блоков ТБА-Б, ТБГ-Б, ТБМ системы БИНОМ в приборном базисе р, построенном на основе осей чувствительностей датчиков.
формируют на основе сигналов бесплатформенных ДПИ блоков ТБА-Б, ТБГ-Б, ТБМ системы БИНОМ в приборном базисе р, построенном на основе осей чувствительностей датчиков.
Показания ТБМ соответствуют вектору  формируемому на основе расширенного уравнения Пуассона [10]:
формируемому на основе расширенного уравнения Пуассона [10]:

где  вектор напряженности магнитного поля Земли (МПЗ) в точке установки ТБМ, заданный в географическом базисе q=NHE,
вектор напряженности магнитного поля Земли (МПЗ) в точке установки ТБМ, заданный в географическом базисе q=NHE,
 векторы напряженностей магнитных полей объекта (МПО) и электромагнитных источников помех (ЭМП), обусловленных намагниченностью ПО и работой электромагнитных устройств на ПО,
векторы напряженностей магнитных полей объекта (МПО) и электромагнитных источников помех (ЭМП), обусловленных намагниченностью ПО и работой электромагнитных устройств на ПО,
 - матрицы погрешностей сборки ТБМ и монтажа модуля БИМ на ПО, соответственно, (3×3),
- матрицы погрешностей сборки ТБМ и монтажа модуля БИМ на ПО, соответственно, (3×3),
S- матрица коэффициентов Пуассона для ПО (3×3),
Е - единичная матрица (3×3),
А - матрица ориентации ПО (3×3). Причем
где  - матрицы углов ориентации ПО (курса -ψ,тангажа - ϑ,крена -γ),
- матрицы углов ориентации ПО (курса -ψ,тангажа - ϑ,крена -γ),
отсчитанных по схеме Эйлера-Крылова,
 - направляющие косинусы матрицы ориентации ПО А.
- направляющие косинусы матрицы ориентации ПО А.
Компоненты вектора  в осях географического базиса q=NHE вычисляют по модели нормального МПЗ [8]:
в осях географического базиса q=NHE вычисляют по модели нормального МПЗ [8]:

Геомагнитный потенциал U представляют с помощью сферических гармонических рядов Гаусса [8]:

где R - средний радиус Земли, R=6378211 м,
r - модуль радиуса-вектора  из центра Земли О до точки А наблюдения,
из центра Земли О до точки А наблюдения,
ϕ,λ - сферические координаты точки наблюдения А (географическая широта и долгота),
m, n - степень и порядок членов разложения в ряд,
 - присоединенные функции Лежандра.
- присоединенные функции Лежандра.
Совокупность векторов  воспроизводимых с помощью платформенных ДПИ и системы БИНОМ, а также углов стабилизации платформы
воспроизводимых с помощью платформенных ДПИ и системы БИНОМ, а также углов стабилизации платформы  по сигналам ДК ТГС, образует первичную приборную информацию (ППИ) ИВК АККОРД.
по сигналам ДК ТГС, образует первичную приборную информацию (ППИ) ИВК АККОРД.
В задачу информационно-технологического и программно-математического обеспечения ИВК АККОРД входит разработка операций, а также приемов получения и обработки ППИ комплекса (Фиг. 7) с целью реализации различных режимов работы ИВК (Фиг. 6) в различных конфигурациях. Однако векторы : заданы в различных системах координат- отсчетных базисах (Фиг. 4).
заданы в различных системах координат- отсчетных базисах (Фиг. 4).
Поэтому решение задачи формирования и обработки ППИ требует предварительного выполнения операции согласования базисов и преобразования векторов из одного отсчетного базиса в другой.
Согласование отсчетных базисов выполняют с помощью матрического уравнения (Фиг. 4):

Или

где С, D - матрицы ориентации ГСП (базиса t=123) относительно ПО (базиса m=XYZ) и Земли (базиса q=NHE), соответственно,
L, К - конструктивные матрицы установки ТГС на ПО,
 - матрицы приборных углов ориентации ГСП относительно корпуса ПО,
- матрицы приборных углов ориентации ГСП относительно корпуса ПО,
формируемых по сигналам ДК (Фиг. 3),
 - матрицы углов ориентации
- матрицы углов ориентации  относительно географического базиса q=NHE.
относительно географического базиса q=NHE.
Информацию об оценках углов ориентации ПО в околоземном пространстве ( формируют на основе обработки ППИ, получаемой с помощью модуля БИМ
формируют на основе обработки ППИ, получаемой с помощью модуля БИМ  Элементы матрицы
Элементы матрицы  являются наблюдаемыми (вычисляемыми по сигналам
являются наблюдаемыми (вычисляемыми по сигналам 
На основе графа отсчетных базисов (Фиг. 4) и конфигураций векторных многогранников (Фиг. 5) могут быть составлены векторно-матричные уравнения, которые используют в дальнейшем для формирования функциональных приемов обработки информации в ИВК АККОРД (Фиг. 7):
 - вектор абсолютного ускорения ПО в инерциальном пространстве, заданный в базисе q=NHE,
- вектор абсолютного ускорения ПО в инерциальном пространстве, заданный в базисе q=NHE,
 - вектор ускорения свободно падающего тела в поле тяжести Земли (ПТЗ), заданный в базисах q u m,
- вектор ускорения свободно падающего тела в поле тяжести Земли (ПТЗ), заданный в базисах q u m,
 - вектор угловой скорости суточного вращения Земли, заданный в базисах q u m,
- вектор угловой скорости суточного вращения Земли, заданный в базисах q u m,
 - вектор относительной угловой скорости вращения ПО в околоземном пространстве, заданный в базисах q u m,
- вектор относительной угловой скорости вращения ПО в околоземном пространстве, заданный в базисах q u m,
 - вектор кажущегося ускорения ПО, заданный в базисах q u m.
- вектор кажущегося ускорения ПО, заданный в базисах q u m.
Информацию о векторах ГФП в настоящее время формируют на основе использования моделей нормальных геофизических полей [9]:
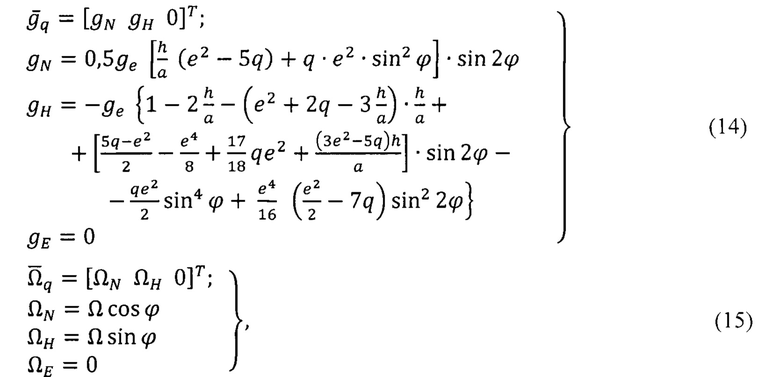
где a, b - большая и малая полуоси фигуры Земли (референц-эллипсоида), а=6378245 м, b=6356863 м;
R - средний радиус Земли;
h - высота точки наблюдения над поверхностью Земли, принимаемой за референц-эллипсоид;
е - эксцентриситет фигуры Земли;
q - отношение центростремительного ускорения к ускорению свободно падающего тела на экваторе 
Ω - угловая скорость суточного вращения Земли, 
Причем

Модель нормального МПЗ (9), (10) может быть задана в различных формах, регламентируемых применением различных стандартов (WMM-2020; ЕММ-2020; HDGM-2020 и др.), использующих описание геомагнитного поля в виде модели IGRF [8], [9].
Многомерную ППИ, формирующую на основе сигналов платформенных и бесплатформенных ДПИ систем ПИОН и БИНОМ, можно существенно расширить, если дополнительно использовать производные векторы (Фиг. 5):

ИВК АККОРД воспроизводит физическим и математическим путем информации о многогранниках, ребра которых построены на векторах ППИ и ГФИ (Фиг. 5).
Для всех векторов ППИ и ГФИ в соответствии с выражениями (9), (10), (13)-(17) можно составить обобщенное матричное уравнение:
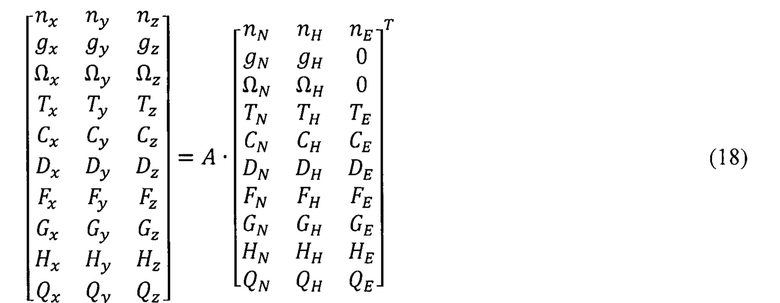
Анализ выражений (5)-(18) показывает, что векторы ППИ и ГФИ содержат многообразную информацию:
- конструкторскую (К, L),
- технологическую
- эксплуатационную 
- геофизическую 
- пилотажную 
- навигационную 
В матричном уравнении (18) вся эта многообразная информация неявно проявляется в связанном интегральном виде.
С информационной точки зрения система АККОРД представляет собой
- двухкомпонентный (ПИОН/БИНОМ) (Фиг. 1, 3),
- многоканальный (каналы ориентации, навигации, стабилизации, коррекции, встроенного контроля, реконфигурации),
- многовекторный (векторы ППИ и ГФИ) (Фиг. 4,5),
- многомерный,
- многофункциональный,
- трехчастотный (Фиг. 2)
и многорежимный (Фиг. 6). ИВК с переменной адаптируемой и реконфигурируемой структурой и различными режимами работы.
Функционирование ИВК АККОРД основано на формировании ППИ  и ГФИ
и ГФИ  путем дискретной обработки сигналов ДЛИ систем ПИОН и БИНОМ, а также на последующей обработке расширенной многомерной информации по функциональным приемам.
путем дискретной обработки сигналов ДЛИ систем ПИОН и БИНОМ, а также на последующей обработке расширенной многомерной информации по функциональным приемам.
Работа ИВК АККОРД сводится к последовательному выполнению операций формирования и обработки многомерной информации (Фиг. 7):
I. Заранее в предстартовых условиях выполняют операции паспортизации результатов метрологических тарировок, аналитических юстировок, технологических калибровок и испытаний блоков ТБА-П, ТБГ-П, установленных на ГСП (поз. 4, 7, 8 на Фиг. 3).
Технологические операции (поз. I на Фиг. 7) выполняют по методике, регламентированной в нормативной, конструкторско-технологической документации и руководящих технических материалах на систему ПИОН. Обработку технологической информации выполняют на основе использования технологических приемов (поз. I на Фиг. 7).
II. В предстартовых условиях на неподвижном основании (в режиме ZUPT) выполняют операции начальной автономной выставки ГСП в начальное положение, соответствующее ориентации осей базиса t=123, связанного с платформой, по направлениям осей неподвижного базиса (например, географического базиса q0=N0 Н0 Е0, Фиг. 4).
При этом могут быть использованы широко применяемые на практике методика, технология и приемы аналитического горизонт-компасирования (АГК) платформы с использованием ППИ  получаемой с помощью платформенных блоков (ТБА-П; ТБГ-П, поз.7, 8 на Фиг. 3).
получаемой с помощью платформенных блоков (ТБА-П; ТБГ-П, поз.7, 8 на Фиг. 3).
Существенного сокращения времени готовности системы ПИОН к работе можно достичь за счет использования методики, технологии и приемов ускоренной расширенной автономной начальной выставки (УРАН-выставки) ГСП. В основу формирования приемов УРАН-выставки ГСП положено матричное уравнение (11). Если в результате выполнения операции УР АН-выставки ГСП приходит в согласованное с географическим базисом q0=N0 H0 E0 положение, то при точной выставке матрица D0 обращается в единичную матрицу:

С учетом выполнения условия (19) на основании уравнения (11) находят оценку программной приборной матрицы 

Оценку матрицы начальной автономной выставки ПО  находят по приему начальной расширенной автономной выставки (НРАВ) на основе обработки информации о сигналах блоков системы БИНОМ (поз.15, 16, 17 на Фиг. 3).
находят по приему начальной расширенной автономной выставки (НРАВ) на основе обработки информации о сигналах блоков системы БИНОМ (поз.15, 16, 17 на Фиг. 3).
С другой стороны, имеем:

Совместным решением уравнений (20) и (21) находят программные значения углов поворота рам карданного подвеса  и самой платформы
и самой платформы  (Фиг. 3). Сравнением программных значений приборных углов ориентации платформы
(Фиг. 3). Сравнением программных значений приборных углов ориентации платформы  с их реальными значениями
с их реальными значениями  регистрируемыми с помощью ДК 1, 2, 3 (Фиг. 3) в разарретированном состоянии платформы, определяют ошибки выставки ГСП относительно связанного базиса m=XYZ:
регистрируемыми с помощью ДК 1, 2, 3 (Фиг. 3) в разарретированном состоянии платформы, определяют ошибки выставки ГСП относительно связанного базиса m=XYZ:

Сигналы ошибок  подают в соответствующие цепи стабилизации и с помощью стабдвигателей 9, 10, 11 (Фиг. 3) отрабатывают погрешности в ноль. Приточном выполнении условий (22) автоматически выполняется равенство (19), гарантирующее приведение ГСП в согласованное положение, при котором
подают в соответствующие цепи стабилизации и с помощью стабдвигателей 9, 10, 11 (Фиг. 3) отрабатывают погрешности в ноль. Приточном выполнении условий (22) автоматически выполняется равенство (19), гарантирующее приведение ГСП в согласованное положение, при котором

Время выполнения операции УРАН-выставки ГСП в исходное положение определяется временем отработки ошибок стабилизации платформы в ноль с помощью стабдвигателей 
III. После реализации операций технологической подготовки системы ПИОН и операций УР АН-выставки ГСП в исходное положение цепи стабилизации по сигналам ТБГ-П 8 (Фиг. 3) поддерживают стабилизированное положение платформы в пространстве, характеризуемое условием согласования отсчетных базисов t и q. При этом выполняются равенства:

Выполняют операции обработки многомерной информации в каналах автономной ориентации и навигации системы ПИОН. (поз. III на Фиг. 7).
В штатном режиме при движении ПО  справедливо матричное уравнение:
справедливо матричное уравнение:

Элементы  матрицы приборной ориентации ГСП определяют на основе показаний ДК 1, 2, 3 (Фиг. 3) о текущих значениях приборных углов
матрицы приборной ориентации ГСП определяют на основе показаний ДК 1, 2, 3 (Фиг. 3) о текущих значениях приборных углов 
Путем обращения матричного уравнения (25) находят прием автономной ориентации ПО в системе ПИОН:

При решении задачи платформенной инерциальной навигации (ПИН) используют классические интегральные алгоритмы инерциальной навигации [7].
IV. Заранее до старта ПО выполняют операции метрологических тарировок, аналитических юстировок, технологических калибровок и испытаний элементов, блоков и модуля БИМ.
Технологические операции выполняют по методике, описанной в научно-технической литературе [10]. Обработку технологической информации выполняют по приемам технологического обеспечения модуля [10].
V. На основе результатов измерений векторов  с помощью многоблочного модуля БИМ в точке старта
с помощью многоблочного модуля БИМ в точке старта  при неподвижном состоянииПО
при неподвижном состоянииПО  решают задачу начальной расширенной автономной выставки (НРАВ) ПО и системы БИНОМ (поз. V на Фиг. 7).
решают задачу начальной расширенной автономной выставки (НРАВ) ПО и системы БИНОМ (поз. V на Фиг. 7).
При условии неподвижности ПО в предстартовых условиях (в режиме ZUPT) имеем:

Оценку вектора  определяют на основе обращения формулы (5) с учетом предварительно идентифицированных погрешностей сборки ТБМ (ВМ) и монтажа модуля на ПО (М), а также магнитных свойств объекта
определяют на основе обращения формулы (5) с учетом предварительно идентифицированных погрешностей сборки ТБМ (ВМ) и монтажа модуля на ПО (М), а также магнитных свойств объекта 

С другой стороны, с учетом начальной навигационной информации  по формулам (9), (10), (14), (15), (17) вычисляют векторы ГФП:
по формулам (9), (10), (14), (15), (17) вычисляют векторы ГФП:
и другие векторы (17).
Составляют матричное уравнение (18) для компонент векторов, соответствующих начальным условиям  из которого путем декомпозиции формируют несколько матричных уравнений с квадратными матрицами:
из которого путем декомпозиции формируют несколько матричных уравнений с квадратными матрицами:

Путем умножения уравнения (30) справа на обратную матрицу  получают несколько вариантов оценок и средней оценки матрицы начальной ориентации ПО в точке старта:
получают несколько вариантов оценок и средней оценки матрицы начальной ориентации ПО в точке старта:

По вычисленным значениям оценок направляющих косинусов  определяют оценки начальных значений и знаки углов ориентации ПО в предстартовых условиях [11] (табл. 3, 4, 5)
определяют оценки начальных значений и знаки углов ориентации ПО в предстартовых условиях [11] (табл. 3, 4, 5)

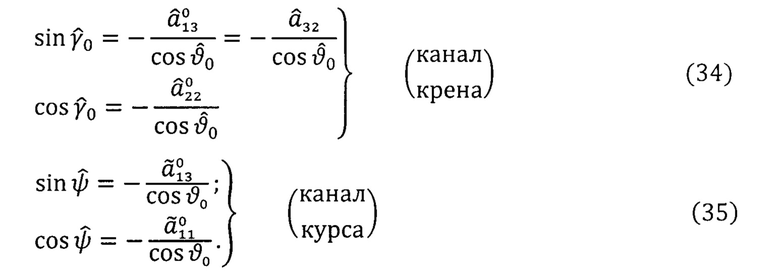
Формируют системы инвариантных уравнений, например, систему уравнений для инвариантов 

Из решения системы уравнений (36) находят оценку вектора 

Составляют кинематическое уравнение:

Откуда находят оценку вектора угловой скорости дрейфа гироскопов в режиме НРАВ:

Пилотажную  и навигационную
и навигационную  информацию, полученную при выполнении операции НРАВ, запоминают в БЦВМ для дальнейшего использования при выполнении операций (поз.VI-XI на Фиг. 7).
информацию, полученную при выполнении операции НРАВ, запоминают в БЦВМ для дальнейшего использования при выполнении операций (поз.VI-XI на Фиг. 7).
После старта ПО из начальной точки  с начальными условиями
с начальными условиями  начинают выполнять операции в БЦВМ (Фиг. 1-3) по п. VI-XI (Фиг. 7) с обработкой информации в трех темпах с частотами
начинают выполнять операции в БЦВМ (Фиг. 1-3) по п. VI-XI (Фиг. 7) с обработкой информации в трех темпах с частотами  (Фиг. 2).
(Фиг. 2).
VI. Выполняют операцию измерений компонент векторов  с частотой опроса
с частотой опроса  бесплатформенных ДЛИ (ТБА-Б, ТБГ-Б, ТБМ) системы БИНОМ (Фиг. 3). С учетом технологической информации, полученной при выполнении операции по п. IV (Фиг. 7), производят оценки векторов, приведенных к базису m=XYZ, на каждом μ-ом шаге вычислений
бесплатформенных ДЛИ (ТБА-Б, ТБГ-Б, ТБМ) системы БИНОМ (Фиг. 3). С учетом технологической информации, полученной при выполнении операции по п. IV (Фиг. 7), производят оценки векторов, приведенных к базису m=XYZ, на каждом μ-ом шаге вычислений
(μ=1,2,3…): 
 - оценки показаний блоков ТБА, ТБГ, ТБМ модуля БИМ, приведенных к связанному базису m=XYZ и вычисленных на μ-ом шаге вычислений (μ=1,2…)
- оценки показаний блоков ТБА, ТБГ, ТБМ модуля БИМ, приведенных к связанному базису m=XYZ и вычисленных на μ-ом шаге вычислений (μ=1,2…)
Формулы (40) составляют ядро приемов обработки ППИ (поз. VI на Фиг. 7). Обновление ППИ в блоке (поз. VI на Фиг. 7) производят с частотой опроса ДПИ  (Фиг. 2).
(Фиг. 2).

VII. Выполняют обработку многомерной информации  с учетом реконфигурации ИВК АККОРД. В частности, для штатной конфигурации ИВК в блоке (поз. VII на Фиг. 7) решают дискретно (μ=1,2…) задачу автономной ориентации ПО по приемам дифференциальной расширенной ориентации (поз. VII на Фиг. 7).
с учетом реконфигурации ИВК АККОРД. В частности, для штатной конфигурации ИВК в блоке (поз. VII на Фиг. 7) решают дискретно (μ=1,2…) задачу автономной ориентации ПО по приемам дифференциальной расширенной ориентации (поз. VII на Фиг. 7).
На основе дискретных приведенных показаний блоков  снимаемых с шаговой частотой опроса датчиков
снимаемых с шаговой частотой опроса датчиков  формируют разностные уравнения на двух соседних шагах вычислений (μиμ-1), которые приводят к одному векторно-матричному уравнению с расширенной магнито-инерциальной информацией:
формируют разностные уравнения на двух соседних шагах вычислений (μиμ-1), которые приводят к одному векторно-матричному уравнению с расширенной магнито-инерциальной информацией:

 - вариации углов ориентации ПО на μ-ом шаге вычислений,
- вариации углов ориентации ПО на μ-ом шаге вычислений,
 - прямоугольная матрица (6x3) идентификации,
- прямоугольная матрица (6x3) идентификации,

 - вектор-функция (6×1).
- вектор-функция (6×1).
Все коэффициенты матрицы идентификации  и компоненты вектор-функции
и компоненты вектор-функции  определяют по конечным формулам на основе информации о величинах, найденных на предыдущем (μ-1)-ом шаге вычислений.
определяют по конечным формулам на основе информации о величинах, найденных на предыдущем (μ-1)-ом шаге вычислений.
Уравнение идентификации (41) содержит функционально избыточную информацию о вариациях углов ориентации ПО на μ-ом шаге вычислений. Этот факт позволяет повысить показатели надежности и устойчивости работы системы БИНОМ.
В соответствии с принципом декомпозиции и комбинирования на основе уравнения (41) можно составить δ частных векторно-матричных уравнений идентификации с квадратными матрицами:

где ν - номер варианта частного уравнения идентификации
Причем

Для практических целей достаточно выбрать ν<2, например 
На основе решений уравнений идентификации (42) получают прием многовекторной дифференциальной ориентации:

Причем

После определения вариаций углов ориентации ПО на каждом μ-ом шаге вычислений с учетом v вариантов оценок по формулам (44), (45) выполняют операции
осреднения значений вариаций  а также определяют оценки углов ориентации ПО и их производных по времени на μ-ом шаге:
а также определяют оценки углов ориентации ПО и их производных по времени на μ-ом шаге:
Совокупность выражений (41)-(47) составляет ядро приемов многовекторной дифференциальной ориентации.
Для повышения степени достоверности решения задачи автономной ориентации с целью контроля правильности вычислений выполняют операции по приемам векторного автономного способа ориентации.
Определяют оценки компонент вектора относительной угловой скорости вращения  в связанном
в связанном  и географическом
и географическом  базисах:
базисах:
Формируют оценки вектора в связанной (m=XYZ) и географическом (q=NHE) базисах:
в связанной (m=XYZ) и географическом (q=NHE) базисах:

и другие векторы по формулам (17).
На каждом μ-ом шаге вычислений (μ=1,2,…) формируют векторно-матричное уравнение связей (18) и решают его в условиях функциональной избыточности информации.
Совокупность выражений (41)-(47) и (18), (48), (49) составляет основу формирования приемов дифференциальной расширенной ориентации.
VIII. С учетом решенной задачи автономной ориентации ПО по приемам обработки информации (поз. VII на Фиг. 7) с шаговой частотой  выполняют дискретную обработку многомерной информации
выполняют дискретную обработку многомерной информации  с циклической частотой
с циклической частотой  сцелью решения задачи автономной навигации ПО по приемам ПИН/ГВИН (поз. VIII на Фиг. 7).
сцелью решения задачи автономной навигации ПО по приемам ПИН/ГВИН (поз. VIII на Фиг. 7).
Задачу автономной навигации в ИВК АККОРД решают по двухканальной схеме (ПИН/ГВИН):
- с помощью канала платформенной инерциальной навигации (ПИН)
- и с помощью канала бесплатформенной геофизической векторной инвариантной навигации (ГВИН).
Канал ПИН работает по интегральным приемам инерциальной навигации за счет обработки инерциальной информации, получаемой с помощью платформенного блока
акселерометров ТБА-П (поз. 8 на Фиг. 3) [1,2]:

При точной стабилизации ГСП выполняются условия (19), (23) и приемы ПИН (50) упрощаются.
Для канала ГВИН заранее формируют в районе предполагаемого движения ПО геомагнитную сетку (ГМС), включающую в свой состав несколько априорно заданных опорных реперных точек (ОРТ)  для которых предварительно задают географические координаты
для которых предварительно задают географические координаты  и параметры МПЗ [12,13]:
и параметры МПЗ [12,13]:

где  - географические координаты n-ой ОРТ
- географические координаты n-ой ОРТ 
 - вектор напряженности и тензор градиентов МПЗ в n-ой ОРТ
- вектор напряженности и тензор градиентов МПЗ в n-ой ОРТ 
 - векторы градиентов МПЗ в n-ой ОРТ
- векторы градиентов МПЗ в n-ой ОРТ 
С циклической частотой обновления навигационной информации  (Фиг. 2) определяют компоненты разностных векторов для каждой n-ой ОРТ
(Фиг. 2) определяют компоненты разностных векторов для каждой n-ой ОРТ 

Вычисляют радиус корреляции  текущей точки местоположения ПО
текущей точки местоположения ПО
 относительно n-ой ОРТ
относительно n-ой ОРТ

По формуле геомагнитного позиционирования ПО в ГМС определяют радиус-векторы  текущей точки местоположения объекта:
текущей точки местоположения объекта:

Для каждого ν -ого цикла вычислений (ν=1,2,…) определяют оценку осредненного значения радиуса-вектора точки А текущего местоположения ПО:

Для определения компонент вектора скорости ПС  используют показания блока ТБА-Б модуля БИМ (поз. В на Фиг. 3)
используют показания блока ТБА-Б модуля БИМ (поз. В на Фиг. 3) , которые предварительно приводят к географическому базису q=NHE:
, которые предварительно приводят к географическому базису q=NHE:

Определяют разности приведенных показаний ТБА на ν-ом и (ν-1)-oм циклах вычислений:

Определяют оценку вариации вектора скорости ПО  (ν=1,2,…):
(ν=1,2,…):

Матрицу идентификации [R] и вектор-функцию  определяют на основе информации о параметрах, известных для ν -ого и (ν-1)-oгo циклов вычислений.
определяют на основе информации о параметрах, известных для ν -ого и (ν-1)-oгo циклов вычислений.
Определяют оценку скорости  ПО на ν-ом цикле вычислений в географическом базисе q=NHE:
ПО на ν-ом цикле вычислений в географическом базисе q=NHE:

Совокупность формул (50) (канал ПИН) и (51)-(59) (канал ГВИН) составляют ядро математического обеспечения канала ПИН/ГВИН (поз. VIII на Фиг. 7).
IX. Выполняют операции коррекции системы ПИОН по сигналам системы БИНОМ.
Определяют элементы матрицы поправок δC для канала ориентации системы ПИОН:

Матрица D может быть определена на основе использования информации от платформенных блоков  или принята равной единичной матрице (D≈Е).
или принята равной единичной матрице (D≈Е).
Поправки  к приборным углам ТГС
к приборным углам ТГС  (Фиг. 3) могут быть использованы для компенсации погрешностей стабилизации ГСП
(Фиг. 3) могут быть использованы для компенсации погрешностей стабилизации ГСП  геометрическим (физическим) путем в соответствии с выражением (22) или учтены в приемах обработки информации в канале ориентации системы ПИОН (24)-(26).
геометрическим (физическим) путем в соответствии с выражением (22) или учтены в приемах обработки информации в канале ориентации системы ПИОН (24)-(26).
Путем сравнения навигационной информации на выходе каналов ПИН  и ГВИН
и ГВИН  вычисляют оценку вектора навигационных поправок (
вычисляют оценку вектора навигационных поправок (

Вектор навигационных поправок  учитывают в канале ПИН системы ПИОН:
учитывают в канале ПИН системы ПИОН:

Формулы (60)-(62) в совокупности определяют приемы коррекции каналов ориентации и навигации системы ПИОН по сигналам соответствующих каналов системы БИНОМ (Фиг. 7).
X. В связи с возможными эксплуатационными отказами (полными или частичными) в ИВК АККОРД с целью обеспечения свойства отказоустойчивости комплекса в системе БИНОМ предусмотрен блок адаптации ИВК к отказам (поз. X на Фиг. 7) с использованием реконфигурируемых приемов комбинированного управления (РАК) (табл. 6) [11].
Штатному режиму работы ИВК соответствует конфигурация ШР-1 комплекса с полным использованием всех приемов обработки информации (формул (1)-(62)). Конфигурации РАК-1,4 предполагают поддержание работы ИВК в условиях полного отказа одной из двух компонентов комплекса (системы БИНОМ в РАР-1 или системы ПИОН в РАР-4).
В резервно-аварийной конфигурации РАК-2 (когда отказывают цепи стабилизации ТГС (Фиг. 3)) ГСП фиксируется в неподвижном относительно корпуса ПО с приборными углами ориентации  регистрируемыми с помощью датчиков команд (ДК). В этом случае система ПИОН превращается в систему бесплатформенной инерциальнойориентации и навигации (БИОН) с приемами обработки информации РАК, которые формируют по аналогии с приемами системы БИНОМ (формулы (1)-(4), (11)-(18), (40)-(50)).
регистрируемыми с помощью датчиков команд (ДК). В этом случае система ПИОН превращается в систему бесплатформенной инерциальнойориентации и навигации (БИОН) с приемами обработки информации РАК, которые формируют по аналогии с приемами системы БИНОМ (формулы (1)-(4), (11)-(18), (40)-(50)).
В резервно-аварийной конфигурации РАК-3 оценку приборных углов  выполняют по приемам РАК-3, аналогичным формулам (27)-(35).
выполняют по приемам РАК-3, аналогичным формулам (27)-(35).
XI. Для контроля за штатной работой ИВК АККОРД, ее компонентов и отдельных элементов, а также для идентификации возможных отказов их в эксплуатации в программном и алгоритмическом обеспечении комплекса предусмотрены операции автономного контроля и нормировки - АКН (поз.Р4 на Фиг. 6; поз. XI на Фиг. 7):
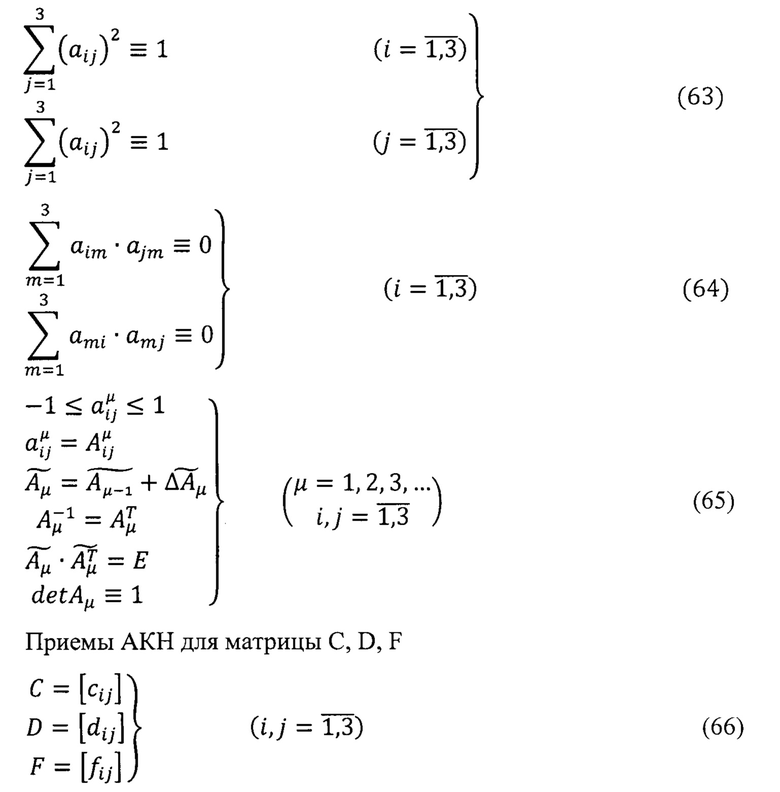
аналогичны приемам АКН (63)-(65) для матриц А ориентации ПО.
По результатам выполнения операций АКН для матриц А, С, D, F в заключение производят операции коррекции и нормировки результатов вычсилений в системах БИНОМ и ПИОН в штатном режиме работы или выполняют соответствующие операции реконфигурации ИВК в случаях идентификации отказа соответствующего элемента комплекса (Фиг. 6, 7).
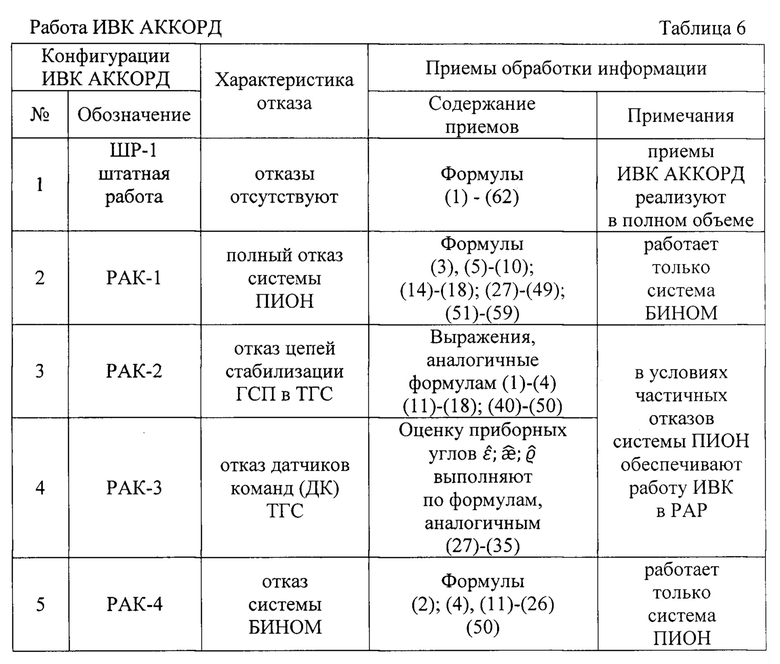
Из анализа структуры, схемотехнического (Фиг. 1-7) и математического (формулы (1)-(66)) обеспечений видно, что работа одного ИВК АККОРД в соответствии с предлагаемым изобретением эквивалентна работе четырех самостоятельных систем (табл. 6):

Таким образом, свойство отказоустойчивости ИВК, достигаемое за счет реконфигурации его структуры программно-математическим путем позволяет достичь технологического упрощения и соответствующего экономического выигрыша (4 системы в одном комплексе) без расширения и усложнения аппаратной части комплекса.
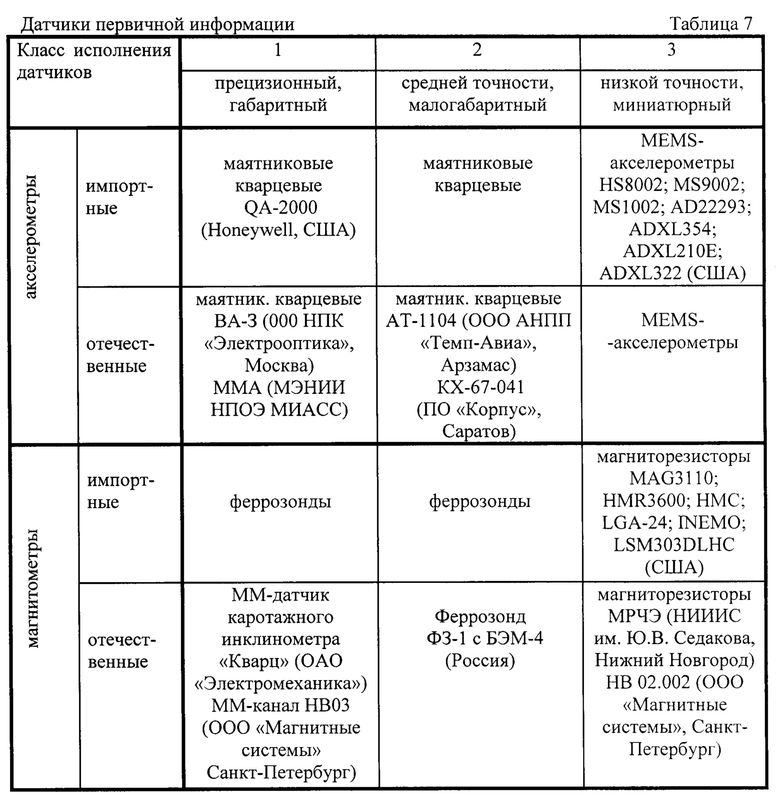
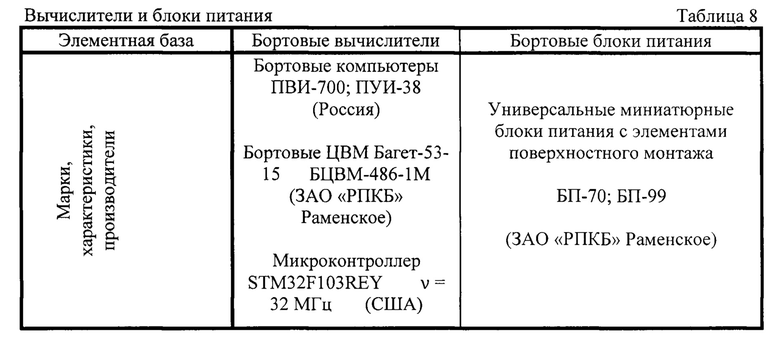
Практическая реализация предлагаемого изобретения может быть выполнена как на импортной, так и на отечественной элементной базе (табл. 7, 8).
Численные оценки расчетным путем показывают, что для реализации ИВК АККОРД на основе предлагаемого изобретения с допустимыми погрешностями ориентации ПО в пространстве в пределах 10'……20' достаточно использовать в составесистемы БИНОМ блоки векторных датчиков, имеющих инструментальные погрешности и разрешающие способности не хуже пороговых значений:

что соответствует уровню достижимых показателей для существующих (табл. 7), а тем более для перспективных векторных датчиков
Длина разрядной сетки МК в 24 бит, необходимая для обеспечения вычислительных операций при обработке информации с гарантированной точностью решения задачи автономной ориентации (с допустимой погрешностью и разрешающей способностью не хуже 1") предполагает:
- измерение компонент вектора  с помощью ТБМ с допустимой погрешностью
с помощью ТБМ с допустимой погрешностью  (с точностью до второго знака после запятой),
(с точностью до второго знака после запятой),
- измерение компонент вектора  с помощью ТБА с допустимой погрешностью
с помощью ТБА с допустимой погрешностью  (с точностью до пятого знака после запятой),
(с точностью до пятого знака после запятой),
- вычисление в МК функций эйлеровых углов с допустимой погрешностью, не превышающей 0,001% (с точностью до шестого знака после запятой).
Для сравнения следует указать на то, что в современных цифровых пилотажно-навигационных комплексах обработку информации выполняют с длиной разрядной сетки в 16…32 знака.
Определение потребной частоты обновления информации связано оценкой динамических свойств ПО, на котором предполагают реализовать ИВК в соответствии с предлагаемым изобретением. Численный анализ показывает, что для самого динамичного канала крена (вращения) ПО частота обновления информации в системе БИНОМ должна удовлетворять условию:

При допустимой погрешности  для высокоманевренного ПО
для высокоманевренного ПО 
 частота
частота  . Для маломаневренных ПО эта частота обновления информации в системе БИНОМ
. Для маломаневренных ПО эта частота обновления информации в системе БИНОМ  может быть снижена на 1…2 порядка частотаобновления информации в пилотажном
может быть снижена на 1…2 порядка частотаобновления информации в пилотажном  и навигационном
и навигационном  должны удовлетворять условию согласования:
должны удовлетворять условию согласования:

При частота обновления навигационной информации  условие (69) выполняется с большим запасом.
условие (69) выполняется с большим запасом.
С другой стороны, шаговая частота обновления информации  должна быть согласована с тактовой частотой
должна быть согласована с тактовой частотой  обработки приборной, геофизической и пилотажно-навигационной информации в МК:
обработки приборной, геофизической и пилотажно-навигационной информации в МК:

При выборе современных бортовых вычислителей (табл. 8) условие (70) выполняется.
Немаловажным фактом в пользу предлагаемого изобретения является тот факт, что реализация ИВК АККОРД не накладывает никаких ограничений на выбор места установки ТБМ системы БИНОМ на объекте. В соответствии с требованиями отраслевого стандарта (ОСТ 1 00374-80 «Датчики магнитного курса. Требования к размещению на самолетах и вертолетах») в авиации существуют ограничения на выбор места установки на летательных аппаратах магнитометрических датчиков. Аналогичные ограничения существуют в морском флоте и ракетно-космической технике. Более того, для снижения уровня намагниченности плавающих аппаратов в морском флоте широко используют технологию размагничивания кораблей и подводных лодок.
В соответствии с приемами обработки магнитометрической информации (5)-(10), (40) в предлагаемом ИВК АККОРД учитывают не только магнитные и электромагнитные свойства ПО, но и погрешности сборки ТБМ и ошибки его монтажа на объекте.
В конструктивном отношении система БИНОМ, входящая в состав ИВК, может быть построена по одному из трех вариантов:
в виде единого моноблока (модуля),
в виде набора отдельных блоков,
в смешанном варианте.
Вычислитель (БЦВМ) может быть реализован по схеме встроенной в измерительный модуль конструкции или в виде отдельного вычислительного блока.
Особенность практической реализации предлагаемого изобретения заключается в том, что аппаратную часть системы выбирают исходя из конкретных требований, связанных с типом объекта, средой и условиями его применения, а достижение системой соответствующих функций обеспечивают за счет сменного универсального программно-математического обеспечения. Это означает, что предлагаемое изобретение может бытьреализовано как в существующих системах ПИОН, так и в проектируемых и перспективных разработках.
Для повышения показателей надежности, самопроверяемости, отказоустойчивости и живучести ИВК АККОРД на аппаратном уровне блоки датчиков системы БИНОМ могут быть выполнены по схемам многоосных блоков неортогональных измерителей (гироскопов, магнитометров, ньютонометров) [10].
Анализ отечественной и зарубежной научно-технической литературы, и патентных источников за последние 30 лет показывает, что альтернативы предлагаемому изобретению в настоящее время не существует, а сам предлагаемый ИВК АККОРД обладает необходимыми признаками новизны, актуальности и перспективности.
Перечень литературных и патентных источников
1. Матвеев В.В., Распопов В.Я. Основы построения бесплатформенных инерциальных навигационных систем/Под общ. ред. д.т.н. В.Я. Распопова. - СПб.: ГНЦ РФ ОАО «Концерн «ЦНИИ «Электроприбор», 2009, -280 с.
2. Ориентация и навигация подвижных объектов. Современные информационные технологии/Под общ. ред. Б.С.Алешина, К.К. Верееменко, А.И. Черноморского. -М.: Физматлит, 2006. -424 с.
3. Репников А.В., Сачков Г.П., Черноморский А.Н. Гироскопические системы: Учеб. пособие для авиац. вузов/Под ред. д.т.н.А.В. Репникова. -М.: Машиностроение, 1983. -319 с.
4. Рахтеенко Е.Р. Гироскопические системы ориентации. -М.: Машиностроение, 1989.-232 с.
5. Интегрированные системы ориентации и навигации для морских подвижных объектов/О.Н. Анучин, Г.И. Емельянцев/Под общ. ред. чл. - корр. РАН В.Г. Пешехонова. - СПб.: ЦНИИ «Электроприбор», 1999. -357 с.
6. Бортовые системы навигации и ориентации искусственных спутников Земли/О.Н. Анучин, И.Э. Комарова, Л.Ф. Порфирьев. -СПб.: ГНЦ РФ ЦНИИ «Электроприбор», 2004. -326 с.
7. Степанов О.А. Состояние, перспективы развития и применения наземных систем навигации для подвижных объектов/Гироскопия и навигация, №2, 2005, с. 95-102.
8. International Geomagnetic Reference Field IGRF WMM-20, URL: //WWW.ngdc.noaa.gov/com (дата обращения: 20.12.2021).
9. Руководство по Всемирной геодезической системе - 1984 (WGS-84)/-Международная организация гражданской авиации IKAO, изд. 2ое, 2002, DOC 9674.
10. Игнатьев А.А., Проскуряков Г.М. Гетеромагнитометрия: алгоритмы, методики, калибровки блоков магнитометров. Саратов: Изд-во Сарат.ун-та,2014. -152 с.
11. Патент RU №2757828 МПК G 05 D 1/00; G 05 В 23/00; G 06 F 11/00. Способ восстановления векторной информации в информационно-измерительных системах/авторы: Проскуряков Г.М., Голованов П.Н., Пыльский В.А./Патентообладатель -ФГБОУ ВО Сарат.госуд. техн. ун-т им. Гагарина Ю.А. от 15.12.2020, опубл. 21.10.2021, Бюлл. №30.
12. Патент RU №2523753 С1; МПК G01 С21/00. Способ персональной автономной навигации / авторы: Проскуряков Г.М., Буров А.С., опубл. 20.07.2014, дата подачи заявки 09.01.2013.
13. Проскуряков Г.М., Игнатьев А.А., Поздняков М.В. Дифференциальная геомагнитная навигация подвижных объектов / Сб. научн. трудов «Гетеромагнитная электроника» / Под ред. проф. А.В. Ляшенко. - Саратов: СГУ, 2016, вып.20.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автономной ориентации объектов в околоземном пространстве | 2022 |
|
RU2787971C1 |
| СПОСОБ АВТОНОМНОЙ ИНЕРЦИАЛЬНОЙ ОРИЕНТАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2022 |
|
RU2800846C1 |
| СПОСОБ БЕСПЛАТФОРМЕННОЙ ОРИЕНТАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2022 |
|
RU2784859C1 |
| СПОСОБ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИИ | 2022 |
|
RU2806707C1 |
| Способ восстановления векторной информации в информационно-измерительных системах | 2020 |
|
RU2757828C1 |
| СПОСОБ АВТОНОМНОЙ ОРИЕНТАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2017 |
|
RU2653967C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ УПРАВЛЯЕМЫХ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2241959C1 |
| СПОСОБ ПЕРСОНАЛЬНОЙ АВТОНОМНОЙ НАВИГАЦИИ | 2013 |
|
RU2523753C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ СМЕЩЕНИЙ ОСЕВОЙ ЛИНИИ ТРУБОПРОВОДА | 2016 |
|
RU2621219C1 |
| Способ автономной ориентации подвижного объекта с помощью инерциального измерительного модуля | 2019 |
|
RU2738342C1 |

Изобретение относится к устройствам автономной ориентации и навигации подвижных объектов. Сущность предложенного технического решения заключается в том, что корректирующая подсистема комплекса выполнена на основе бесплатформенной автономной системы ориентации и навигации, использующей информацию о геофизических полях и состоящей из трёх каналов автономной дифференциальной геомагнитной навигации и трех каналов автономной пространственной ориентации. При этом комплекс дополнительно содержит измерительный модуль, выполненный в виде измерительного блока бесплатформенной ориентации и навигации, в состав которого входят три трехосных блока датчиков первичной информации с ортогональными измерительными осями акселерометров, гироскопов, магнитометров, блок адаптации комплекса к отказам, при этом комплекс выполнен с возможностью формирования избыточной приборной информации и обеспечения шести режимов работы: штатного, двух резервно-аварийных и трех сервисных. Достигаемым техническим результатом за счет реализации предлагаемого изобретения является обеспечение отказоустойчивости комплекса. 7 ил., 8 табл.
Автономный комплекс для коррекции инерциальных систем платформенной ориентации и навигации подвижных объектов, содержащий корректируемую систему, построенную на основе использования трёхосного гиростабилизатора с гиростабилизированной платформой в трехосном подвесе и установленными на нем трехосными блоками прецизионных платформенных гироскопов и акселерометров, в котором организованы три цепи стабилизации-коррекции платформы, три канала платформенной инерциальной навигации и три канала платформенной инерциальной ориентации, корректирующую подсистему, содержащую вычислитель в виде бортовой цифровой вычислительной машины, связанные между собой с помощью электрических цепей коррекции и информационных каналов интерфейса, отличающийся тем, что корректирующая подсистема комплекса выполнена на основе бесплатформенной автономной системы ориентации и навигации, использующей информацию о геофизических полях и состоящей из трёх каналов автономной дифференциальной геомагнитной навигации и трех каналов автономной пространственной ориентации, при этом комплекс дополнительно содержит измерительный модуль, выполненный в виде измерительного блока бесплатформенной ориентации и навигации, в состав которого входят три трехосных блока датчиков первичной информации с ортогональными измерительными осями акселерометров, гироскопов, магнитометров, блок адаптации комплекса к отказам, при этом комплекс выполнен с возможностью формирования избыточной приборной информации и обеспечения шести режимов работы: штатного, двух резервно-аварийных и трех сервисных.
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ ОБЪЕКТА И БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2017 |
|
RU2661446C1 |
| Способ формирования самоорганизующейся структуры навигационного комплекса | 2016 |
|
RU2635825C1 |
| БЕЗПЛАТФОРМЕННЫЙ НАВИГАЦИОННЫЙ КОМПЛЕКС С ИНЕРЦИАЛЬНОЙ СИСТЕМОЙ ОРИЕНТАЦИИ НА "ГРУБЫХ" ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ И СПОСОБ КОРРЕКЦИИ ЕГО ИНЕРЦИАЛЬНЫХ ДАТЧИКОВ | 2014 |
|
RU2548115C1 |
| US 20170160306 A1, 08.06.2017 | |||
| US 0008311739 B2, 13.11.2012. | |||

