qoue.l
Изобретение относится к электро- технике и может быть использовано для управления шаговыми электродви- гателйми (ШЭД) с электрическим дроб- лением шага и синусно-косинусным датчиком положения на валу в системах автоматического управления и роботизированных комплексах.
Цель изобретения - повышение быст родействия и точности, а также энергетических показателей и надежности.
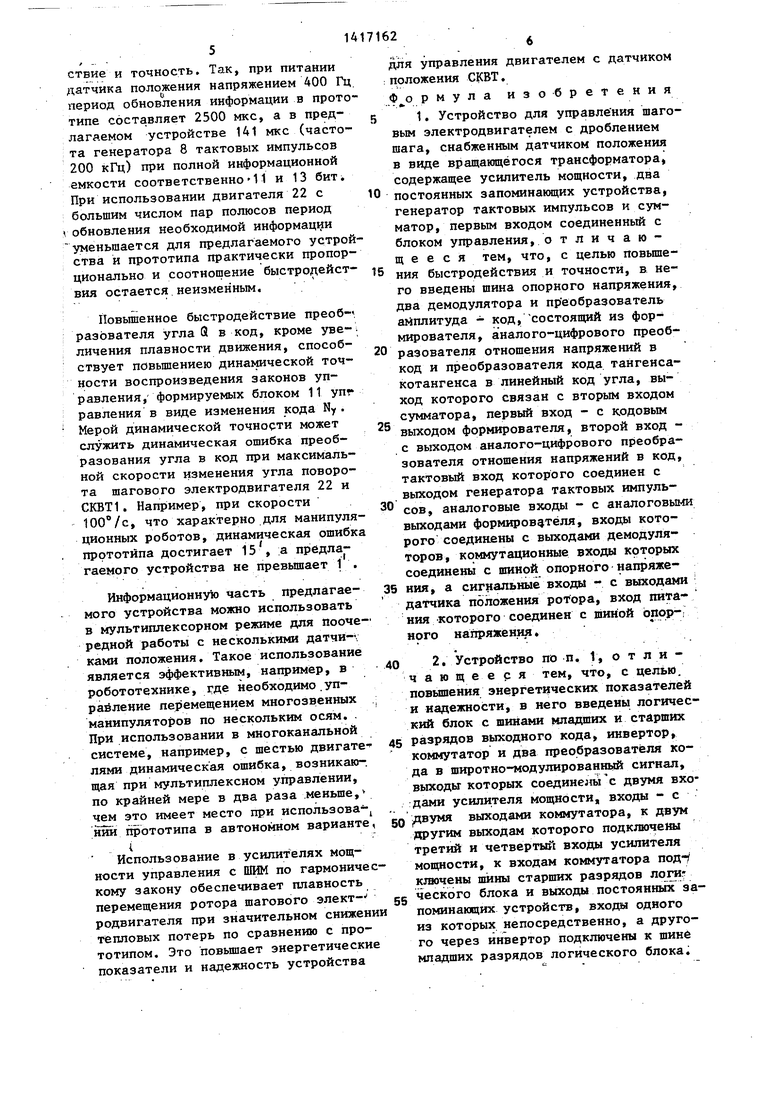
На фиг. 1 приведена структурная схема предлагаемого устройства; на фиг. 2 - диаграммы, поясняющие его работу для случая, когда датчик имеет одну, а двигатель две пары полюсов (функциональные и цифровые зависимости представлены в виде оги- баюш;их, а широтно-импульсные модули- рованные (ШИМ) сигналы - эквивалентными им напряжениями).
Устройство содержит синусно-коси- нусный вращающийся трансформатор (СКВТ) 1, шину 2 опорного сигнала Uc, подключенную к СКВТ 1, выходы которого соединены с сигнальными входами демодуляторов 3 и 4, коммутационные входы которых соединены с шиной 2, а выходы - с входами пре- образователя 5 амплитуда - код. Преобразователь 5 содержит формирователь 6, входы которого соединены с выходами демодуляторов 3 и 4, а аналоговые выходы - с входами аналого- цифрового преобразователя 7 отношения напряжения (АЦПОН), тактовый вход которого соединен с выходом генератора 8 тактовых импульсов, а выход - с вторым входом преобразова- теля 9 кода тангенса-котангенса (ПКТК) в линейный код на его выходе Первый вход ПКТК 9 связан с цифровы выходом формирователя 6, а выход, являющийся и выходом преобразовате- ля 5 - с вторым входом сумматора 10, первый вход которого соединен с выходом блока 11 управления,
Выход Сумматора 10 соединен с входом логического блока 12, выход ко- торого имеет шины старших (СВР)- 13 и младших (МВР) 14 по весу разрядов выходного кода, соотношение между которыми определяется типом используемого электродвигателя и СКВТ,
Шина СВР 13 связана с управляющим входом коммутатора 15, а шина МВР 14 - непосредственно с входом постоянного запоминающего устройства
0
5 0
0 5 0 5
л
5
(ПЗУ) 16 и через инвертор 17 с входом ПЗУ 18. Выходы ПЗУ 16 и 18 соединены через коммутатор 15 с входами преобразователей 19 и 20 код - ШИМ и усилителя 21 мощности другие входы которого связаны с выходами преобразователей 19 и 20 код - ШИМ, а выход - с фазами двигателя 22.
Демодуляторы 3 и 4 выполнены на ИМС К525ПС1 или 525ПС2.
Формирователь 6 вырабатывает трехразрядный код октанта и функции синуса и косинуса угла, приведенного к первому октанту.
В качестве АЦПОН 7 использована БИС К 572ПВ1.
ПКТК 9 выполнен на основе ПЗУ, например, БИС К505РЕ30053 и логической схемы ИСКЛЮЧАМЦЕЕ ИЛИ.
Логический блок 12 выполнен на основе логической схемы ИСКЛЮЧАЮЩЕЕ ИЛИ и регистра.
Коммутатор 15 выполнен на основе : мультиплексора или Логических элементов 2И - ИЛИ.
Устройство работает следующим образом.
В исходном состоянии на выходе блока 11 управления формируется нулевой код, т.е. NM 0.
Выходные сигналы СКВТ 1, пропорциональные синусу и UgSinQ и косинусу и UgCOsQ угла Q поворота ротора, подвергаются фазочувстви-- тельному выпрямлению с помощью демодуляторов 3 и 4, на коммутационные входы которых подается опорное напряжение Uj, с шины 2. Демодуляция выходных сигналов СКВТ 1 позволяет не только ос уществить их дальнейшее преобразование, но и снижает вредное влияние квадратурных составлякщих, присутствующих в выходном сигнале первичного преобразователя типа СКВТ 1.
С выходов демодуляторов 3 и 4 напряжения и, sinQ и и cos Q поступают на входы формирователя 6, который осуществляет инвертирование напряжений U, и U, т.е. формирование -и, и -U2 (фиг. 2). На основе фазовых и амплитудных соотношений между этими четьфьмя напряжениями он формирует трехразрядный код N. Этот код осуществляет приведение входных напряжений формирователя 6 U, и U в четные и нечетные октанты (фиг. 2), в результате чего на аналоговых в.ыхоах формирователя 6 формируются нап- ряжения U sin ии cosf), где |3 - угол поворота СКВТ1, приведенный в первый октант.g
Приведенные напряжения U, и U поступают на аналоговые входы АЦПОН7, на выходе которого формируется по методу последовательных приближений код tgp в нечетных-октантах и код 10 ctgA в четных (фиг, 2). Частота преобразования определяется частотой генератора 8 тактовых импульсов и к ее стабильности при таком.построении преобразователя 5 амплитуда - код 15 особых/ требований не предъявляется.
Полученные на выходе АЦПОН 7 коды тангенса и котангенса приведенного угла р преобразуются в линейньй код 20 угла NQ ПКТК9, на первый вход котоого поступает, код N с выхода формирователя 6, а на второй - код N-jV с выхода АЦПОН 7.
Выходной код преобразователя 5 . 25 амплитуда - код поступает на второй вход сумматора 10, на первый вход которого подается код с выхода блока 11 управления.
В исходном состоянии рассогласо- 30 вание между положением ротора двигателя 22 и полем его статора опреде- ляется статической ошибкой устройства и при отсутствии внешнего момента близко к нулю. При приложении gg внешнего момента возникае рассогласование, которое устройство стремится скомпенсировать за счет изменения синхронизирующего момента, изменяющегося в соответствии с углом поворота Q ротора СКВТ 1. В согласованном поло- ении приложенный и развиваемый двигателем моменты противоположны по знаку и равны.
приведения ротора двигателя 45 22 во вращение на первый вход сумматора 10 от блока 11 управления подают код N, отличный от нуля. Требования к величине кода Ni в предлагаемом устройстве и прототипе аналогичны и . gQ определяются условиями синхронизации ротора в пределах полюсного деления. Введение кода Nu приводит к рассинх- ронизации положения между полем статора и положением ротора, которьгй gg приходит в движение за сместившимся полем статора с целью компенсации возникшего рассогласования. Это сме- щение осуществляется за счет изменения по гармоническому закону напряжений усилителя 21 мощности.
Формирование закона ИЩМ производится посредством преобразователей 19 и 20 код - ШИМ, один из которых изменяет напряжение по закону, близкому к синусу, а другой - по закону, близкому к косинусу кода на шине 14. Функциональное преобразование этого кода производится с помощью ПЗУ 16 и 18. Адресные входы ПЗУ 16 управляются кодом шины 14, а адресные входы ПЗУ 18 - инверсными значениями этого кода (фиг. 2) на выходе логического блока 12.
Изменение кода на вьпсоде логического блока производится за счет измене ния кода N на его входе, которое связано с изменением кодов N и. на выходе блока 11 управления и N. на выходе преобразователя 5 амплитуда - код. Таким образом реализуется управляющее воздействие на двигатель 22, которьш под действием управляющих напряжений производит разворот своего ротора и ротора датчика положения СКВТ1 до тех пор, пока не произойдет эквивалентный коду поворот.
С целью экономии объема памяти ПЗУ осуществляется коммутация их выходов посредством коммутатора 15 по мере изменения цифрового эквивалента угла на их адресных входах от О до 45° и от 45° до 90°. Управление коммутатором. 15 производится от шины СВР 13 логического блока 12. Введение инвертора 17 обеспечивает необходимые функциональные зависимости на выходах ПЗУ как при возрастании, так и при убывании кода на шине 14. Такое построение позволяет, в два раза уменьшить объем памяти при неизменной информационной емкости.
Реализация такого управления позволяет получить плавное движение ротора с высокой степенью точности, которая определяется дискретностью Nq и NU.. В предлагаемом устройстве она может быть уменьшена по сравнению с прототипом не менее чем в четыре раза за счет более высокой информационной емкости преобразования угла поворота СКЕТ 1 в код.
В .отличие от прототипа это преобразование в предлагаемом устройстве осуществляется ампгитудным методом, что позволяет повысить его быстроДействие и точность. Так, при питании датчика положения напряжением 400 Гц период обновления информации в прототипе составляет 2500 икс, а в предлагаемом устройстве 141 мкс (частота генератора 8 тактовых импульсов 200 кГц) при полной информационной емкости соответственно -11 и 13 бит -. При использовании двигателя 22 с большим числом пар полюсов период обновления необходимой информации уменьшается для предлагаемого устройства и прототипа практически пропорционально и соотногиение быстродействия остается неизменным.
Повьппенное быстродействие преоб-г разователя угла Q в код, кроме уве- личения плавности движения, способствует повьшениею дина шческой точности воспроизведения законов управления, формируемых блоком 11 упг равления в виде изменения кода Ny. Мерой динамической точности может служить динамическая ошибка преобразования угла в код при максимальной скорости изменения угла поворота шагового электродвигателя 22 и СКВТ1. Например, при скорости 100°/с, что характерно для манипуля- ционных роботов, динамическая ошибка прототипа достигает 15, а предлагаемого устройства не превышает 1 .
Информационную часть предлагаемого устройства можно использовать в мультиплексорном режиме для поочередной работы с несколькими датчи-, ками положения. Такое использование является эффективным, например, в робототехнике, где необходимо.уп- райление перемещением многозвенных манипуляторов по нескольким осям. . При использовании в многоканальной системе, например, с шестью двигате лями динамическая ошибка, возникаю-, щая при мультиплексном управлении, по крайней мере в два раза .меньше, чем это имеет место при использова- НИИ прототипа в автономном варианте,
.. t
Использование в усилителях мощности управления с ПШМ по гармоническому закону обеспечивает плавность перемещения ротора шагового элект- родвигателя при значительном снижени тепловых потерь по сравнению с прототипом. Это повьш1ает энергетические показатели и надежность устройства
для управления двигателем с датчиком положения СКВТ. рмула изобретения
1. Устройство для управле ния шаговым электродвигателем с дроблением шага, снабженным датчиком положения в виде вращающегося трансформатора содержащее усилитель мощности, два постоянных запоминающих устройства, генератор тактовых импульсов и сумматор, первым входом соединенный с блоком управления, о т л и ч а ю - щ е е с я тем, что, с целью noBbmie- ния быстродействия и точности, в него введены шина опорного напряжения, два демодулятора и пр еобразователь айплитуда - код, состоящий из формирователя, аналого-цифрового преобразователя отношения напряжений в код и преобразователя кода тангенса- котангенса в линейный код угла, выход которого связан с вторым входом сумматора, первый вход - с кодовым выходом формирователя, второй вход - с выходом аналого-цифрового преобразователя отношения напряжений в код, тактовый вход которого соединен с выходом генератора тактовых импульсов, аналоговые входы - с аналоговыми выходами формирователя, входы которого соединены с выходами демодуляторов, коммутационные входы которых соединены с шиной опорного напряжения, а сигнальные входы - с выходами датчика положения ротора, вход пита- ния -которого соединен с шиной опор-, ного напряжения.
2. Устройство по п. 1, отличающее ря тем, что, с целью, повышения энергетических показателей и надежности, в него введены логический блок с шинами младших и старших разрядов выходного кода, инвертор, коммутатор и два преобразователя кода в широтно-модулированный сигнал, выходы которых соединеиь1 с двумя вхо- дами усилителя мощности, входы - с двумя выходами коммутатора, к двум другим выходам которого подключемл третий и четвертый входы усилителя мощности, к входам коммутатора под-/ к}вочены шины старших разрядов логиг ческого блока и выходы постоянных запоминающих устройств, входы одного из которых непосредственно, а другого через инвертор подключены к шине младших разрядов логического блокад
и
ппп
uuuuuuuu
ППППП
пппппппп
uuuu
ПППППППП
UUUUUUUU
ПППП,
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления шаговым электродвигателем | 1987 |
|
SU1520647A1 |
| Следящий преобразователь угла поворота вала в код | 1983 |
|
SU1116446A1 |
| Замкнутый шаговый электропривод с самокоммутацией и дроблением шага | 1988 |
|
SU1511842A1 |
| Преобразователь угла поворота вала в код | 1988 |
|
SU1690198A2 |
| Преобразователь угла поворота вала в код | 1983 |
|
SU1213543A1 |
| Устройство для измерения ошибок позиционирования шагового электродвигателя | 1990 |
|
SU1697254A1 |
| БЫСТРОДЕЙСТВУЮЩИЙ МНОГОФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД ДЛЯ УСТРОЙСТВ ЭЛЕКТРОМЕХАНОТРОНИКИ | 1994 |
|
RU2094945C1 |
| Следящий преобразователь угла поворота вала в код | 1984 |
|
SU1243092A1 |
| Преобразователь угла поворота вала в код | 1985 |
|
SU1280698A1 |
| Двухотсчетный преобразователь угла поворота вала в код | 1985 |
|
SU1269265A1 |
Изобретение относится к электротехнике и может быть использовано для управления шаговыми электродвигателями с электрическим дроблением шага и синусно-косинусным датчиком положения на валу. Цель изобретения - повьш1ение быстродействия и точности, а также энергетических показателей и надежности. С целью повышения быстродействия и точности для преобразования выпрямленных выходных сигналов датчика положения 1 используют демодуляторы 3 и 4, преобразователь амплитуда - код 5. Повышение энергетических показателей и надежности устройства достигается переводом усилителя мощности 21 в режим широтно-импульсной модуляции напряжения управления шагового электродвигателя, формируемого выходными кодами логического блока 12 и преобразуемого постоянными запоминающими устройствами, 1 з.п. ф-лы, 2 ил. 
Редактор А.Лежнина
Составитель В.Алфимов
Техред М.Ходанич. - Корректор Н.Король
Заказ 4076/55
Тираж 583
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытии 113035, Москва, Ж-35, Раушская наб., д, 4/5
Фиг. 2
Подписное
| Дуценко В.Е., Рубцов -В.П, Электропривод с шаговыми двигателями | |||
| М.: ВИНИТИ, т | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Итоги науки и техники | |||
| Устройство для управления шаговым электродвигателем | 1980 |
|
SU936340A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
