Изобретение относится к средствам высоколокального внутрисхемного контроля и измерений параметров, интегральных схем, например, лазеросканам, электронно- и ионно-лучевым диагностическим системам.
Аналогом изобретения является устройство, состоящее из зондоформирующей системы с блоком питания, объектодержателя с механизмом перемещения, генератора разверток с элементами отклонения луча, преобразователя информационного сигнала и индикаторный блок.
Недостатком аналога является сложность диагностики чипов на полупроводниковой пластине до ее разделения. Это обстоятельство обусловлено тем, что прототип не снабжен системой контроля и управления позиционированием объекта контроля.
Прототипом изобретения является устройство, состоящее из зондоформирующей системы с блоком питания, объектодержателя с механизмом перемещения и блоком управления специализированного вычислительного устройства, генератора разверток с отклоняющими катушками и блока преобразования видеосигнала.
Прототипу присущ ряд недостатков. Позиционирование объектодержателя относительно луча осуществляется механически с помощью привода. Такое позиционирование, кроме большой ошибки (порядка десятых долей мкм), характеризуется также низкой производительностью и сложностью конструктивного выполнения, требующего применения в составе прототипа сложных и дорогостоящих систем термостабилизации и устройств определения погрешности позиционирования с обратной связью. Как правило, в качестве таких датчиков используют лазерный интерферометр. Для достижения точностей позиционирования порядка десятых долей мкм прототип должен быть снабжен крайне сложным и дорогостоящим электромеханическим приводом, обеспечивающим такую точность.
Целью изобретения является повышение точности тестера и упрощение его конструкции.
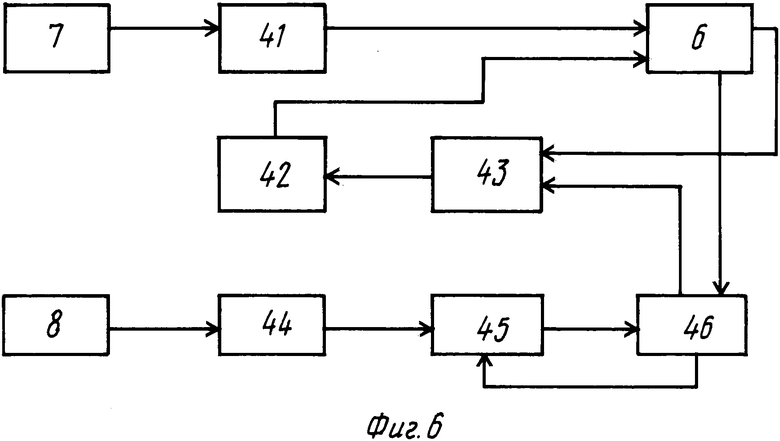
На фиг.1 приведена структурная схема лучевого тестера; на фиг.2 - структурная схема специализированного вычислительного устройства, входящего в состав тестера; на фиг. 3 - структурная схема варианта выполнения блока преобразования; на фиг.4 - структурная схема варианта выполнения блока управления устройства перемещения объектодержателя; на фиг.5 и 6 - варианты выполнения блока сравнения.
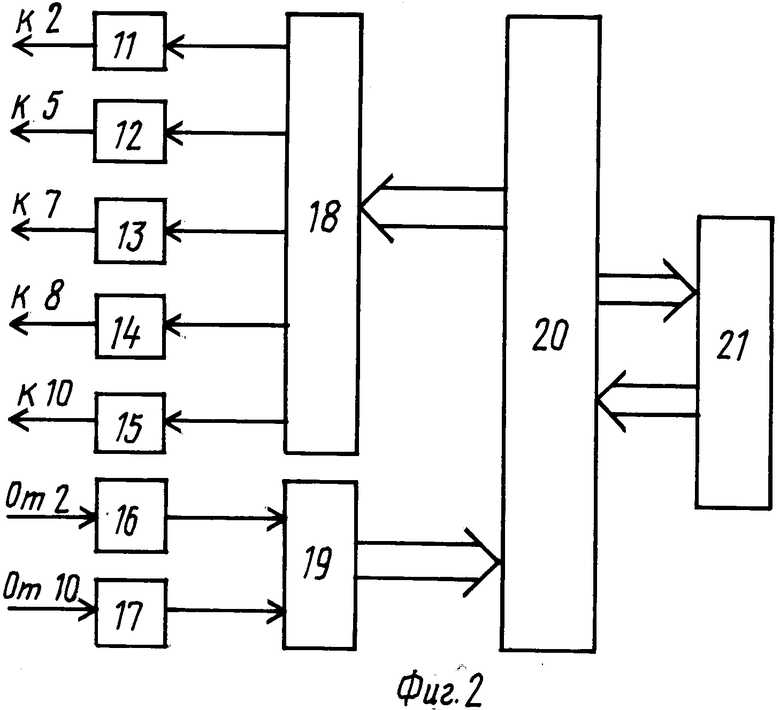
На фигурах обозначены: зондоформирующая система 1 с блоком питания 2, объектодержатель 3, механизм перемещения 4 объектодержателя 3 с блоком управления 5, специализированное вычислительное устройство (СВУ) 6, генератор разверток 7, блок преобразования видеосигнала 8, отклоняющие катушки 9, блок сравнения 10, цифроаналоговые преобразователи (ЦАП) 11-15, аналого-цифровые преобразователи 16, 17, контроллеры 18, 19, центральный процессор 20, блок внешней памяти 21, преобразователь информационного сигнала 22, управляемый блок питания 23, усилитель 24, набор корректирующих цепочек 25, умощнители 26-28, генераторы рабочих импульсов 29-31, блок контроллера корректировки 32, индикаторный кинескоп 33, растровые катушки 34, модулятор 35, источники постоянной составляющей токов 36, 37 отклоняющих катушек, компаратор 38, предусилитель 39, оконечный усилитель 40, счетчик строк 41, счетчик нулей 42, компаратор 43, аналого-цифровой преобразователь 44, блок памяти одного кадра 45, схема считывания 46.
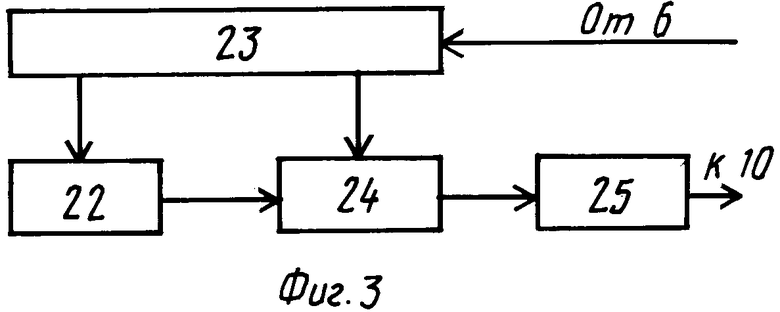
Предложенное устройство работает следующим образом: зондоформирующая система (ЗФС) 1 генерирует электронный пучок при подаче на нее питающих напряжений от блока питания 2. Этот пучок используют для зондоформирования полупроводниковой пластины, установленной на объектодержателе 3. Для установки контролируемого чипа пластины, объектодержатель 3 с помощью механизма перемещения 4 перемещают в нужное положение. Для этого на вход блока управления 5 механизма 4 подают управляющий сигнал от СВУ 6. СВУ может представлять собой набор ЦАП 11, 12, 13, 14, 15, 16, 17 контроллеров, выполняющих функции управления 18 блоками прибора и обработки текущей информации 19, центрального процессора 20 и устройства внешней памяти 21, в которой хранится эталонная топология контролируемых чипов и программы тестирования. Конструктивнo ЦАПы 11, 12, 14, 15 могут входить в состав соответственно блоков 2, 7, 10 и 5. После позиционирования объектодержателя 3 со второго и третьего выходов СВУ 6 подается сигнал на вход генератора разверток 7 и блока питания 2 ЗФС 1. При этом включается и фокусируется в плоскости объектодержателя 3 электронный пучок, который под действием сигналов, поступающих с генератора разверток 7 сканируется по поверхности объекта контроля. Возникающее при этом информационное излучение, например, поток вторичных электронов, индуционированный ток и др., с помощью блока преобразования 8 преобразуются в видеосигнал, который поступает на вход блока сравнения 10. Блок преобразования 8 может включать в себя кроме непосредственно преобразователя 22 также блок питания 23, усилитель 24 и набор корректирующих цепочек 25, например, дифференцирующих. Управляющий сигнал от СВУ 6 поступает на вход управляемого блока питания 23, который задает порог тормозного поля преобразователя 22 и/или коэффициент усиления усилителя 24. Преобразованный сигнал с выхода блока 22 через усилитель 24 поступает на блок сравнения 10 либо непосредственно, либо через корректирующую цепочку 25. При непосредственной передаче видеосигнала на блок 10 корректирующая цепочка шунтируется.
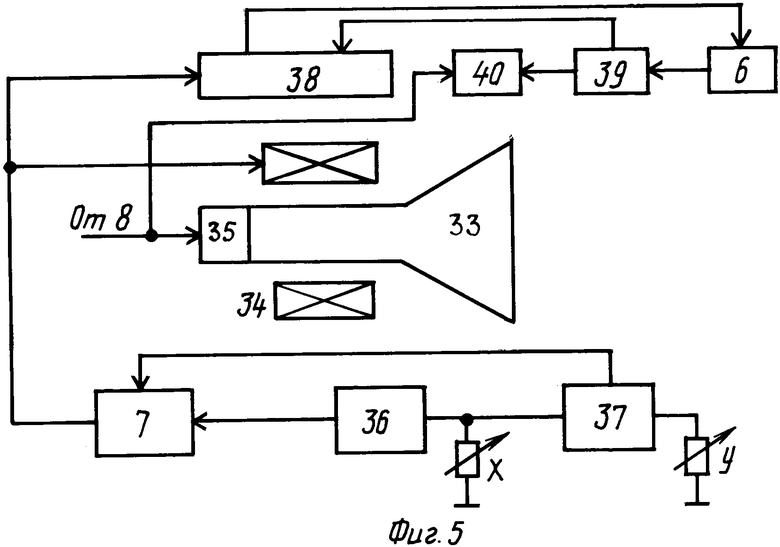
На второй вход блока сравнения 10 поступает эталонный видеосигнал тестового изображения контролируемого чипа с четвертого выхода СВУ 6. В блоке сравнения 10 происходит автоматическое или полуавтоматическое определение сдвига одного изображения относительно другого. Например, при полуавтоматическом режиме работы блок сравнения 10 может быть выполнен в виде схемы, приведенной на фиг. 5. На экране индикаторного кинескопа 33 формируется изображение реального типа (сигнал поступает на модулятор 35 от блока 8) и тестовое изображение (сигнал от СВУ 6 через предусилитель 39 и оконечный усилитель 40 поступает на модулятор 35). С помощью блоков 36 и 37, на генератор разверток подаются регулируемые постоянные токовые сигналы, обеспечивающие сдвиг поля растра по поверхности объектодержателя. То есть, используя регулировочные элементы Х и Y блоков 36 и 37, можно добиться совмещения на экране тестового и реального изображений. Соответствующие им видеосигналы поступают на входы компаратора 38, который введен для устранения органолептических ошибок совмещения, обусловленных индивидуальными особенностями зрения оператора. Амплитудное согласование видеосигналов в компараторе обеспечивается предусилителем 39, а на экран оконечным усилителем 40. При совпадении изображений соответствующий сигнал с компаратора 38 будет поступать на вход СВУ 6 в течение времени, намного превосходящего длительность развертки одной строки растра. Это состояние фиксируется СВУ 6, которое дает остановку перемещения растра и переводит тестер в режим измерения.
Описанные операции эквивалентны подаче корректирующего сигнала с выхода блока сравнения 10 на вход генератора разверток 7, который, подавая соответствующий сигнал на отклоняющие катушки 9, входящие в состав ЗФС 1, смещает электронный пучок. Аналогично при автоматическом сравнении двух видеосигналов, блок 10 вырабатывает корректирующий сигнал, который с его выхода поступает на вход генератора разверток 7. Кроме того, со второго выхода блока 10 соответствующий сигнал рассогласования подается либо на вход СВУ 6, либо на вход блока управления 5, который при переходе к следующему чипу подает соответственно меньшее или большее (скорректированное) число шаговых импульсов на механизм 4 перемещения объектодержателя 3.
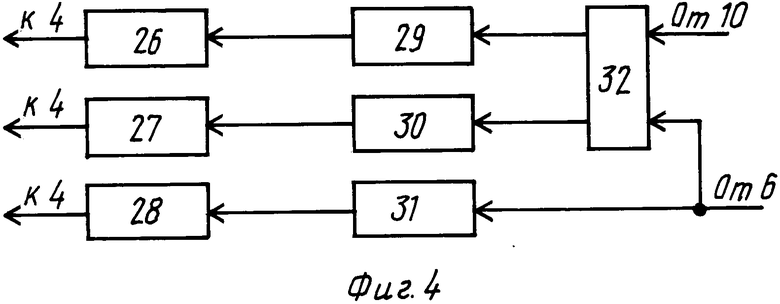
В первом варианте предусматривается традиционное выполнение блока управления 5, содержащего генераторы рабочих импульсов 29, 30, 31, которые вырабатывают под действием внешней команды шаговые импульсы для управления шаговыми двигателями (ШД), осуществляющими перемещение объектодержателя 3 по трем координатам. Для электрического согласования ШД и блоков 29-31, на выходах последних размещают умножители 26-28. В этом случае электрическая связь блоков 5 и 10 отсутствует, а корректировка числа шагов следующего перемещения осуществляется с помощью СВУ 6.
Во втором варианте выполнения блока 5, в соответствии с фиг.4 в состав блока 5 введен процессорный блок 32. Управляющий сигнал на перемещение объектодержателя 3, поступающий в блок 32, корректируется сигналом, подаваемым в него от блока 10, а объектодержатель 3 перемещают с учетом погрешности позиционирования предшествующего перемещения.
При выполнении блока сравнения 10 в соответствии с фиг.6, устройство работает следующим образом. По команде от СВУ 6 генератор разверток 7 вырабатывает сигнал сканирования n-ой строки. Возникающее при этом информационное излучение с помощью блока 8 и АЦП 44 преобразуется в цифровой видеосигнал, который в форме последовательности, состоящей из М (М - число элементов разложения строки) электрических импульсов, заносится в ячейки блока памяти одной строки 45. Далее с помощью схемы считывания 46 эти сигналы последовательно считываются из блока 45 и поступают в компаратор 43. На второй вход компаратора 43 синхронно с последовательностью импульсов реального видеосигнала от СВУ 6 поступает последовательность импульсов эталонного видеосигнала. Компаратором 43 может быть схема вычитания. На выходе компаратора размещен счетчик нулей 42, который подсчитывает число последовательно поступивших "0", возникающих при совпадении амплитуд импульсов. Если их число менее некоторого начально заданного значения io при io < M, то на устройство считывания 46 от СВУ 6 поступает сигнал и считывание, и сравнение последовательностей импульсов реального видеосигнала повторяется, начиная со второго его элемента (импульса) и так до М - iо. Если и в этом случае i < io, то для этой же строки все повторяется, но каждый следующий цикл считывания осуществляется с задержкой подачи импульсов реального видеосигнала на время, равное считыванию одного, двух и т.д. импульсов видеосигнала из блока 45. И так до M - io раз. Если и в этом случае i < io, то это говорит о том, что позиционирование осуществлено с ошибкой в направлении, совпадающем с кадровой разверткой растра. Тогда от 6 поступает сигнал на 7 и сканируется n+1 строка и операции повторяются вплоть до n+no (no не более числа строк разложения растра Np). Если и в этом случае i < io, то по сигналу от 6 генератор 7 начинает перебор строк в другую сторону, т.е. сканируются последовательно n-1; n-2; n-3 и т.д. строки с выполнением всех перечисленных выше операций. В результате будет найдена строка Nc = n+k и сдвиг строк Δ i = M - ic, при котором число последовательно поступивших на блок 42 нулей (т.е. совпадение видеосигналов) i ≥ io. Это значит, что объектодержатель 3 позиционирован с погрешностью в направлении кадровой развертки δk = k ˙ Hk/Np и в направлении строчной развертки
δc = Δ i ˙ Hc/M, где Нк и Нс - протяженность растра на поверхности тестируемого объекта в направлении кадровой и строчной разверток;
Np, M - число строк в растре и число элементов разложения строки соответственно.
Установление величин k и Δ i фиксируется СВУ 6, которое генерирует соответствующие корректирующие сигналы и подает их на блок 7 для совмещения растра с объектом контроля.
После завершения операции по точному установлению электронного пучка относительно механически позиционированного объектодержателя 3 с выхода блока сравнения 10 командный сигнал поступает на вход СВУ 6, которое, в свою очередь, запускает программу тестирования, подавая управляющие сигналы на блок питания 2 и генератор разверток 7. При этом включается пучок, который по командам с СВУ 6 облучает тестируемые участки объекта, а зарегистрированные информационные сигналы преобразуются в блоке преобразования 8 в видеосигнал, а функция преобразования последнего задается управляющей программой, заложенной в СВУ 6, для чего с выхода последнего поступает соответствующий сигнал на вход блока преобразования 8. После облучения всех заданных точек (узлов чипа) в рамках одного растра, с СВУ 6 поступает прерывающий пучок сигнал на вход блока 2 и управляющий сигнал на вход блока 5, под действием которого объектодержатель 3 перемещается в следующее положение для контроля следующего участка чипа или нового чипа.
Предложенное техническое решение позволяет исключить из состава тестера сложные и прецизионные устройства позиционирования и перемещения объектодержателя, заменив их более простыми, дешевыми и надежными элементами.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОРПУСКУЛЯРНО-ЛУЧЕВОЙ ТЕСТЕР | 1991 |
|
RU2019884C1 |
| Диодный микроскоп | 1984 |
|
SU1201919A1 |
| Способ контроля дефектов на плоской отражающей поверхности и устройство для его осуществления | 1989 |
|
SU1786406A1 |
| Сканирующее устройство для кристаллографических исследований | 1980 |
|
SU920895A1 |
| Способ микроанализа гетерофазных объектов | 1983 |
|
SU1091251A1 |
| Устройство для контроля поверхностных микропотенциалов | 1985 |
|
SU1582226A1 |
| Устройство для измерения перемещения объектов | 1982 |
|
SU1045411A1 |
| Зондоформирующая система растрового электронного микроскопа | 1983 |
|
SU1275585A1 |
| Способ настройки электронно-оптической системы растрового микрозондового прибора | 1986 |
|
SU1465922A1 |
| Устройство автоматической коррекции координатных искажений телевизионного изображения | 1981 |
|
SU1012456A1 |
Использование: в средствах высоколокального внутрисхемного контроля и измерения параметров интегральных схем, например, в лазеросканах, электронно-и ионно-лучевых диагностических системах. Сущность изобретения: тестер содержит зондоформирующую систему 1 с блоком питания 2, объектодержатель 3, механизм перемещения 4, блок управления 5, специализированное вычислительное устройство 6, генератор разверток 7, блок преобразования видеосигнала 8, отклоняющие катушки 9, блок сравнения 10. Тестер позволяет исключить из своего состава сложные прецизионные устройства позиционирования и перемещения объектодержателя, заменив их более простыми, дешевыми и надежными элементами. 5 з.п. ф-лы, 6 ил.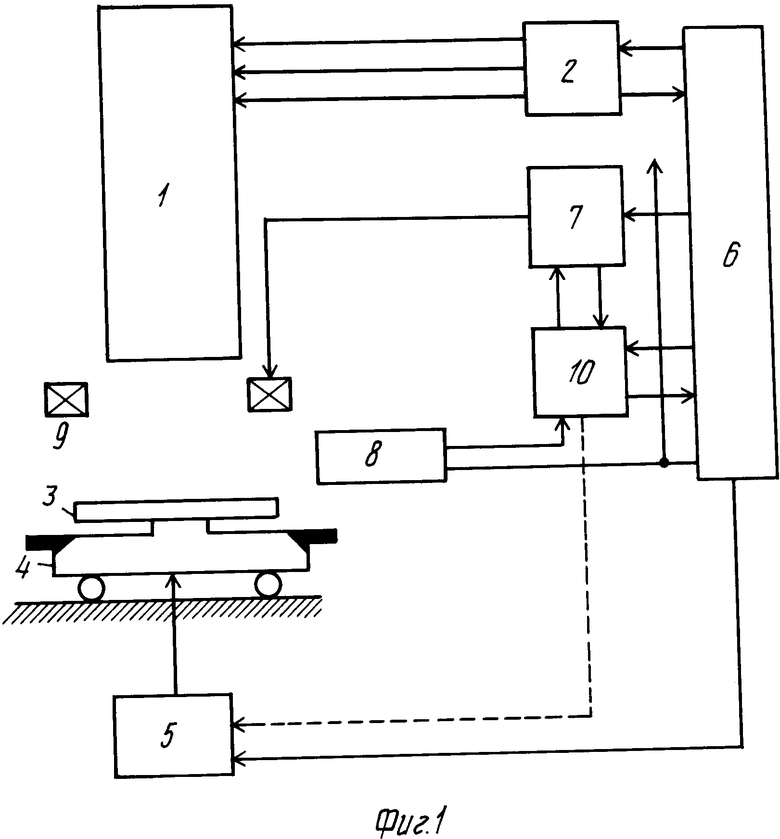
| Приспособление для остановки поезда с пути | 1924 |
|
SU950A1 |
