Изобретение относится к электродвигателям с бесконтактной коммутацией .
Цель изобретения - упрощение конструкции электродвигателя за счет устранения специального датчика положения iJOTopa
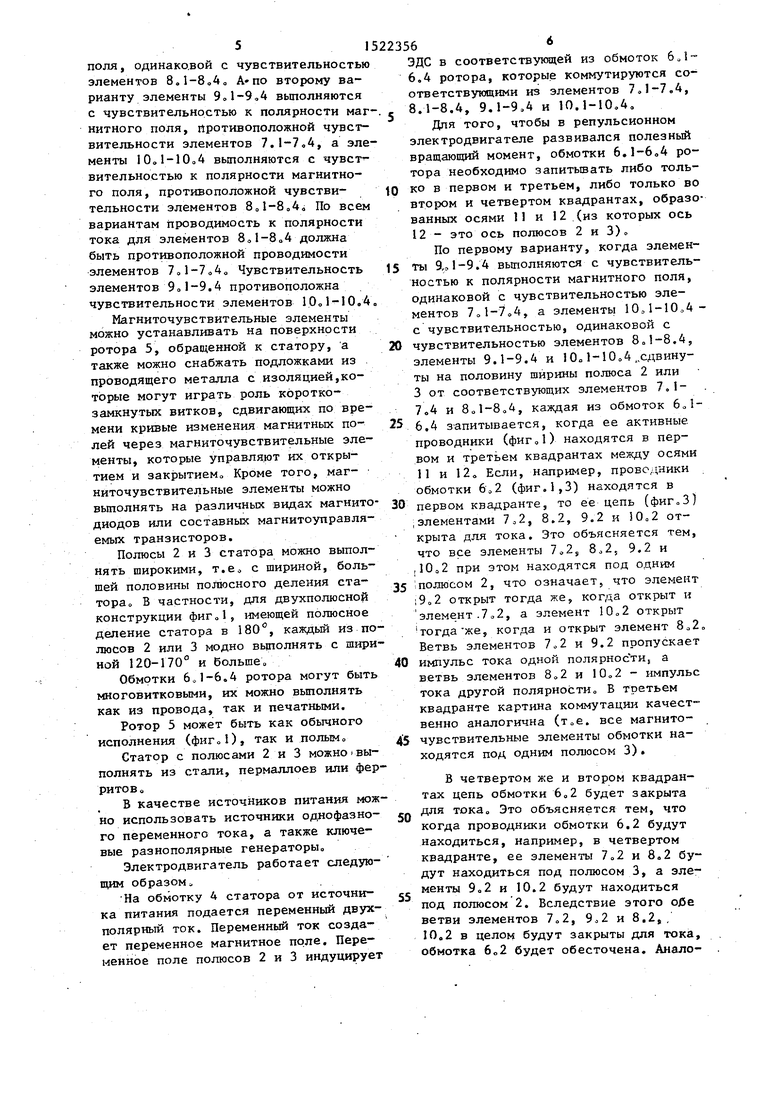
На фиго показан репульсионный электродвигатель, поперечная проекция; на фиг.2 - электрическая схема цепи первой секции обмотки ротора; на фиГвЗ то же, второй секции обмотки ротора; на фиг.4 - то же,третьей секции обмотки ротора; на фиг.5 - то же четвертой секции обмотки ротора двигателя; на фиг.6 - двигатель, продольный разрез; на фиг о 7 - обмотки и элементы ротора с соответствующими геометрическими размерами; на фиг о8 - схема с двупроводящими маг- ниточувствительными элементами.
Двигатель содержит статор 1, которой имеет полюсы 2 и 3 и однофазную обмотку А. Однофазная обмотка 4 может быть выполнена из двух половин, расположенных на полюсах 2 и 3.
Ротор 5 электродвигателя имеет обмотки .4, которые электрически одна с другой не соединены и каждая , из которых имеет диаметральный шаг. Обмотки 6.1-6.4 ротора равномерно сдвинуты одна относительно другой по окружности ротора о В частности, угол сдвига фиГо7) между осями соседних обмоток 6.1, 6.2, 6,3 и 6.4 согласно фиГо1, 7 равен 45 .
На роторе 5 установлены также первые магниточувствительные полупроводниковые элементы 7.1-7.4 и вторые магниточувствительные полупроводниковые элементы 8„1-8.4. Элементы 7.1- 7о4 и 8.1-8о4 подключены к соответствующим обмоткам 6.1-6.4 ротора .1 (фиг.2-5)о К каждой из обмоток 6.1- 6.4 подключено по одному из элементов 7,1-7.4 и 8.1-8.4, соединенных вместе разноименными выводами (направление односторонней проводимости магниточувствительных элементов на фиг.2-5 показано стрелками на данных элементах) Элементы 7.1-7.4 и 8.4 сдвинуты по окружности ротора 5 относительно осей соответствующих обмоток 6.1-6.4 ротора, с которыми они электрически соединены. В частности угол / сдвига (фиг „7) может быть рав- ньн половине полюсного деления статора (или быть близким к этому). Для
0
0
5
0
5
5
двухполюсной конструкции фиг о 1,7 угол /S сдвига (фи Го7) может быть равным 90 (или близким к нему).
Особенностью двигателя является то, что на его роторе 5 дополнительно установлены третьи магниточувствительные полупроводниковые элементы 9.1-9.4 и четвертые магниточувствительные полупроводниковые элементы 10.1-10о4о Элементы 9.1-9.4 и 10.1- 10.4, как и элементы 7„1-7„4 и 8,1- 8„4, вьшолнены. однопроводными вентильными о Каждая из обмоток 6.1-6,4 замкнута на себя через соответствую- щие из элементов 7.1-7.4, 8„1-8о4, 9.1-9о4 и iOJ-10.4.
Магниточувствительные элементы 9(, 1-9,4 и 10о1-10„4 сдвинуты по окружности ротора 5 (фиг.1, 7) относительно соответствующих элементов 7.1-7.4 и ,-с которыми очи электрически соединены„ В частности, абсолютная величина угла -у сдвига (фиг.7) каждой из пар элементов 9,1- 9.4 и 10.1-10.4 относительно соответствующей из пар элементов 7.1-7.4 и 8,1-8о4 может лежать в диапазоне от четверти полюсного деления статора до полюсного деления статора„В. указанном диапазоне угол сдвига наиболее целесообразно брать либо равным половине ширины полюса 2 или 3 статора, либо равным половине полюсного .деления статора.
Магниточувствительные элементы можно располагать парами Например, два элемента 7о1 и 8о1, соединенные
0
5
0
5
с одной обмоткой 6j.l рядом в одном месте
, располагаются (фигс 1 и 7), а
другие два элемента 9о1 и Ю, соединенные с той же обмоткой 6, располагаются рядом в другом месте (со сдвигом в -у) о Элементы 7,1 и 8„1, а также 9.1 и 8.1, 7о2 и 8о2, 9.2 и 10о2 и ТоДо могут быть вьтолнены в виде единых двухпроводящих магнито- чувствительных элементов (фиг„8)о Магниточувствительные элементы должны обладать и чувствительностью к полярности магнитного поля. По данному свойству здесь возможны два варианта. По. первому варианту элементы 9о1-9.4 выполняются с чувствительностью к полярности магнитного поля, одинаковой с элементами 7.1-7.4 (фиг.1,2-5) соответственно, элементы 10.1-10.4 вьтолняются с чувствительностью к полярности магнитного
поля, одинакавой с чувствительностью элементов 8«1-8«А., А-по второму варианту элементы 9о1-9,4 выполняются с чувствительностью к полярности маг нитного поля, противоположной чувствительности элементов 7,1-7,4, а элементы 10,1-10,4 вьтолняются с чувст вительностью к полярности магнитного поля, противоположной чувствительности элементов 8„1-8„4а По всем вариантам проводимость к полярности тока для элементов 8,1-8„4 должна быть противоположной проводимости элементов 7 ., Чувствительность элементов 9,1-9.4 противоположна чувствительности элементов 10„1-10,4
Магниточувствительные элементы можно устанавливать на поверхности
ротора 5, обращенной к статору, а также можно снабжать подложками из , проводящего металла с изоляцией,которые могут играть роль коротко- замкнутых витков, сдвигающих по времени кривые изменения магнитньпс полей через Магниточувствительные элементы, которые Управляют их открытием и закрытиемо Кроме того, Магниточувствительные элементы можно вьтолнять на различных видах магнито диодов или составных магнитоуправля- емых транзисторов.
Полюсы 2 и 3 статора можно выполнять широкими, т.во с шириной, большей половины полюсного деления статора В частности, для двухполюсной конструкции , имеющей полюсное деление статора в 180°, каждый из полюсов 2 или 3 модно вьщолнять с шириной 120-170° и больше.
Обмотки 6„1-6.4 ротора могут быть многовитковыми, их можно выполнять как из провода, так и печатными.
Ротор 5 может быть как обычного исполнения (фиг), так и полымо
Статор с полюсами 2 и 3 можно(выполнять из стали, пермаллоев или ферритов о
В качестве источников питания можно использовать источники однофазного переменного тока, а также ключевые разнополярные генераторы
Электродвигатель работает следующим образом;.
На обмотку 4 статора от источника питания подается переменный двух- полярный ток. Переменный ток создает переменное магнитное поле. Переменное поле полюсов 2 и 3 индуцирует
ЭДС в соответствующей из обмоток 6Л 6.4 ротора, которые коммутируются соответствующими из элементов 7,1-7.4, 8.1-8.4, 9.1-9,4 и 10.1-10,4,
Дпя того, чтобы в репульсионном электродвигателе развивался полезный вращающий момент, обмотки 6,1-6,4 ротора необходимо запитьтать либо толь0 ко в первом и третьем, либо только во втором и четвертом квадрантах, образованных осями 11 и 12 .(из которых ось 12 - это ось полюсов 2 и 3),
По первому варианту, когда элемен5 ты 9,01-9.4 выполняются с чувствительностью к полярности магнитного поля, одинаковой с чувствительностью элементов 7,1-7,4, а элементы 10Л-10,4- с чувствительностью, одинаковой с
0 чувствительностью элементов 8,1-8.4, элементы 9.1-9.4 и 10,1-10,4 ..сдвинуты на половину ширины полюса 2 или 3 от соответствующих элементов 7.1- 7о4 и 8,1-8,4, каждая из обмоток 6Л5 6.4 з-апитывается, когда ее активные проводники (фиг,1) находятся в первом и третьем квадрантах между осями 11 и 12, Если, например, проводники обмотки 6,2 (фиг.1,3) находятся в
0 первом квадранте, то ее цепь (фиГоЗ) .элементами 7,2, 8.2, 9.2 и 10,2 открыта для тока. Это объясняется тем, что все элементы 7,2, 8,2, 9.2 и ,10,2 при этом находятся под одним
5 полюсом 2, что означает, что элемент i9,2 открыт тогда же, когда открыт и элемент.7,2, а элемент 10,2 открыт тогда же, когда и открыт элемент 8,2, Ветвь элементов 7,2 и 9.2 пропускает
0 импульс тока одной полярнос ти, а
ветвь элементов 8,2 и 10,2 - импульс тока другой полярности, Б третьем квадранте картина коммутации качественно аналогична (т,е. все магнито5 чувствительные элементы обмотки находятся под одним полюсом 3).
В четвертом же и втором квадрантах цепь обмотки 6,2 будет закрыта для тока. Это объясняется тем, что когда проводники обмотки 6.2 будут находиться, например, в четвертом квадранте, ее элементы 7,2 и 8,2 будут находиться под полюсом 3, а элементы 9,2 и 10.2 будут находиться под полюсом 2. Вследствие этого обе ветви элементов 7,2, 9,2 и 8.2,, 10.2 в целом будут закрыты для тока, обмотка 6,2 будет обесточена. Анало- .
0
5
гично происходит и во втором квад- 1ранте, симметричном четвертому. I Таким образом, от того под одина 1КОВЫМИ или под разными полюсами статора находятся пара элементов 7„2 и 8.2 и пара элементов и 10.2, зависит и запитывание или обесточива- ние обмотки 6о2. .Аналогичное происходит и с цепями (фиго2-5) остальных из обмоток 6о1-6„4 ротора В результате, обмотки 6о1-6„4 запитываются при прохождении ими первого и третьего квадрантов между осями 11 и 12 (фигр) и развивают при этом полез- ный врап1аю1ций момент. Ротор 5 вращается в нзгжную сторону
По второму варианту, когда элементы 9о1-9о4 выполняются с чувствительностью к полярности магнитного поля, обратной по полярности к чувствительности элементов 7,1-7,4, а элементы 10с1-10о4 - с чувствительностью, обратной по полярности к чувствительности элементов .4 и элементы 9о1-9«4 и 10о1-10о4 сдвинуты от соответствующих элементов 7.1-7.4 и J8o4 на половину полюсного деления статора, из обмоток 6„1-6.4 ротора запитывается, когда ее актив- ные проводники находятся во втором и четвертом квадрантах между осями 11 и 12 (фиг.1).
В первом же и третьем квадрантах (для второго варианта) цепь каждой I из обмоток 6„1-6„4 для тока будет закрыта. Аналогичная картина наблюда- iется и в третьем квадранте, симмет- 1ричном первйму.
Электродвигатель может найти при- менение в микроприводе, например, в бытовых электроприборахь
Формула изобретения
1 о Репульсионный вентильный электродвигатель, содержащий статор, имеющий полюсы и однофазную обмотку, а также ротор, на котором расположены электрически не соединенные друг с другом секции обмотки ротора, выполненные с диаметральным шагом, которые равномерно смещены друг относительно друга по окружности ротора, на роторе установлены первые и вторые вентиль- ные магниточувствительные полупроводниковые элементы, первые и вторые магниточувствительные полупроводниковые элементы ротора подключены к
n 5 о
0
5
5
Q
соответствующим секциям обмотки ротора разноименными выводами, первые и вторые магниточувствительные полупроводниковые элементы сдвинуты по окружности ротора относительно осей, связанных с ними секций обмотки ротора, о тличающийся тем, что, с целью упрощения, он снабжен третьими и четвертыми магниточувст- вительными полупроводниковыми элементами, аналогичными первым и вторым и установленными на роторе, первые и вторые магниточувствительные полупроводниковые элементы соединены последовательно с третьими и четвертыми магниточувствительными полупроводниковыми элементами, которые подключены к соответствующим секциям обмотки ротора разноименными выводами так, что к одной секции обмотки ротора подключено по крайней -мере по одной последовательной цепочке из первого и третьего магниточувствительных полупроводниковых элементов и по одной последовательной цепочке из второго и четвертого магниточувствительных полупроводниковых элементов, третьи и четвертые магниточувствительные полупроводниковые элементы сдвинуты по окружности ротора относительно соответствующих первых и вторых магниточувствительных полупроводниковых элементов, с которыми они электрически соединены, абсолютная величина угла сдвига каждых третьего и чет- нертого магниточувствительных полу- проводниковьк элементов относительно соответствующих первого и второго магниточувствительных полупроводниковых элементов не меньше четверти полюсного деления статора и не равна полюсному шагу статора, все первые, вторые, третьи и четвертые магниточувствительные полупроводниковые элементы ротора выполнены с чувствительностью к полярности магнитного поля,,
2.Электродвигатель по По1, отличающийся тем, что абсолютная величина угла сдвига каждых третьего и четвертого магниточувстви- тельньпс полупроводниковых элементов относительно соответствующих первого и второго магниточувствительных полупроводниковых элементов равна половине .ширины полюса статора
3.Электродвигатель по п.1, о т - личающийся тем, что абсолютная величина угла сдвига ка1ждых третьего и четвертого магниточувст- вителыных полупроводниковых элементов относительно соответствукнцих пер- , його и второго магниточувствитель- ных полупроводниковых элементов равна половине полюсного деления статора.
4о Электродвигатель по п,, о т- личающийся тем, что шири- ю
на каждого из полюсов статора большое половины полнчгного деления статора.
5. Электродвигатель по п.1, о т - Личающийся тем, что первые и вторые, а также третьи и четвертые магниточувствительные элементы выполнены в виде единых двухпроводя- щих магниточувствительных элементов.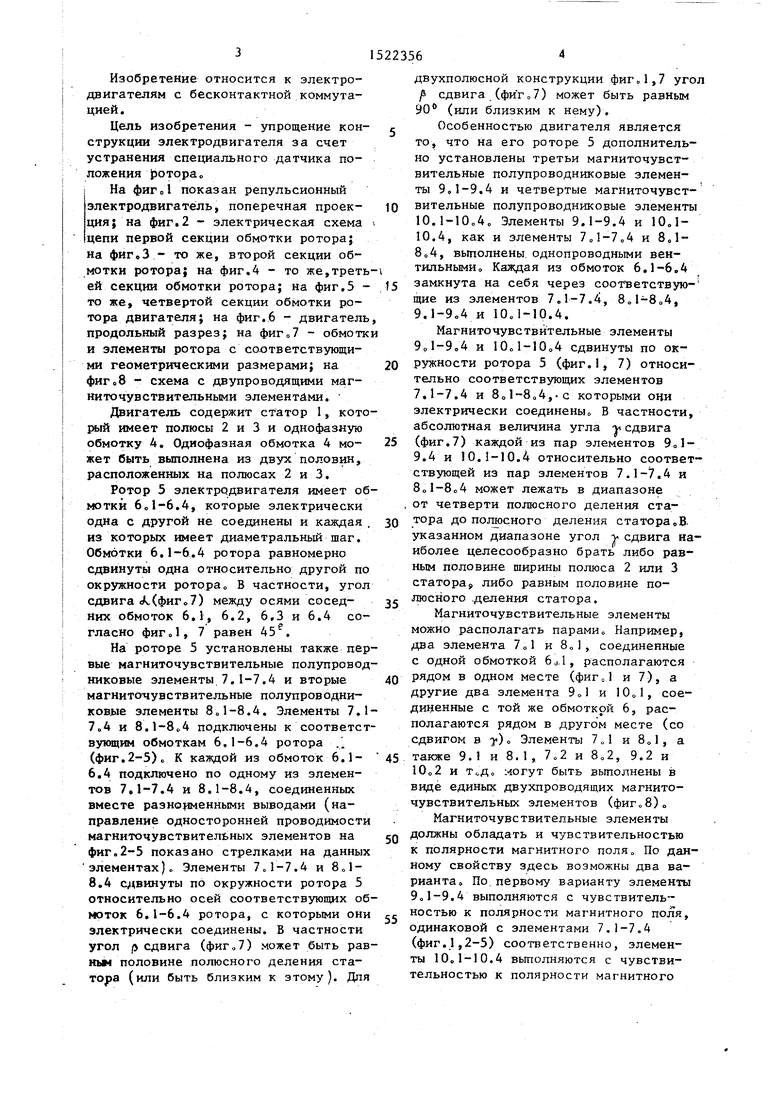
| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электродвигатель | 1986 |
|
SU1471259A1 |
| Репульсионный вентильный электродвигатель | 1986 |
|
SU1494157A1 |
| Репульсионный вентильный электродвигатель | 1987 |
|
SU1555774A1 |
| Вентильный репульсионный электродвигатель | 1988 |
|
SU1665471A1 |
| Репульсионный вентильный электродвигатель | 1988 |
|
SU1624618A1 |
| Электрическая передача электровоза | 2017 |
|
RU2674998C1 |
| Счетчик-делитель | 1988 |
|
SU1529446A1 |
| Управляемый делитель частоты следования импульсов | 1989 |
|
SU1688405A1 |
| Устройство для вычисления дискретного преобразования Фурье и свертки | 1988 |
|
SU1573459A1 |
| Двоичный счетчик | 1985 |
|
SU1272503A1 |
Изобретение относится к электродвигателям с бесконтактной коммутацией. Цель изобретения - упрощение конструкции электродвигателя за счет исключения отдельного датчика положения ротора. Репульсионный электродвигатель содержит статор 1, имеющий полюсы 2, 3 и однофазную обмотку 4, а также ротор с многофазной обмоткой, секции 6.1-6.4 которой замкнуты на магниточувствительные элементы 7.1-7.4, 8.1-8.4, 9.1-9.4 и 10.1-10.4. Элементы 7.1, 8.1, 7.2, 8.2 и т.д. образуют первые и вторые магниточувствительные элементы 9.1-9.4 и 10.1-10.4. Новым является то, что на роторе установлены третьи и четвертые магниточувствительные полупроводниковые элементы, которые соединены последовательно с соответствующими первыми вторыми магниточувствительными элементами и соответствующими секциями обмотками ротора, третьи и четвертые магниточувствительные элементы сдвинуты по окружности ротора относительно соответствующих первых и вторых магниточувствительных элементов, с которыми они электрически соединены, абсолютная величина угла сдвига каждых третьего и четвертого магниточувствительных элементов относительно соответствующих первого и второго магниточувствительных элементов не меньше четверти полюсного шага статора и может быть равна либо половине ширины полюса статора, либо половине полюсного деления статора. Ширина каждого из полюсов статора может быть больше половины полюсного шага статора. Двигатель предназначается для работы в микроприводе, например, бытовых электроприборов. 4 з.п. ф-лы.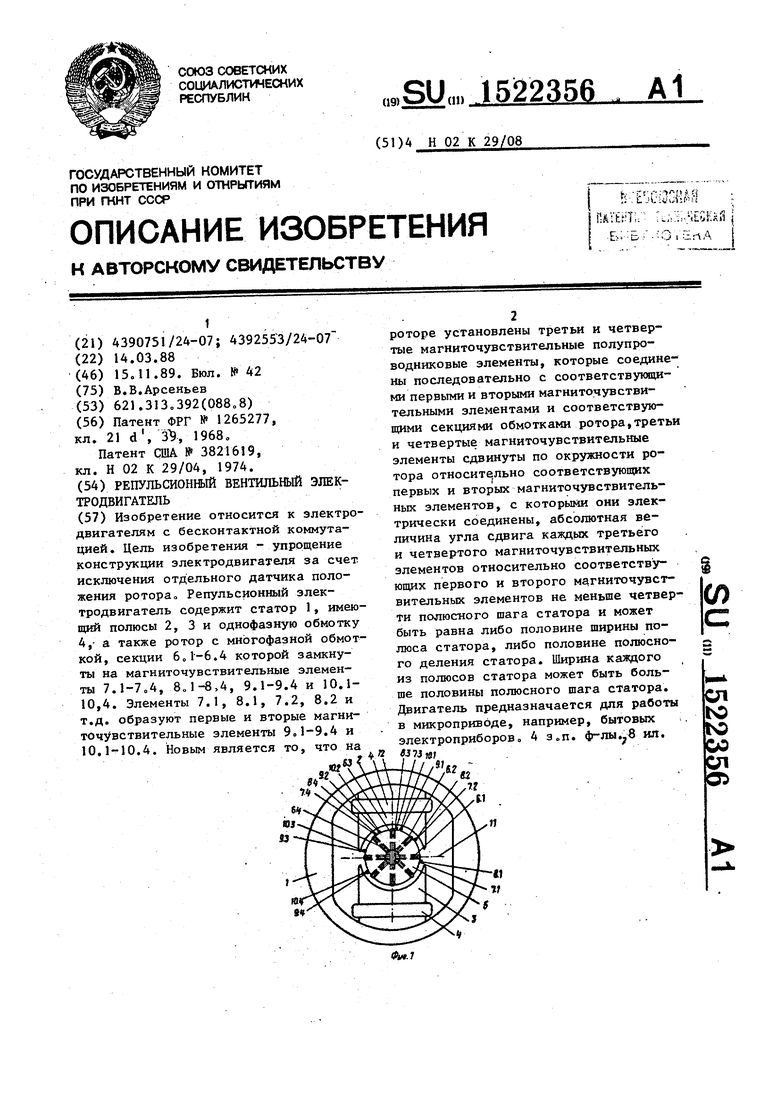
ю
А
Ю.2
6-2
В.1
Фиг, 2
Фиг.З
Фиг. 6
ш.з.
f3
в
4f
/04
и
а
а
7«
Фце,5
J5
Фие.7
(риг:8
| Секционная решетчатая башня | 1984 |
|
SU1265277A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
