(П
с

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для тренировки пловцов | 1988 |
|
SU1567228A1 |
| ЭРГОМЕТР | 1990 |
|
RU2015684C1 |
| Устройство для тренировки пловцов | 1989 |
|
SU1646560A1 |
| Устройство для тренировки пловцов | 1986 |
|
SU1378873A1 |
| Устройство для тренировки пловцов | 1988 |
|
SU1600814A1 |
| Устройство для тренировки рук пловцов | 1982 |
|
SU1085607A1 |
| Устройство для тренировки пловцов | 1979 |
|
SU874081A1 |
| Устройство для тренировки спортсменов | 1983 |
|
SU1151249A1 |
| Устройство для тренировки пловцов | 1986 |
|
SU1369733A1 |
| КРЕСЛО ОПЕРАТОРА | 1992 |
|
RU2068646C1 |
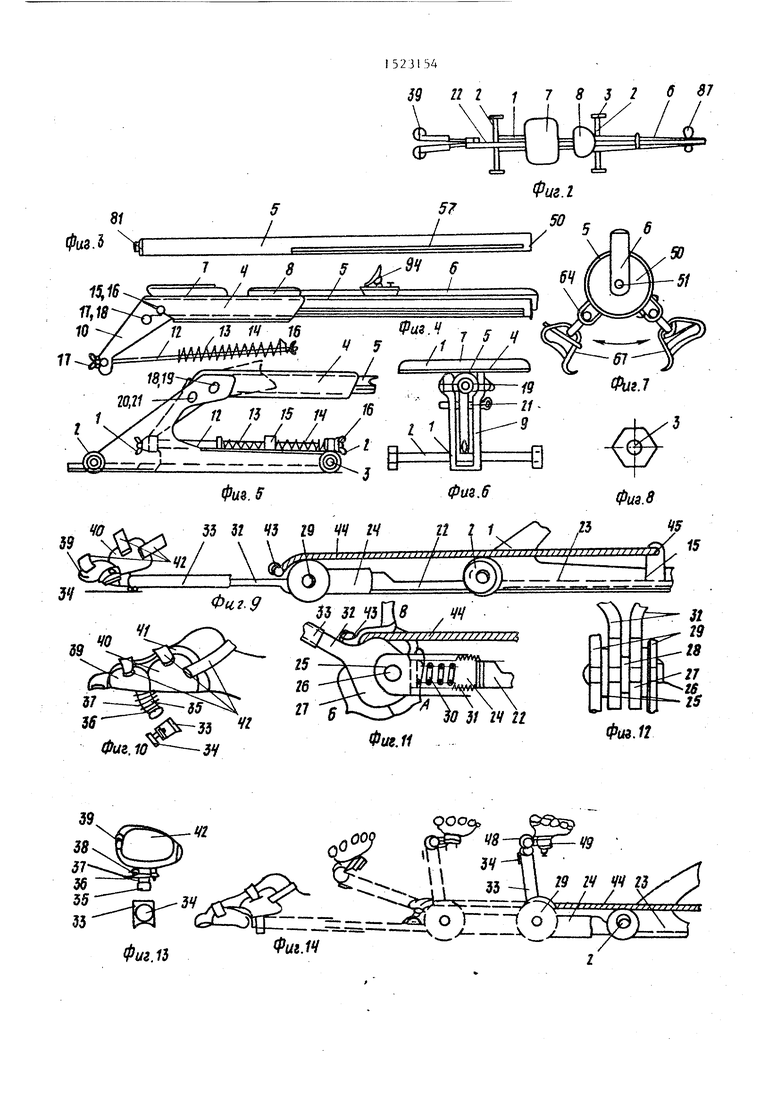
Изобретение относится к спортивному инвентарю и позволяет повысить эффективность его использования. Устройство содержит Г-образную опору 1. На ней шарнирно установлена и подпружинена обойма 4 с кронштейном 6. В обойме и кронштейне размещена с возможностью поворота труба 5. В трубе помещены направляющие и тормозные сегменты, связанные между собой амортизаторами, охватывающими блоки. Гибкие тяги с рукоятками связаны с сегментами. Держатели стоп закреплены на телескопических штангах. Штанги связаны с кулачками. Кулачки размещены в ползуне и подпружинены толкателем. 1 з.п. ф-лы, 30 ил.
И: обретение относится к спортнвтто- му гре иропочному инвентарю.
Целью изобретения является попы- шение э(1зфективиости использования.
На фиг. дано устройство, общий
вид; на фиг.;
то же, вид сверхуна фиг.З - тормозная труба нагружате- ля рук , на фиг.4 - обойма тормозной трубы с направляющим кронштейном; на фиг.5 - Г-образная основа с механизмом амортизации; на фиг.6 - то же, вид сзадиi на фиг.7 - передний торец тормозной трубы; на фиг.8 эксцентрическая гайка - опора; на фиг.9 - ножной нагружатель с выдвинутым ползуном, вид сбоку; на фиг.10 - держатель стопы ножного кагружателя; на фиг.11 - кулачковьй тормозной механизм ножного нагружателя со снятым катком; на фиг.12 - опорный каток ножного нагружателя, вид сзадиJ на фиг.13 - держатель стопы, вид сзади; на фиг.14 - ножной нагружатель при брассе; на фиг,15 - то же, вид сверху; на фиг.16 - тормозной механизм нагружателя рук, вид сбоку; на фиг.17 - тормозная труба с вырывами, вид сверху; на фиг.18 - разрез А-Л на фиг.16; на фиг.19 - разрез Б-Б на фиг.16; на фиг,2О - разрез В-В на Лиг.16; на фиг.21 - разрез Г-Г на фиг.16; на фиг.22 - тормозной сегмент вид сбоку, изнутри, на фиг. 23 - разрез Д-Д на фиг,16; на фиг.24 - тормозной сегмент с клином, вид сверху; на фиг.25 т то же, при смещении клина вправо в процессе .торможенияJ на фиг.26 - прижимные копиры сегментов, вид сбоку; на фиг.27 - то же, вид сверху, на фиг.28 - рукоятка ручного нагружателя, вид со стороны пальцев; на фиг.29- подголовник с положением головы спортсмена в пазе йа груди и пунктиром на спине; на фиг,30 - подголовник, вид спереди.
Устройство смонтировано на Г-об- разной опоре 1, покоящейся на двух опорных лагах (поперечинах) 2; передней с торцовыми эксцентрическими гайками-опорами 3 и задней, К ней щар- нирно прикреплена обойма 4 тормозной трубы 5 с направляющим кронштейном 6 на котором сверху прикреплены тазовая 7 и грудная 8 платформы, покрытые мягким материалом. Обойма помещена в вырез 9 Г-образной опоры и имеет хвостовик 10, в котором в отверстии 11 закреплен стержень 12 амортизтора . На стержень одеттл дне Г1ружи11 1: задняя - слабая 13 и , передняя - сильная 14, между которыми расположена опорная проушина 15, закрепленная на Г-образной опоре и иметощая отверстие для пропуска стержня амортизатора,На концах стержня навинчены регулировочные гайки: передняя 16 и задняя 17.
0 Спереди и сзади нижней част т Г-образной опоры имеются отверстия для помещения и закрепления опорных лаг,сверху - также два отверстия: переднее 18 для шарнирного соединения с обоймой
5 тормозной трубы посредством полуосей 19 (закрепленных на обойме) и заднее 20 для вставления стопорной гайки 21. Аналогичные отверстия для чеки имеются и в хвостовике обоймы,
0 Ножной нагружатель содержит ползун 22, помещенный в паз 23, имеющийся снизу Г-образной опоры - сзади под задним лагом. Ползун и паз имеют с.ечения в виде ласточкиного хвос5 та, что обеспечивает продольное перемещение ползуна и предотвращает его боковое смещение. На круглую заднюю часть ползуна, имеющую резьбу, навинчена обойма 24 кулачкового механиз0
5
0
5
0
5
ма, имеющая проущину 25, в которой I с помощью оси 26 помещены два тормозных кулачка 27 с шайбой 28 между ними и два опорных катка 29 по торцам оси (фиг,12), Кулачки рабочими поверхностями упираются в толкатель 30, подасатый к ним пружиной 31, упирающейся другой стороной в торец ползуна. Кулачки имеют стержни 32, на которые телескопически надеты трубки 33, к которым присоединены посредством, зажимных винтов 34 держатели стоп. Каждый держатель стопы имеет стержневую основу 35 с кольцевым пазом 36 и опорным фланцем 37, на которьй опирается пружина 38, подпирающая снизу пальцевую 39 и подъемную 40 опоры, шарнирно связанные со стержневой основой. Сверху опор наложен мягкий материал (поролон) 41, Держатели закрепляются на стопе крепежными ремнями 42,
Кривизна рабочих поверхностей кулачков имеет зону А для обеспечения динамики торможения при кроле на груди и беттерфляе (дельфине), зону Б для торможения при кроле на спине и зону В при брассе. Стержни кулачков имеют полупроушины (крюки) 43 для крепления резинового амортизатора 44,
крепящегося с другой стороны к про- ушине 45, имеющейся на опорной проушине 15 Г-образной опоры.
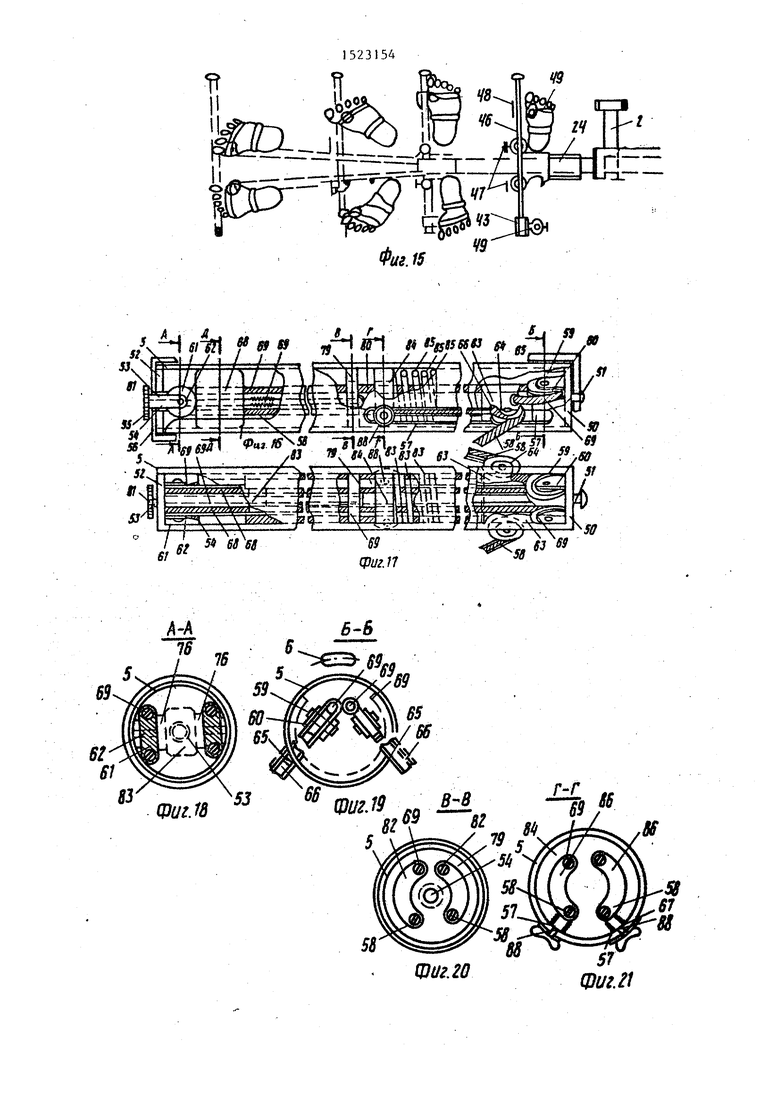
При брассе пр1тменяют корог- ысло 46, имеющее снизу по середине два пальца 47 с кольцевыми пазами, подобными пазам стержневой основы держателей, а на концах коромысла одеты с возможностью перемещения два полозка 48 с кольцевыми опорами 49, имеющими зажимные винты (не показаны) для помещения в них и фиксирования стержневой основы держателей стоп.
Ручной нагружатель имеет механизм торможения, состоящий из следующих деталей, заключенных в тормозную трубу 5, имеющую спереди переднюю крьпп- ку 50, которой она шарнирно соединена осью 51с выступом направляю1цего кронштейна. Задняя крьщ1ка 52 трубы служит опорой для ее крепления и вращения в задней части обоймы. Она имеет отверстие 53 для пропуска регулировочного винта 54, который тут же проходит через отверстие 55, имеющееся во внутреннем фланце 56 задней части обоймы и одновременно явля ется осью вращения тормозной трубы. Тормозная труба по бокам снизу имеет продольные вырезы 57, через которые пропущена гибкая тяга 58. Внутри трубы на ее крышках закреплены опорные ролики: передние 59, расположенные в своих проушинах 60 так, что их плос- kocTH совпадают с направлением на боковые вьфезы трубы (фиг.19), и задние 61, расположенные в проушинах 62, закрепленных на задней крьшке вертикально - рядом с разрывом между ними (фиг.18). В передней части тормозной трубы по бокам ее канала поме щены два направляющих сегмента 63, имеющие проушины 64 для закрепления посредством осей 65 подвижных роликов 66, помещенных вместе со своими проушинами и гибкой тягой, перекинутой через них, в вырезы тормозной трубы. Гибкая тяга 58 с внешнего конца соединена с рукояткой 67 ручного нагружателя, а внутренний ее конец пропущен через трубу и прикреп« лен к тормозному сегменту 68 в задней части трубы. Таким образом, рукоятки через гибкие тяги и подвижные ролики соединены с тормозными сегментами, которые соединены также через резиновые амортизаторы 69, перекинутые через задние,а затем
0
0
передние ролики, с направляющими сегментами 63.
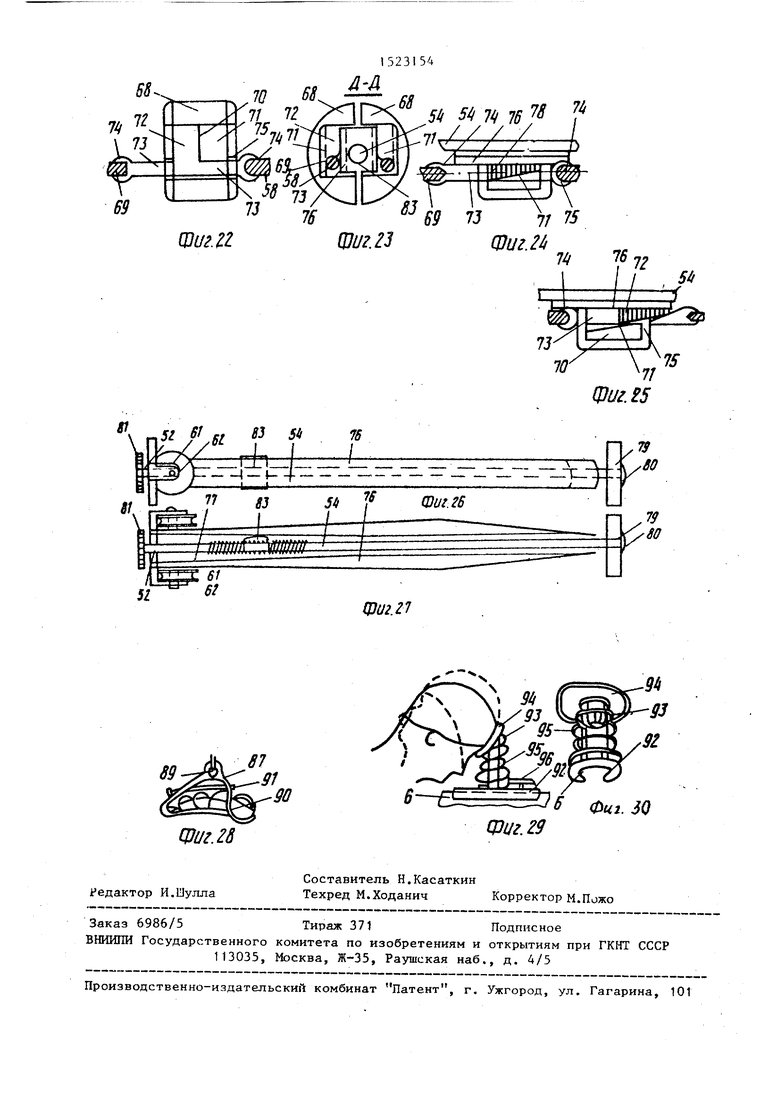
Тормозной сегмент имеет корпус с продольным пазом 70, дно которого скошено (скос 71) в сторону задней крьш1ки. На дне уложен клин 72, имеющий продольную направляющую 73 с проушинами 74 для прикрепления слева амортизатора, а справа гибкой тяги. Направляющая помещена в продольные .каналы-вырезы 75, имеющиеся в теле корпуса по бокам (фиг.22-25).Между проушинами задних роликов расположе- 5 ны два пружинных копира 76, закрепленных на задней крьшке трубы по бокам отверстия 63. Наружные поверхности пластин этих копиров криволинейны, а противоположные концы свободны. Внутренние поверхности в задних частях имеют скосы 77, расположенные в сторону задне й крышки. Каждый копир помещен в продольный паз тормозного сегмента, он служит для него 5 направляющей, что обеспечивает фиксацию сегмента от перемещений поперек трубы. На криволинейные поверхности копиров, обращенные к клиньям, опираются их контактные выступы 78, Регулировочный винт 54, помещен в отверстиях 53 и 54, а другим концом - в отверстие опорной втулки 79 и фиксируется от продольного смещения с одной стороны своей головкой 80, а с другой - закрегшенной на нем ручкой 81. Опорная втулка имеет фигурные вырезы 82 для пропуская резиновых амортизаторов и гибких тяг. Гайка 83 этого винта граненная, помещена между внутренними плоскостями копиров в зоне скосов 77 и служит распоркой для них. Далее вперед расположена опорная втулка 84 пружины 85 тормозной тру 15 (фиг. 16 и 17). Она имеет фигурные вырезы 86 для пропуска через них амортизаторов и гибких тяг. К ней прикреплена пружина 85, второй торец которой свободен, в него упираются при гребке и амортизируются направляющие сегменты 63, По бокам снизу имеютсярезьбовые отверстия 87, в которые ввинчиваются стопорные зажимные винты 88, проходящие через боковые вырезы трубы.
Рукоятки ручного нагружателя, прикрепленные к внешним концам гибких тяг, имеют дужки 89 с проушиной дпя тяги, опорные пластины 90 и резиновые амортизаторы - фиксаторы 91 кисти.
0
5
0
5
0
5
На направляющем кронштейне закреплен с возможностью продольного перемещения и фиксации подголовник, имеюпщй основу 92 со стойкой 93, проушиной своей соединенной шарнирно с проушиной корпуса 94 подголовника, покрытого сверху мягким материалом. Корпус подпружинен пружиной 95, надетой на стойку и опирающейся снизу на основу, имеющую зажимной винт 96.
Устройством пользуются в зависимости от способа плавления, подлежащего отработке, следу1ощим образом.
Работа рук. При кроле на груди пловец ложится на тазовую 7 и грудную 8 платформы, берется руками за рукоятки 67, кладет стопы ног на пальцевую 39 и подъемную 40 опоры и закрепляет их ремнем 42. Затем кладет голову лбом на подголовник 49 и работает руками, ног ами и головой так, как этого требует этот стиль плавания. При гребке рукой, например правой, пловец подает рукоятку 67 по требуемой траектории и тем самым протягивает гибкую тягу 58, Которая через блок 66 и проушину 64 перемещает вдоль продольного выреза 57 направляющий сегмент 63. Эта протяжка соответствует периоду ввода руки в воду и подтягиванию, которое имеет возрастагацую динамику нагрузки, что обеспечивается растяжением амортизационного жгута 69. Далее направляющий сегмент 63 упирается в пружину 85 опорной втулки 84 и сжимает ее. Это обеспечивает рост нагрузки, которая еще больше возрастает тогда, когда несмотря на подачу тормозного сегмента 68 влево (под действием натяжения
f
амортизационного жгута 69) этот сегмент сдвигается с места, движется вправо и набегая на кривизну фигурно поверхности копира 76, эту нагрузку еще больше увеличивает, доводя ее до . максимума на вершине крутизны копира. Это обеспечивается тем, что при натяжении гибкой тяги сначала сдвигается с места клин 68, которьй скользит по скосу сегмента вверх и прижимает его к внутренней стенке тормозной трубы. После этого тормозной сегмент - его клин 72 сходит с этой кривизны на противоположный скос, что ослабляет давление тормозного сегмента на внутреннюю стенку тормозной трубы 5 и уменьшает тормозное сопротивление, т.е. несколько снимает нагрузку. Это и есть срез - снятие нагрузки после
максимума в период окончания гребка и выноса руки из воды. При проносе руки, когда гибкая тяга ослабляется после завершения давления на рукоятку в конце гребка, оба сегмента меняют направления движения: направляющий сегмент движется вниз (вправо) по трубе, позволяя рукоятке двигаться вперед для очередного гребка, а тормозной сегмент - влево, в исходное положение. Эти движения осуществляются под действием амортизационного жгута 69, который после растяжения вновь йринимает исходное (несколько натянутое) состояние. Тормозной сегмент сопротивления этому движения не оказывает Он свободно движется влево, так как тормозные клинья 72 с движением их влево соскальзывают по скосу 71 вниз и тем самым освобождают контактные выступы 78 от соприкосновения с фигурными копирами.Таким образом, при гребке нагрузка возрастает сначала медленно, затем быстрее, достигает максимума и снимается в конце, а при переносе руки нагрузка снимается и передается на руку в значительно уменьшенном виде только за счет с1мортизации жгута.
Аналогичным образом действует и левая рукоятка, имеющая автономный тормоз, что позволяет выполнять попеременное опережающее гребковое движение руками, характерное для спортсменов высокого класса.
При кроле на спине средство для создания нагрузки на руки функционирует аналогичным образом,
При брассе и баттерфляе (дельфине) руки в отличие от кроля работают одновременно и по более короткой амплитуде. Для этого осуществляется настройка. Передвигают вперед опорную втулку 84 и устанавливают на таком расстоянии, чтобы гибкие тяги 58 смогли бы обеспечить требуемые траектории и нужное торможение без снятия рукояток 67, Для этого отвинчивают зажимные винты 88 и после установки опорной втулки 84 вновь их завинчивают. Теперь уже нарастание нагрузки и достижение ее максимума происходят при меньшей протяжке гибкой тяги, что и требуется для способа брасс и баттерфляй (дельфин). ;Тинамика же нагрузки обеспечивается так же, как и при кроле только двумя тормозными сегментами одновременно.
Регулир(вка пс. илгрузки осуществляется перемещением опорлой втулки 8А (уск(1реиие-пперед, замед- ление-иазад), а величина максимума нагрузки зависит от сшш трения между корпусом тормозного сегмента 68 и внутренней стенки тормозной трубы. При разводе фигурных копиров 76 один от другого перемещением ганки 83 вправо (увеличение нагрузки) или наоборот, движение ее влево - в сторону внутренних скосов 77 фигурных копиров (уменьшение нагрузки), достигается вращением ручки 81 регулировочного винта 54,
Работа ног при кроле на груди и баттерфляе. Гребок осуществляется движением ноги в низ, а занос ноги для гребка - движением вверх. Ноги ра ботают при кроле попеременно, а при баттерфляе (дельфине) одновременно. Усилие ноги при гребке передается через пальцевую 39 и подъемную 40 опоры на телескопическую штангу, в силу че- го стержень 32 штанги движется вниз, а кулачок 27 поворачивается на оси 26. В зоне Л рабочей поверхности кулачка происходит при этом смена длины радиуса в силу наличия криволинейност на его поверхности - радиус увеличивается и нагрузка на ногу возрастает. После достижения максимума нагрузки (на выпуклой части кулачка) нагрузка удерживается и несколько снижается до прекращения движения ног вниз.Затем при расслаблении ноги под деГтст- вием расжатия пружины 31 толкателя 30 (сжатой при гребке) штанга с опорами возвращается в исходное положение.
Аналогичным образом действует и другая нога пловца на другом держателе стопы. Для повьшения нагрузки сопротивления присоединяют дополнительно амортизационньп1 жгут 44, кото- рьй прикрепляется к крюку 43. Опорные катки 29 создают опору при гребковых движениях ног.
При кроле на спине гребок ногами осуществляется вверх. Для этого обойма 24 кулачкового механизма поворачивается вместе с катками 29 на , вращаясь на ее резьбе, и на тот же угол поворачивается трубка вместе с держателем стопы (детали 39,40,41 и др.). Теперь стопу ставят снизу дер- жателя и закрепляют ремнями так же, как и при кроле на груди. В работу здесь включается рабочая зона В, ко-
- Q f5
20 5 .д
.с
5
5
0
0
торая в силу наличия изменяющейся крутизны обеспечивает требуемую динамику нагрузки, возрастание ее при гребке и снятии ее при опускании ноги, усиление нагрузки также с помощью амортизатщонного жгута 44, который в этом случае огибает кулачки снизу.
При брассе обе ноги работают одновременно. Ноги подтягиваются в исходное положение, а затем осуществляется отталкивание. Кулачковый механизм переводят в другую зону, для чего его вновь поворачивают на 180 (в исходное положение) и затем отводят стержни 32 вправо до отказа. Вправо до отказа перемещают и ползун 22, который перемещается в пазу 23. При необходимости укорачивают также и аморти- зационньй жгут 44 (подтягивают его). Держатели стоп отсоединяют (ослабляют стопорные винты 34 и вынимают стержневые основы 35 из трубок 33) и присоединяют их к кольцевым опорам 49 полозков 48, установленных на коромысле 46, и зажимают стопорные винты кольцевых опор. Коромысло же насаживают пальцами 47 на торцы трубок 33 и закрепляют трубки стопорными винтами 34. Стопа помещается в держателе так же, как и при кроле.
При отталкивании усилие передается на держатели стоп и далее через трубки 33 на кулачки 27, которые срабатывают своей кривизной в зоне В - создают динамику нагрузки, которую можно усилить за счет амортизацион- ного жгута 44. Траектория движения строится за счет перемещения назад ползуна 22, который выдвигается из паза 23 основы 1, перекатьгоается в этом направлении, опираясь на катки 29, также за счет проворота кулачков (в зоне В), когда ход ползуна прекращается в результате натяжения амортизационного жгута 44, а движение ног назад-вниз продолжается.После отталкивания кулачко-вый механизм занимает исходное для брасса положение в силу подтягивания ног и срабатывания амортизационного жгута 44 (он после растягивания сжимается). Моделирование движения ног при брассе создается и по траектории, и по нагрузке, и по положению стоп ног. Расхождение и сведение стоп ног, требуемое при плавании брасом, обеспечивается перемещением полозков 48, насаженных на коромысло 46, удерживаемое пальцами 47 на телескопических штанг-ах держателей стоп. Так осуществляется движение ногами при брассе и других способах плавания, а усилие регулируется посредством применения и натяжения амортизационного дгута 44.
При баттерфляе (дельфине) происходит сгибание туловища в поясничном отделе позвоночника и тазобедренных JQ суставах. Это обеспечивается шарнирным присоединением обоймы 4 с Г-образной опорой 1. При баттерфляе-обязательно расстопорение обоймы, для чего вынима- JIOT чеку 21. Платформы 7 и 8 при этом 5 получают возможность качания вместе с обоймой 4 и кронштейном 6 вокруг полуосей 19. Амортизатор при этом ограни чивает и смягчает ход платформы вниз (сжимается пружина 14) и вверх (ежи- JQ мается слабая пружина 13). Амортизатор, регулируется поджатием этих пружин гайками 16 и 17. Установка устройства на плоскости опоры стабилизируется поворотами эксцентрических гаек 3, на-25 винченных на торцы передних лагов 2. Положение подголовника регулируется перемещением вперед или назад его основы 92 после освобождения зажимного винта 96. Плотность закрепления кис- ,-. ти руки В рукоятке 67 регулируется подтяжкой или ослаблением амортизатора 91.
Таким образом, все элементы устройства, обеспечивающие общепринятые способы спортивного плавания, универсаль- ны, т.е. используются для имитации гребковых движений руками, ногами, туловищем и .головой во всех указанных стилях без существенной перестройки и применения приставных элементов. Только для работы ногами при способе брасс применяется приставное коромысло. Эти особенности устройства, помимо универсальности, дают повьппение эффективности тренировки еще и за счет удобства пользования и транспортиров ки (легко разбирается и собирается,
Ю
45
5 -.
5
мало металлоемко). Устройство может быть использовано как для тренировок, так и для эргометрии пловцов, так как оно не ограничивает траектории движений и дает простор для индивидуальных особенностей техники любого пловца, позволяет импровизировать как по форме траекторий, так и по прилагаемым условиям. Формула изобретения
на ноги и руки и связанные с ними через блоки и гибкие тяги рукоятки и держатели стоп, выполненные в виде ложементов для пальцевой и подъемной частей стоп с крепежными ремнями и установленные через телескопические штанги и ползун на опоре, отличающееся тем, что, с-целью повышения эффективности использования, оно снабжено кронштейном, закрепленным на опоре перед платформами, и установленным на кронштейне подпружиненным подголовником, средство для создания нагрузки на руки включает трубу, установленную в обойме и кронштейне с возможностью поворота и имеющую продоль- ные боковые вырезы, и размещенные в трубе у ее концевых частей тормозные сегменты, связанные между собой амортизаторами, при этом блоки установлены в вьфезах передней части трубы, а гиб- . кие тяги соединены с размещенными в задней части трубы сегментами.
Фи%.5
п
Фиг.
1--W
ФигМ
(fui.l f
ф
Фиг.г
фаз.6
Фив.8
:...L
Ч
гул
30 J/ 14 It
Фиг.И
Физ. 11
49
19 14 W
/ /
/
«1
j /
/ f,. MM
7
3
trX--//.- ,/
C i a f y V / j &rfr- -.,..-. 1
Ь
Vw
v
6-6
./5
0.
5
/
.«7
/
Л7 5
v
1Г
Л7
К
8S
58 8S
Щиг.20
57
Q}Lfг.J
83 Sit
lAJL v.
MM- «-- - -A. -- - - 1-1 - -- -- - « -- -- - „л h.
89
Ц}1/г.28
/
K
ЦЗиг.П
03и г. 29
Фиг. 30
| Устройство для тренировки пловцов | 1986 |
|
SU1378873A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
