(54) УСТРОЙСТВО 1ШЯ ТРЕНИРОВКИ ПЛОВЦОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для тренировки пловцов | 1980 |
|
SU942781A1 |
| ЭРГОМЕТР | 1990 |
|
RU2015684C1 |
| Устройство для тренировки пловцов | 1986 |
|
SU1319880A1 |
| Устройство для тренировки пловцов | 1988 |
|
SU1523154A1 |
| Устройство для тренировки пловцов | 1988 |
|
SU1567228A1 |
| Устройство для тренировки пловцов | 1989 |
|
SU1646560A1 |
| Устройство для тренировки пловцов-брассистов | 1985 |
|
SU1261678A1 |
| Устройство для тренировки пловцов-брассистов | 1985 |
|
SU1313461A1 |
| Устройство для тренировки рук пловцов | 1982 |
|
SU1085607A1 |
| Лопатка цилиндрическая | 2024 |
|
RU2830688C1 |
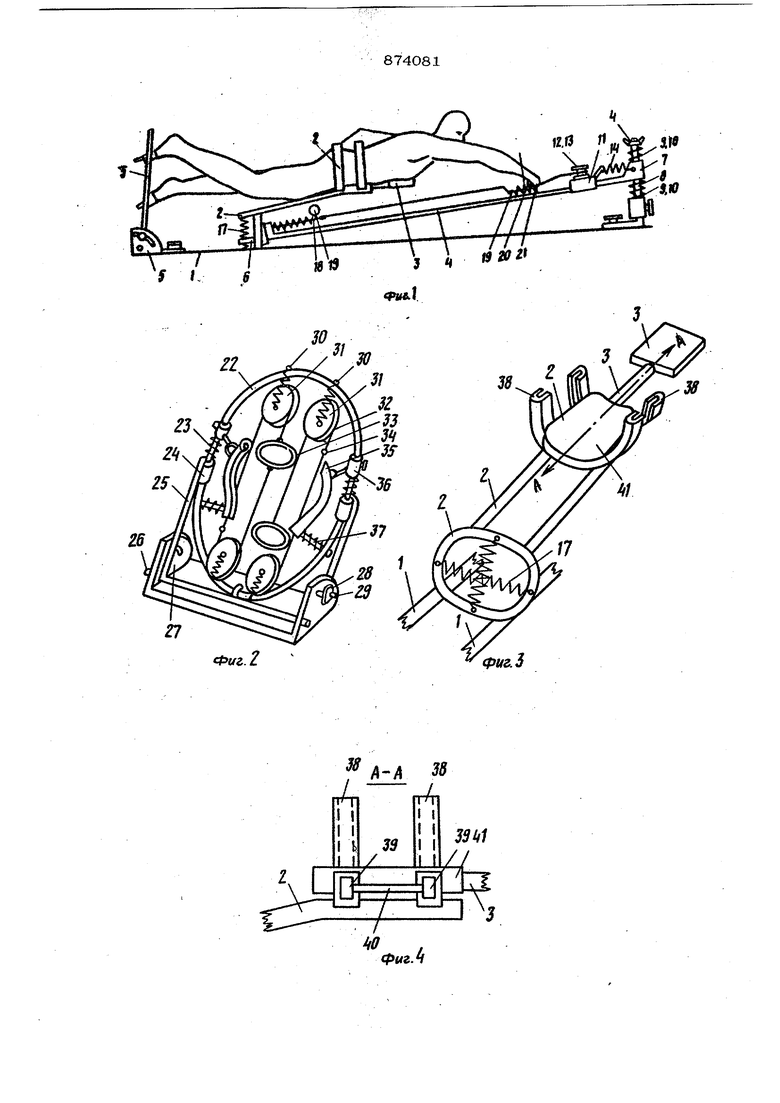
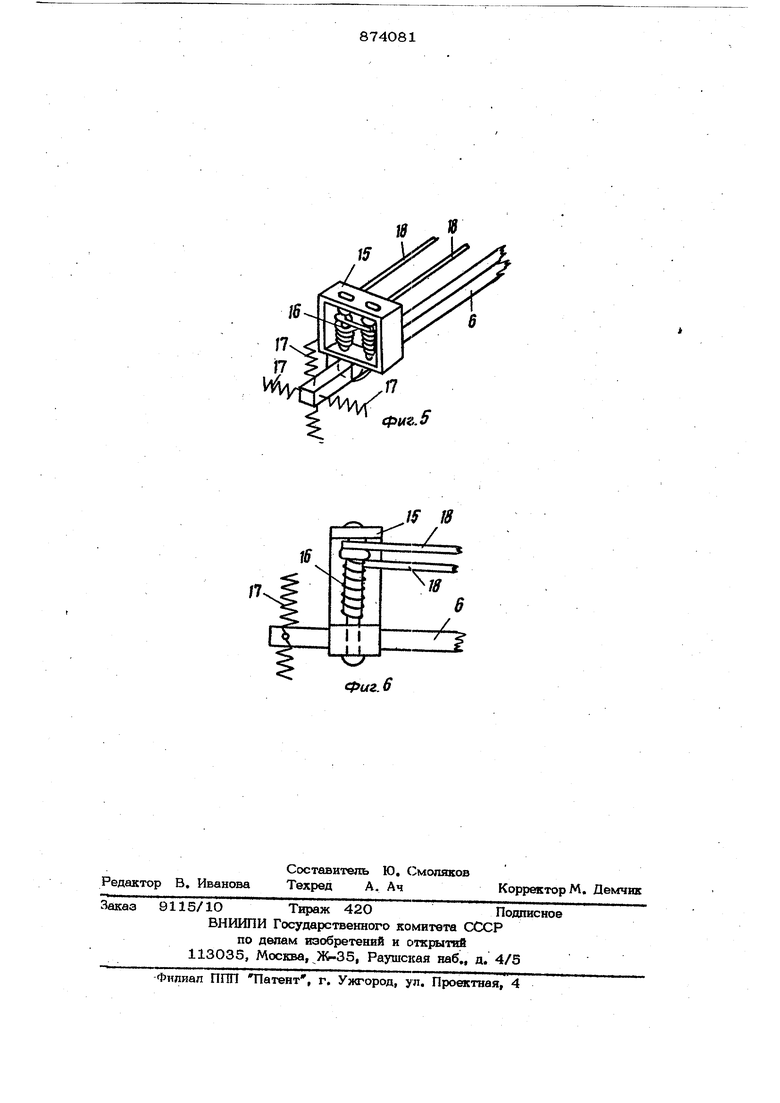
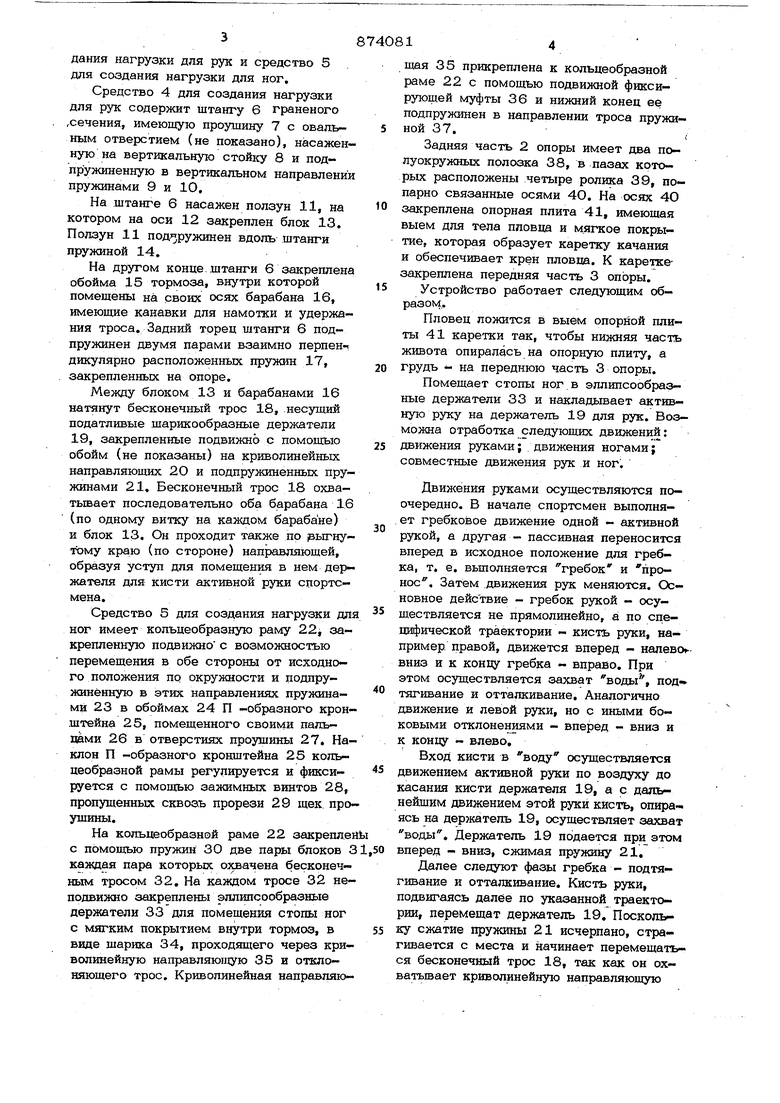
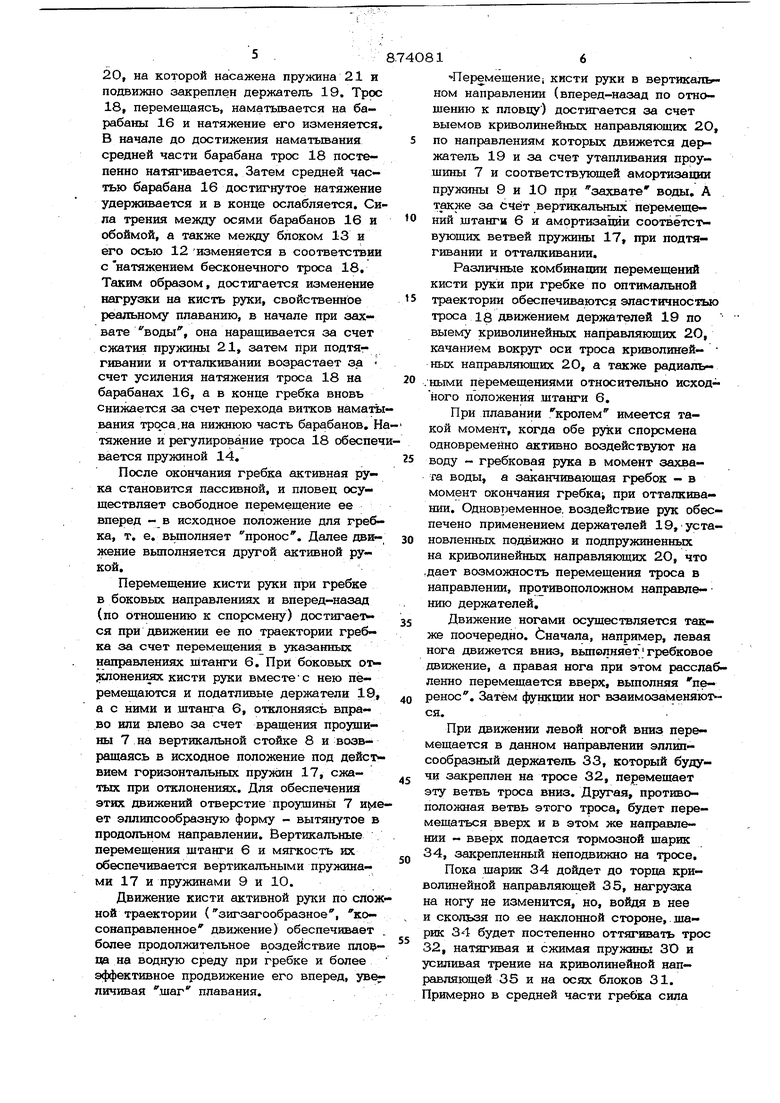
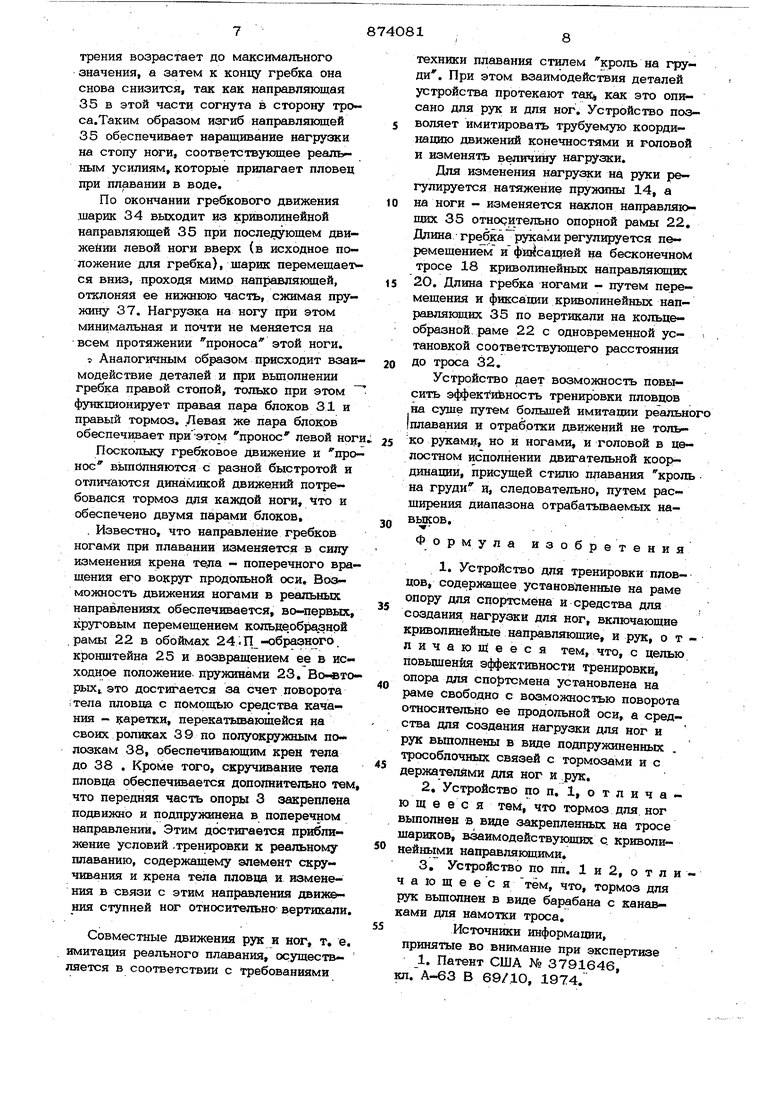
, Изобретение относится к области спорта к может быть использовано для обучения и тренировки пловцов различной квалификации. Известно устройство для тренировки пловцов, содержащее установленные на раме опору для спортсмена и средства для создания нагрузки для ног, пюе криволинейные направляющие, и pyx Недостатком известного устройства является то, что оно не обеспечивает плавательную тренировку ног и общую координацию движений при совместном действии руками и нснгами, а также праничивает крен тела пловца и позволя ёт ему полностью вовлечь в гребковые движения мощные группы мышц туловища, т, е. сужает диапазон отработанных навыков./ Цель изобретения - повышение эффективности тренировки. Цель достигается тем, что опора для спортсмена установлена на раме свободно с возможностью поворота относитель- но ее продольной оси, а средства для создания нагрузки для ног и рук |выпол- нены в виде подпружиненных трособлоч- ных связей с тормозами и с держателями для ног и рук. Тормоз для ног вьшолнен в виде закрепленных на тросе шариков, взаимодействующих с криволинейными направляющими. Тормоз для рук вьшолнен в виде барабана с канавками для намотки троса. На фиг.1 изображено устройство, общий вид; на фиг. 2 - средство для создания нагрузки для ног и его тормоз; на фиг. 3 - опора качания тела пловца в поперечном направлении; на фиг. 4 - разре А-А на фиг. 3; на фиг. 5тормоз для рук; на фиг. 6 - то же, вид сбоку. Устройство содержит раму 1, на которой смонтирована опора для расположения пловца, состоящая из задней 2 в передней 3 частей, средство 4 для созДания нагрузки для рук и средство 5 для создания нагрузки для ног. Средство 4 для создания нагрузки для рук содержит штангу 6 граненого ,сечения, имеющую проушину 7 с овальным отверстием (не показано), насаженную на вертикальную стойку 8 и подпрУжиненную в вертикальном направлении пружинами 9 и 10, На штанге 6 насажен ползун 11, на котором на оси 12 закреплен блок 13. Ползун 11 подпружинен вдоль штанги пружиной 14. На другом конце, штанги 6 закреплена обойма 15 тормоза, внутри которой помещены на своих осях барабана 16, имеющие канавки для намотки и удержания троса. Задний торец штанги 6 подпружинен двумя парами взаимно перпенч дикулярно расположенных пружин 17, . закрепленных на опоре. Между блоком 13 и барабанами 16 натянут бесконечный трос 18, несущий податливые шарикообразные держатели 19, закрепленные подвижно с помощью обойм (не показаны) на криволинейных направляющих 20 и подпружиненных пружинами 21. Бесконечный трос 18 охватьюает последовательно оба барабана 16 (по одному витку на кадщом барабане) и блок 13. Он проходит также по рьшнутому краю (по стороне) направляющей, образуя уступ для помещения в нем держателя для кисти активной руки спортсмена. Средство 5 для создания нагрузки дл ног имеет кольцеобразную раму 22, закрепленную подвижно с возможностью перемещения в обе стороны от исходного положения по окружности и подпружиненную в этих направлениях пружинами 23 в обоймах 24 П -образного крон штейна 25, помещенного своими пальцами 26 в отверстиях проушины 27. На клон П -образного кронштейна 25 кольцеобразной рамы регулируется и фиксируется с помощью зажимных винтов 28, пропущенных сквозь прорези 29 щек про ушины. На кольцеобразной раме 22 закрепле с помощью пружин 30 две пары блоков каждая пара которых охвачена бесконечным тросом 32. На каждом тросе 32 не подвижно закреплены эллипсообразные держатели 33 для помещения стопы ног с мягким покрытием внутри тормоз, в виде шарика 34, проходящего через криволинейную направляющую 35 и отклоняющего трос. Криволинейная направпяю щая 35 прикреплена к кольцеобразной раме 22 с помощью подвижной фиксирующей муфты 36 и нижний конец ее подпружинен в направлении троса пружиной 37., Задняя часть 2 опоры имеет два полуокружных полозка 38, в пазах которых расположены четыре ролика 39, попарно связанные осями 40. На осях 40 закреплена опорная плита 41, имеющая выем для тела пловца и мягкое покрытие, которая образует каретку качания и обеспечивает крен пловца. К кареткезакреплена передняя часть 3 опоры. Устройство работает следующим образом,. Пловец ложится в выем опорной плиты 41 каретки так, чтобы нижняя часть живота опиралась на опорную плиту, а грудь на переднюю часть 3 опоры. Помещает стопы ног,в эллипсообразные держатели 33 и накладывает активную руку на держатель 19 для рук. Возможна отработка следующих движений: движения руками; движения ногами; совместные движения рук и ног. Движения руками осуществляются поочередно. В начале спортсмен выполняет гребковое движение одной - активной рукой, а другая - пассивная переносится вперед в исходное положение для гребка, т. е. вьшолняется гребок и пронос. Затем .движения рук меняются. Основное действие - гребок рукой - осуществляется не прямолинейно, а по сцецифической траектории - кисть руки, например, цравой, движется вперед - налево-вниз и к концу гребка - вправо. При этом осуществляется захват , под- тягивание и отталкивание. Аналогично движение и левой руки, но с иными боковыми отклонениями - вперед - вниз и к концу - влево. Вход кисти в воду осуществляется движением активной руки по воздуху до касания кисти держателя 19, а с дальнейшим движением этой руки кисть, опираясь на держатель 19, осуществляет захват воды. Держатель 19 подается вперед - вниз, сжимая пружину 21, Далее следуют фазы гребка - подтягивание и отталкивание. Кисть руки, подвигаясь далее по указанной траектории, перемещат держатель 19, Поскольку сжатие пружины 21 исчерпано, страгивается с места и начинает перемещаться бесконечный трос 18, так как он охватьтает криволинейную направляющую 20, на которой насажена пружина 21 и подвижно закреппен держатель 19. Трос 18, перемещаясь, наматъшается на барабаны 16 и натяжение его изменяется, В начале до достижения наматьюания средней части барабана трос 18 постепенно натягивается. Затем средней частью барабана 16 достигнутое натяжение удерживается и в конце ослабляется. Си ла трения между осями барабанов 16 и обоймой, а также между блоком 13 и его осью 12 изменяется в соответствии снатяжением бесконечного троса 18. Таким образом, достигается изменение нагрузки на кисть руки, свойственное реальному плаванию, в начале при захвате воды, она наращивается за счет сжатия пружины 21, затем при подтягивании и отталкивании возрастает за v счет усиления натяжения троса 18 на барабанах 16, а в конце гребка вновь снижается за счет перехода витков наматъ вания троса,на нижнюю часть барабанов. Н тяжение и регулирование троса 18 обеспеч вается пружиной 14, После окончания гребка активная рука становится пассивной, и пловец осуществляет свободное перемещение ее вперед - в исходное положение для гребка, т. е, вьшолняет пронос. Далее движение вьшолняется другой активной рукой. Перемещение кисти руки при гребке в боковых направлениях и вперед-назад (по отношению к спорсмену) достигает ся при движении ее по траектории гребка за счет перемещения в указанных направлениях штанги 6, При боковых OD онениях кисти руки вместес нею перемещаются и податливые держатели 19, а с ними и штанга 6, отклоняясь вправо или влево за счет вращения проушины 7 на вертикальной стойке 8 и возвращаясь в исходное положение под дейст вием горизонтальных пружин 17, сжатых при отклонениях. Для обеспечения этих движений отверстие проушиноь 7 и ет эллипсообразную форму - вытянутое в продольном направлении. Вертикальные перемещения штанги 6 и мягкость их обеспечивается вертикальными пружинами 17 и пружинами 9 и 10. Движение кисти активной ру1си по слож ной траектории (зигзагообразное, ко- сонаправленное движение) обеспечивает более продолжительное воздействие плое да на водную среду при гребке и более эффективное продвижение его вперед, ув личивая шаг плавания. Перемещение; кисти руки в вертикал ном направлении (вперед-назад по отношению к пловцу) достигается за счет выемов криволинейных направляющих 2О, по направлениям которых движется держатель 19 и за счет утапливания проушины 7 и соответствующей амортизации пружины 9 и 10 при захвате воды. А также за счёт вертикальных перемещений штанги 6 и амортизации соответствующих ветвей пружины 17, при подтягивании и отталкивании. Различные комбинации перемещений кисти руки при гребке по оптимальной траектории обеспечиваются эластичностью троса 18 движением держателей 19 по выему криволинейных направляющих 2О, качанием вокруг оси троса криволиней- Hbtx направляющих 20, а также радиальными перемещениями относительно исходного положения штанги 6, При плавании кролем имеется такой момент, когда обе руки спорсмена одновременно активно воздействуют на воду - гребковая рука в момент захвата воды, а заканчивающая гребок - в момент окончания гребка при отталкивании. Одновременное, воздействие рук обеспечено применением держателей 19, установленных подвижно и подпружиненных на криволинейных направляющих 2О, что .дает возможность перемещения троса в направлении, противоположном направлению держателей. Движение ногами осуществляется также поочередно. Сначала, например, левая нога движется вниз, вьшепняет гребковое движение, а правая нога при этом расслабленно перемешается вверх, выполняя перенос. Затем функции ног взаимозаменяются. При движении левой ногой вниЗ перемещается в данном направлении эллипсообразный держатель 33, который будучи закреплен на тросе 32, перемещает эту ветвь троса вниз. Другая, противоположная ветвь этого троса, будет перемещаться вверх и в этом же направлении - вверх подается тормозной шарик 34, закрепленный неподвижно на тросе. Пока шарик 34 дойдет до торца криволинейной направляющей 35, нагрузка на ногу не изменится, но, войдя в нее и скользя по ее наклонной стороне, шарик 34 будет постепенно оттягивать трос 32, натягивая и сжимая пружины ЗО и усиливая трение на криволинейной направляющей 35 и на осях блоков 31, Примерно в средней части гребка сила
трения возрастает до максимального значения, а затем к концу гребка она снова снизится, так как направляющая 35 в этой части согнута в сторону троса.Таким образом изгиб направляющей 35 обеспечивает наращивание нагрузки на стопу ноги, соответствующее реальным усилиям, которые прилагает пловец при плавании в воде.
По окончании гребкового движения шарик 34 выходит из криволинейной направляющей 35 при после цующем движении левой ноги вверх (в исходное положение для гребка), шарик перемещает ся вниз, проходя мимо направляющей, отклоняй ее нижнюю часть, сжимая пружину 37. Нагрузка на ногу при этом минимальная и почти не меняется на всем протяжении проноса этой ноги.
т Аналогичным образом присходит взаимодействие деталей и При вьшолнении гребка правой стопой, только при этом функционирует правая пара блоков 31 и правый тормоз. Левая же пара блоков обеспечивает при этом пронос левой ног
Поскольку гребковое движейие и пронос вьшйлняются с разной быстротой и отличаются динамикой движений потребовался тормоз для каждой ноги, что и обеспечено двумя парами блоков.
. Известно, что направление гребков ногами при плавании изменяется в силу изменения крена теда - поперечного вращения его вокруг продольной оси. Возможность движения ногами в реальных направлениях обеспечивается, во-первых, круговым перемещением кольде.образнрй рамы 22 в обоймах 24-Ц -образного, кронштейна 25 и возвращением ее в исходное положение пружинами 23. Во-вторых это достигается за счет поворота ;тела пловца с помощью среде-геа качания - гсаретки, перекатывающейся на своих роликах 39 по полуокружЕаа1м полозкам 38, обеспечивающим крен тела до 38 . Кроме того, скручивание тела пловца обеспечивается дополнительно тем что передняя часть опоры 3 закреплена подвижно и подпружинена в поперечном направлении. Этим достигается приближение условий .тренировки к реальному плаванию, содержащему элемент скручивания и крена тела пловце и изменения в связи с этим направления движения ступней ног относительно вертикали.
Совместные движения рук и ног, т. е. имитация реального плавания, осуществляется в соответствии с требованиями
техники плавания стилем кроль на груди. При этом взаимодействия деталей устройства протекают так как это описано для рук и для ног. Устройство поз5 воляет имитировать трубуемую коорди- кашпо движений конечностями и головой и изменять величи1яу нагружен.
Для изменения нагрузки на руки регулируется натяжение пружины 14, а
0 на ноги - изменяется наклон направляющих 35 относительно опорной рамы 22. Длина гребка руками регулируется перемещением и фш1 сацией на бесконечном тросе 18 криволинейных направл:яющих
5 20. Длина гребка ногами - путем пе;ремещения и фиксации криволинейных направлякиянх 35 по вертикали на кольцеобразной, раме 22 с одновременной ус- i тановкой соответствующего расстояния
0 ДО троса 32.
Устройство дает возможность повысить эффектиЬность тренировки пловцов на суше путем большей имитации реального плавания и отработки движений не толь5 ко руками, но и ногами, и головой в целостном исполнении двигательной координации, присущей стилю плавания кроль на груди и, следовательно, путем расширения диапазона отрабатъшаемых наQ БЫКОВ.
Формула изобретения
3,Устройство по пп. 1 и 2, о т л и ч а ю щ е е с я тем, что, тормоз для рук вьшолнен в виде барабана с канавками для намотеи троса.
Источники информации,
принятые во внимание при экспертизе
A-A 38
±. Фиг.З
16
/7
фиг. б
