ч
7 3 10
СО
ел ел
Изобретение относится к машиностроению, конкретно к вакуумным зах-, ватам роботехнических устройств и предназначено для захвата, манипули- рования и транспортирования штучньк преимущественно с грубой и шероховатой поверхностью изделий, вьшолненных например, из керамических материалов.
Целью изобретения является-повы- шение надежности захватЬшания изделий распмрение области использования и повышение эффективности подачи жидкости в зону контакта манжеты с деталью.
На чертеже представлена конструктивная схема предлагаемого вакуумного захвата.
Захват содержит корпус 1 с закрепленной на нем уплотнитёльной эластич- ной манжетой 2, которая образует с поверхностью захватываемой детали 3 вакуумную камеру 4, соединенную с источником вакуума (не показан), При этом манжета 2 образует с корпусом 1 резервуар 5. заполненный жидкостью
6,в качестве которой может быть использована , например , вода. Резервуар 5 сообщается с поверхностью захватываемой детали 3 с помощью отверстий
7,Эти отверстия выполнены цилиндрическими и в их полости размещен капиллярно-пористый наполнитель 8, который может размещаться и на внутренней поверхности резервуара 5, Кроме того, капиллярно-пористый наполнитель может иметь два слоя 9 и 10. Причем внешний слой 10 выполняется с меньшими размерами капилляров и пор,
чем у внутреннего слоя 9. Для залив- ки жидкости 6 в резервуар 5 служит отверстие 11, закрытое при работе захвата пробкой 12, выполненной также из капиллярно-пористого MaTepnajta, Камера 4 соединяется с источником вакуума с помощью воздухопровода 13,
Предотагаемый вакуумный захват работает следующим образом.
Соединенный с источником вакуума захват опускают на поверхность транс- портируемой детали. Из полости 4, образованной манжетой 2 и поверхностью детали 3, откачивают воздух через воздухопровод 13. В результате действия разности атмосферного давления и давления в вакуумной камере 4 захват и деталь прижимаются друг к другу. При контакте манжеты с деталью за счет деформации капиллярно-пористого наполнителя происходит выдавливание .жидкости из пор, которая вытекает на поверхность детали. Вытеканию жидкости через капилляры и поры способствует также перепад давлений между вакуумной камерой 4 и резервуаром 5, который через капиллярно-пористую пробку 12 соединен с атмосферой. Вытекающая жидкость образует в зоне контакта герметизирующий микроканалы и микронеровности слой, защищающий от проникновения по ним воздуха в вакуумную камеру 4. В результате надежность работы захвата повышается. При размыкании захвата с транспортируемой деталью вытекание жидкости через капилляры и поры прекращается и жидкость удерживается в порах наполнителя 8 капиллярными и поверхностными силами.
При работе захвата; с произвольно ориентированными в пространстве деталями при неполностью заполненном жидкостью 6 резервуаре 5 жидкость мо i жет не касаться капиллярно-пористого .наполнителя 8 и, следовательно, не поступать в зону контакта манжеты с деталью, В этом случае для подачи жидкости 6 к наполнителю 8 в отверстиях 7 и далее в зону контакта на внутренней поверхности резервуара 5 также размещен слой капиллярно-пористого наполнителя 8, Под действием капиллярных сил жидкость из резервуара 5 по слою капиллярно-пористого наполнителя 8, находящегося на внутренней поверхности резервуара 5, подается к наполнителю 8, находящемуся в отверстиях 7,
Таким образом, подача жидкости в зону контакта манжеты с деталью обепечивается при любом положении захвата и детали, что расширяет область использования предлагаемого захвата. Это свойство особенно важно при использовании захвата в роботехнике, где манипулирование деталями происходит по сложной пространственней траектории с многочисленным изменением их положения, что требует непрерывной подачи герметизирующей жидкости в зону контакта в любых положе ниях захвата,
Дпя повышения эффективности работы захвата путем увеличения эффективности подачи жидкости в зону контакта манжеты с деталью капиллярно-пористый наполнитель имеет два слоя 9 и.
10, причем внешний слой 10 выполнен с меньшими размерами капилляров и пор. Капиллярные силы перемещают жидкость в направлении к слою с более мелкими капиллярами и порами, поэтому внутренние потоки жидкости направлены к внешнему слою 10, т.е. в зону контакта манжеты с деталью.
Дпя устранения образования воздушной пружины при перемещениях свободной поверхности жидкости 6 в резервуаре 5 служит пробка 12, выполненная из капиллярно-пористого материала. ПробХа 12 позволяет свободно прохо- дить воздуху в резервуар 5 и одновременно препятствует вытеканию жидкости из резервуара при любом положении захвата. Формула изобретения
1. Вакуумный захват, содержащий корпус с закрепленной на нем уплотнительной манжетой, образующей с поверхностью детали вакуумную камеру, а с корпусом - резервуар, заполненный жидкостью и сообщенный с рабочей поверхностью манжеты через вьтолненные в ней отверстия, отличающий- с я тем, что, с целью расширения области использования, отверстия в манжете выполнены цилиндрическими, а в их полости и на поверхности корпуса, образующей резервуар, размещен капиллярно-пористый наполнитель.
2. Захват по п. 1, отличающийся тем, что, с целью повышения эффективности подачи жидкости в зону контакта манжеты с деталью, капиллярно-пористый наполнитель в отверстиях манжеты вьтолнен двухслойным, внешний слой которого имеет меньшие размеры капилляров и пор, чем внутренний слой.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ ЗАМОРОЖЕННЫХ ГРАНУЛ ЖИДКОСТИ В ВАКУУМЕ | 1991 |
|
RU2017052C1 |
| ВАКУУМНЫЙ ЗАХВАТ | 1993 |
|
RU2035376C1 |
| Вакуумный захват (его варианты) | 1984 |
|
SU1201214A1 |
| ПРОТОЧНЫЙ ВСПОМОГАТЕЛЬНЫЙ ЭЛЕКТРОД (ВАРИАНТЫ) | 2014 |
|
RU2548133C1 |
| АНАЛИЗЫ | 2009 |
|
RU2521639C2 |
| ВАКУУМНЫЙ ЗАХВАТ | 1992 |
|
RU2050255C1 |
| АВТОРУЧКА | 2005 |
|
RU2283778C1 |
| ПОРИСТЫЙ ЭЛЕМЕНТ ДЛЯ СИСТЕМЫ ПРЕДОСТАВЛЕНИЯ ПАРА | 2020 |
|
RU2828025C2 |
| Вакуумное захватное устройство | 1989 |
|
SU1723003A1 |
| ТЕПЛОТРУБНАЯ ХОЛОДИЛЬНАЯ МАШИНА | 2005 |
|
RU2283461C1 |
Изобретение относится к машиностроению, конкретно к вакуумным захватам робототехнических устройств, и предназначено для захвата, манипулирования и транспортирования штучных, преимущественно с грубой и шероховатой поверхностью изделий, выполненных, например, из керамических материалов. Изобретение позволяет расширить область использования. Это достигается благодаря применению капиллярно-пористого наполнителя. Предлагаемый захват содержит корпус 1 с закрепленной на нем уплотнительной эластичной манжетой 2. Манжета 2 образует с поверхностью захватываемой детали 3 вакуумную камеру 4. При этом манжета 2 образует с корпусом 1 резервуар 5, заполненный жидкостью 6. Резервуар 5 сообщается с поверхностью захватываемой детали 3 с помощью отверстий 7. В полости отверстий размещен капиллярно-пористый наполнитель 8, который может размещаться и на внутренней поверхности резервуара 5. Капиллярно-пористый наполнитель может иметь два слоя 9 и 10. Причем внешний слой 9 выполняется с капиллярами и порами меньшего размера, чем внутренний слой. Отверстие 11 служит для заливки жидкости 6 в резервуар 5 и закрыто при работе захвата пробкой 12 из капиллярно-пористого материала. Камера 4 соединяется с источником вакуума посредством воздухопровода 13. 1 ил.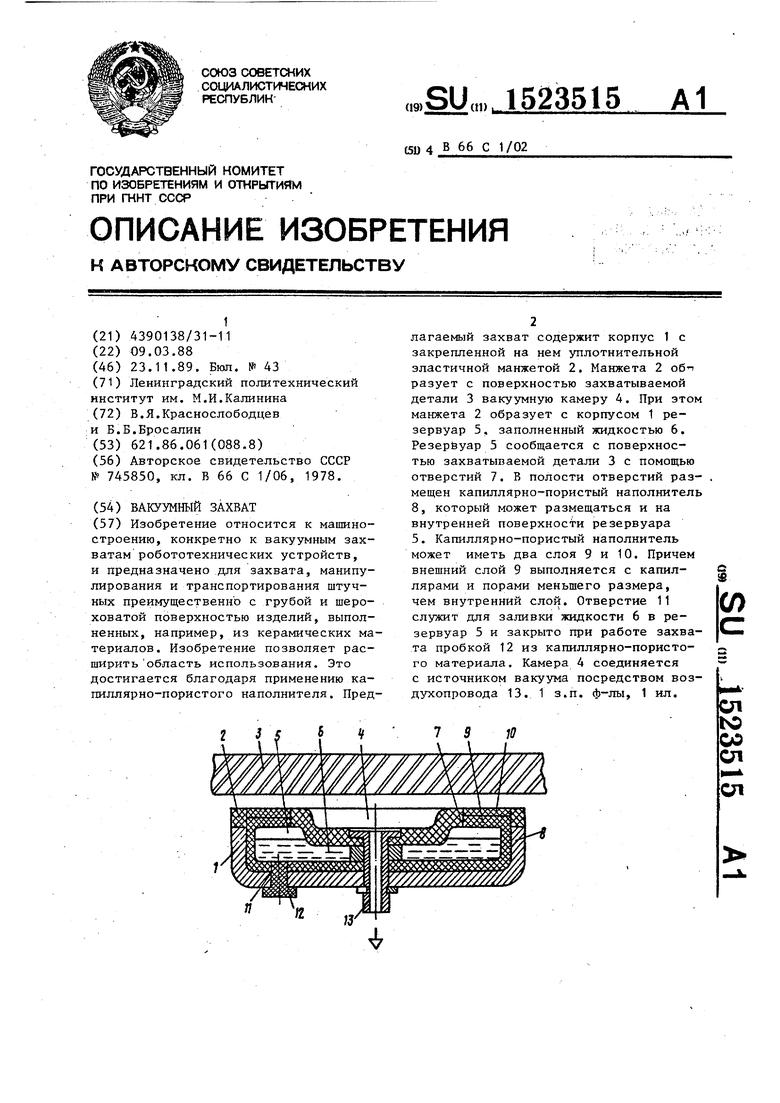
| Вакуумный захват | 1978 |
|
SU745850A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
