1 Гюпретение относится к горной промыш- .Ч нчпсти. в частности к устройствам для yii|i;iB,ieHHH перемещением горных комбай- HiMi. работающих нреимущественно на поло- гр. и наклонных нластах.
Цель изобретения - повышение надеж- носги раГ)от1.1 комбайна на нологих и наклонных пластах при аварийных ситуациях.
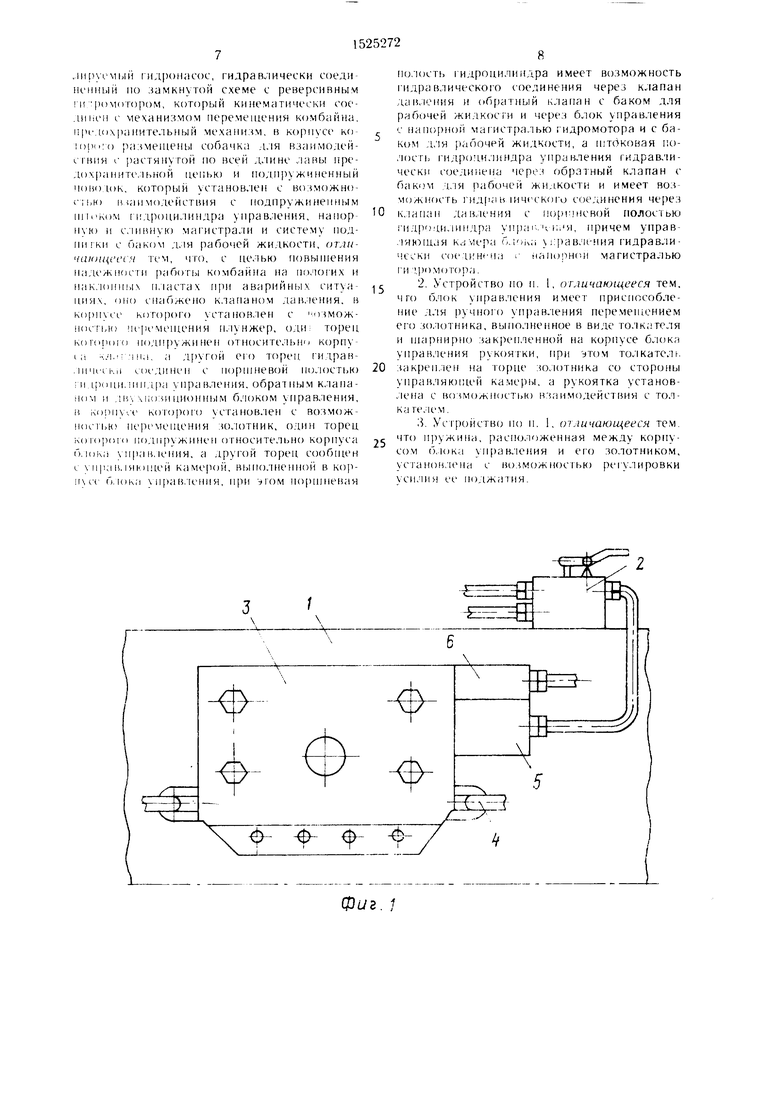
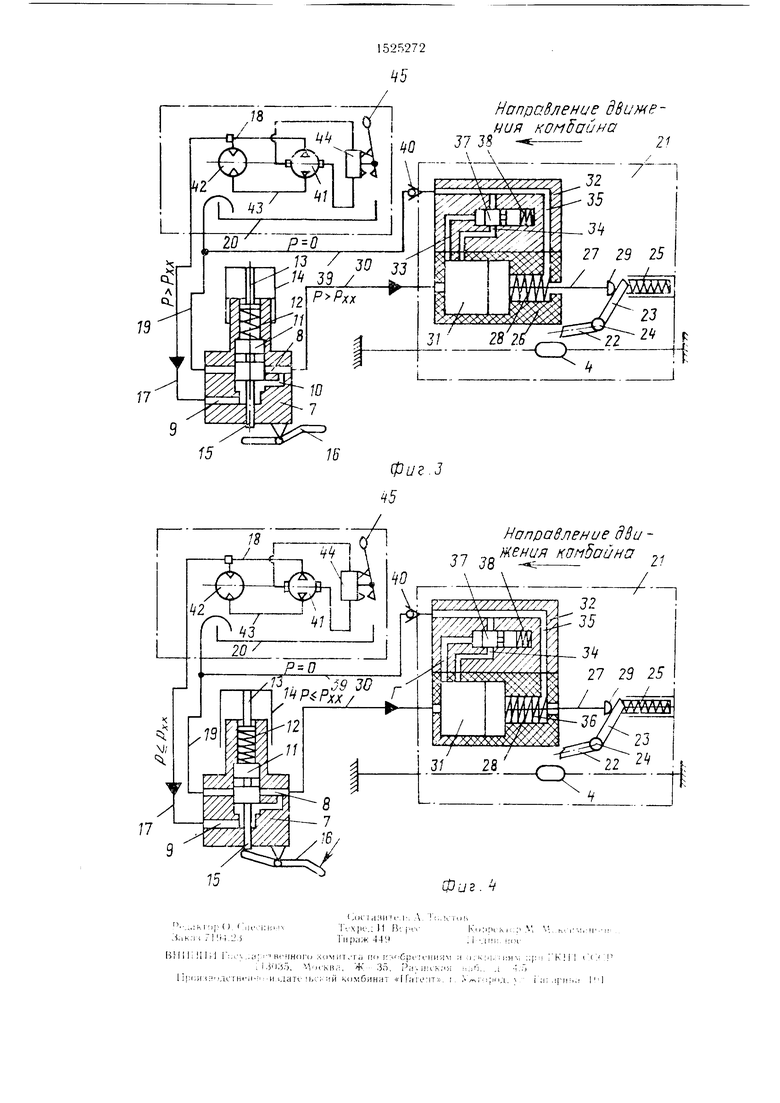
На фиг. 1 изображено устройство для управления перемещением горного комбайна, общий вид; на фи1 . 2 гидрокинематическая схема устройства при движении комбайна 1 нап)а14.1епии снизу вверх и при остановках KoM6;jihia, на фиг. 3 то же, при движении комбайна в направлении сверху BHiii под ;1а пзкой; па (})иг. 4 то же, при холостом ме()сго11е комбайна в па1 рааленни сверху вни i.
N ci )(1(|. ГВ1) .Ч.1Я управления перемепц ни- горпоп комбайна состоит из зак)енлеп- пых на кп) 1 комбайна двухнозинноннс.)- го б,1ока 2 ун)авления, нредохрапительног( механи.та 3, неподвижной предохраните-П - iioii цени 4, растянутой по всей длине лавы и п|) lioii через отверстие в предохраните,.Н(П1 механизме .3, и закрепленного на пред()Х1)ани гельном механиз.ме 3 гидроци ,1ипд1)а ,) чправ.чения с установленным па нем к, 1апаном 6 давления.
Лнухп().)И1и1онный блок 2 ун)авления включаег и себя корпус 7, с каналами 8, 9 с управ, 1як)П1е11 камерой 10. золотник 11. пру- жппу Г2 .«),1отника, }1. |унжер 13 регулировки yciLini сжатия пружины. ре1 улировоч- ганку 1-1, приспособление для ручного у npaii. перемеп1епнем золотником И с го, ie,ifM lo п 1па|1нирно закреп.тенпую па к(.) 7 |)укоя1к 16, магистраль 17,, 1 оедц 1 :().1 вход капа,1а 9с напорной ма- r lCTpa/ii.K) i 1 идр()П|1овода механи.зма перемещения iNdMoaiina, и с, .магист); ,. :ь li), |.|)с;п1 fiHKJiuyK) (1Д капа,) М с бако.м 2(1 мя )аГ)()че-1| жидкосги, вхо:1япи1М в систему пплпггки I не показана) гид опрпвода.
11ред()Х)ан1Гге,тьный механизм ;5 включает в себя корпус 21. И1арни)но 3aKpeii.ien- ;| К) iViiyrpn корпуса 21 собачку 22, выпол- пеппук) заодно с понодком 23 и осью 24 собачки, и 25, в.и1имодействукмц К) с поводком 23 собачки и n|v,fжимаюп1ую собачку 22 к 11редохраните, 1ьпой цепи 4.
Гп. а)(111||, Г) включает в себ:- корпус 2(|. пггок 27. )) п Л Жину 2S, нзаимо- U4U TBVK)) с iiofio iKOM 23 собачки 22, го- 1|;вк 29 пп ока и ма| исг)аль 30, с оедн- пяюшую по)|пнев ю по. юсть 31 ги;1.ропи.типл- jui .) с вьгходом , ia 8.
Н да,1епия вк. 1ючаст ь себя .с 32 с рас1и,1ожепп1 1ми в нем кана, 1ами
3.3 ЗГ), с()с. 1нпя101Ц11Ми поршневую 3 1 и пп о. , i(i по. 1(сти | идрО1и1, 1индра о, н,
i7. г ружнпу 38 п, 1унже|)а и ма1Ч(стр а,1ь 39
(1П 1а-1-и; ; клапаном 40. соединяющую выsD.i K,iH, i.ia . (.4) с. швпой магисгра, 1ью 19.
0
5
0
5
0
5
5
Гидрон1)ивод механизма перемещения комбайна вк.чючает в себя регу. :ируемый гидронасос 41, )ене|1сивный гидромогср 42, гидрав;1ически соелипенные межд собой пс .а.мкнутой схеме напорными магиспраля- ми 18 и 4,3, нм у.чятор 44 скорости перемещения KOM6ai iia и рукоягку 45 управления скоростью .1еме1цения комбайна. Ре- BepcHBHbiii идромотор кинематически сое динен с М1.ханизм .1м нег емсчцения (не показан) комбайна.
Vc poii гво ч.пя . iinn в.ич-1ия nepeMenie- пием горного Kov.fi;)и||;.1 i;.i:ir)iaeT следующим образом.
При движении ко.мбайна в направлении снизу Biiepx (см. фиг. 2) рабочая жидкость в поршневую полость 31 гидроци.чиндра 5 по магистрали 30 не посту |ает, так как в этом с,:1учае в па нор ной ма1 истрали масл( воде 18 и 1 сосдипенньгх с ним магистра- , 1и 17 и канале 9 давление рабочей жидкгк- ти (Р) будеп равно дав.чению поднора (Рп ), которое }(иже дав.чения в гидроприводе механизма 11е 1емеш(М{ия комбайна при хо.пос- том ходе комбайпа (Р j, а нмен но но уровню :)того да15ления - У- ируетея пружина 12 зо.чотника 1 1. Под действием нружины 12 зо- , 1от1П(к 1 I перекрывает канал И), нренят- сгвуя 11оступ,лению в него )абочей жидкос- 1И из кана.ча 9, и через магистраль 30, открытый капал 8 и сливную магистраль 19 соединяет пор1ппевую полость 31 гндрои.и- .1индра 5 с баком 20 i и STOVI цоз)рагная нружина 2 ..:--; че; пток 27 внутри г ил- ропп.1ИH;IJ ;I ,. :: ( 29 niTDKa 27 не воз- лейс п-ует на ; (|Н)лок 2,3 собачки 22.
1)ужи11ой 2о собачк- 22 п.чотно прижата к пре.юхранитечьной цени 4 и свободно пропускает )ве1|ья п.епи при лвижении комбайна вверх, и(; сюпорит комбайн на предохраните,и.пой цепи 4, упираясь в ее звепо, при niH.i.ri Ke пе(Н У.епи. Ния комбайна вниз.
Движение комбайна в направлении сверху вниз u))-,iio только тогда, когда собачка 22 выведена из взаимодействия с предохрани цепью 4 (см. фи1 . 3 и 4).
Ес.чи комбайн работает (см. фи1 . 3) в направлении сверхч вниз под нагрузкой (вые.м- ка це,чика у| ля и.чи уст уна с зачисткой), го при не)ек,почепии рукоятки 45 в положе ние, соответствующее чтому направлению движения комбаЙ1 а. li магистрали 8 гид- ponpn uii;i мехаHH.vvia перемещения комбай- lia даилсня . 1;;б:;чсй жидкости будет превьг- гчат дави. :И1е, развиваемое при холостом Xii.ve комб.я.йна (P), на которое с помощью )eiл.чировочной гайки 14 и плунжера 13отре- гу.чирор.ан; нружина 12. Рабочая жидкость iio.i давлением будет- поступать по ма- гист)а.чн 17 в управляющую камеру через капа,: 9 и давить на зо.чотник 11.
Под действием рабочей жидкости золотник 1 1 преодолевает С()нротивле1- .-|е )ужи- Н,1,12. перекрывает кана.ч 8, а кана.ч 9 соединяетсй с каналом 10 и через магистраль 30 с поршневой полостью 31 гидроцилиндра 5 и каналом 33 в корпусе 32 клапана 6 давления. Под давлением рабочей жидкости плунжер 37 преодолевает сопротивление пружины 38, перекрывает канал 34 и отсоединяет друг от друга поршневую 31 и штоковуюЗб полости гидроцилиндра 5. Одновременно рабочая жидкость, поступающая в поршневую полость 31 гидроцилиндра 5, начинает перемещать поршень со штоком 27, при этом возвратная пружина 28 в штоковой полости 36 гидроцилиндра 5 будет сжиматься, а рабочая жидкость из штоковой полости 36 гидроцилиндра будет выталкиваться через канал 35, обратный, клапан 40 и магистраль 39 в магистраль 19 и дальше в бак 20. Перемещающийся шток 27 своей головкой 29 воздействует на поводок 23 собачки 22 и выводит ее из зацепления с предохранительной цепью 4, одновременно сжимая пружину 25. Пока давление рабочей жидкости в напорной магистрали 18 гидропривода механизма перемещения комбайна и в соединенной с ним через блок 2 управления поршневой полости 31 гидроцилиндра 5 будет превышать давление холостого хода (Рчх) комбайна, что соответствует нормальной работе комбайна под нагрузкой при движении в направлении сверху вниз, собачкка 22 не будет находиться во взаимодействии с предохранительной цепью 4 и не будет препятствовать перемещению комбайна. При обрыве тяговой цепи 4 давление рабочей жидкости в магистрали 18, а, следовательно, в канале 9 и в поршневой полости 31 гидроцилиндра 5 падает до уровня давления холостого хода. При этом золотник 11 блока 2 управления под действием пружины 12 перекрывает канал 10, прекращая доступ рабочей жидкости из канала 9 в поршневую полость 31 гидроцилиндра 5 по магистрали 30, и открывает канал 8, соединяя поршневую 31 полость гидроцилиндра 5 с баком 20.
Давление рабочей жидкости в поршневой полости 31 гидроцилиндра 5 и в канале 33 клапана 6 давления также падает до нуля, при этом плунжер 37 под действием пружины 38 перемещается, открывая канал 34, и соединяет между собой поршневую 31 и штоковую 36 полости гидроцилиндра 5 через каналы 34 и 35.
Поршень со штоком 27 гидроцилиндра 5 под действием возвратной пружины 28 перемещаются, вытесняя рабочую жидкость из поршневой полости 31. а при этом перемещении поршня в штоковой полости 36 гидроцилиндра 5 создается разряжение, при котором рабочая жидкость из поршневой полости 31 гидроцилиндра 5 перетекает по каналам 34 и 35 в штоковую полость 36, а избыток ее по магистралям 30, 39 и 19 выталкивается в бак 20 Головка 29 штока 27 отходит от поводка 23, освобождает от своего воздействия собачку 22, которая пол во.ь действием пружины 25 Е)Х{)дит но взаимодействие с предохраните. 1ьмой цепью 4, мск ле чего комбайн автоматически стопори ген на предохранительной цепи 4
При холостом перегоне комбайна н н;: правлении сверху вниз (см, фиг 4) из-sa отсутствия нагрузки давление в напоруюй магистрали 18 гидропривода механизм; fiepc- мещения комбайна будет находиться на
0 уровне давления холостого хода и.ш ниже его, а так как пружина 12 отре: у.шрона- на по давлению холостого хода с некоторым превышение.м его, то золотник 11 перекрывать канал 10 и рабочая жидкость
с не будет поступать в порщневую полость 31 гидроцилиндра 5. В этом случае применяется принудительное воздействие на золог ник II с помощью рукоятки 16 приспособления для ручного управления. При нажатии на рукоятку 16 она нажимает на тол0 катель 15, который воздействует на .юлот- ник 11 и поднимает его, открывая канал 10 и обеспечивая поступление рабочей /кпд- кости в порщневую полость 31 гидроцилиндра 5. Происходит вывод собачки 22 из взаимодействия с предохрани ге.шной ае
5
пью 4.
Пока рукоятка 16 ручного управ.кмшя находится в нажатом состоянии, собачка 22 не будет находиться во взаимодейстЕши с
30 предохранительной цепью 4 и не препятствовать перемещению комбайна в nanpaib лении сверху вниз. При прекращении воздействия на рукоятку 16, что происходит при возникновении аварийной cHTyaiuiii или при остановке комбайна, золотник 1 1 под CTBileM пружины 12 откроет канал 8, перекроет канал 10 и тем самым прекратится доступ рабочей жидкости в порц невую полость 31 гидроцилиндра 5 и соединит ее через магистраль 30, канал 8 и магистраль 19
д|-| с баком 20. При этом произойдет автоматический ввод собачки 22 в зацеплемпн с предохранительной цепью 4.
Устройство для управления перемещения горного комбайна позволяет снизить инерционность системы и время ее срабатына
45 пня, повысить надежность работы комбайна за счет удержания комбайна при возникновении аварийных ситуаций во время его движения в направлении сверх вниз При этом устройство обеспечивает но.шожиость регулировки порога его с()абаты1и1иия и
50 ручное управление комбайном при его манен- рах и холостых перегонах в направ.1ении сверху вниз, кроме того, расширяется оо ласть применения безопасной работы комбайна на п.тасты с углами паления до
55Формула и:11)преген11.ч
1. Устройство для прав ления перемете нием горного комбайна, нк.тючающее регуJM yi. 1 идронасос, гидравлически соеди- ii(.MiHi)iii no замкнутой схеме с реверсивным и ромо гором, который кинем;1тически соединен с механизмом перемещения комбайна, 1 р1 До ра1{ительный механизм, в корпусе ко- oi)ii:() разметены собачка ддя взаимодей- сгвня с растяну гой по всей д. шне даны пре- дохраните,и,ной цепью и под.пружиненный чоиочок, который установ. 1еп с возможно- и,к) и sail модействия с подпружиненным Hib KOM идроцидиндра управления, нанор- tiyH) и сливную магистрали и систему нод- 1ПИКИ с баком для рабочей жидкости, отли- чакчцсая гем, ч го, с целью повын1ения flaд(. Жности (1абог|)| комбайна на по. югих и наклонных пластах при аварийьп 1х ситуациях. Olio снабжено клапаном дав, 1ения, в корпусе когорого установлен с озмож- мосгыо 1с(1емени ния нлунжер, оди то)ец когорпк подпружннен отпосительим корпу- la -:.,; 11,1, а д)угой ei o торец гидрав- соединен с норшневой по,1остью |Д|)а управления, обратным к,пана- i;o:(H ционным блоком управления, ге Koropoi o установлен с возмож- HocibK пе|)1 мешения зо.ютник, один торец Koropoid подпружинен относительно корпуса 6, iiiKii у 11|К1 в,1ения, а другой торец сообщен с iipaB, 1якицей каме|1ой, в| 1полнецпой в кор- блока , 1ения, при поршневая
по,тость I идроцилиидра имеет возможность гидравлического соединения через клапан дав,1епия и об)атный 1 лапан с баком для рабочей жидкости и через блок управления с напо)Н()й маг истра,лью гидромотора и с баком для рабочей жидкости, а нпбковая полость гидроци, 1индра управления гидрав. ш- чески соединена через обратный клапан с бак )м , ыя рабочей жидкости и имеет возможность ь 1ИЧССКОГО соединения че)ез
0 K, давления с порпневой полостью гид|1 .аи,1индра ynpai;.. , причем управляющая Kaviepa С,. : :равле.чия идравли- ч.сски сое чинена . напорнои магистралью ги промотора.
2, Устройство по п. 1, отличающееся тем, ч го блок управления имеет приспособление д. 1я ручного управления перемещением его зо, 1отиика, вьпюлнеиное в виде толкателя и шарнирно закреп,тенной на корпусе б. юка управления рукоятки, при этом толкатель
0 закреп.чен на торце ,и)тника со стороны управляющей камеры, а рукоятка установ- ,iena с возможн() взаимодействия с тол- кате, К М.
il Уcгpoйcтв(J по п, 1, отличающееся тем,
c что пружина, расположенная между корпу- со,м бл(1ка унрав.чеиия и его зо,тотником, устанон, 1еиа с во,можностьк) регулировки УСИЛИЯ ее ноджачия.
5
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидропривод управления рабочим органом землеройной машины | 1984 |
|
SU1310482A1 |
| НАТЯЖНОЕ УСТРОЙСТВО СКРЕБКОВОГО КОНВЕЙЕРА ПОГРУЗОЧНОЙ МАШИНЫ | 1992 |
|
RU2057695C1 |
| Гидропривод перемещения исполнительного органа горного комбайна | 1978 |
|
SU945424A1 |
| Устройство для удержания угледобывающего комбайна | 1989 |
|
SU1776789A1 |
| Устройство для автоматической защиты исполнительного органа горной машины от перегрузок | 1985 |
|
SU1301968A1 |
| Пресс для склеивания | 1976 |
|
SU656870A1 |
| Тормозное устройство горного комбайна | 1983 |
|
SU1132011A1 |
| Гидропривод одноковшового погрузчика | 1975 |
|
SU588302A2 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД, ПРЕИМУЩЕСТВЕННО МОБИЛЬНОЙ АНТЕННОЙ УСТАНОВКИ С ПОДЪЕМНОЙ МАЧТОЙ | 2010 |
|
RU2449942C1 |
| Гидросистема бурильной установки | 1980 |
|
SU907234A1 |
Изобретение относится к горной промышленности и позволяет повысить надежность горного комбайна на пологих и наклонных пластах при аварийных ситуациях. Для этого устройство снабжено закрепленным на предохранительном механизме 3 гидроцилиндра /ГЦ/ 5 управления клапаном (К) 6 давления, обратным К 40 и двухпозиционным блоком 2 управления (БУ). В корпусе 32 К 6 установлен плунжер 37, один торец которого подпружинен пружиной 38 относительно корпуса 32, а другой сообщен с поршневой полостью 31 ГЦ 5. В корпусе 7 БУ 2 установлен золотник 11, один торец которого подпружинен пружиной 12 относительно корпуса 7, а другой сообщен с выполненной в корпусе 7 управляющей камерой 10. Поршневая полость 31 сообщается через К 6 и 40 с баком 20 системы подпитки и через БУ 2 с напорной магистралью гидромотора 42 и с баком 20. Штоковая полость 36 ГЦ 5 соединена через К 40 с баком 20 и может сообщаться через К 6 с поршневой полостью 31. Камера 10 сообщена с напорной 18 магистралью гидромотора 42, соединенного с механизмом перемещения комбайна. В корпусе 21 механизма 3 размещена собачка 22, взаимодействующая с растянутой по всей длине лавы предохранительной цепью 4, и подпружиненный поводок 23, взаимодействующий с подпружиненным штоком 27 ГЦ 5. При обрыве цепи 4 золотник 11 под действием пружины 12 перекрывает камеру 10, прекращая доступ жидкости в полость 31, и соединяет ее с баком 20. Плунжер 37, перемещаясь, соединяет полости 31 и 36. Головка 29 штока 27 отходит от поводка 23, собачка 22 освобождается и взаимодействует с цепью 4. Комбайн стопорится. Возможно ручное управление комбайном при его маневрах и холостых перегонах в направлении сверху вниз. 2 з.п. ф-лы, 4 ил.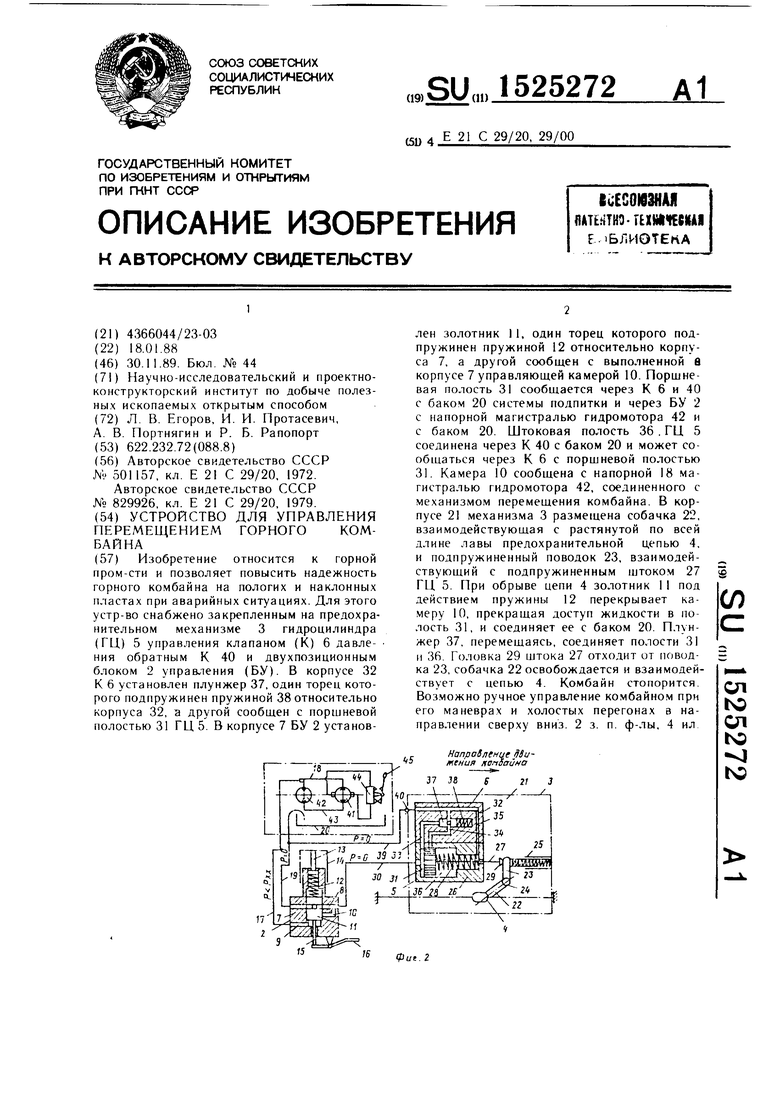
0- -Ф -
Фиг. /
I л)С I ани ММ . Л :,.-njh Т .лрс.; И fV, i lT Tiip;i :
Гм х ..;i BcHHciro ит-ти i::i 6pi гениям и ;
13 i;}5. М л кн;;, Ж 35, P:.iiuh;i i :
I ipiiH .ic I Hi H-n .-и s.iaTi.-ipjCi :1Й комбинат «IfaieMTs. i ;
| Предохранительное устройство для удержания горных комбайнов на плоских и наклонных пластах | 1972 |
|
SU501157A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Предохранительное устройство дляудЕРжАНия гОРНОгО КОМбАйНА HA пОлО-гиХ и НАКлОННыХ плАСТАХ | 1979 |
|
SU829926A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
