13
I I ilHi 3 Г8 235
h-сл N:) СП
со
1чЭ
Из()Г)р(чение относится к машинострсх - ник) и может быт1) испо.пьзонано в TCXHO.IO- I li R CKOM оборудовании для гфес бразова- ния движения.
Ile.iij изобретения - расн1ирение кинематических возможностей иуте ; се.тектнвного управления движением каждого лтока.
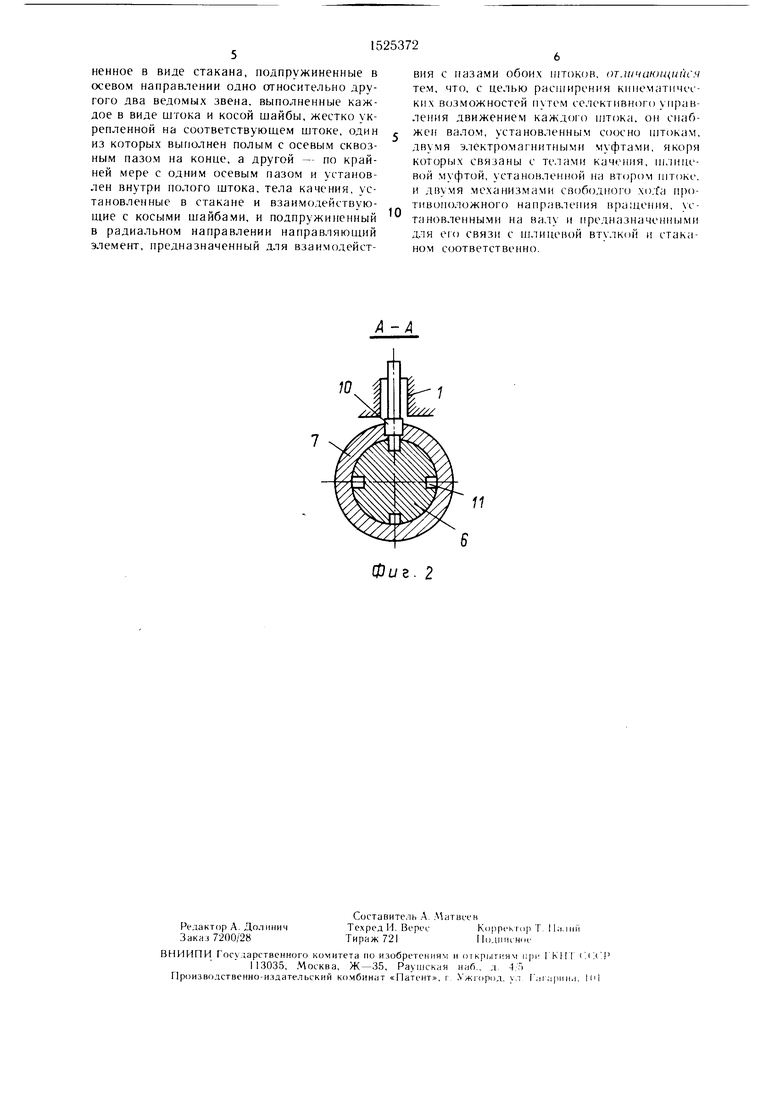
На фиг. 1 изображен меха мзм нреобра- зования вращательного движения в сложное, обни1Й вид; разрез; на фиг. 2 - разрез .Л А на фиг. 1.
Л еханизм содержит корпус I, вал 2, ус- танов,ченное в корпусе 1 ведункч звено в виде стакана 3, два ведомых звена в виде косых И1айб 4 и 5, жестко связанных со штоками 6 и 7, и н)омежуточные звенья, выполненные в виде тел 8 и 9 качения и установ.тен- ные с возможностью oeeBtxi) перемещения в отверстиях стакана 3. Тела 8 и 9 качения ус- тановлен1 | с возможностью взаимодействия с кос1)1ми торцами шайб 4 и 5 соответственно.
Шток 7 выполнен полым и внутри пего коаксиалык) расположен HITOK 6. В корпусе 1 установ.тен |)адиа. 1ьно подпружиненный направ,1як)ни1Й (.темепт И), в ппоке 6 выполнены паз1)1 II, а в HiTOKe 7 - сквозной паз 12, coBMeiiK HHijic между собой посредством направляющего э.темента И). Пееко.тько пазов 11 н1Токе 6 1 ыполнепы д.1я обеспече- ппя необходимого 1ла рассо1 1асования между взаимным ноложение.м И1айб 4 и о. С другой стороны 6 для же нели вы- но. 1нен1 1 лыски 13 иод к.люч, а в стакане 3 окна, за счет чего возможно получение разной величин) ереме це ИЙ итоков Н 1 7 е рабочими (е 1() I, В()Л- няк)пи1ми различн1,1е тех 1олог ческие 111. ЛАеханизм снабжен двумя у. )МИ ;({)ТаМИ 14 и 15.
ia стакане 3. Якоря IB и 17 эгих ф г являются гел 8 и 9 каче(1я i связа П)1 со стака1 ом 3 )1м соеди ен 1ем. Alexa- 1зм имеет в();5М() также не Х ход|1ть
от ОЗВраТ О- 10СТу 1аТеЛЬ}К)ГО к
сложному дв жению, состояпи му из вра цаТе.ТЬНОГО и 103ВраТ 0-Г ОСТу 1аТ(. /1.1Я
() о |)едусмотре1 а 1. муфта 18, связанная меха 1измом 19 евобод|1ог() хода
с валом 2
со нгтоком Ь. (л)) со плицевой муфтой 18 уста 1овлена и1, И11 дрическая муфта 20, свя- меха П13мом 21 своб()() хода с ва,ом 2 i жестко. ), с io- ) 22 С Корпусом I ма. .еханизмь 19 и 21 свободно) хода меЮТ )П() () ia ра В. вра1ие 1ия.
Межд перабочими (1) I 4 и 5 устано) i) 23, обеспечпва 01цая адежн()е ко 1такг1 рова1 ие взаимодс йсгвх |) косых то)цов П1айб 4 Г) с ге,1амп 8 и 9 .
.Механизм работаег следу О 1и1М образом.
0
5
0
5
0
5
0
5
0
5
При вра1цении вала 2, напри.мер, по часовой стрелке это враш,ение через механиз.м 19 свободного .хода и шлицевую муфту 18 передается штокам 6 и 7 с косыми шайбами 4 и 5. При этом тела 8 и 9 качения обкатываются кос)М шайба.м 4 и 5 и заставляют смешаться их в.месте со П1Т(жами 6 и 7 вдоль их оси в зависимости от нахождения тел 8 и 9 качения на косых шайб. В резу.тьтате ведомые звенья будут совер 11ать сложное дв 1жение, состоя цее из врашатель- ного 1 возвратно-поступательного. При уг- лово.м развороте шайб 4 и 5, показанном на фиг. I, последние вместе со итока ии 6 и 7 будут совер ать встреч 1о-нанравленные пере.ме и ния. Чтобы UJTOK совершали од- . движение, необходимо ред- нарительно ровернуть ток 6 на 180°. Для этого электрома -нитную муфту 14, этом ее якорь 16, сжимая ружину 24, вместе с тело.м 8 занимает крайнее положение. После этого приподнимают аг равляю|ций элемент 10 из паза 11 и ключо.м, ис 1ользуя лыску 13, оворачива от ()к 6 на требуемый угол, а направляюший эле. 10 возвращают в исходное оложе- ние.
/1ля 1е|)е.хода от сложно о движения к простому возвратно-посту 1ательному реверсируют а равление привода (не г()). три враше ии ведуп;его вала 2 (ротив часовой стрелки) этс) вращение через механ 1зм 21 свободного хода ереда- ется ц 1ли дрической .муфте 20, стакану 3, темам 8 и 9 качения, к() айбам 4 и 5 со пт()кам 6 и 7. Поскольку вращательное движе ие ia шток 6 не передается (меха- 19 свобод О Ч) хода заклинивается и поэтому пли 1евая муфта 18 не вра цается), пток 6 и 7 будут сове)ать только воз- иратпо-поступатель 1ое движение.
Для (;чной , на ример (), включают электрома нит ую муфту 15, этом ее якорь 17 переме 1ается в край- ве) оложе ие и выводит тело 9 ка- 3 контакта с косой П айбой 5. В ре- зул /гате 1ри враш,ении 1ривода ротив часовой сгрелк 7 будет 1е одвижен, а пток () будет совер 11ать возвратно-поступа- движе ие. Аналогично включе- 1ии э.тектро.магнитной муфты 14 неподвижным будет пток 6, а шток 7 будет двигаться возврат 1о-посту 1атель 1О.
При включении же 1ривода по часовой стрелке и включении одной из муфт один из 1 токов будет совершать возвратно-ностуна- тель()е дв 1жение, а другой шток будет вра- 1 1аться со скоростью приводного вала.
Формула изобретенILH
ААеха1 ИЗм 1реобразования врашательно- К) движения в сложное, содержащий , ) в не.м вед niee , выполненное в виде стакана, подпружиненные в осевом направлении одно относительно другого два ведомых звена, выполненные каждое в виде штока и косой шайбы, жестко укрепленной на соответствующем штоке, один из которых выполнен по,лым с осевым сквозным пазом на конце, а другой - по крайней мере с одним осевым пазом и установлен внутри полого штока, тела качения, установленные в стакане и взаимодействующие с косыми шайбами, и подпружиненный в радиальном направлении направляющий элемент, предназначенный для взаимодейст
ВИЯ с пазами обоих UITOKOB, от.и/чакхциися тем, что, с целью расширения кинематических возможностей путем селективного управления движением каждого штока, он снабжен валом, установленным соосно штокам, двумя электромагнитными муфтами, якоря которых связаны с телами качения, шлице- вой муфтой, установленной на втором штоке, и двумя механизмами свободноп) xo;fa противоположного направления в)а;цения, установленными на валу и предназначенн1,1ми для ею связи с шлицевой втулкой и стаканом соответственно.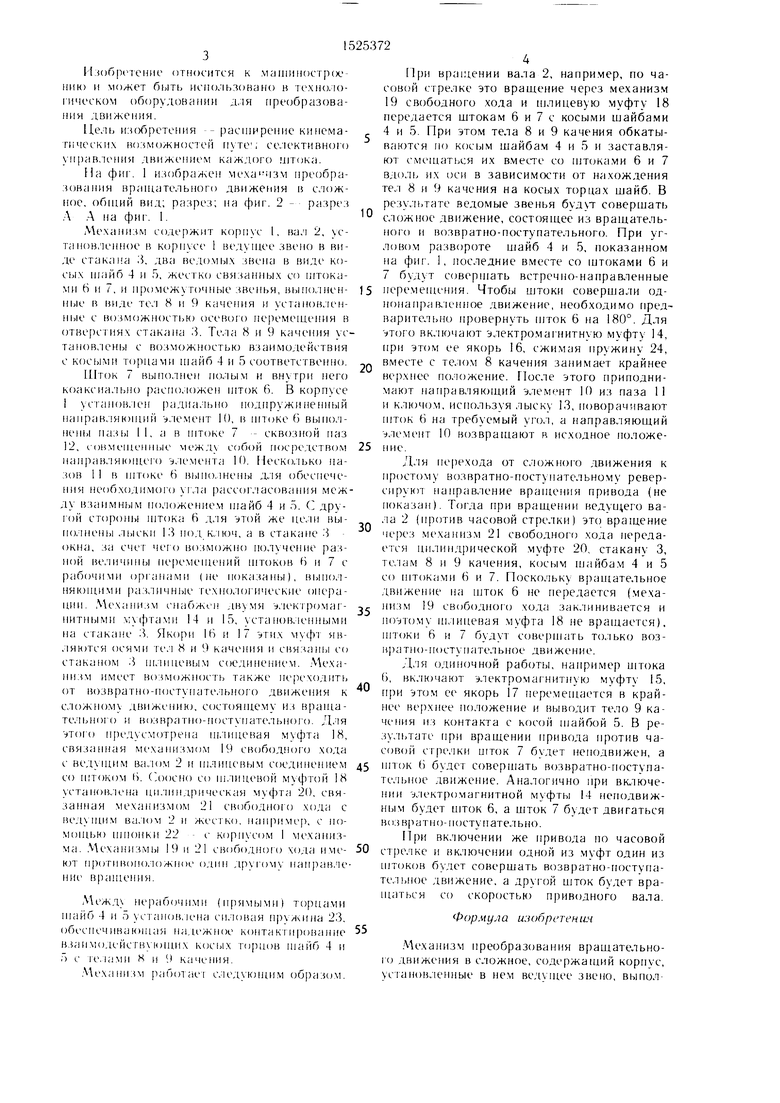
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм преобразования вращательного движения в сложные | 1989 |
|
SU1733776A1 |
| МУФТА СВОБОДНОГО ХОДА | 1996 |
|
RU2114337C1 |
| Устройство для преобразования вращательного движения | 1988 |
|
SU1504445A2 |
| Реверсивная передача | 1987 |
|
SU1490359A1 |
| Устройство для преобразования вращательного движения в возвратно-поступательное | 1986 |
|
SU1308797A1 |
| МУФТА СВОБОДНОГО ХОДА | 1996 |
|
RU2110707C1 |
| РЫЧАЖНЫЙ ДИФФЕРЕНЦИАЛЬНЫЙ МЕХАНИЗМ | 1997 |
|
RU2134829C1 |
| Устройство для преобразования вращательного движения в сложное | 1986 |
|
SU1404717A1 |
| РЫЧАЖНО-ЗУБЧАТЫЙ МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В СЛОЖНОЕ | 1996 |
|
RU2110717C1 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В СЛОЖНОЕ | 1994 |
|
RU2082051C1 |
Изобретение относится к машиностроению. Цель изобретения - расширение кинематических возможностей. Указанная цель достигается за счет селективного управления движением каждого штока 6 и 7. При вращении вала 2, например, по часовой стрелке через механизм свободного хода /МСХ/ 19, шлицевую муфту 18 вращаются штоки 6 и 7 с косыми шайбами 4 и 5. При этом тела качения 8 и 9 обкатываются по косым шайбам 4 и 5 и смещают их вместе со штоками 6 и 7 вдоль их оси. В результате, последние совершают сложное вращательно-возвратно-поступательное движение. При угловом развороте шайб 4 и 5 на различные углы возможно получение разно- или однонаправленного движения штоков 6 и 7. Электромагнитные муфты 14 и 15 могут выключать тот или иной шток, выводя из контакта с косыми шайбами 4 и 5 соответствующее тело качения 8 или 9. При реверсировании направления вращения вала 2 начинает работать МСХ 21, а МСХ 19 выключается. При этом штоки 6 и 7 будут совершать возвратно-поступательные движения. 2 ил.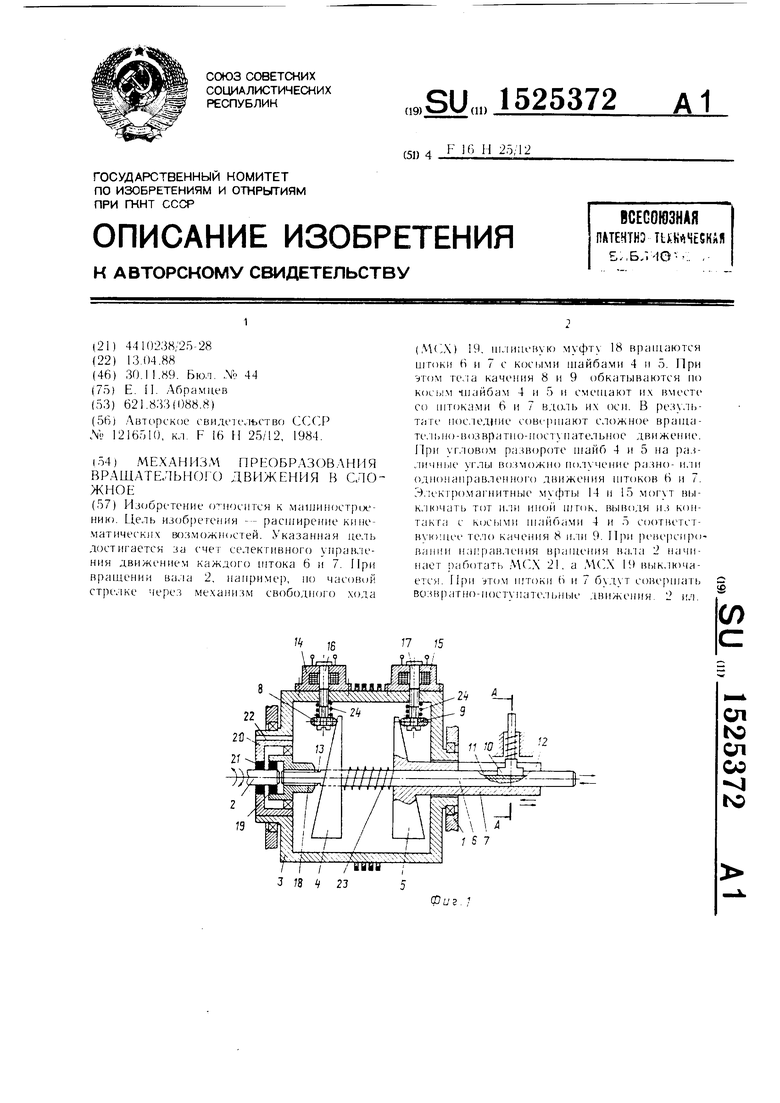
Фиг. 2
| Механизм преобразования вращательного движения в возвратно-поступательное | 1984 |
|
SU1216510A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
