11 «)б)етение отнг)сится к юбототе.чннке и может быть использовано при создании )обо7ов 1ехн(.).тогически.х конвейеров.
Пе.ь изобретения повьииение быстродействия устройства за счет умепьп1сния ,1и ориентирования детали.
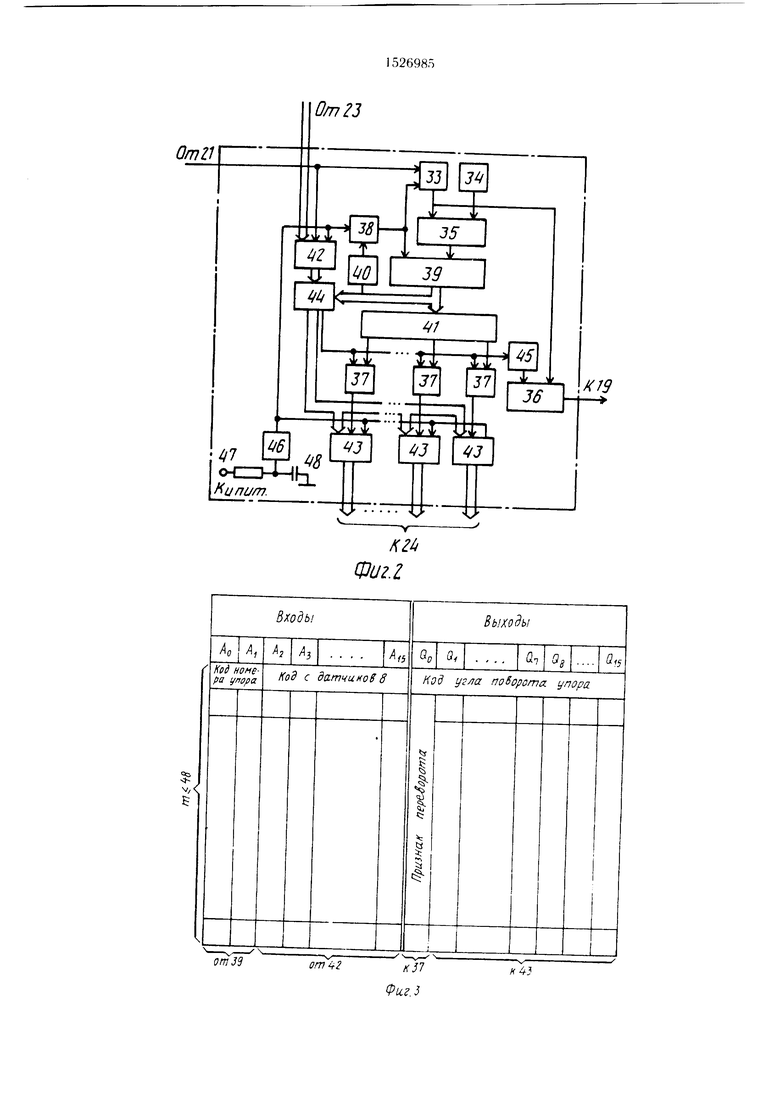
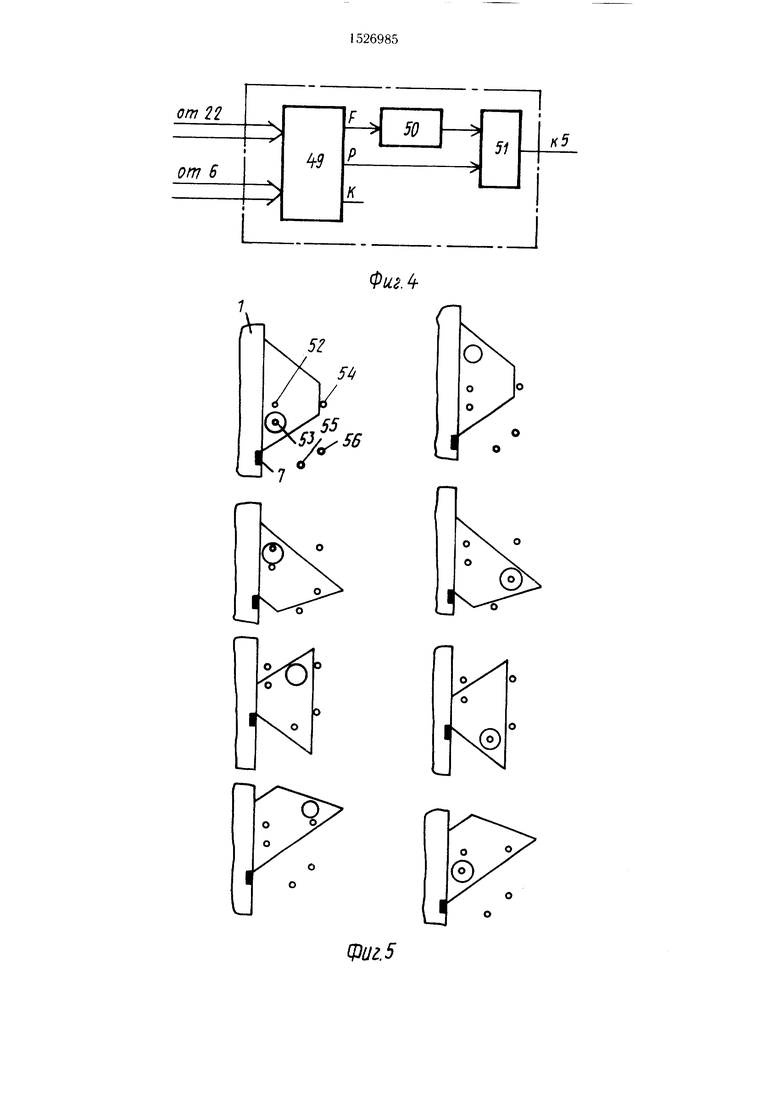
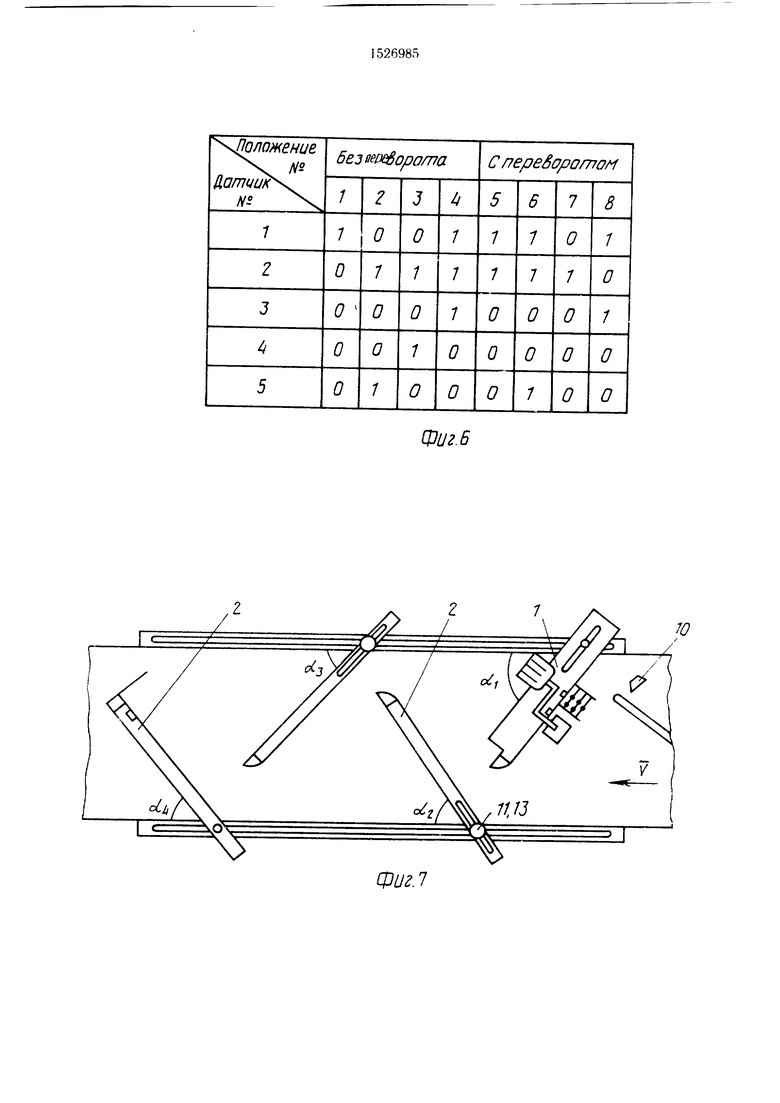
На фи1. 1 изображена функциональная с.чема уст(ойсгва; на фиг. 2 вариант вы- 11.-).1нення б.юка управления; на фиг. 3 таблица кодирования програ.ммируемой .тогичес- кой матрицы; на фиг. -1 - вариант выпол нения блока согласования: на фиг. 5 возможные устойчивые положения дета;1и 1ина т)апеции; на фиг. 6 - коды фото. к Тчи- ков на устойчивые положения детали типа трапеции; па фиг. 7 - пример расположения упоров для ориентации детали типа т)апепии; на фиг. 8 значения уг.юв на клона упоров д.чя ориентации детали типа Т)апеции.
Устройство содержит первый 1 и вторые 2 упоры, конвейер 3, сменные )1ак ;неч- ники 4. пе()вый двигатель 5, первый датчик Н полон.еиия, псры,|й дагчик 7 касания, б.юк (N фотода 1CHKCJH, гЗ. Юк 9 осветите.тей, .1:, И), вторые двитатели II. второй 12 и т)( 3 датчики по.тожения, элекромаг- нит 14, второй 15 и третий 16 датчики касания, .i . iniK 17 питаьия, iieiiBbiii 18 и в го рой 19 ключи, пе|1вый форми Н)вате,1ь 2(1 ,, первый ,1емент21 задержки, б,юк 22 прав,1ения. блок 23 формирова1е,Н й импу,и.сов, б, 1оки 24 сог.тасования, третий 25 1 Ч1лве 1тый 26 |.,,|ючи второй формиро- 11, 27 имп, 1Ь(.;, вирой 28 и третий 29 3, ie.U HTbi задержки, третий форм11(овате,1ь ЗОимпчмьса, четве 1тый э.чементЗ задержки,
,тчю1цая 32, ai, ос.-а., г,ты )о
та п(|)Н)в.
х:юк управления (ф1Гг. 2) содержи; триггер 3.5, ic-нератор 34 тактовых имп,н. ее - первый .i5, второй 3t), третий ,37 э,1е- менты И, элемент ИЛИ 38. двоичный счег- чик 3; формирователь 40 имнульса, де- 1пифратор 41, первый регистр 42, вторь1е ре гист(1ы 4,). блок 44 памяти, элемент И1 45,
сл го
с:) со
00
сл
i)2n985
34
, (iii lif-. 4ti, nMMi.Top 47 и кои-о.юка 23 формирователей импульсов, на выхом;.1(||, t8.ле которого появляется сформированный
.||)к ,01 ,iacoB;inn4 iijinr. 4) содержитдвоичный код, поступающий на вторые вхоi;,. м:,1и1. 1 4) juiocoi ласования, преобразо-,пь1 блока 22 управления, на первый вход
i ,.:i.ib ), гили пмь 5 мощности.5 ьоторого подается сигнал с элемента 21 за1 ki ф | S 4;i.-. датчики 52 56 блока; .ержки. Величина задержки элемента 21 зафо I TUi I iiMKi iiдержки выбирается больше времени срабаN I piHi, вч I LiHcv; ;u T с. сд-. ницим |).тынания б/кжа 8 фотодатчиков и б.чока 9
1а 4,11.ч uic |ioitKii и ио чсиия выяс-( светите. И й При пг)ступлении см: 1;ала с :)ле(1 ; Г:-я V K.iiMiM 1я:1ом Д1 |,;1лей Гллл )або-мента 21 задержки (фиг 2) происходит
I а 11, . с |-(|)йс ГНС. :ii i6npaK)TCH число и местоустановка три -г-ера 33 в единичное состоя11чл,)/ксН11и ({HI И1Д,1 :чик1)р. блоке 8 )тодг1т-1Д|е и запись двоичного кода с блока 23
чгьон. псоблодимос расг,оз1 авания()о;)миронателей импульсов в регистр 42. (иг iid ; 1Ж1 Н1. Э КС ПС I И м t liTa,: ь НОьа.т с выхода триггера 33 открывает б. юк 35
iii,ini;;iac- СИ чис.:; xnopiiH 2, их 11, СТ()поло-г им11у;1ьсы от 1ЧМ1ерато|)а 34 актовых имл.М;-.н-- па к 1.чве;.сре, ipojiMa наконечников-,5 i ульсон пост иают fia вход счетчика 39. Коэф4 и . iiaK. . ,; .7,,, нооочоди мыс(ри пи.ен г пе|.1есчета счетчика 39 |)авен in- 2),
; Ч .: i : пГ::,1 , MI К . s lhMH 2 ксс I. С 4nc;iv упранляемыу vHopoB. Проясхо, г . :Г I l. :1;Ж1. :;ия Гп..; :;i |)онм(1 га (. водаи i в;)|борка содержичИ Гс о л ока 44 При 5: ом
:ис;, :,i( . ViMhi -ij, ai. ., :. модбига млади ие адресные входы блока 44
;K)iv 4 11Я к;; cToH4ii В(ч п |Г::, м.;-кенин,: ();инлч Я код i O счетчика . У9, а fia стар -:.. ,т, 1 i if 1 с Ь . K. iiiHi- siiiM , чано- Ие ко, 1, соответствуклдий типх дета.чи
.п-. я г; Г чк 41.1 номеру er .j устойчивого пскложения, с
J-; i l M ilioM C4Ci HHi;i: ia. )дви-1-.ыхо.:1он регистра 42.
:;;;; ;ч 11,1 , я м 114. ;|), li ко Ч)-Па вь1хода Д()а гсфа 41 последова: - . i ;,: ;:; I ын.;;1-i д.-i. iaK It ;, iio/io же HiiH.К л но (})орми ру к)1 ся им11у..|ьсы, ностчиаклцис
ь. i- I t. Г ,1 2Г ,1 1ХОДЯТСЯ fi in25 а первые входы б.локов 37, на вто(1ые
.:-i;iiiii, i...ii 1 MiifiM си.на. на их nbixii ieгхо. пл )рьгх юступаеч ч выхода
;. i-,v. п.ижа 44. по котором-, iipoi pay сгся
1 Ч i.... :;мм . ч; scrpoiicFBa н (/онгм);; ц-. UiiH.ik ac icBoCJora с ьмйчиво : i ьо шж .-нпя .
ii. : . riMic:: .; .Vi. сЧ(. 3;). :.;i ( lij .;u | аль 10 иал /.шг. я и i i .,i4:i кпм
.M ij ч p . ii. i p Mi 43 п. юка 22 , i jaB. ii ; (можепии без переворота, i о па ч . выхо1-: Ji ..-Hi.i iipoMCXD.nrr c:;e.ivKi-- G с пс-является rnina.i lv 1 чго.м c.,- i- ..;. i. i .;yi-M i d: , riiK: li; iMi. CO-i o. i . Л1.1 a e pa6oTt)i счегч1 ла ii ;u4i:i 4)ia . :i.,i Г- PC чр f. iM -i и Kon.icHca i)i)a 18,юра 41 1роисходяп после HUUI чмь.чое iiiKph;
.:. . ; ; . ii, 4(. B:)VV-:-,IH зсе- псрсчодп) inc о ижа 37 , , 1сдова 1ел ьная 1;ыись
,-; ;.-ч 1. :1И, ;: 1J: , .. И : :i. об|1. i(. ii;i. пос -i (мс|//ки Г.РЧо опра 1ппвасмо ячеек б 44 в
., 1114 . .; ;. i..ii.MiMn,; ИГ. 4(i ч.: и ч ; Ci ч..--| ры 4.V В ито1е в каж;;о 1 (.ими-тре 4;i : .; sd.; . ik :4 4i,i И,Mil .)Н и BXO.U.I . -, а ;исан Cttoi код, соо™не i сгв кча нн
: ,-., . л. i- :ii i . . О .л ..яРмс lerHi i l,; 4 L: i; cut) ,|)Д1:мо vi IMV |)a.-;Bo|u.: i a и.;имг(: и-; .n-ii; :ii;:;i , -1. 1 ; 14 u sHriaci j64 ieH4i. v ., з, ясм;,|х iii)|ioB 2 M, :a дп;и,: Hijixoj блс , ;iiM i; .;rin. -:; 4 связан чере- б.1ок 45 с вторым BXII
,Ь :а . i Г (ф||.1 II, .чс|, меп1аемая .1ен-.чм 6,io,;: Зь, на первьн; вх()Д )
I lii )V;i-; pi; 3. ,i-,(.-Ti-y. к кг)ак) ;ieirrbi Q : ос r паст cni na. ; с выхода i. .13 В
г I ррачляклчсп .i2 .1ои., .И) nona 1, дета.М:Р-М ui -nae, ec,in гри1ТЧ ) 33 пачодигся в
.. . грсчг.1я начьег райю-. ;i-r, i -)c ; оя нии или деталь М) .чви..i-iiiB:t I |д :i O.ihoiiiii MCiitio с -)1им .лега.ть 10i. : в положении без iiepeno;io га. на вых-:) -..1; -., I. Mj,i, -.in pa : 1ри jioM icra/iij iO б юка ЗН си1Ч)а, 1 не появится. (Ьк.-.те
-.: ч V- II 1111.1 1 til. 1 (М . 1.,к I iii X I. 11 )i(iai вы X:;:11Ц| и ч ).1а пи и во все ; t-;nc pbi 4.5 ч Па.ч
Ч I ;: .-iM-: -I г M lc.iv MCl .i ро .ЮЛ Ж а С Г iKiLibUHb15 ипна.К tia crapniew раз 1я;1е счетчика .i9 iaг-||..а, -, i-:|i,i li TiiiM iio Иl.- ll;пи. При-, ми()овате.тг. 40 импу.тьса.
:.| ||||- .V .;,,( iO :-; .илчику 7 кас.мп Яi Kui-:iporo 4i pivi б.юк 38 уста пав. :ин,чет
HI 11.. ч- . ||,| и ,. I la i м ,, I i.iiiiK; I с .ьз1ч.ика 7:phiiip .33 в )oc со1.тоя1П)и и c6paciji1Г it ..| ii,i им I ijxip .i3,i le. 1Я 2(.М1мн. ai. : .. Ч .лчик .3il Б.нж . 55 .t. -iK|4,: Baei ся, и
--.I .;a i( 11{;ва : с. 1Я 20 ими;, н-саi cpei .op ячеек блока 44 nfteKpaniaei ся.
- -(.-i.-v . ,ч .. 11пг.|и . 111 на IKK iNiiaei fia мер-50 ( ныходов 1Нчз1СГ|)ов 43, -л«.тякяпихся Bi,i-. .ui i чоч,- is и :. :с.иЧ .; .1 2i .;--м,и1ми б. юка 22 управлс1Н1Я (фчг 1), коды
:|1 i .;- -ti4 -i LtirM.iax К.1Н1Ч lo па врг-ияi f .i г чанп па вход1) cooTBi i d вуючгих блоков
1:-:1 и м- . o .i . -м i-.pijBa ;i Н И d a.iii ., :i,i.;i1:4 со Г. la сона н И Я. па другие вход1)1 К()Торых
-i.i- i iviT . Г П/и и: |р11И . .|:-.:ч|(.да|.1Я К(.-лЫ TeKV:iicii) ноложе.чи) yiiopoB
1 . : - I 1 ; ii --..- : ; и ;i |1Ч . -ч 1. 1.. i. . I hi - i г. , ;i . i-i)i .1; itt.- ; стчсунип 1ГЧ Л.с1 i Ч Ч 1.5 по..то. К(Ч и я
. :: --. --.. i 1 I- . . .;: I Г1Я Hi iBOjii Г ,i I . 1-c. l И I. I Я X - I i i б, lOK; i в 24
- - . -cij..aci:i;U .in )i jni Ki;.4bi He сонпадаки. ro на
i i-..i 1-iii - .--ii. i I.U1 X B. 1Я СЯ i; lui в. 1ЯК)П1Ие v .n налы, приводящие к врашеиию двигателей 1 1 управляемых упоров 2, к изменению их углов положения и уменьшению разности между входными кодами на соответствующих блоках 24 согласования. При достижении равенства кодов подача управляющего сигнала прекращается, и упоры 2 оказываются развернутыми на необходимые углы.
Пройдя первый упор I, деталь 10 попадает на вторые упоры 2, уже, развернутые на такие yr.ihi, что после их прохождения на последнем упоре деталь 10 может занять только одно устойчивое положение, считающееся ориентированным. При подходе ориентированной детали 10 к датчику 15 касания, установленному на последнем упоре 2, он срабатывает. Сигнал с датчика 15 касания подается на формирователь 27 импульса и далее на элемент 29 задержки. Величина задержки элемента 29 задержки выбирается такой, чтобы обеспечить остановку детали 10 на наконечнике 4 последнего упора . выполненным в виде стопора. После этого на выходе элемента 29 задержки, являющемся выходо.м устройства, появляется сигнал, который используется как сигнал к выполнению цик.ча робота.
Если деталь 10 движется вдоль первого у ;ора 1 в положении с переворотом, то в б.кже 22 управления (фиг. 2) на .младшем выходе п. юка 44 появляется сигнал «О. Этот сигнал закрывает блок 37, и съемс ннфор .мации в регистрах 43 не происходит (управ ляемые упоры 2 остаются в прежних поло жениях). Этот же нулевой сигнал через блок 45 открывает блок 36, на входе К(гго- рого iipnf Г1 твует сигнал от трип ера 33. На выхо.че блока 36 появляется сигнал.
По этому сигналу ключ 19 (фиг. I) подключает источника 17нитания к датчику 16 касания. При подходе детали 10 к датчику 16 он срабатывает. Сигна.т с датчика 16 касания поступает на в.чод формиро- ваге.чя 30 импульсов, с выхода которого сформированный сигнал подается на вход ключа 25 и через элемент 29 задержки на пе.1вый вход ключа 26. По этому сигналу ключ 25 подключает второй выход источни- ка17 питания к об.мотке электро.магнита 14. Дета.ть И) прима ничивается к нему. Величина задержки элемента 29 задержки выбирается бо.лыней временч примагничивания детали 10 к электромагниту 14. После этого ключ 26 но сигналу с элемента 29 задержки подключает втор.(й вых(;д источника 17 питания к вход двигателя 5. Вал двигателя 5 начинает нрани)ться в положительном нн- праиленни, и электромагнит 14 переносит де:а;1ь 10 на другую сторону блока 8 фото- датч.иков, переворачивая ее. При этом сраба- тываег датчик 6 положения. Сигиа.т с дагчи- ка 6 по.южения подается на эле.мент 31 задержки, в.ход ключа 26 и входы ключей 19
и 25. По этому сигналу ключ 19 О1к, 1ю- чает выход источника 17 питания от датчи ка 16 касания, ключ 25 - выход источника 17 питания от обмотки электромагнп- та 14, 26 - выход источника 17 питания от двигателя 5.
/Деталь 10 перестает примагничиви гься к э.поктромаг нигу 14 и под действием си, 1
0 тя.жесги сползает с него и na;iaer паза.д на ленту конвейера 3, переходя в состояние без переворота. Величина времени задержки элемента 31 задержки выбирается 6o.ibiiit времени сползания детали 10 с электро магнита 14. С выхода элемента 31 задержки
5 сигнал подается на вход ключа 26. Ih. эт()му сигналу ключ 26 подключает o6pai- яое напряжение, подаваемое с гретьегп хода источника 17 питания, к выходу двигателя 5. Вал двигателя 5 начинает Bpanuiiboi
0 в отрипатетьно.м направлении, и элекгро.маг нит 14 возвращается в исходное полиже1 и . ( рабапч 1вает датчик 12 гюложения, сигнал с к(тирого поступает на вход ключа 26 Не сигна.ту ключ 26 отк.тючает H(ji. напряжение от входа двигателя 5
5Таким образом, после первого iiopa I всг
детали 10 находиться в по.тоженпях без переворота. При переходе на )абог г другим типом дета,ти нропедура Hacrpoiihn и обучения производягся чаноно
Использование изобретения по..во IHI yiip -v т пть переналадку . ройс ., к., 1ч .ici заключаться лишь в замене liк,ln- c. п. ;()г,1 41, устанавливаемых ка K(iii:.;S тирующие ко/юдки. Повьпление быстс. -еис)- Biisi 11 1едла1 аемого устройства осс;щч тв. ся лз счет х.меньнкпия чи(.-,:а yi n iiiii п- cp;-i писпию с и.чвестным u Tpoiic i вом. .- iMeiiiie числа /(lofXiB достигается iiiiinsipii-.i on |им:1.тьных уг.тов накл(.1на упрашяемых поров для каждою по.тожеппя .-1и
0
5
40
Формула изопр cHti.4
. . I л-)Ч ТВО Д,ТЯ управ.Т1МП1Я рОООГОМ ГеХ
нологического конвейера, содержащее i. i . примыкающие к .тенте копнеиг р,.
с ст ;1нонлени 1е с во.можностью их opneii тации относите,Т1,но нее в Г1)риз()1гга.т1,. п.тоскогти и снабженные сменными по фо ме наконечниками, П()следоваТ|.мы1о сое ли нсниые первый лат чик .касания, lejuibiii фом ми 1ователь импульса. пе|)вый к.н)ч и Г-.им..
0 оевстите,тей, |;ослсдовательно подк.пччгн ные б.ток фотодатчикон и б,ток форч иjioii, те, импу,тьсов. источник питания, ijei uii.in выход которого соединен с вторым вхо. ох lepp iio к.тюча, П(1дк.тючеп юго первом вхо ч к элеменга (аде 1ЖК11.
5
пс-с. :е.1онател1 но соединенные ито)ои д.мчшч кас. пия. второй формировате.ть имп.1ьс, 1 i- вт орои :1. 1ад1 пжки, нос.тедоиате.Ti.no i:i)iK Тгоченные- г/горой ключ, инчик
касания. т К тий формировате. К) n.iiiy.. ibCii. третий к.тюч и а.тектромагнит, нослелова- гг, соединенные третий у,1емент заде)ж кк, четв(фгый ключ и первый двигатель, последовательно подключеншяе первый датчик положения и четвертый : / емен г )Ж кп, выход к()) подсоединен к второму ПЛОД , fU jiToro к.тюча, г|)етий вход которого соединен с выходом Brojioro датчика по. южения, четве тый вход t н,-1ходо 1 иок) датчика о,1оження, нервым входом вто- I loro к,1К)ча и вторым входом Tfjeibero к.тюча. а нятый н И1естой вход)соотв л стве)() с ВТОрЬ М I Tflerb iM .1аМИ ИС1Ч)
ка 11итан 1я, подк.тючешюго В ходом к |Н тьему .гренято к,т)ча. а 1) к входу ) о к.тюча, нь(од :тн тье -о )ова ie. v (1МП.1.са сое
5
дниен с входом третье1Ч) элемента задержки, а выход второго элемента задержки является выходо.м устройства, отличающееся тем, что с целью новьпнения быстродействия, оно соде|)жит блок управления и но каждо.му упору, кроме 1 ервог() и пос- .теднего, второй двигатель, третий датчик 11г, и блок согласования, первый )ход ка.ждо) соеди е 1 с вь ходс1л третьего .татчика .чоложения, выход с вторым дви- , а второй вход с соответствую- И. ВЫХОДОМ блока правле 1ия, подключенн()Ч) вторь.м выходо.м к третьему зходу вт-оро Ч) к,т)ча, входом - к ходу г ервого уле.мента .чадержки, а вторы- ходами к выxoд;i r б.юка формиро- i;i е. и .1ьсов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство измерения скорости охлаждения проката | 1985 |
|
SU1251996A1 |
| Устройство для контроля ударных нагрузок | 1986 |
|
SU1337702A1 |
| Способ электродуговой сварки с короткими замыканиями дугового промежутка и устройство для его осуществления | 1986 |
|
SU1371821A1 |
| Устройство для контроля накопительных магнитных преобразователей | 1986 |
|
SU1337841A1 |
| Диспетчерский комплект системы многоканальной телеметрии | 1984 |
|
SU1322351A1 |
| Устройство для контроля параметров садки в методической кольцевой печи | 1985 |
|
SU1310604A1 |
| Устройство для управления подачей шлифовального станка | 1974 |
|
SU532082A1 |
| Устройство для контроля работы прессового оборудования | 1985 |
|
SU1247910A1 |
| Устройство для поддержания нервно-мышечного блока | 1985 |
|
SU1424791A1 |
| Диспетчерский комплект системы многоканальной телеметрии | 1984 |
|
SU1322350A1 |
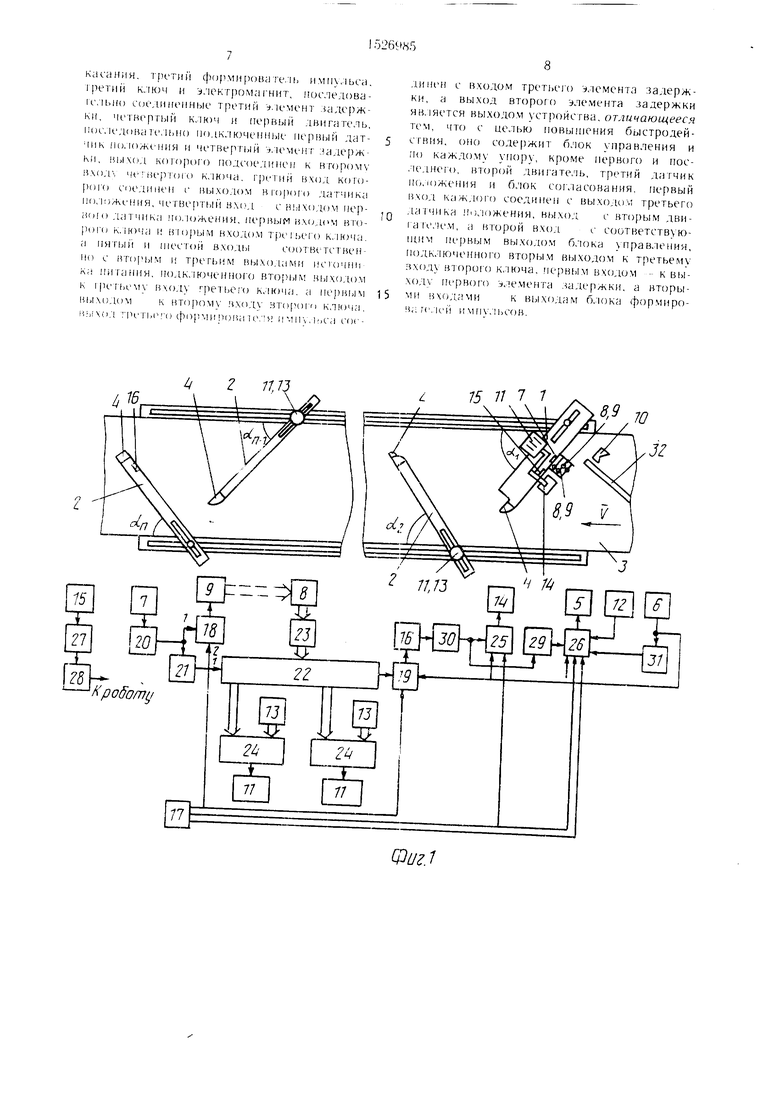

Изобретение относится к робототехнике и может быть использовано при создании роботов технологических конвейеров. Целью изобретения является повышение быстродействия устройства за счет уменьшения времени ориентирования детали. Для этого в устройство, содержащее регулируемые упоры, датчики касания и положения, формирователи импульса, элементы задержки, ключи, блок осветителей, блок фотодатчиков, источник питания, электромагнит, двигатель, введены блок управления и по количеству упоров крана первого и последнего блоков согласования датчик положения и привод. В устройстве предварительно для каждого типа детали определяется количество фотодатчиков, управляемых упоров и углы их разворота, величина которых заносится в блок памяти. Затем при перемещении детали по конвейеру производится ее ориентация на последнем упоре в определенное положение. 8 ил.
4/6
ТУ
от 39
от 2
Фиг.I
К57
f 43
52
5l
®
Фиг. 5
V
Фиг. 6
сриг.1
Фиг.8
| Ангорское СЕШлетельство (ССР ,ЧУ 1251023, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
| Ш УПРАВ И; ИМЯ РОБОТОЛА ТЕ.ХИО | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
