(Л
.
ел
1C
«
СХ
;о
Фиг.1
77
октантов управляет дву.хиоаиционным переключателем 4, обеспечивая в нечетных октантах подключение синусной обмотки к первому демодулятору 9, а косинусной обмотки к второму демодулятору 10, в четных октантах подключение к первому демодулятору 9 косинусной обмотки, а к второму демодулятору 10 синусной обмотки синус- но-косинусного трансформаторного датчика 1. Напряжение с выхода блока II деления через второй масштабный уси, 1итель 15 поступает на в.ход вычитания первого сумматора 17, где оно вычитается из напряжения источника 12 эталонного напряжения, проп ед1ие1 о первый масштабный усилитель 13. Напряжение с выхода второг о масштабного усилителя 15 поступает на первый вход cyMvuipoBatniH непосредственно и
третий вход суммирования второго сумматора 18 через первый управляемый масштаб ный усилитель 14 с дискретным изменением коэффициента усиления. Напряжение с выхода первого сумматора 17 через второй управляемый маси1табный сили1ель 16 с дискретным изменением коэффициента усиления поступает на второй вход суммирования второго сумматора 18. Величины дискретно изменякмцихся зпаче1 ий циентов усиления первого 14 и BToporcj 16 управляемых масштабных усилителей выбраны так, что на выходе Brriporo сумматора 18 получается напряжение, линейно изменяющееся в функции угма повор :.)та ротора синуспо-косинусного трансформаторно- () датчика 1. 2 и, 1., 1 таб.т
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь угол-код | 1973 |
|
SU450217A1 |
| БЫСТРОДЕЙСТВУЮЩИЙ МНОГОФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД ДЛЯ УСТРОЙСТВ ЭЛЕКТРОМЕХАНОТРОНИКИ | 1994 |
|
RU2094945C1 |
| Преобразователь угол-код | 1986 |
|
SU1336242A1 |
| Преобразователь угол-код | 1973 |
|
SU458846A1 |
| Преобразователь сигналов синусно-косинусного датчика угла в код | 1982 |
|
SU1034059A1 |
| Устройство для управления шаговым электродвигателем с дроблением шага | 1987 |
|
SU1417162A1 |
| Функциональный преобразователь угла поворота вала в код | 1978 |
|
SU748480A1 |
| Преобразователь угла поворотаВАлА B КОд | 1979 |
|
SU849262A1 |
| Двухотсчетный преобразователь угла поворота вала в код | 1985 |
|
SU1269265A1 |
| Устройство для управления шаговым электродвигателем | 1987 |
|
SU1520647A1 |
Изобретение относится к измерительной технике. Целью изобретения является повышение достоверности преобразования за счет исключения скачков выходного сигнала на границах октантов. На вход синусно-косинусного трансформаторного датчика 1 подается переменное напряжение с источника 3 опорного напряжения. Селектор 2 октантов управляет двухпозиционным переключателем 4, обеспечивая в нечетных октантах подключение синусной обмотки к первому демодулятору 9, а косинусной обмотки к второму демодулятору 10, в четных октантах подключение к первому демодулятору 9 косинусной обмотки, а к второму демодулятору 10 синусной обмотки синусно-косинусного трансформаторного датчика 1. Напряжение с выхода блока 11 деления через второй масштабный усилитель 15 поступает на вход вычитания первого сумматора 17, где оно вычитается из напряжения источника 12 эталонного напряжения, прошедшего первый масштабный усилитель 13 . Напряжение с выхода второго масштабного усилителя 15 поступает на первый вход суммирования непосредственно и третий вход суммирования второго сумматора 18 через первый управляемый масштабный усилитель 14 с дискретным изменением коэффициента усиления. Напряжение с выхода первого сумматора 17 через второй управляемый масштабный усилитель 16 с дискретным изменением коэффициента усиления поступает на второй вход суммирования второго сумматора 18. Величины дискретно изменяющихся значений коэффициентов усиления первого 14 и второго 16 управляемых масштабных усилителей выбраны так, что на выходе второго сумматора 18 получается напряжение, линейно изменяющееся в функции угла поворота ротора синусно-косинусного трансформаторного датчика 1. 2 ил., 1 табл.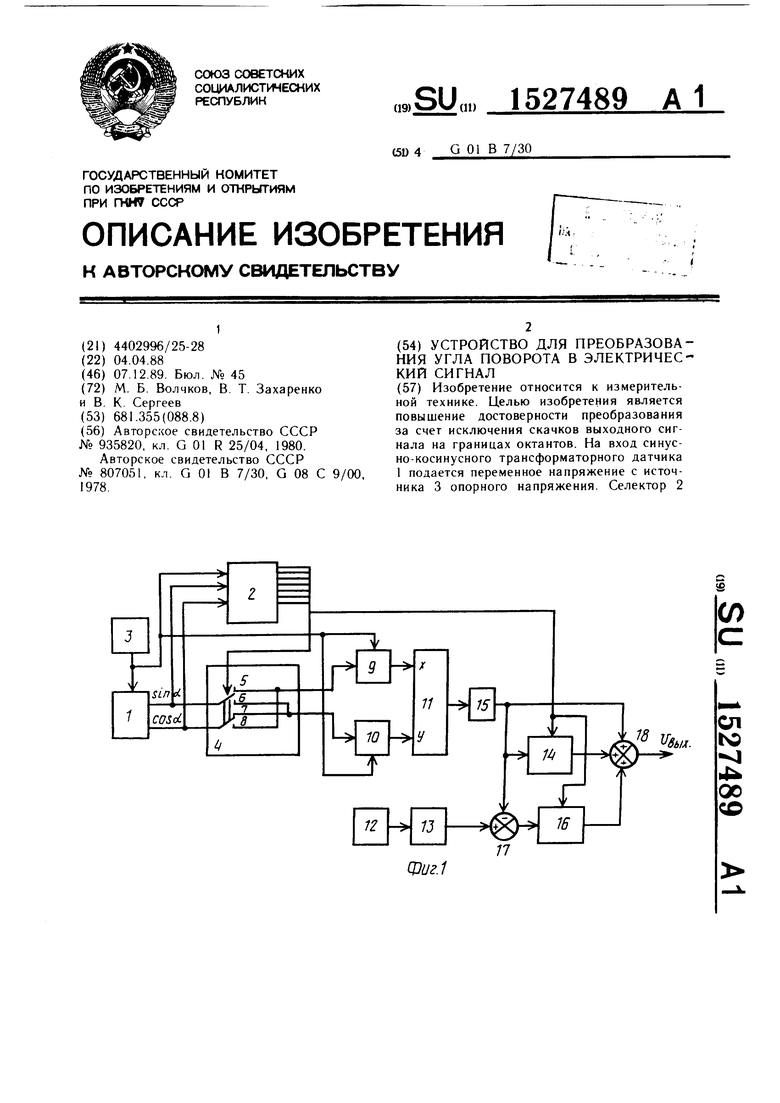
Изобретение относится к измерительной те.хнике и может быть использовано в образовате.1ях yr.ioBoi o перемешепия, например в ycTpoiicTHax сопряжения датчиков угла с ана. 101Ч)-цифров1 1ми преобразонателя- .ми.
Целью изобретенияявляется повышение достоверности преобразования за счет исключения скачков В1 1ходног() сигна.к) па гра ни пах октантов.
На фиг. 1 пр1мстан,1ена струкгурная схема устройства; па (f)ni. 2 пн.) ныхч,- ных напряжений б.юков ус-тройства
В таб,пипе предсгавлепы не.1ичины .uic кретно изменяющихся .(пачоний ко :|ффицие 1 тов /) и III. опреде:1як)|цих ко :((Ьфици1.ч: i усиления первого и вгоро1Ч) управляемых масштабных уси.ште. Н й. а также ве.шчинг функции преобразоваПИЯ. формируем) вго рым сумматоро.м.
Устройство содержи г си ну с по-косинус ный трансформаторный дагчик 1, селектор 2 октантов, источник 3 (мюрпого напряжения, двухпозиционный переключатель 4 с первыми нормально замкнутым 5 и нормально разомкнутым 6 контактами и вторыми нормально замкнугы.м 7 и нормально разомкнутым 8 контактами, первый демоду.1ятор 9, второй демоду. штор 10, блок II де,1енпя, источник 12 ута. юпного напряжения, первый масштабный усилите.1ь 13, первый уи)ав. 1я- емый масштабный усилитель 14 с дискретным из.менением коэффициента уси,, второй масштабный усилитель 15, второй управляемый масштабный усилитель 16 с дискретным изменением коэффициента уси.тения, первый 17 и второй 18 сумматоры.
Устройство работает следующим образом.
На вхОлТ синусно-косинусного трансфо)- маторного датчика 1 подают с ист(;чника 3 опорного напряжения переменное напряжение синусоидальной формьг Напряжения с выходов СИНУСНОЙ и косинусной обмоток
5
5
0
5
0
5
(j косинусного т)а 11С({)ОрК1аторного ..;. чика 1 вместе с 4a ;pH/f,eHneM иск чпик;. 5 оп()|)ного напряжомия ( г- цают на вх(.д ce.4CKi())a 2 oKTaHTOii для ()преде,чения по- Mt pa октанта, в котором находится ротор синуснс. косинусного тра . сфор.маторного дат чика 1, иьгходные сигналы синусной и косинусной об.моток которого 4eps. 3 двухпози ционпый переключ f.ib 4 поступают соответ :.твсипо на иеррме входы первого 9 и кто рого К) де.моду. 1яторов, на вторые в.ходы KOTOpijix поступает сигнал с источника 3 liiiopiioro напряжения. На выходах первого 9 м вго|)ого 10 демодуляторов формируются |1.;.рнжеп11я постоянного тока, пропо)цио- налыиле синусу и К(;синусу угла поворота poroj .a сипусно-косинусного грансформатор- н(.)1 о датчика 1. Эти сигналы поступают в блок 11 деления, па выходе которого формируется напряжение постоянного тока, пропорциональное тангенсу или котангенсу уг ла поворота ротора синусно-косин) сно1 о трансформаторного датчика 1. При этом напряжения, соответствуюшие тангенсу и ко тангенсу, не зависят от питающего напряжения и коэффициента трансформации синус- но-косинусного трансфор.маторпого датчика 1.
Однако функции тангенса и котангенса ;:инейны только на относительно малом участке. В связи с этим селектор 2 октантов в нечетн1)Г октантах своим выходным сигналом управ.чяет так двухпозиционным переключателем 4, что он обеспечивает в этих октапта.х подключение выходного сигнала синусной обмотки на демодулятор 9, а сигнала косинусной обмотки - на второй демодулятор 10.
При этом на выходе блока 11 деления- формируется функция тангенса угла поворота ротора синусно-косинусно1 о трансформаторного датчика I.
В четных октантах селектор 2 октантов обеспечивает через двухпозиционный переключатель 4 подключение к первому демодулятору 9 косинусной обмотки, а к второму демодулятору 10 - синусной обмотки синусно-косинусного трансформаторного датчика 1, в результате чего на выходе блока 1 1 деления формируется функция когангенса гла поворота ротора синусно- косинусиою трансформаторного датчика I.
Напряжение с блока 11 деления, максимальное значение которого соответствует единице (условно) выходного напряжения второго сумматора 18, через второй масштабный усилитель 15 с коэффициентом усиления поступает на вход вычитания 8
первого сумматора 17, в котором оно вычитаемся из иаг111яжения источника 12 эталонного напряжения, прошедшего первый мас- ujTafinbiii усилитель 13 с коэффициентом
усиления ,. Величина напряжения исо
очника 12 эта;1онного напряжения выби- ((.метси )аин()й максимальному значению выходного напряжения второго сумматора 18, условно принятому за единицу {для поворот;) ротора датчика I, равному 360°).
Иа11ряжение с выхода второго масштабного усилителя 15 поступает на первый вход суммирования непосредственно и на третий BX v, суммирования второго сумматора 8 ч(-( с: первый управляемый масштабный - -|1лите. 1ь 14 с коэффициентом усиления Н ------2-п.
Напряжение с выхода первого сумматора 17 чсрг , второй управляемый масштабный усилитель 16 с коэффициентом усиления i,, 2-in поступает на второй вход сум- ми 1оваиия второго сумматора 18.
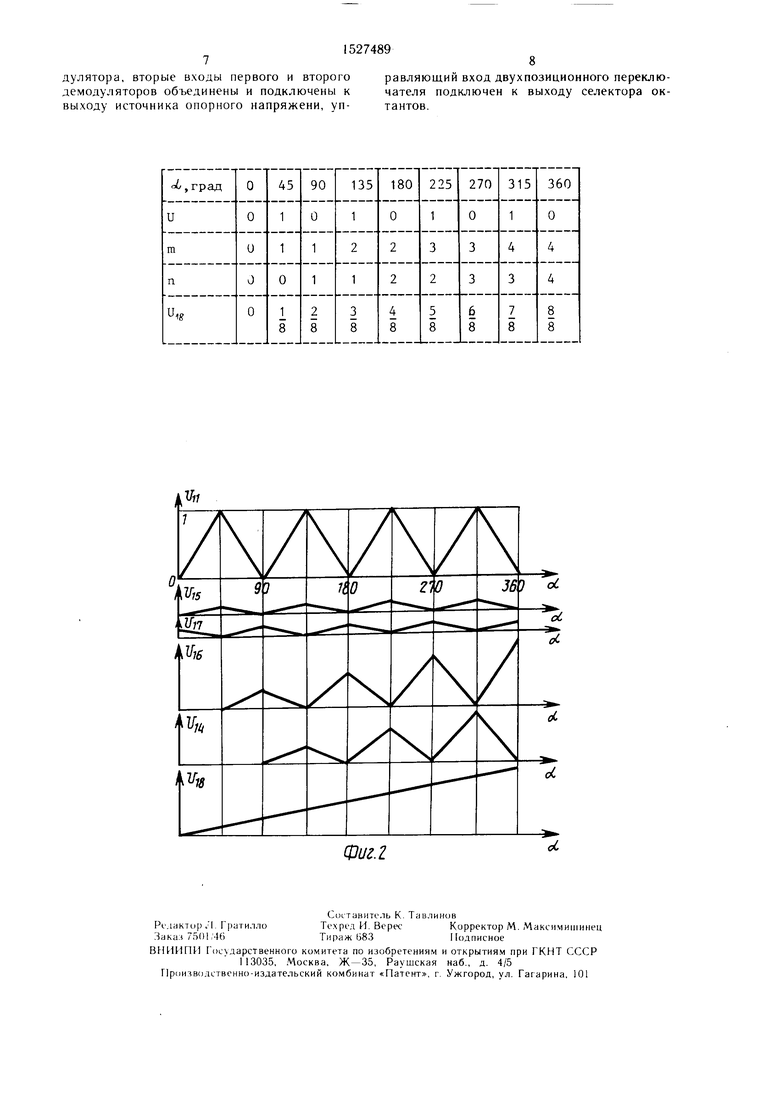
В(-лкчины дискретно изменяющихся значений коэффициентов усиления первого 14 и BTopoi tj К) управляемых масштабных уси- лигел(Н1 и ФУНКЦИИ преобразования с выхода второго 1ас1 1табного усилителя 15 и вто- |) (лм.матора 18 для значений угла по- ; r-)iyiii 111,гора синусно-косинусного трансфор- M,Toi,.40io датчика 1, равных О, 45, 90, 135, 18Г, 22. 2/0, 315, 360, представлены в Tafi. i мне.
11ри iiorvi на вых()де второго сумматора 18 получается напряжение постоянно- то I OK.-. .и.тпейно изменяющееся в функции 1ла .)та ротора синусно-косинусного трансфо 5маторного датчика 1 и не имеющее скачков напряжения, отсутствие которых в .одт1ом напряжении устройства объясняется I .v что коэффициент усиления пер- нпгч) у|;;;;;1;ляемого масштабного усилителя 14 лискрг- гно изменяется в тот момент, iia его входе значение функции пре- обр; ,Н вания равно нулю, а коэффициент
0
усиления второго управ.пяемого мас1птабно- го усилителя 16 дискретно изменяется также в тот момент, когда на его входе сигна. т с выхода первого сумматора 17 равен нулю.
Формула изобретения
Устройство для ттреобразования углн тю- в электрический (,т1гнал, содер/кгчцее сииусн(;-косинусный траHcitKipMзторИый датчик, селектор октантов, источник опорного напряжения, подключент1ьп1 к входу синусно-косинусного трансформаторного датчика и к первому входу селектора октантов, второй и третий входы которого подg ключены соответственно к выходам синусной и косинусной обмоток синусно-косинусного трансформаторного датчика, первый и второй демодуляторы, тюследовательно соединенные источник эталонного наттряжения, первый масштабный усилитель и первый
0 сумматор и первый управляемый масштабный усилитель с дискретным изменением коэффициента усиления, управляющий вход которого подключен к выходу селектора октантов, отличающееся тем, что, с целью
5 повышения достоверности преобразования, оно снабжено двухпозиционным переключателем, блоком деления, вторым масштабным усилителем, вторым управляемым мас- тптабным усилителем с дискретным изменением коэффициента усиления и вторым
0 сумматором, первый вход суммирования которого Т1одк.чючен к входу вычитания первого сум.матора, входу перво1Ч) управляемого масштабного усилителя с дискретным изменением коэффициента уст1,1ения и выходу второго масштабного yen,1иге,1я. вход ко5 торого тюдключен к выходу блока деления, входы которого подключены соответственно к выходам первого и второго демодуляторов, выход первого сумматора подключен к входу второго , тяемого масп1табно- го усилителя с дискретным изменением коэ(рфит1иента усиления, управляющи вход которого подключен к управляющему входу первот о управляемого масштабного усилителя с дискретным т1зменением коэффициента усиления, а выходк второму
5 входу суммирования второго сумматора, третий вход суммирования которого тюдключен к выходу второго уттравляемого маститабно- го усилителя с дискретным изменением коэффициента усиления, гтервьтй и второй подвижные контакты дти хпозитиюнного пере0 ключателя подключе|ты соответственно к выходам синусной и косинусной обмоток синусно-косинусного трансформаторного датчика, первый нормалтпто замкнут11и | контакт - к второму норма,и,но разомютутому контакту и первому входу гтервого демоду.тя- тора, первый норма,1ьно разомк}тутый контакт -- к второму нормально замкнутому контакту и первому вход второго демо0
1527489 78
дулятора, вторые входы первого и второгоравляющий вход двухпозиционного переклюдемодуляторов объединены и подключены кчателя подключен к выходу селектора оквыходу источника опорного напряжени, уп-тантов.
Фиг. 2
| Способ измерения угла поворота ротора синусно-косинусного вращающегося трансформатора | 1980 |
|
SU935820A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ преобразования угла поворотаВ НАпРяжЕНиЕ | 1978 |
|
SU807051A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
