6 3
ел to
00 оо
0 CD
И:1()претение относится к сельскохозяйст- 1нч111ому машиностроению и предназначено ,1,И1 акгоматического слежения за движением чаесборочных анпаратов относительно поверхности чайных шпалер.
lie.ib изоГфетения - повышение точности слежения, уменынение иовреждаемости фле- iit ii. повышение быстродействия, уровня ав- loMaiилании управления чаесборочной машины и качества чайного сырья.
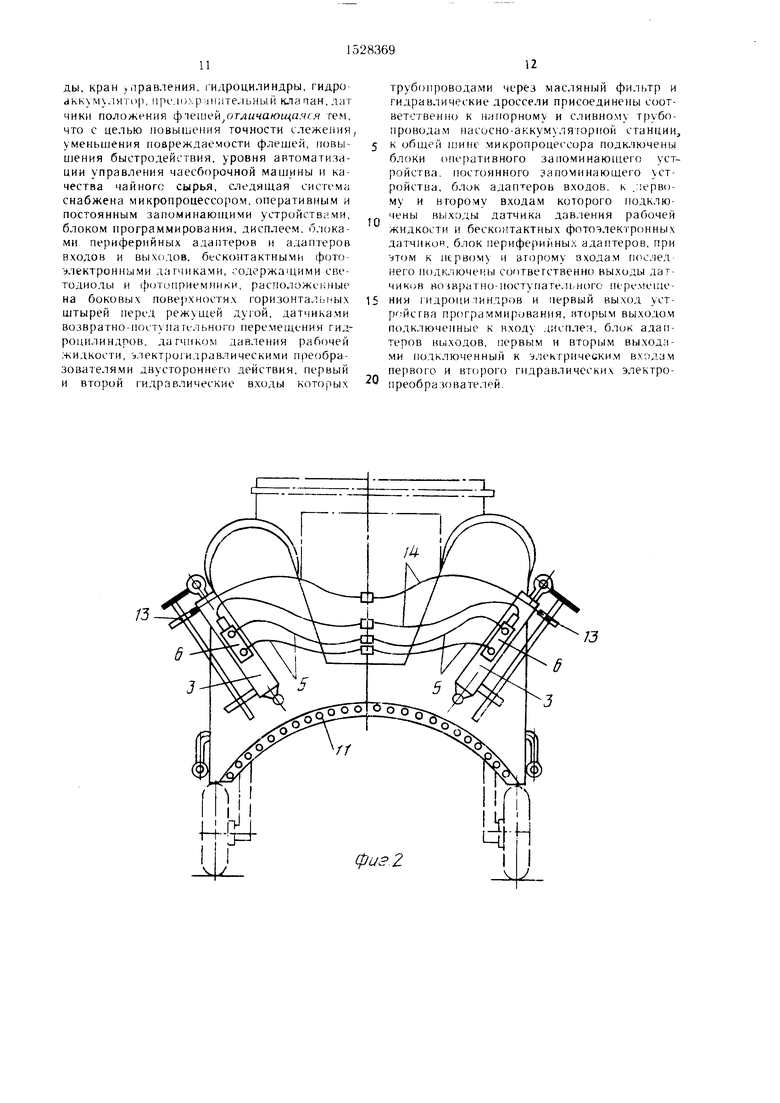
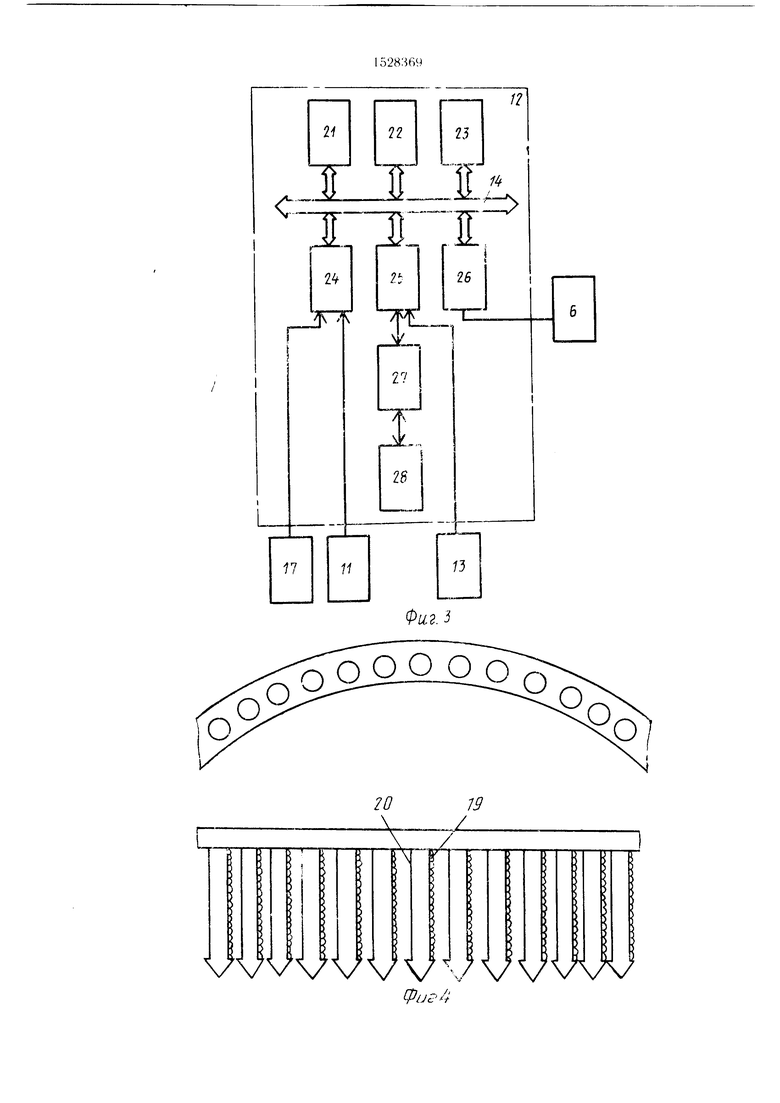
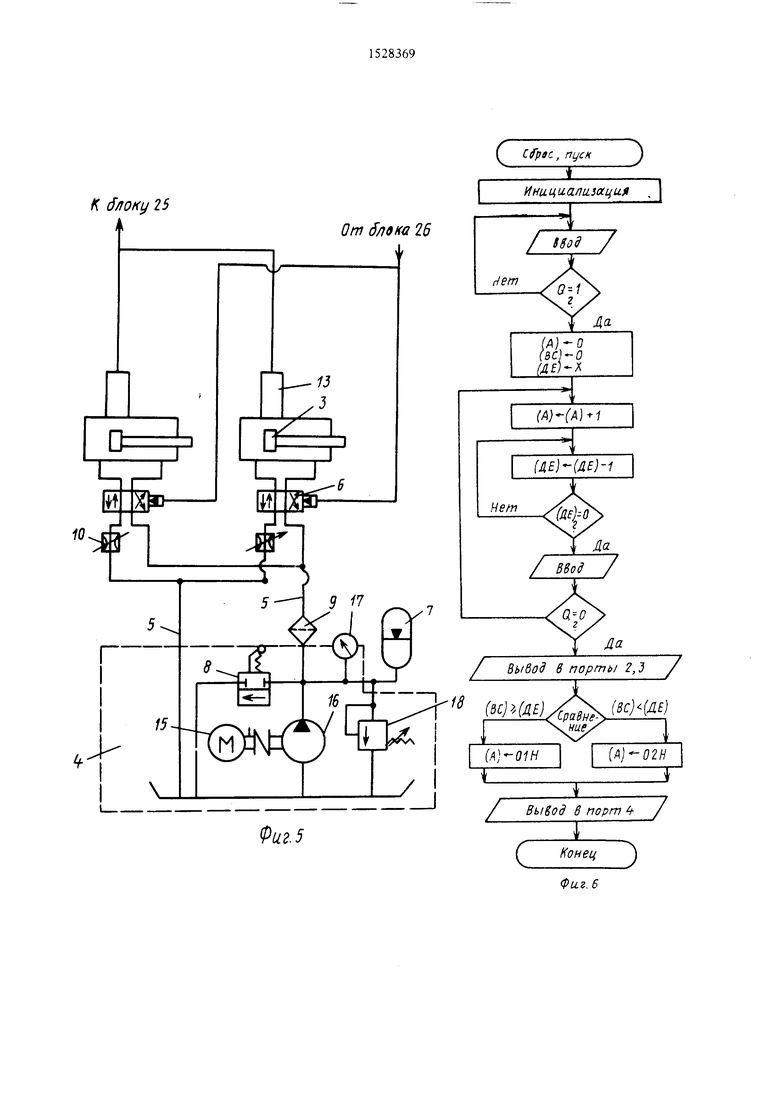
На фи|-. 1 показана следящая система, (lOHUiii вил; па фиг . 2 . то же, вид спереди, па фи1 . Лблок-схема функцио- ;i;i.ii ijui , с|-р -ктуры с;1едяним1 сис 1 емы; па ({)П1. 4 схема расположения светодиодов п фотоприемников (фотоэлектронных датчиков .чо.южения) на боковых поверхностях iHTbipeii; па фпг. 5 - функциональная схема гидропривода следящей системы; на фи1. () б.ток-схема алгоритма работы микропроцессорного устройства при измерении и индикации временного интервала; на фиг. 7 пример реализации фото- :)лектр()ПН()го датчика.
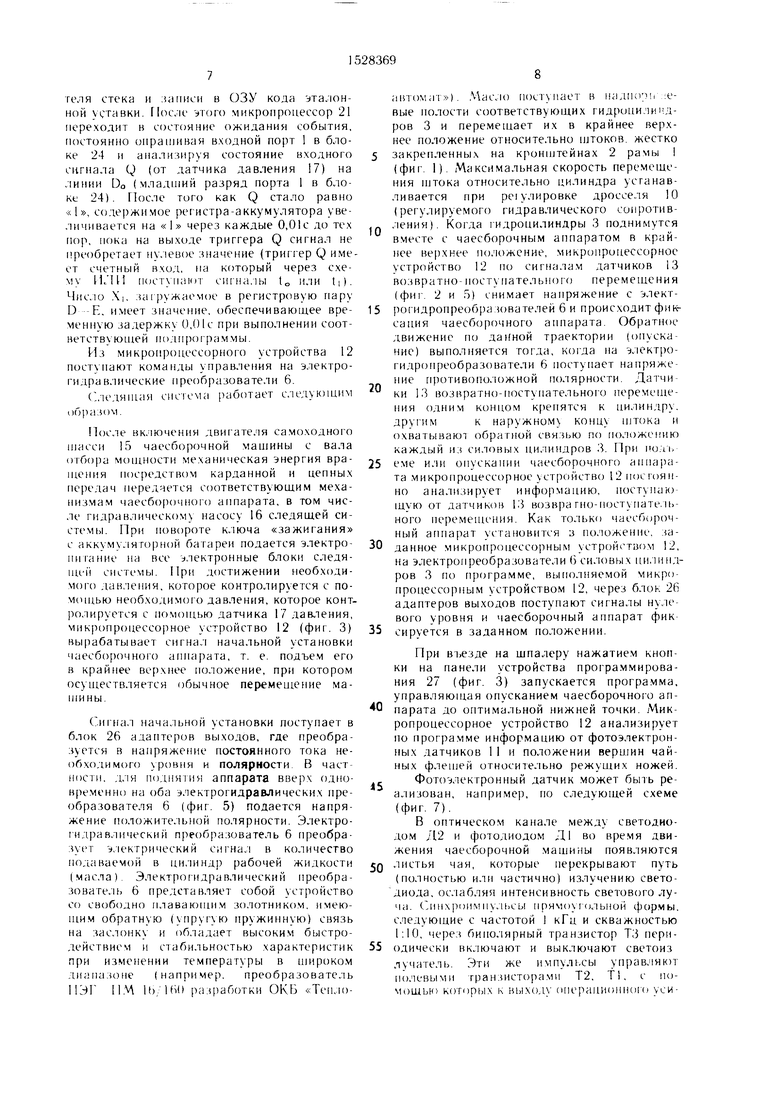
(.1едя1цая система чаесборочных машии 1ФП1. 11 содержит закрепленные на раме I к|1()Н111тейны 2, на которых установлены спловые гидроцилиндры 3 двустороннего дейсгвия, насосно-аккуму.чяторную станцию 4, соединенную через нагнетающий и c.iiiHHoii трубопроводы 5 с электрогидрав- 1пч1 скимп преобра; ователями 6 двусторонне- 10 действия, а через них - с подпорнше- iHiiMH и надпоршневыми полостями силовых гпдропилиндров 3.
К нагнетаюн|ему трубопроводу иодклю- чины гидроаккумулятор 7 кран 8 управления и мас.1яный фильтр 9.
На каждом трубопроводе 5 низкого давления, соединяюн1ем электрогидравлический преобраз()вате,1ь 6 с насосно-аккумулятор- пой станцией 4, установлены дроссели 10, представляюпи1е собой регулируемые гидравлические )Тивления, с помощью которых можно изменять количество жидкости, выходяп1ей из соответствующего гидроци- .1индра. а следовательно, и скорость движения поршня.
На неподвижной дуге чаесборочной гребенки крепятся 30 - 40 щтырей, на боковых поверхностях которых расположены фотоэлектронные датчики 11, связанные с микропроцессорным устройством 12.
К микропроцессорному устройству 12 подсоеднпены также электрические выходы алектрогидравлических преобразователей 6 и датчиков 13 возвратно-поступательного пере-.кмцения силовых цилиндров 3 (фиг. 2).
Фотоэлектронные датчики 11 связаны с микропроцессорным устройством 12 посредством П1ИНЫ 14 (фиг. I и 2). Двигатель 15 (фиг. 5) самоходного 1насси связан через вал отбора мощности с гидравлическим насосом 16. Датчик 17 указывает давление, ;Ч).1даваемое насосом.
В насосно-аккумуляторной станц :: 4 установлен предохранительный клапан i8 (фнг. 5), соединяющий трубопровод высокого давления с трубопроводом низкого давлепия.
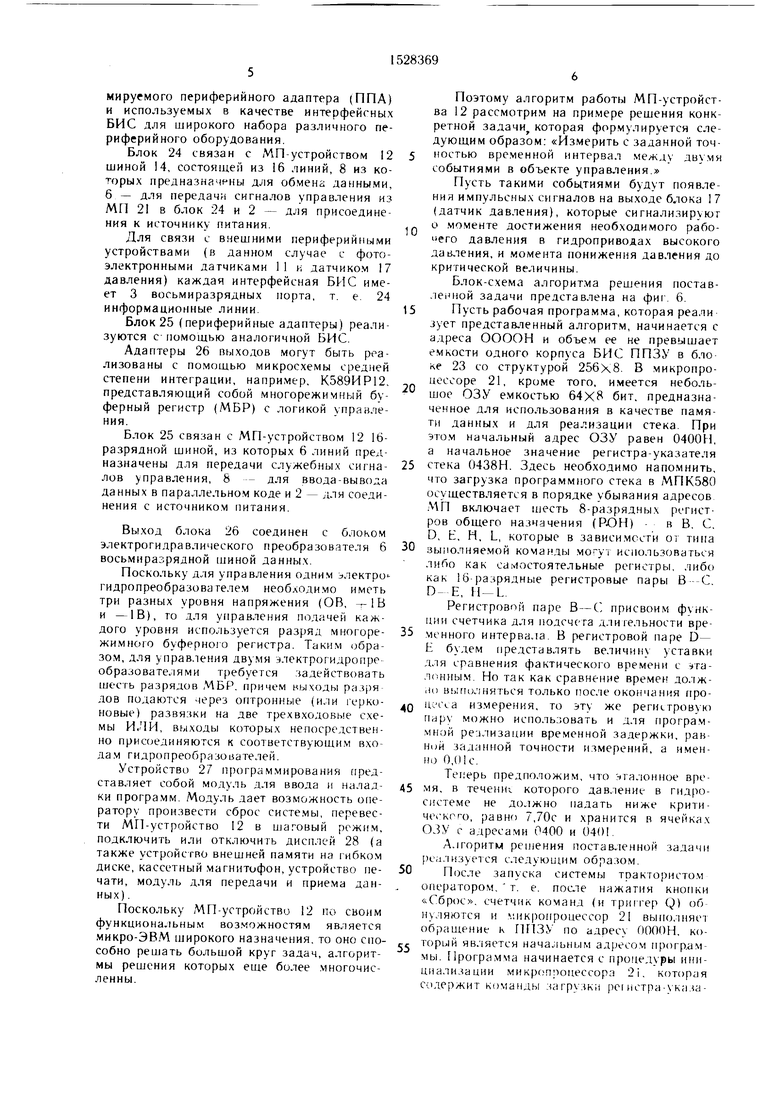
Микропроцессорное устройство 12, в которое поступает информация от фотоэлектронных датчиков 11, состоящих из светодиодов 19 и фотоприемников 20, включает следующие блоки: микропроцессор 21, оперативное запоминающее устройство 22, иерепрограммируемое постоянное запоминающее устройство 23, адаптеры 24 входов, периферийные адаптеры 25, адаптеры 26 вьгчодов, устройство 27 программирования,
5 дпсиле .
ЛАикропроцессо 1 21 через общую шину соединен с блоками оперативного запоминающего устройства 22, перенрограммируемо го постоянного запоминающего устройстQ ва 23, адаптеров 24 входов, периферийных адаптеров 25, адаптеров 26 выходов. Фотоэлектронные датчики 11 и датчик давления 17 подсоединены к блоку 24 адаптеров входов, а к блоку периферийных адаптеров 25 через блок 27 устройст5 ва программирования подсоединен дисплей 28 и датчики КЗ возвратно-поступательного перемещения.
Микропроцессорное (МП) устройство 12 яв.тяется мпо1Ч)функциональным вычисли0 тельным устройством с гибкой внутренней программно-управляемой структурой с применением широкого набора БИС (например, из микропроцессорного комплекта К 580).
Микропроцессор 21 является основным функциональным узлом, реализующим логи5 ческие и арифметические операции, а также генерирующим команды для управления периферийными структурами. В качестве микропроцессора 21 используется больщая интегральная схема (БИС), например, се. рии КР 580 ИК80А, которая выполняет 70 различных команд, не считая их модификаций. Длина слова микропроцессора 8 разрядов (один байт).
Микропроцессор 21 предназначен для работы с оперативным запоминающим уст5 ройством (ОЗУ) 22 и перепрограммируемым постоянным запоминающим устройством (ППЗУ) 23 с общей емкостью до 64 килобайт, ОЗУ 22 емкостью 16 Кбайт может быть собрано на 16 микросхемах, например, типа К565РУЗА, а ППЗУ 23 ем0 костью 8Кбайт - на базе микросхем типа К573 с ультрафиолетовым стиранием информации.
Блок 24 адаптеров входов предназначен для организации связи фотоэлектронных датчиков 11 с микропроцессорным уст ройством 12.
Блок 24 может быть реализован с помощью нескольких БИС, например, серии К580ВВ55, выполняющих функции программируемого периферийного адаптера (ППА) и используемых в качестве интерфейсных БИС для широкого набора различного периферийного оборудования.
Блок 24 связан с МП-устройством 12 шиной 14, состоящей из 16 линий, 8 из которых предназначены для обмена данными, 6 - для передачи сигналов управления из МП 21 в блок 24 и 2 - для присоединения к источнику питания.
Для связи с внешними периферийными устройствами (в данном случае с фотоэлектронными датчиками 11 и датчиком 17 давления) каждая интерфейсная БИС имеет 3 восьмиразрядных порта, т. е. 24 информационные линии.
Блок 25 (периферийные адаптеры) реализуются с помощью аналогичной БИС.
Адаптеры 26 выходов могут быть реализованы с помощью микросхемы средней степени интеграции, например, К589ИР12, представляющий собой многорежимный буферный регистр (МБР) с логикой управления.
Блок 25 связан с МП-устройством 12 16- разрядной шиной, из которых 6 линий предназначены для передачи служебных сигналов управления, 8 - для ввода-вывода данных в параллельно.м коде и 2 - для соединения с источнико.м питания.
Выход блока 26 соединен с блоком электрогидравлического преобразователя 6 восьмиразрядной шиной данных.
Поскольку для управления одним ллeктpo гидропреобразователем необходимо иметь три разных уровня напряжения (ОВ, -1В и -1В), то для управления подачей каждого уровня используется разряд многорежимного буферного регистра. Таки.м «образом, для управления двумя электрогидропре- образователями требуется задействовать шесть разрядов МБР. причем выходы ра:)я дов подаются через оптронные (или герко- новые) развязки на две трехвходовые схемы И.ПЙ, выходы которых непосредственно присоединяются к соответствующим входа.м гидропреобразователей.
Устройство 27 программирования представляет собой модуль для ввода и наладки программ. Модуль дает возможность оператору произвести сброс системы, перевести МП-устройство 12 в шаговый режим, подключить или отключить дисплей 28 (а также устройство внешней памяти на гибко.м диске, кассетный магнитофон, устройство печати, модуль для передачи и приема данных) .
Поскольку МП-устройство 12 по своим функциональным воз.чожностям является микро-ЭВМ широкого назначения, то оно способно решать большой круг задач, алгоритмы решения которых еще более многочисленны.
Поэтому алгоритм работы МП-устройства 12 рассмотрим на примере решения конкретной задачи, которая формулируется следующим образом: «Измерить с заданной точностью временной интервал между двумя событиями в объекте управления.
Пусть такими событиями будут появлении импульсных сигналов на выходе блока 17 (датчик давления), которые сигнализируют
,. о моменте достижения необходимого рабо- t ero давления в гидроприводах высокого давления, и момента понижения давления до критической величины.
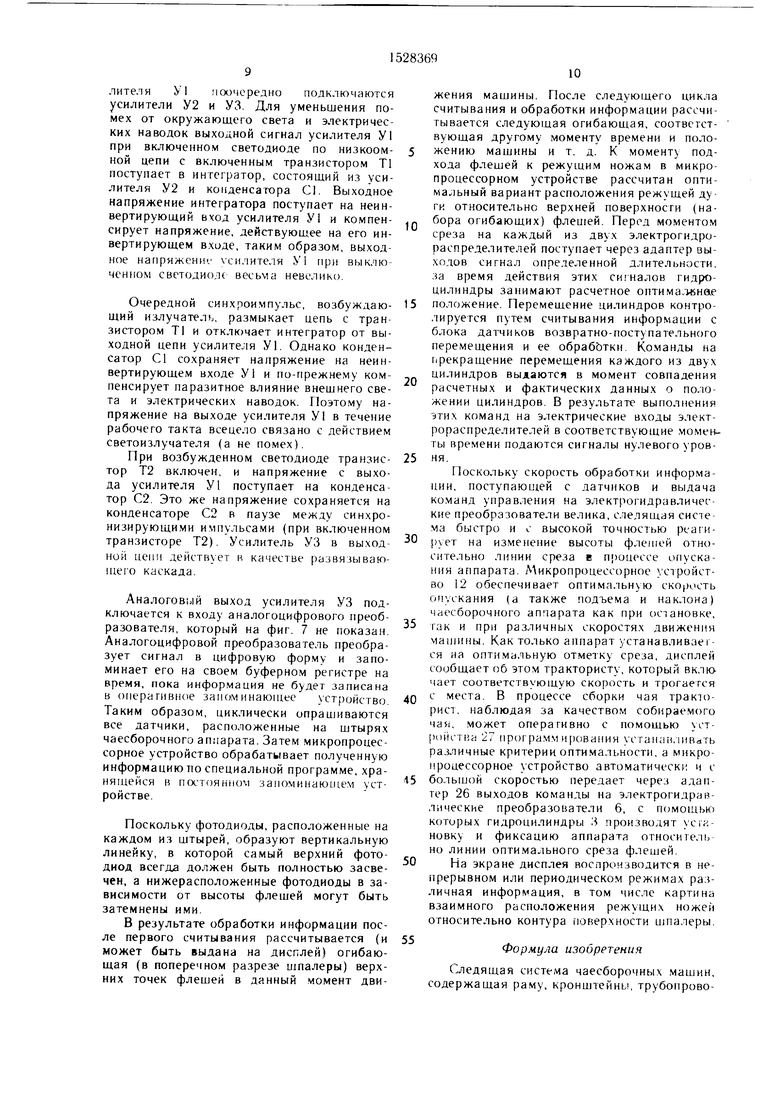
Блок-схема алгоритма решения постав- задачи представлена на фиг. 6.
Пусть рабочая программа, которая реали
зует представленный алгоритм, начинается с адреса ООООН и объе.м ее не превышает емкости одного корпуса БИС ППЗУ в бло не 23 со структурой 256X8. В микропроцессоре 21, кроме того, имеется небольшое ОЗУ емкостью 64X8 бит, предназначенное для использования в качестве памяти данных и для реализации стека. При это.м начальный адрес ОЗУ равен 0400П, а начальное значение регистра-указателя
5 стека 0438Н. Здесь необходимо напомнить, что загрузка программного стека в МПК580 осуществляется в порядке убывания адресов П включает шесть 8-разрядных регистров общего назначения (РОН) - в В, С, D, Е, Н, L, которые в зависимости or типа
0 выполняемой команды . использоваться либо как самостоятельные регистры, либо как 16-разрядные регистровые пары В --С. D- Е, li-L.
Регистровой паре В-С присвоим функции счетчика для подсчета длительности вре5 менного интервала. В регистровой паре D- Н будем представ,лять величину уставки для сравнения фактического времени с ira- . Но так как сравнение времен должно В,г1олняться только после окончания про0 цсчча из.мерения, то эту же региетровую пару можно использовать и для программной ре:1лизации временной задержки, равной заданной точности измерений, а и.мен- но 0,01с.
Теперь предположим, что :- талонное вре5 мя, в течение которого дав,1ение в гидросистеме не должно падать ниже критического, равно 7,70с и хранится в ячейках ОЗУ с адресами 0400 и 0401.
Алгоритм реп1ения поставленной задачи реализуелся следуюии1М образом.
0 После запуска системы трактористо.м оператором. т. е. после нажатия кнопки «Сброс, счетчик команд (и триггер Q) обнуляются и микропроцессор 21 выполняет обращение к ПГТЗУ по адрес ООООН, кос торый яв. 1яется начальным адресом програ.м- мы. Программа начинается с процедуры инициализации микропроцессора 21, которая содержит команды загрузки pei истра-ука.ателя стека и записи в ОЗУ кода эта. юн- ной уставки. После этого микропроцессор 21 переходит в состояние ожидания события, постоянно опрашивая входной порт 1 в блоке 24 и апализируя состояние входного сигнала Q (от датчика давления 17) на линии DO (младший разряд порта 1 в блоке 24). После того как Q стало равно «1, со.чержимое регистра-аккумулятора увеличивается на «I через каждые 0, до тех пор, пока на выходе триггера Q сигнал не преобретает нулевое значение (тригтер Q имеет счетный вход, на который через схе- MV IL UI поступают сигна,1ы „ пли ti). Число X, загружаемое в регистровую пару D -F., имеет значение, обеспечивающее временную задержку 0,01с при выполнении соответствующей подпрограм.мы.
Из микропроцессорного устройства 12 поступают команды управления на электро- гндравлнческие преобразователи 6.
(, 1едяп1ая система работает следующим образом.
После включения двигателя самоходного шассн 15 чаесборочной машины с вала отбора мощности механическая энергия вра- п;епия посредством карданной и цепных передач передается соответствующим меха- пизмам чаесборочного аппарата, в том числе гидравлическому насосу 16 следящей системы. При повороте ключа «зажигания с аккумуляторной батареи подается электро- питание на все :)лектронные блоки следя- meit системы. При достижении необходимого давления, которое контролируется с по- М(мп.ью необходимого давления, которое контролируется с помощью датчика 17 давления, мпкрс)процессорное устройство 12 (фиг. 3) вырабатывает сигна.т начальной установки чаесборочного агшарата, т. е. подъем его в крайнее верхнее положение, при котором осуществляется обычное перемещение машины.
(л1гнал начальной установки поступает в блок 26 адаптеров выходов, где преобразуется в напряжение постоянного тока не- об.ходимого ровня и полярности. В частности, для поднятия аппарата вверх одновременно на оба электрогидравлических преобразователя 6 (фиг. 5) подается напряжение положительной полярности. Электро- гид1)авлический преобразователь 6 преобразует электрический сигнал в количество подаваемой в цилиндр рабочей жидкости (масла). Электрогидравлический преобразователь 6 представляет собой устройство со свободно плаваюши.м золотнико.м, имеющим обратную (упругую пружинную) связь на заслонку и об, 1адает высоким быстродействием и стабильностью характеристик при изменении температуры в ц ироком диапазоне (например, преобразователь ПЭГ 11.А lb/l(iO разработки ОКБ «Тепло0
автомат). ЛАасло поступает в надпсгм: le- вые полости соответствующих гидроцили1;д- ров 3 и перемещает их в крайнее верхнее положение относительно штоков, жестко
закрепленных на кронштейнах 2 ра.мы I (фиг. I). Максимальная скорость перемещения щтока относительно цилиндра усганав- ливается при ре1улировке дросселя 10 (регулируемого гидравлического сонротив,. ления). Когда гидроцилиндры 3 поднимутся вместе с чаесборочным аппаратом в крайнее верхнее положение, микропроцессорное устройство 12 по сигналам датчиков 13 возвратно-посту пательно го перемещения (фиг. 2 и Г)) снимает напряжение с элект5 рогндропреобра.зователей 6 и происходит фиксация чаесборочного аппарата. Обратное движение по данной траектории (опускание) выполняется тогда, когда на элект)о- гидропреобразователи 6 поступает напряжение противопо, 1ожной полярности. Датчики 13 возвратно-поступательного перемещения одним концом крепятся к цилиндру, друшмк наружном) концу и
охватывают обратной свя.зью по положению каждый из си,1овых цилиндров ,Ч. При подг,
5 t Me или опускании чаесборочного аппарата микропроцессорное устройство 12 посгоян- но анализирует информацию, поступающую от датчиков 13 возвра гно-поступате.1ь- ного перемещения. Как то.тько чаесборочный аппарат установится з положенне, за0 данное мнкрогтроцессорным устрой тв)м 12, на электропреобразователи ()си,товых ци,1нпд- ров 3 по пр(.)грамме, выполняемой микропроцессорным устройством 12, через блок 2(i адаптеров выходов поступают сигналы нулевого уровня и чаесборочный аппарат фик
5 сируется в заданном положении.
При вт,езде на шпалеру нажатием кнопки на панели устройства программирования 27 (фиг. 3) запускается программа, управляюнгая опусканием чаесборочного аппарата до оптимальной нижней точки. Мик0
ропроцессорное устройство 12 анализирует по программе информацию от фотоэлектронных датчиков 1 1 и положении вершин чайных флешей относите.тьно режущих ножей.
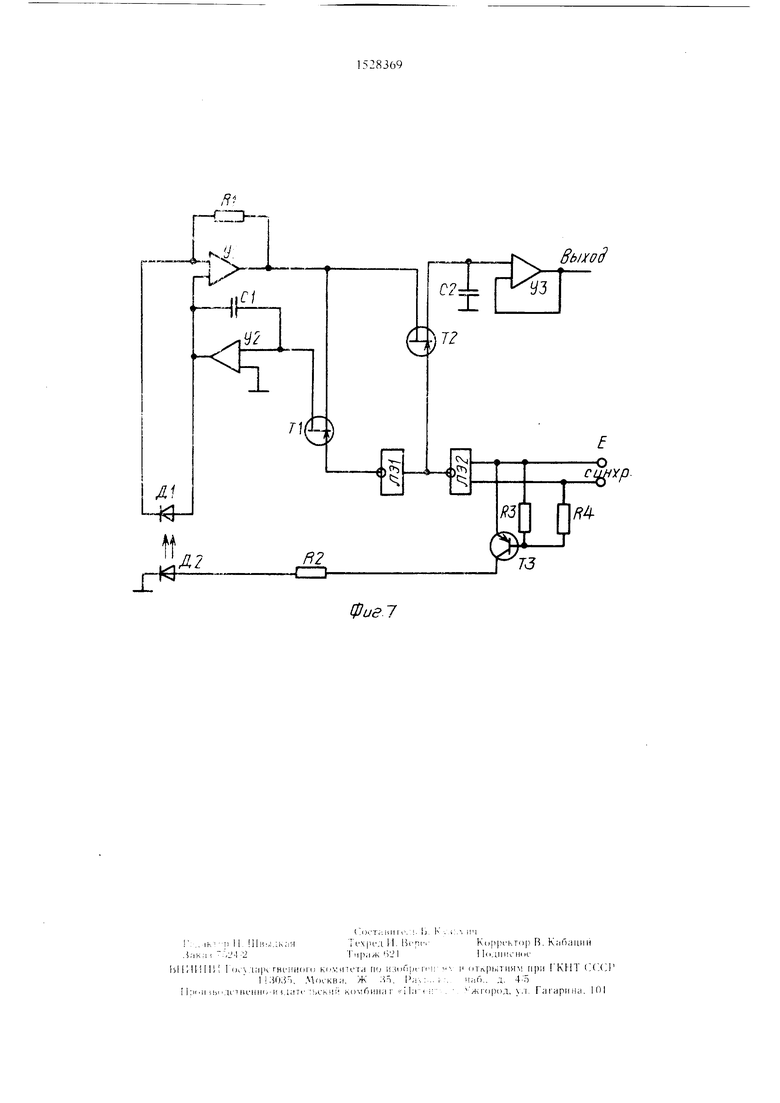
,Фотоэлектронный датчик может быть реализован, например, по следующей схеме (фиг. 7).
В оптическом канале между светодио- дом /12 и фотодиодом Д1 во время движения чаесборочной машины появляются
Q листья чая, которые перекрывают путь (полностью или частично) излучению свето- диода, ос.чабляя интенсивность светового луча. (Л1нхр|)импу.1ьсы прямоугольной формы, следующие с частотой 1 кГц и скважностью 1:10, через бипо.тярный транзистор ТЗ перн5 одически включают и выключают светоиз лучатель. Эти же импульсы управляют по,чевымп транзисторами Т2, Ti, с помощью которых к ныходу onepanitoHiKH o усилителя УI поочередно подключаются усилители У2 и УЗ. Для уменьшения помех от окружающего света и электрических наводок выходной сигнал усилителя У1 при включенном светодиоде по низкоом- ной цепи с включенным транзистором Т1 поступает в интегратор, состоящий из усилителя У2 и конденсатора С1. Выходное напряжение интегратора поступает на неинвертирующий вход усилителя У1 и компенсирует напряжение, действующее на его инвертирующем входе, таким образом, выходное напряжсни , -силителя У1 при выключенном светодиол( весьма невелико.
Очередной синхроимпульс, возбуждающий излучатель, размыкает цепь с транзистором Т1 и отключает интегратор от выходной цепи усилителя У1. Однако конденсатор С1 сохраняет напряжение на неинвертирующем входе У1 и по-прежнему ком- пеисирует паразитное влияние внещнего света и электрических наводок. Поэтому напряжение на выходе усилителя У1 в течение рабочего такта всецело связано с действием светоизлучателя (а не помех).
При возбужденном светодиоде транзистор Т2 включен, и напряжение с выхода усилителя У1 поступает на конденсатор С2. Это же напряжение сохраняется на конденсаторе С2 в паузе между синхронизирующими импульсами (при включенном транзисторе Т2). Усилитель УЗ в выходной цепи действует в качестве развязывающего каскада.
Аналогов1,1Й выход усилителя УЗ подключается к входу аналогоцифрового преобразователя, который на фиг. 7 не показан. Аналогоцифровой преобразователь преобразует сигнал в цифровую форму и запоминает его на своем буферном регистре на время, пока информация не будет записана в операгивное запоминающее стройство. Таким образом, циклически опращиваются все датчики, расположенные на щтырях чаесборочного аппарата. Затем микропроцессорное устройство обрабатывает полученную информациюпо специальной программе, хранящейся в постоянном запоминающем устройстве.
Поскольку фотодиоды, расположенные на каждом из щтырей, образуют вертикальную линейку, в которой самый верхний фотодиод всег.да должен быть полностью засвечен, а нижерасположенные фотодиоды в зависимости от высоты флещей могут быть затемнены ими.
В результате обработки информации после первого считывания рассчитывается (и может быть выдана на дисплей) огибающая (в поперечном разрезе щпалеры) верхних точек флещей в данный момент движения мащины. После следующего цикла считывания и обработки информации рассчитывается следующая огибающая, соответствующая другому моменту времени и положению мащины и т. д. К моменту подхода флещей к режущим ножам в микропроцессорном устройстве рассчитан оптимальный вариант расположения режущей дуги относительно верхней поверхности (на,. бора огибающих) флешей. Перед моментом среза на каждый из двух электрогидро- распределителей поступает через адаптер вы- .ходов сигнал определенной длительности, за время действия этих сигналов гидроцилиндры занимают расчетное оптима.
положение. Перемещение цилиндров контролируется путем считывания информации с блока датчиков возвратно-поступательного перемещения и ее обрабЬтки. Команды на прекращение перемещения каждого из двух цилиндров выдаются в момент совпадения расчетных и фактических данных о положении цилиндров. В результате выполнения этих команд на электрические входы электрораспределителей в соответствующие моменты времени подаются сигналы нулевого уров5 ня.
Поскольку скорость обработки информации, поступаюпхей с датчиков и выдача команд управления на электрогидравлические преобразователи велика, следящая систе ма быстро и с высокой точностью реаг И0 рует на изменение высоты флешей относительно линии среза в процессе опускания аппарата. Микропроцессорное устройство 12 обеспечивает оптимальную скорость опускания (а также подъема и наклона) чаесборочного аппарата как при остановке,
5 гак и при различных скоростях движения мапп1ны. Как только аппарат устанавливается на оптимальную отметку среза, дисплей сообщает об этом трактористу, который включает соответств ющую скорость и трогается
Q с места. В процессе сборки чая тракторист, наблюдая за качеством собираемого ча«, может оперативно с помощью ст- юйства 27 програм.м ирования устанан.швлть различные критерии оптимальности, а микропроцессорное устройство автоматически и с
5 больщой скоростью передает через адаптер 26 выходов команды на электрогидравлические преобразователи б, с помощью которых гидроцилиндры 3 производят усгл- новку и фиксацию аппарата относигел) но линии оптимального среза флещей.
0На экране дисплея воспроизводится в непрерывном или периодическом режимах различная информация, в том числе картина взаимного расположения режущих ножей относительно контура пог)ерхности шпалеры.
55
Формула изобретения
Следящая система чаесборочных мащин, содержащая раму, кронштейны, трубопрово11
12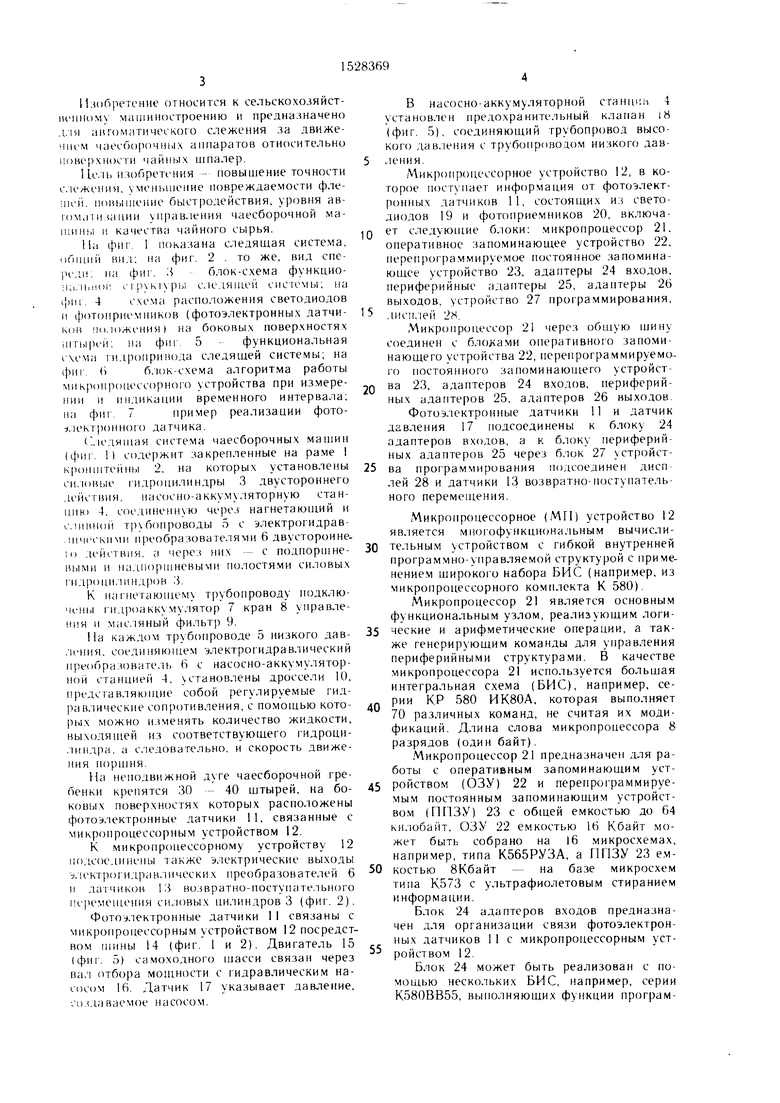
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения температуры | 1984 |
|
SU1229600A1 |
| Модуль режущего аппарата чаесборочной машины | 1986 |
|
SU1545992A1 |
| СИСТЕМА ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ | 1994 |
|
RU2103744C1 |
| ЧАЕУБОРОЧНАЯ МАШИНА | 1972 |
|
SU353674A1 |
| РАБОЧИЙ ОРГАН ЧАЕСБОРОЧНОГО АППАРАТА | 1991 |
|
RU2017378C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ НАГРЕВАТЕЛЯМИ АППАРАТУРЫ КОСМИЧЕСКОГО АППАРАТА | 2014 |
|
RU2571728C1 |
| Система управления автоматической трансмиссией транспортного средства | 1989 |
|
SU1731661A1 |
| Устройство управления гидроприводом затвора шлюза | 1986 |
|
SU1406295A1 |
| Устройство управления гидроприводом затвора шлюза | 1990 |
|
SU1745815A1 |
| МНОГОПРОЦЕССОРНАЯ КОРАБЕЛЬНАЯ УПРАВЛЯЮЩАЯ ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА | 2000 |
|
RU2174704C1 |
Изобретение относится к сельскохозяйственному машиностроению, в частности к устройствам для автоматического слежения за движением чаесборочных аппаратов относительно поверхности чайных шпалер. Цель изобретения - повышение точности слежения, быстродействия, уровня автоматизации управления чаесборочным аппаратом, качества чайного сырья. При подъеме или опускании чаесборочного аппарата микропроцессорное устройство 12 анализирует информацию от датчиков положения. После установки аппарата в положение, заданное микропроцессорным устройством 12, на электрогидропреобразователи 6 силовых цилиндров 3 по программе, выполняемой микропроцессорным устройством 12, через блок адаптеров выходов поступают сигналы нулевого уровня и чаесборочный аппарат фиксируется в заданном положении. При въезде на шпалеру кнопкой запускается программа, заложенная в устройство, которая управляет опусканием чаесборочного аппарата до оптимальной нижней точки, определяемой по показаниям фотоэлектронных датчиков 11 положения вершин чайных флешей. 7 ил.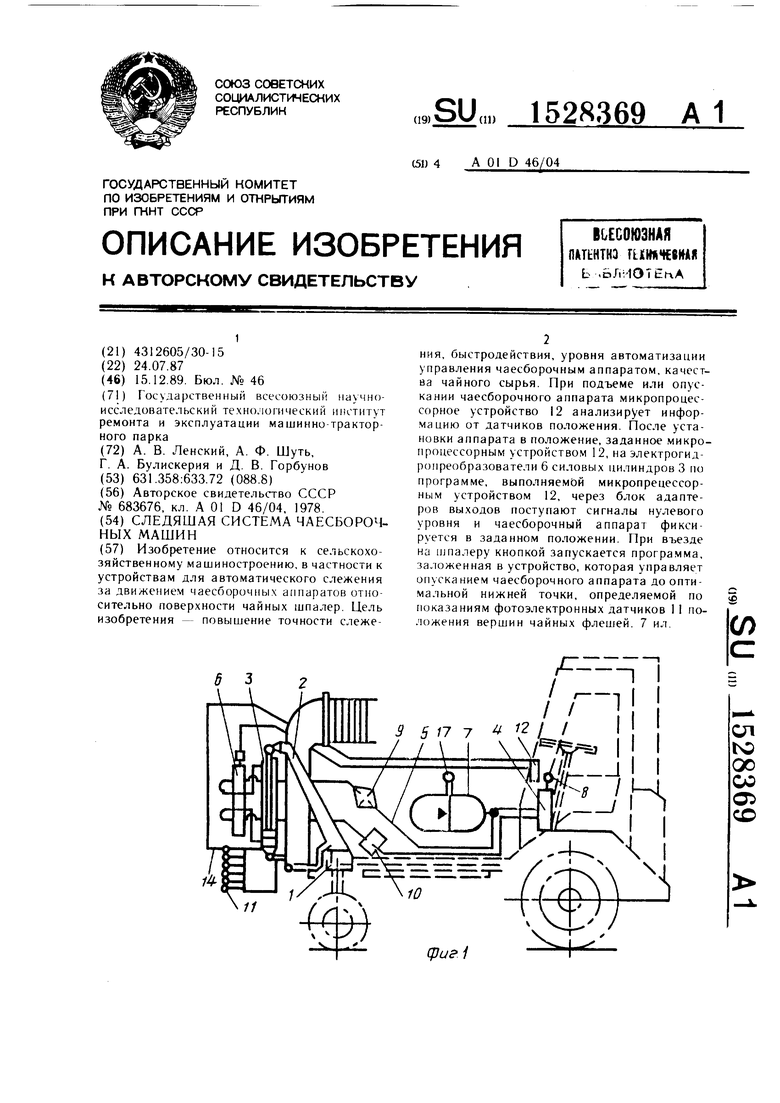
ды, кран у правления, гилроцилиндры, гидро dKK м.1нто|1, 1рел1).р:1иительный кла пан, л;|т чнки положения (и/)тличающаяся тем, что с целью повышения точности слеже11ия уменьшения повреждаемости флешей, повы- и1ения быстродействия, уровня автоматизации управления чаесборочной машины и качества чайного сырья, следящая система снабжена микропроцессором, оперативным и постоянным запоминающими устройствами, блоком программирования, дисплеем, блоками периферийных адаптеров и адаптеров входов и выходов, бесконтактными фото- :1лектронными датчиками, содержащими СЕИ - тодиоды и (})отоприемники, расположенные на боковых поверхностях горизонтальных штырей перед режущей дугой, датчиками возвратно-поступательного перемещения гидроцилиндров, дагчиком давления рабочей жидкости, 31лектро1 идравлическими преобразователями двустороннего действия, первый и второй гидравлические входы которых
0
5
0
трубопроводами через масляный фильтр и гидравлические дроссели присоединены соответственно к напорному и сливному т)убо- проводам пасосно-аккумуляторной станции., к общей 1иине микропроцессора подк.чючены блоки ()пе)ативного запоминающего устройства, постоянного запоминающего устройства, блок адаптеров входов, к .первому и второму входам которого подключены выходы датчика дав.ления рабочей жидкости и бесконтактных фотоэлектронных датчиков, блок периферийных адаптеров, при STOM к первому и второму входам послед него подключены соотвегственно выходы датчиков воз врат по-посту па тельного перемещения гидроцилиндров и первый выход уст- ройсгва программирования, иторым выходом подключенные к входу дисплея, блок адаптеров выходов, первым и вторым выходами подключенный к электрическим входам первого и второго гидравлических электро- преобразовате,1ей.
Фи.з
20
19
/
/vc 4
К (SnoKy IS
От $л9ко 26
Фиг. 5
(Cfpsc
ntjCK
Инициализоа ии
/ Sgod /
riem
/ ввод /
/ Вывод в порть/ 2,J / Т
г Фм/fwXi sti;
/ Bbigod 8 порт /
,I
С Конец J
Фиг. 6
| Следящая система | 1978 |
|
SU683676A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
