Изобретение относится к автомобилестроению и может быть использовано на транспортных средствах, имеющих многоступенчатые коробки передач.
Известны устройства для управления автоматическими трансмиссиями, содержащие блок управления переключением коробки передач при разгоне транспортного средства, причем управление переключением осуществляется электрогидравлическим способом, а диапазон переключения обеспечивается пружинными упорами, переводящими рычаг управления до установленного оператором порога в диапазоне передач.
Недостатками таких устройств являются сам принцип управления, основанный на линейной зависимости между скоростью и
номером включенной передачи, причем автоматическое переключение ограничено только одной передачей, а также методика управления.
Наиболее близкой по технической сущности к предлагаемой является электронная система управления трансмиссией автомобиля, состоящая из двух индукционных дат- чиков скорости и частоты вращения двигателя транспортного средства, связанных через блок обработки сигналов с блоком управления, и постоянного запоминающего устройства, а блок управления связан с исполнительными элементами.
Известное устройство не обеспечивает автоматического переключения передач в заданном диапазоне скоростей, сложно в
VI со
ON
управлении и не имеет обратной связи, т.е. не анализируются дорожные условия. Причем оно осуществляет коррекцию движения по эмпирическим зависимостям на этапе разгона автомобиля с использованием цент- робежного регулятора. Топливная экономичность и приемистость, а также надежность устройства низкие.
Цель изобретения - повышение эффективности путем улучшения технико-эксплуа- тационных характеристик и достижения автоматического процесса переключения передач в заданном диапазоне с учетом обратной связи от дорожных условий.
Поставленная цель достигается тем, что система управления автоматической трансмиссией, имеющая устройство обработки скорости и устройство обработки числа оборотов двигателя транспортного средства, снабжена блоком управления, контролле- ром, адаптером, таймером, оперативным запоминающим устройством, при этом блок управления через вход запроса и вход подтверждения прерывания соединен с контроллером, при этом один из портов адаптера подключен к устройству управления подачей топлива, включающему последовательно соединенные цифроаналоговый преобразователь, усилитель постоянного тока, двигатель постоянного тока, редуктор с контактным устройством обратной связи, разъединительную электромагнитную муфту с усилительным каскадом, а другой порт адаптера подключен к устройству управления переключением передач, включающему последовательно соединенные цифроаналоговый преобразователь, усилитель постоянного тока, двигатель постоянного тока, командоаппарат, защитный электромагнитный выключатель с усилительным каскадом и сборку электромагнитов с усилительными каскадами, третий порт адаптера соединен с выходами датчика включенной передачи, электромагнитным защитным выключателем с усилительным каскадом и разъедини- тельной электромагнитной муфтой с усилительным каскадом, а также с контактным устройством редуктора с обратной связью устройства управления подачей топлива, а выход таймера соединен с линиями обработки скорости и линиями обработки числа оборотов двигателя транспортного средства, каждая из которых содержит двоичный счетчик, вход которого соединен с выходом элемента задержки, а выход счет- чика соединен с входом регистра, выход регистра соединен с шиной данных блока управления, выход элемента задержки соединен с входом контроллера, вход элемента задержки соединен с динамическим
синхровходом регистра, вход элемента задержки подключен к выходу формирователя импульсов, вход которого соединен с выходом индукционного датчика. Постоянное запоминающее устройство содержит модуль управления, модули зависимости крутящего момента от числа оборотов двигателя и от скорости транспортного средства и константы коррекции.
Разгон от минимальной скорости до максимальной или иной скорости из диапазона скоростей обеспечивается включением вышеперечисленных устройств и узлов определенным образом, применяемым при управлении графиком и эффективной методикой управления, отсутствием неудачного метода переключения передач исходя только из скорости и нагрузки транспортного средства. Кроме того, система обеспечивает обратную связь за счет непрерывного анализа как числа оборотов двигателя, так и скорости транспортного средства и сравнивание с занесенными в постояное запоминающее устройство графиками, т,е. анализ дорожных условий при переключении передач, эффективно выполняющийся также и за счет устойчивой к колебаниям конструкции исполнительных механизмов.
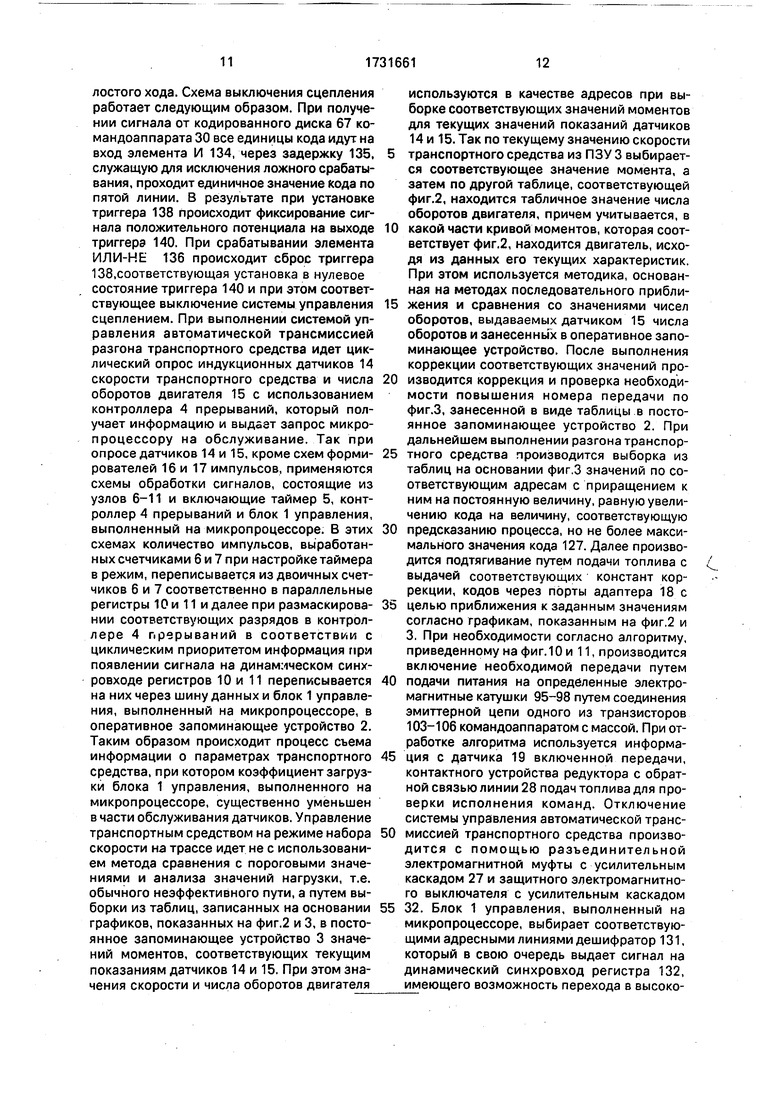
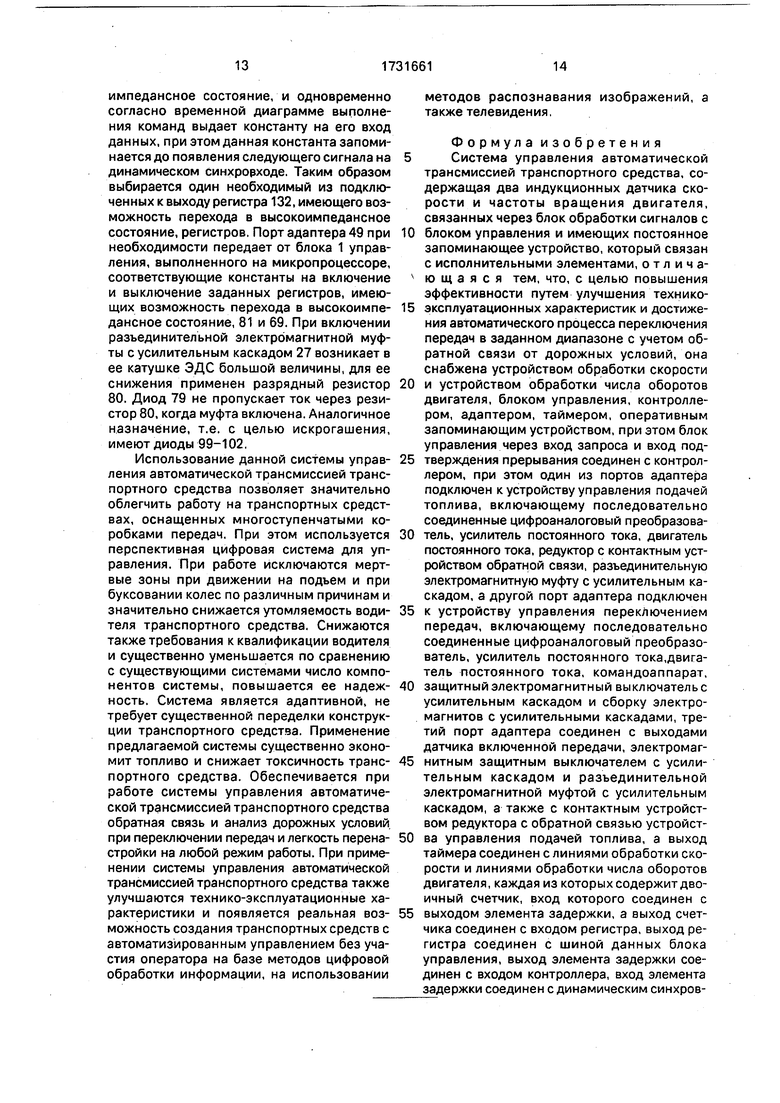
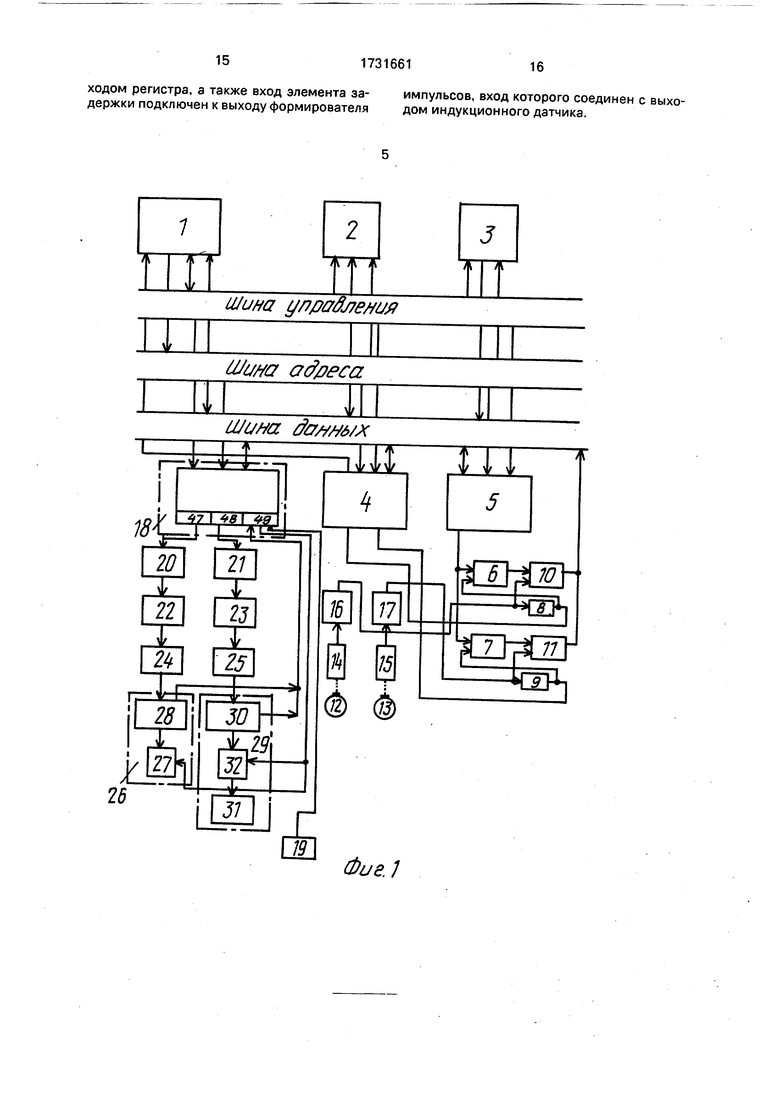
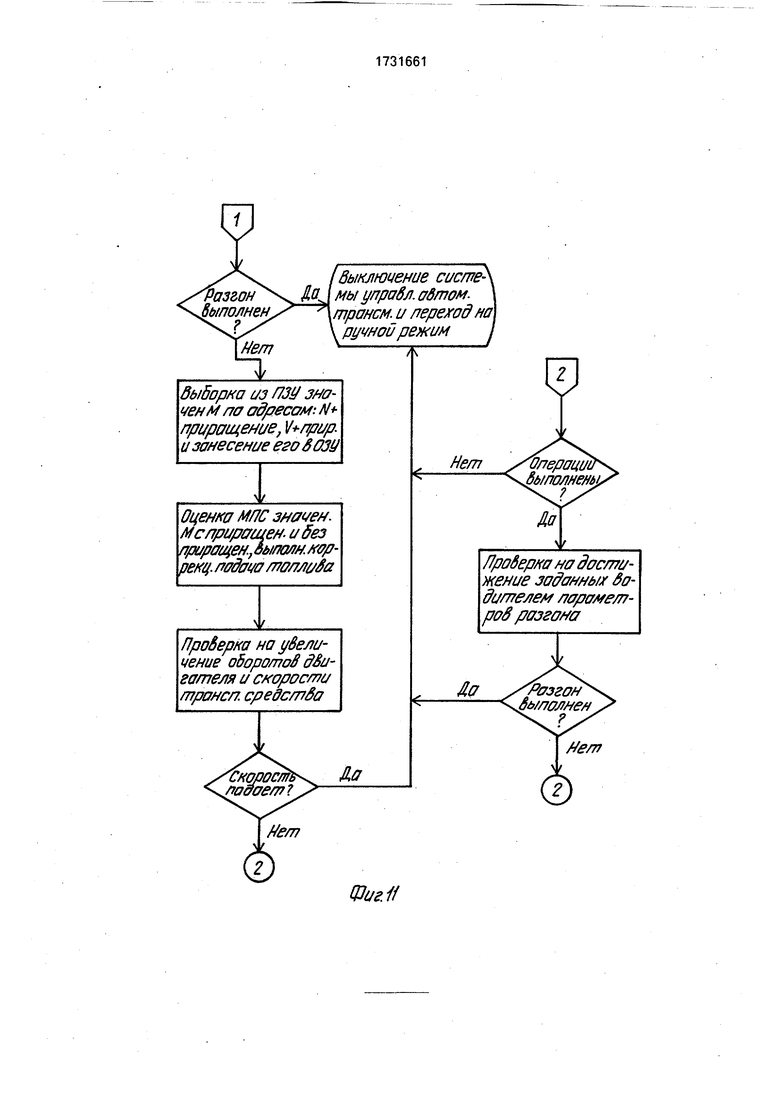
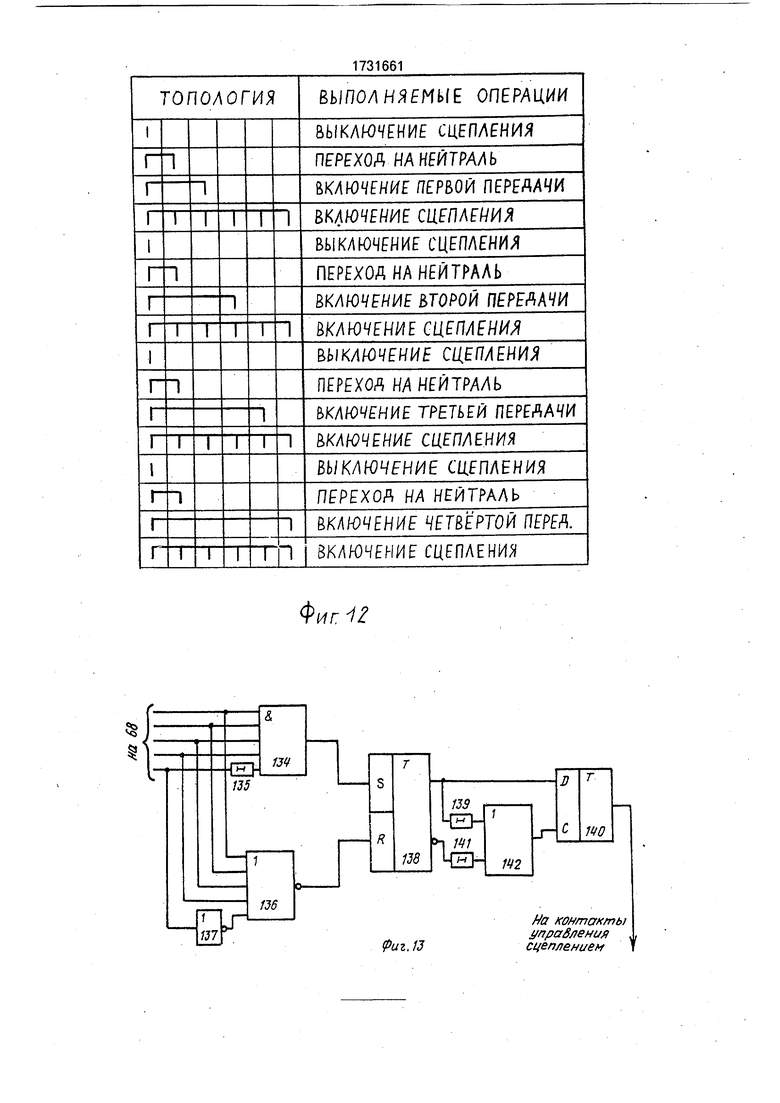
На фиг.1 изображена структурная схема системы управления автоматической трансмиссией транспортного средства; на фиг.2 - график зависимости крутящего момента от числа оборотов входного вала двигателя; на фиг.З - график зависимости крутящего момента от скорости движения транспортного средства; на фиг.4 - функциональная схема системы управления автоматической трансмиссией транспортного средства; на фиг.5 - структурная схема контроллера прерываний; на фиг.6 - структурная схема таймера; на фиг.7 - конструкция устройства управления подачей топлива, т.е. линии подач топлива; на фиг.З - конструкция устройства управления переключением передач, т.е. линии переключения передач; на фиг.9 - функциональная схема включения узлов системы управления автоматической трансмиссией транспортного средства; на фиг.10 и 11 - алгоритм работы системы управления автоматической трансмиссией транспортного средства; на фиг.12 - таблица состояний кодированного диска командоаппарата; на фиг.13 - функциональная схема включения сцепления.
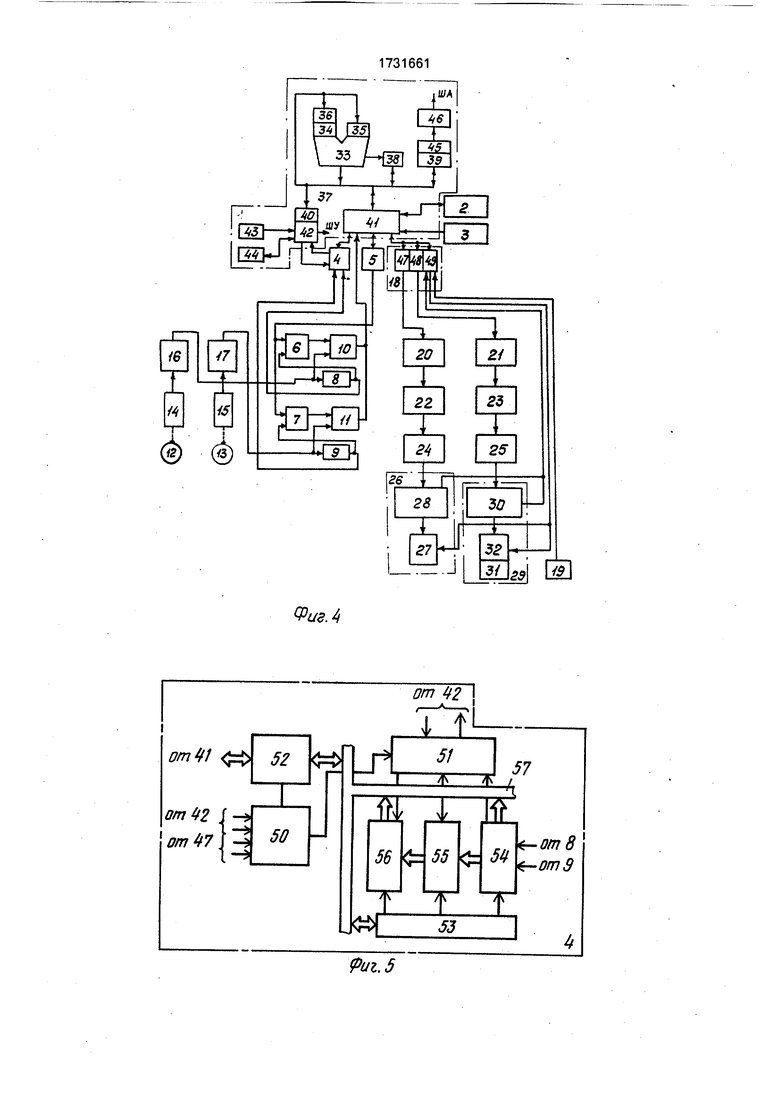
Система управления автоматической трансмиссией состоит из блока управления, выполненного на микропроцессоре 1, соединенного с шиной управления (ШУ), шиной адреса (ША) и шиной данных (ШД). С вышеуказанными шинами соединено оперативное запоминающее устройство 2, причем с ШУ и ША - только на ввод, а с ШД как на ввод, так и на вывод информации. Постоянное запоминающее устройство 3 соединено с ШУ и ША на ввод, а с ШД - на вывод информации. Контроллер 4 прерываний подключен к ШАи ШУ на ввод, акШД-как на ввод, так и на вывод. Отдельной шиной запросов прерываний контроллер 4 соединен с микропроцессором 1. Таймер 5 подключен к ШУ и ША на ввод, а к ШД - как на ввод, так к на вывод. Выход таймера 5 подключен на две одинаковые параллельные линии, состоящие из счетчиков 6 и 7, элементов 8 и 9 задержки, регистров 10 и 11, причем выходы регистров 10 и 11 подсоединены к ШД. Зубцовые диски 12 и 13 соединены с индукционными датчиками скорости 14 и числа оборотов 15. К датчикам 14 и 15 подсоединены формирователи 16 и 17 импульсов, которые в свою очередь соединены с входами схем 8 и 9 задержки. Адаптер 18 параллельного интерфейса подключен к ШУ и ША на ввод, а к ШД - на ввод и на вывод. К адаптеру 18 через отдельную шину подсоединены датчик 19 включенной передачи,а также линии подач топлива и переключения передач, состоящие из последовательно включенных знакопеременных цифроаналоговых преобразователей 20 и 21, усилителей 22 и 23 постоянного тока, двигателей 24 и 25 постоянного тока, исполнительного механизма 26, состоящего из разъединительной электромагнитной муфты 27 с усилительным каскадом и редуктора 28 с контактным устройством обратной связи, соединенного через электромагнитную муфту с усилительным каскадом 27 с подачей топлива, и исполнительного механизма 29, состоящего из командоаппарата 30, и сборки электромагнитов переключения передач с усилительным каскадом 31, питание на который идет от командоаппарата 30 через защитный электромагнитный выключатель с усилительным каскадом 32. Блок 1 управления состоит из АЛУ 33, один из входов которого соединен с первым буферным регистром 34, а другой - с вторым буферным регистром 35, первый буферный регистр 34 соединен с аккумулятором 36, а выход АЛУ 33 соединен с внутренней ШД 37 и входом регистра 38 флажков, вход аккумулятора 36 и вход второго буферного регистра 35 соединены с внутренней ШД 37, к которой подсоединены блок 39 регистров общего назначения и выход регистра 38 флажков через двунаправленные линии внутренней ШД 37, а регистр 40 команд соединен с внутренней ШД и преобразователем 41 интерфейса данных блока управления, своим
выходом регистр 40 команд соединен с устройством 42 управления, к выходу устройства 42 управления подключен генератор 43 тактовых импульсов и пульт 44 управления,
выход блока 39 регистров общего назначения соединен с коммутатором 45, к выходу которого подключен преобразователь 46 интерфейса адреса блока управления, выход преобразователя 41 интерфейса данных бло0 ка управления соединен с входами адаптера 18, состоящего из трех портов: обслуживающего линию подач топлива порта 47, обслуживающего линию переключения передач порта 48 и обслуживающего датчик 19 вклю5 ченной передачи, защитный электромагнитный выключатель с усилительным каскадом 32, разъединительную электромагнитную муфту 27 с усилительным каскадом, контактное устройство редуктора 28 с обратной
0 связью линии подач топлива, командоаппа- рат 30 порта 49.
Контроллер 4 прерываний состоит из схемы 50 управления контроллером прерываний, логики 51 управления, буфера 52 ши5 ны данных контроллера прерываний, регистра 53 маскирования контроллера прерываний, регистра 54 запросов на прерывания, блока 55 разрешения приоритета, регистра 56 обслуживания, внутренней ма0 гистрали 57 данных контроллера прерываний.
Таймер 5 состоит из схемы 58 управления таймером, регистра 59 управляющего слова, буфера 60 шины данных таймера,
5 первого 61, второго 62 и третьего 63 счетчиков, внутренней магистрали 64 данных таймера.
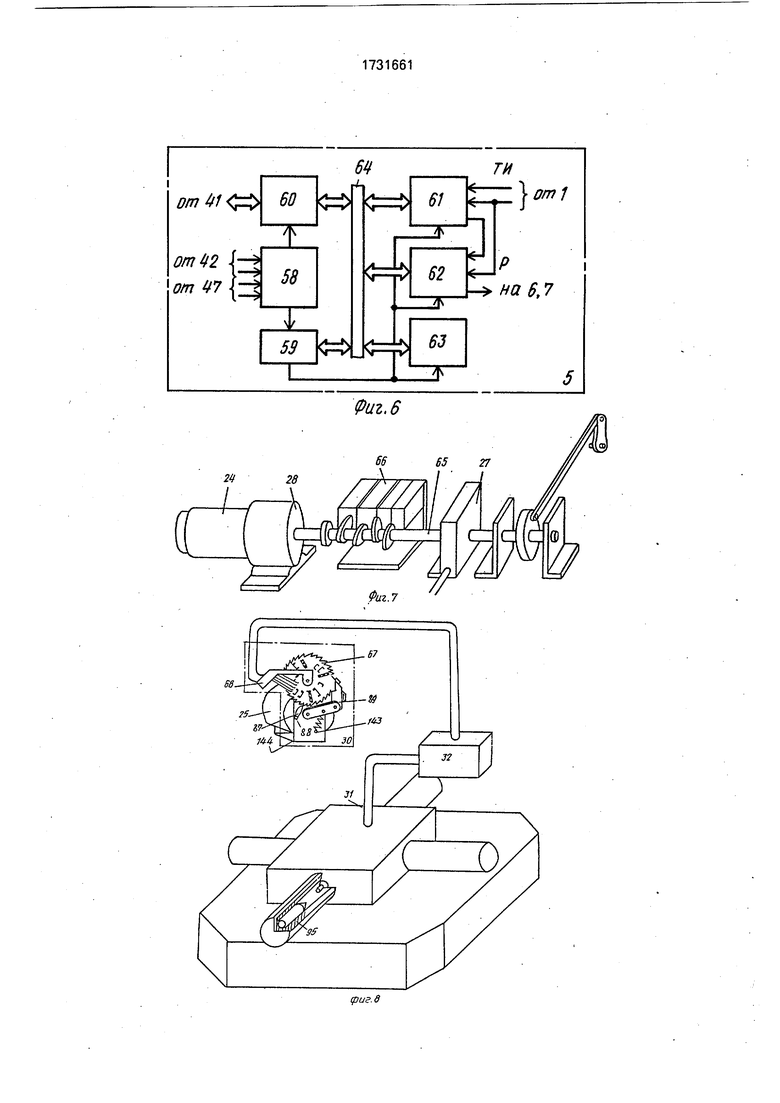
Контактное устройство редуктора с обратной связью линии подач топлива состоит
0 из кулачкового вала 65, блока 66 концевых выключателей контактного устройства редуктора 28 с обратной связью линии подач топлива. Командоаппарат 30 состоит из электродвигателя 25, кодированного диска
5 67, токосъемного устройства 68. Разъединительная электромагнитная муфта 27 с.усилительным каскадом имеет цепь управления, состоящую из регистра 69, имеющего возможность перехода в высокоимпедансное
0 состояние, к первому выходу которого через инвертор, выполненный на элементе И-НЕ
70,подсоединен первый вход элемента И-НЕ
71,восьмой выход регистра 69, имеющего возможность перехода в высокоимпедансное
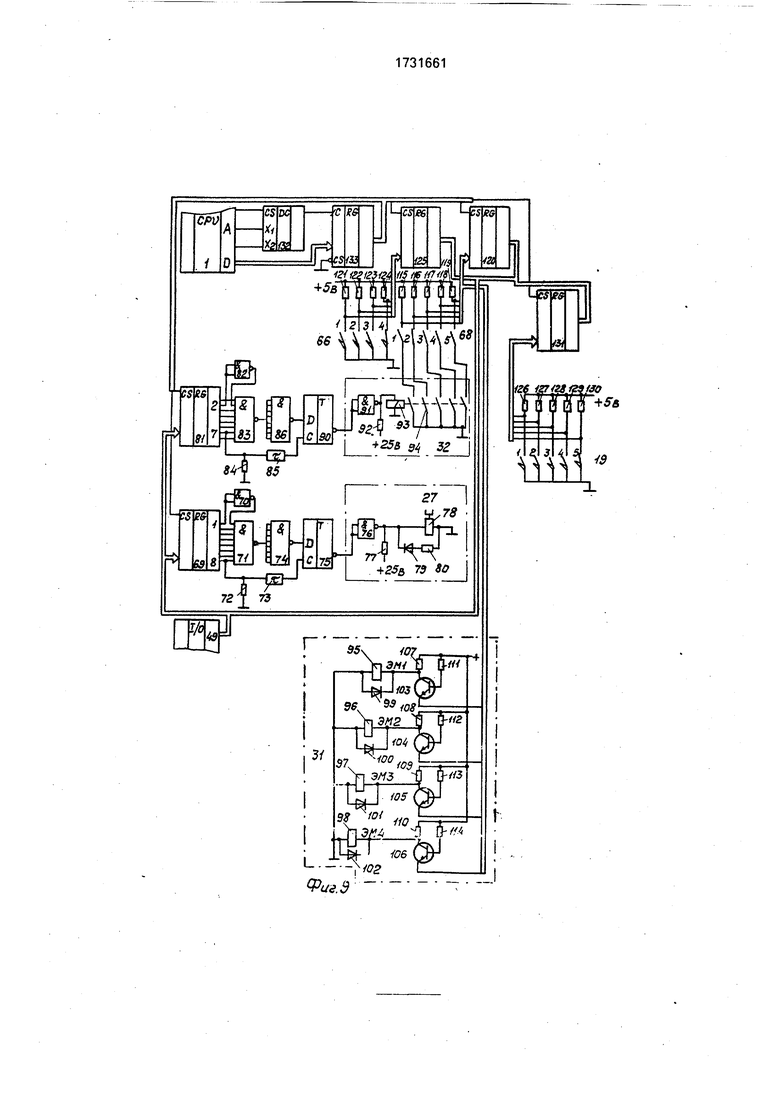
5 состояние, соединен с восьмым входом элемента И-НЕ 71, резистором 72 и входом элемента 73 задержки, второй-седьмой выходы регистра 69, имеющего возможность перехода в высокоимпедансное состояние, соединены с вторым-седьмым входами элемента И-НЕ 71, выход И-НЕ 71 соединен со всеми входами элемента И-НЕ 74, выход элемента И-НЕ 74 соединен с входом данных триггера 75, инверсный вход триггера 75 соединен с входом элемента И-НЕ 76, выход элемента И-НЕ 76 соединен с источником питания постоянного тока напряжением 25 В через резистор 77, а также с одним из входов катушки 78 разъединительной электромагнитной муфты 27, второй вход катушки 78 соединен с массой, выход элемента V3 задержки соединен с синхровхо- дом триггера 75. Между входом и выходом катушки 78 параллельно включена цепь, состоящая из последовательно включенных диода 79 и резистора 80. Защитный электромагнитный выключатель с усилительным каскадом 32 имеет цепь управления, состоящую из регистра 81, имеющего возможность перехода в высокоимпедансное состояние, к второму выходу которого через инвертор 82, выполненный на элементе И- НЕ, подсоединен второй вход элемента И- НЕ 83, седьмой выход регистра 81, имеющего возможность перехода в высоко- импедансное состояние, соединен с седьмым входом элемента И-НЕ 83, резистором 84 и входом элемента 85 задержки, первый- восьмой выходы регистра 81, имеющего возможность перехода в высокоимпеданс- ное состояние, соединены с первым-восьмым входами элемента И-НЕ 83, выход элемента И-НЕ 83 соединен со всеми входами элемента И-НЕ 86, выход элемента И-НЕ 86 соединен с входом данных триггера 90, инверсный выход триггера 90 соединен с входами элемента И-НЕ 91, выход элемента И-НЕ 91 соединен с источником питания постоянного тока напряжением 25 В через резистор 92, а также с одним из, ЗХОДОБ катушки 93 защитного электромагнитного выключателя 32, второй вход катушки 93 соединен с массой, выход элемента 85 задержки соединен с синхроьходом триггера 90. Катушка 93 через магнитное поле соеди- нена при включенном состоянии с сердечником, который в свою очередь механически соединен с группой контактов 94. Сборка электромагнитов с усилительными каскадами 31 состоит из электромагнитных катушек 95-98, вентилей 99-102, включенных параллельно электромагнитным катушкам 95-98. Выходы электромагнитных катушек 95-98 соединены с транзисторами 103-106 через коллекторные входы и с резисторами 107- 110, включенными в коллекторные цепи транзисторов 103-106, базовые цепи транзисторов 103-106 соединены через резисторы 111-114 с источником питания постоянного тока положительного потенциала, вторые
выводы резисторов 107-110 соединены с вторыми выводами резисторов 111-114 и с источником питания постоянного тока положительного потенциала, эмиттерные выводы транзисторов 103-106 соединены с токосъемным устройством через контактные площадки токосъемного устройства 68, через пятиразрядную шину и через резисторы 115-119, с источником постоянного тока напряжением 5 В, а также с входом данных регистра 120, имеющего возможность перехода в высокоимпедансное состояние. В зависимости от положения кодированного диска 67 в статическом состоянии определенные контакты токосъемного устройства 68 соединены через защитный электромагнитный выключатель с усилительным каскадом 32 с массой (в статике на фиг.9 это контакт 2 токосъемного устройства 68). Блок 66 концевых выключателей соединен через контакты 1-4 с одним из входов резисторов 121-124, а также с входом данных регистра 125, имеющего возможность перехода в высокоимпедансное состояние. В зависимости от положения кулачкового вала 65 в статическом состоянии определенные контакты концевых выключателей соединены с массой (в статике на фиг.9 это контакт 4 концевого выключателя блока концевых выключателей 66).
Датчик 19 включенной передачи, выполненный на концевых выключателях, соединен через контакты 1-5 соответственно с входами 126-130 резисторов, а также с входом данных регистра 131, имеющего возможность перехода в высокоимпедансное состояние. В зависимости от положения исполнительного органа коробки переключения передач датчик 19 включенной передачи в статическом состоянии через определенные концевые выключатели, соединенные с массой, содержит сигнал о номере включенной передачи (в статике на фиг.9 это контакт 5 концевого выключателя датчика 19 включенной передачи). К источнику питания постоянного тока напряжением 5 В подключены входы резисторов 126-130 и также соответственно входы резисторов 121-124. Микропроцессор 1 через преобразователь 46 интерфейса адреса блока управления, который функционально находится в микропроцессоре 1, являющемся блоком 1 управления и определенными линиями ША, соединен с дешифратором 132 соответственно с его входными линиями и определенными линиями данных, а именно линиями 13-15 адреса и линиями 6-8 данных с соответствующими входами регистра 133, имеющего возможность перехода в высокоимпедансное состояние. Вход выборки кристалла регистpa 133, имеющего возможность перехода в высокоимпедансное состояние, постоянно выбран путем соответствующего соединения с массой. Выход дешифратора 132 соединен с синхровходом регистра 133, имеющего возможность перехода в высокоимпедансное состояние. Выход регистра 133, имеющего возможность перехода в высокоимпедансное состояние, соединен первой линией ШД с входом выборки кристалла регистра 125, имеющего возможность перехода в высокоимпедансное состояние, второй линией ШД - с входом выборки кристалла регистра 120, имеющего возможность перехода в высокоимпедансное состояние, третьей линией ШД - с входом выборки кристалла регистра 131, имеющего возможность перехода в высокоимпедансное состояние, четвертой и пятой линиями ШД - с входами выборки кристаллов регистров 81 и 69, имеющих возможность перехода в высокоимпедансное состояние. Порт 49 адаптера 18 соединен через двунаправленные линии восьмиразрядной шины с входами регистров, имеющих возможность перехода в высокоимпедансное состояние 81 и 69,соединен с выходами регистров 125,120 и 131, имеющих возможность перехода в высокоимпедансное состояние. При подключении блока концевых выключателей 66 четыре старших разряда порта 49 маскируются, при подключении датчика 19 включенной передачи, выполненного на концевых выключателях, и токосъемного устройства 68 три старшие разряда порта 48 адаптера 18 маскируются. Схема управления сцеплением подключена между одними из входов резистороз 5- 119 и контактами токосъемного устг зйстз« 68. Она состоит из включенные перилле, элементов ИЛИ-НЕ, И, причем пгтьы вход элемента И 134 включен через злзмсгнт 135 задержки, а пятый вход элемента ИЛИ-НЕ 136 включен через элемечт УШИ-НЕ 137, выход элемента И 134 соединен с входом установки триггера 128, выход элемента ИЛИ-НЕ 136 соединен с входом сброса триггера 138, прямой выход триггера 138 соединен с входом элемента 139 задержки и входом данных регистра 140, инверсный выход триггера 138 соединен с входом элемента 141 задержки, выход элемента 139 задержки и выход элемента 141 задержки соединены с входами элемента ИЛИ 142, выход элемента ИЛИ 142 соединен с синхровходом триггера 140, выход триггера 140 подсоединен к контактам выключателя сцепления системы управления сцеплением автомобиля Фиат- Панда, расположенным на рукоятке рычага переключения передач, причем подключение осуществлено параллельно. В случае
транспортного средства на гусеничном ходу выход триггера 140 прямо соединен с соответствующим электромагнитом гидросистемы. Командоаппарат 30 состоит также из
возвратной пружины 143, изображенной на фиг.8, несущей стойки с ограничителем хода составного рычага 144, собачки 187, пружины собачки 188, составного рычага 189. В изобретении применяются микропро0 цессор КР580ВМ80А со схемами обрамления, адаптер ВВ 55, таймер ВИ 53, контроллер ВН59, ЦАП, УПТ, двоичные счетчики, регистры, элементы задержки из последовательно соединенных микросхем
5 на 40 не и более, элементы памяти, формирователи импульсов, индукционные датчики, зубцовые диски, двигатель постоянного тока со встроенным редуктором, разъединительная электромагнитная муфта, рассчитан0 ная на включение в цепь постоянного тока напряжением 24 В, командоаппарат, электромагнитный выключатель, серийные электромагниты переключения передач от ГМП ЛИАЗ-677, система управления сцеплением
5 автомобиля Фиат-Панда 30.
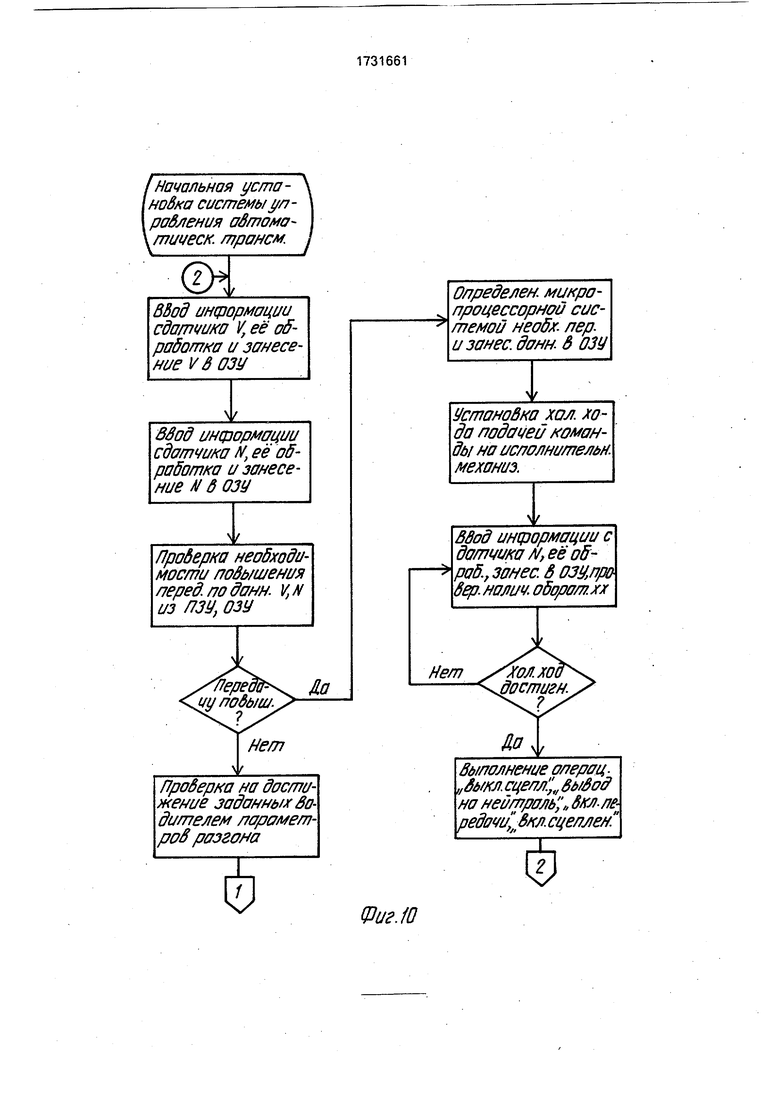
Для доказательства возможности получения положительного эффекта при взаимодействии узлов системы управления автоматической трансмиссией транспорт0 ного средства приведен алгоритм работы на фиг.10 и 11. Согласно топологии, приведенной в таблице на фиг.12, после выполнения операции выключения сцепления с помощью известной системы Фиат-Панда 30
5 производится проверка отработки выключения сцепления по показаниям датчика числа оборотов и датчика скорости транспортного средства. Если сцепление включилось, то производится выполнение операции выво0 да на нейтраль в коробке переключения передач системы. При успешном выполнении далее выполняется операция включения заданной передачи исходя из показаний датчиков скорости транспортного средства и
5 числа оборотов двигателя транспортного средства. После этого производится проверка исполнения включения передачи по показаниям датчика включенной передачи. Далее производится выполнение операции
0 включения сцепления и проверка отработки по показаниям датчиков скорости транспортного средства и числа оборотов двигателя транспортного средства. В случае любой неотработки выполняется выключение сйсте5 мы управления автоматической трансмиссией транспортного средства и переход на ручной режим. Перед выполнением операции выключения сцепления производится соответственно уменьшение оборотов двигателя до уровня оборотов холостого хода. Схема выключения сцепления работает следующим образом. При получении сигнала от кодированного диска 67 ко- мандоаппарата 30 все единицы кода идут на вход элемента И 134, через задержку 135, служащую для исключения ложного срабатывания, проходит единичное значение кода по пятой линии. В результате при установке триггера 138 происходит фиксирование сигнала положительного потенциала на выходе триггера 140. При срабатывании элемента ИЛИ-НЕ 136 происходит сброс триггера 138,соответствующая установка в нулевое состояние триггера 140 и при этом соответствующее выключение системы управления сцеплением. При выполнении системой управления автоматической трансмиссией разгона транспортного средства идет циклический опрос индукционных датчиков 14 скорости транспортного средства и числа оборотов двигателя 15 с использованием контроллера 4 прерываний, который получает информацию и выдает запрос микропроцессору на обслуживание. Так при опросе датчиков 14 и 15, кроме схем формирователей 16 и 17 импульсов, применяются схемы обработки сигналов, состоящие из узлов 6-11 и включающие таймер 5, контроллер 4 прерываний и блок 1 управления, выполненный на микропроцессоре. В этих схемах количество импульсов, выработанных счетчиками 6 и 7 при настройке таймера в режим, переписывается из двоичных счетчиков 6 и 7 соответственно в параллельные регистры 10 и 11 и далее при размаскирова- нии соответствующих разрядов в контроллере 4 прерываний в соответствии с циклическим приоритетом информация при появлении сигнала на динамическом синх- ровходе регистров 10 и 11 переписывается на них через шину данных и блок 1 управления, выполненный на микропроцессоре, в оперативное запоминающее устройство 2. Таким образом происходит процесс съема информации о параметрах транспортного средства, при котором коэффициент загрузки блока 1 управления, выполненного на микропроцессоре, существенно уменьшен в части обслуживания датчиков. Управление транспортным средством на режиме набора скорости на трассе идет не с использованием метода сравнения с пороговыми значениями и анализа значений нагрузки, т.е. обычного неэффективного пути, а путем выборки из таблиц, записанных на основании графиков, показанных на фиг.2 и 3, в постоянное запоминающее устройство 3 значений моментов, соответствующих текущим показаниям датчиков 14 и 15. При этом значения скорости и числа оборотов двигателя
используются в качестве адресов при выборке соответствующих значений моментов для текущих значений показаний датчиков 14 и 15. Так по текущему значению скорости
транспортного средства из ПЗУ 3 выбирается соответствующее значение момента, а затем по другой таблице, соответствующей фиг.2, находится табличное значение числа оборотов двигателя, причем учитывается, в
0 какой части кривой моментов, которая соответствует фиг.2, находится двигатель, исходя из данных его текущих характеристик. При этом используется методика, основанная на методах последовательного прибли5 жения и сравнения со значениями чисел оборотов, выдаваемых датчиком 15 числа оборотов и занесенных в оперативное запоминающее устройство. После выполнения коррекции соответствующих значений про0 изводится коррекция и проверка необходимости повышения номера передачи по фиг.З, занесенной в виде таблицы в постоянное запоминающее устройство 2. При дальнейшем выполнении разгона транспор5 тного средства производится выборка из таблиц на основании фиг.З значений по соответствующим адресам с приращением к ним на постоянную величину, равную увеличению кода на величину, соответствующую
0 предсказанию процесса, но не более максимального значения кода 127. Далее производится подтягивание путем подачи топлива с выдачей соответствующих констант коррекции, кодов через порты адаптера 18 с
5 целью приближения к заданным значениям согласно графикам, показанным на фиг.2 и 3. При необходимости согласно алгоритму, приведенному на фиг. 10 и 11, производится включение необходимой передачи путем
0 подачи питания на определенные электромагнитные катушки 95-98 путем соединения эмиттерной цепи одного из транзисторов 103-106 командоаппаратом с массой. При отработке алгоритма используется информа5 ция с датчика 19 включенной передачи, контактного устройства редуктора с обратной связью линии 28 подач топлива для проверки исполнения команд. Отключение системы управления автоматической транс0 миссией транспортного средства производится с помощью разъединительной электромагнитной муфты с усилительным каскадом 27 и защитного электромагнитного выключателя с усилительным каскадом
5 32. Блок 1 управления, выполненный на микропроцессоре, выбирает соответствующими адресными линиями дешифратор 131, который в свою очередь выдает сигнал на динамический синхровход регистра 132, имеющего возможность перехода в высокоимпедансное состояние, и одновременно согласно временной диаграмме выполнения команд выдает константу на его вход данных, при этом данная константа запоминается до появления следующего сигнала на динамическом синхровходе. Таким образом выбирается один необходимый из подключенных к выходу регистра 132, имеющего возможность перехода в высокоимпедансное состояние, регистров. Порт адаптера 49 при необходимости передает от блока 1 управления, выполненного на микропроцессоре, соответствующие константы на включение и выключение заданных регистров, имеющих возможность перехода в высокоимпедансное состояние, 81 и 69. При включении разъединительной электромагнитной муфты с усилительным каскадом 27 возникает в ее катушке ЭДС большой величины, для ее снижения применен разрядный резистор 80. Диод 79 не пропускает ток через резистор 80, когда муфта включена. Аналогичное назначение, т.е. с целью искрогашения, имеют диоды 99-102,
Использование данной системы управления автоматической трансмиссией транспортного средства позволяет значительно облегчить работу на транспортных средствах, оснащенных многоступенчатыми коробками передач. При этом используется перспективная цифровая система для управления. При работе исключаются мертвые зоны при движении на подъем и при буксовании колес по различным причинам и значительно снижается утомляемость водителя транспортного средства. Снижаются также требования к квалификации водителя и существенно уменьшается по сравнению с существующими системами число компонентов системы, повышается ее надежность. Система является адаптивной, не требует существенной переделки конструкции транспортного средства. Применение предлагаемой системы существенно экономит топливо и снижает токсичность транспортного средства. Обеспечивается при работе системы управления автоматической трансмиссией транспортного средства обратная связь и анализ дорожных условий при переключении передач и легкость перенастройки на любой режим работы. При применении системы управления автоматической трансмиссией транспортного средства также улучшаются технико-эксплуатационные характеристики и появляется реальная возможность создания транспортных средств с автоматизированным управлением без участия оператора на базе методов цифровой обработки информации, на использовании
методов распознавания изображений, а также телевидения,
Формула изобретения
Система управления автоматической
трансмиссией транспортного средства, содержащая два индукционных датчика скорости и частоты вращения двигателя, связанных через блок обработки сигналов с
блоком управления и имеющих постоянное
запоминающее устройство, который связан
с исполнительными элементами, о т л и ч аю щ а я с я тем, что, с целью повышения
эффективности путем улучшения техникоэксплуатационных характеристик и достижения автоматического процесса переключения передач в заданном диапазоне с учетом обратной связи от дорожных условий, она снабжена устройством обработки скорости
и устройством обработки числа оборотов двигателя, блоком управления, контроллером, адаптером, таймером, оперативным запоминающим устройством, при этом блок управления через вход запроса и вход подтверждения прерывания соединен с контроллером, при этом один из портов адаптера подключен к устройству управления подачей топлива, включающему последовательно соединенные цифроаналоговый преобразователь, усилитель постоянного тока, двигатель постоянного тока, редуктор с контактным устройством обратной связи, разъединительную электромагнитную муфту с усилительным каскадом, а другой порт адаптера подключен
к устройству управления переключением передач, включающему последовательно соединенные цифроаналоговый преобразователь, усилитель постоянного тока,двига- тель постоянного тока, командоаппарат,
защитный электромагнитный выключатель с усилительным каскадом и сборку электромагнитов с усилительными каскадами, третий порт адаптера соединен с выходами датчика включенной передачи, электромагнитным защитным выключателем с усилительным каскадом и разъединительной электромагнитной муфтой с усилительным каскадом, а также с контактным устройством редуктора с обратной связью устройства управления подачей топлива, а выход таймера соединен с линиями обработки скорости и линиями обработки числа оборотов двигателя, каждая из которых содержит двоичный счетчик, вход которого соединен с
выходом элемента задержки, а выход счетчика соединен с входом регистра, выход регистра соединен с шиной данных блока управления, выход элемента задержки соединен с входом контроллера, вход элемента задержки соединен с динамическим синхровходом регистра, а также вход элемента за- импульсов, вход которого соединен с выхо- держки подключен к выходу формирователя дом индукционного датчика.

| название | год | авторы | номер документа |
|---|---|---|---|
| ДВУХОСНЫЙ ПОВОРОТНЫЙ СТЕНД | 2018 |
|
RU2684419C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПРЕДУПРЕЖДЕНИЯ ВНЕЗАПНОГО УСКОРЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2180619C1 |
| Система управления и передачи вращательного момента на винт(ы) в беспилотных летательных аппаратах (БПЛА), стартер-генератор, плата управления стартером-генератором и амортизатор для этой системы | 2020 |
|
RU2741136C1 |
| СИСТЕМА ПРИВОДА ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2533956C2 |
| СИСТЕМА УПРАВЛЕНИЯ И ДИАГНОСТИКИ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2104883C1 |
| СИСТЕМА УПРАВЛЕНИЯ И ДИАГНОСТИКИ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2099206C1 |
| ТРАНСМИССИЯ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2106265C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ СУДОВОЙ ЛЕБЕДКИ | 1994 |
|
RU2074501C1 |
| ДИЗЕЛЬНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1989 |
|
RU2037635C1 |
| СИСТЕМА И СПОСОБ ДЛЯ УПРАВЛЕНИЯ ТРАНСМИССИЕЙ ВО ВРЕМЯ ОСТАНОВОК И ЗАПУСКОВ ДВИГАТЕЛЯ ДЛЯ КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2679089C2 |
Изобретение относится к автомобилестроению и может быть использовано в механизмах, имеющих коробку переключения передач. Целью изобретения является повышение эффективности путем улучшения технико-эксплуатационных характеристик и достижение автоматического процесса переключения передач в заданном диапазоне, с учетом обратной связи от дорожных условий. Система состоит из блока управления, выполненного на микропроцессоре, устройств ввода и вывода информации, памяти, устройств обработки сигналов с датчиков, устройств обработки скорости и устройств обработки числа оборотов двигателя, причем последний включает в себя последовательно соединенные цифроаналоговые преобразователи, усилители постоянного тока и двигатели постоянного тока. Устройства обработки числа оборотов двигателя и обработки скорости связаны с исполнительными механизмами. 13 ил. (Л
Шина уяряале/шя
Шц#а адреса
Шина дяямых
19
Фие.1
Мкр
кг/м
i27
Фиг. 2
МкрЬШ I
кг/н . д
Фиг.З
п о5/мин
т
ь
Укм1час
Фиг. 4
Pui.5
от tfl
от if 2 от 47
Фаг.7
Фиг.9
+Л
I Начальная иста- но8ка системы управления автома- muvecK. тронем.
ВЗод информации сдатчика V, её обработка и занесе- ниеУвОЗУ
/
Ввод информации сдатчика #, её обработка и занесение Л 603У
W
Проверка необходимости повышения перед, по донн. V,N из ПЗУ, ОЗУ
Проверка на достижение заданнь/х водителем лорамет- роВ разгона
ъ
Определен, микропроцессорной системой необх. пер. и зон ее. данн. & ОЗУ
Установка хол лада под аt/ей команды на исполнителен, мехониэ.
Вдод информации с датчика А/, её о5- раб.г занес. 6 озу,про- вер. налич. оборотхх
Да
выполнение операц. „бмл. сцепл ,,, вывод но нейтраль „ бкл.ле- редочи Вкл. сцеплен
Риг./О
Выключение систе Jlaj мы улрабл. автом. трансм. и лереходна pywou режим у
Выборка аз ПЗУ зна- ченМла адресам: N+ приращение, У+лршр. и занесение его 6 ОЗУ
/
Оценка МПС зночен. Мслрирашен- и без лриращен.,оылмн.#0р- рекц. rtffdcwa /яаллуба
м
Проберка на увеличение одоротоВ ffSu- гателя и скорости трансл. средсл7ба
Д0
Фиг.И
/
Нет
Лроберка на достижение заданных Јо- дилгелем лараме/л- poS разгона
Фиг 12
| Патент ФРГ № 3337930, кл | |||
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
| СПОСОБ ПОЛУЧЕНИЯ КОНСЕРВИРОВАННОГО КОМПОТА ИЗ КИЗИЛА | 2010 |
|
RU2417689C1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
