Гидропривод затвора шлюза включает гидроцилиндр 1, устройство управления которым содержит регулируемый основной насос 2 с регулятором 3 мощности. На одном валу с основным насосом 2 установлен дополнительный насос А. Питание насосов 2 и 4 осуществляется от сливного бака 5. В напорной линии дополнительного насоса 4 установлен предохранительный клапан 6 и регулируемый дроссель 7, ограничивающий расход рабочей жидкости, поступающей в рабочую полость регулятора 3 мощности. Напорная магистраль основного насоса 2 через обратный клапан 8, фильтр 9 подключена к предохранительному клапану 10 и к одной из исполнительных полостей 11 электрогидравлического усилителя 12 (ЭГУ) с электромеханическим преобразователем 13. Кроме того, напорная магистраль через гидрораспределитель 14 с электромагнитным управлением, дополнительный фильтр
15тонкой очистки и редукционный клапан
16подключена к полости 17 управления электрогидравлического усилителя 12, а через обратный клапан 18 - к штоковой полости 19 гидроцилиндра 1 и к полости 20 питания электрогидравлического усилителя 12. Другая исполнительная полость 21 и сливная полость 22 электрогидравлического усилителя 12 обьединены и подключены к поршневой полости 23 гидроцилиндра 1 и гидролинией 24 - к сливному баку 5. Электромеханический преобразователь 13 электрогидравлического усилителя 12 соединен с выходом электронного усилителя 25, вход которого электрически подключен к выходу широтно-импульсного преобразователя 26. преобразующего широтно-импульсный сигнал в непрерывный. Вход широтно-импульсного преобразователя 26 подключен к выходу широтно-импупьсного модулятора 27, вход которого через интерфейсную линию с вязи (не обозначена) подключен к микропроцессорному контроллеру 28. Датчик пути затвора выполнен в виде двух бесконтактных сельсинов 29 и 30, валы которых кинематически соединены с валами цилиндрического редуктора 31, который посредством тросовой передачи 32 связан со штоком 33 гидроцилиндрз 1, который шэр- нирно соединен с затвором 34. Трехфазные выходные обмотки сельсинов 29 и 30 подключены к общепромышленной сети через понижающий трансформатор (не показан), а однофазная выходная обмотка каждого сельсина 29 и 30 подключена к входам фа- зоимпульсного преобразователя 35. Выход фазоимпульсного преобразователя 35 электрически подключен к входу измерительного узла 36, выход которого через
интерфейсную линию связи подключен к микропроцессорному контроллеру 28. К последнему через интерфейсную линию связи также подключен вход согласующего узла
37, выходы которого подключены к тири- сторному пускателю 38 электродвигателя основного насоса 2 и к электромагниту гидрораспределителя 14. К микропроцессорному контроллеру 28 через интерфейсную
линию связи также подключены выход буферного регистра 39, вход которого подключен к пульту- 40 управления, и узел 41 контроля, выход которого подключен к электронным ключам широтно-импульсного модулятора 27, и узлов согласующего 37 и измерительного 38.
Микропроцессорный контроллер 28, широтно-импульсный модулятор 27, согласующий 37 и измерительный 36узлы, буферный регистр 39, пульт 40 управления и узел 41 контроля объединены в блок 42 программного управления.
Электрогидравлический усилитель 12 выпускается промышленностью в компакте
с электронным усилителем 25. Широтно-импульсный преобразователь 26 выполнен по известной схеме на стандартных интегральных и полупроводниковых элементах и содержит ограничитель амплитуды и фильтр.
Он осуществляет преобразование широтно- импульсного сигнала в аналоговый сигнал управления.
Фазоимпульсный преобразователь 35 выполнен по известной схеме на стандартных интегральных и полупроводниковых элементах и содержит компараторы и ключевые усилители мощности, количество которых равно количеству сигналов от сельсинов, и осуществляет преобразование
гармонических сигналов в фазоимпульсные сигналы.
Датчик пути выполнен на двух стандартных бесконтактных сельсинах (например, БД-501А), причем один сельсин 29 подключен к цилиндрическому редукторуЗ так, что дает один оборот за полный ход затвора, а другой - сельсин 30 - шестнадцать оборотов. Сельсин 29 определяет координату штока гидроцилиндра 1 в первом приближекии, а сельсин 30 уточняет эту координату с точностью 0,16 хода затвора.
Регулируемый основной насос 2 с регулятором 3 мощности, дополнительный насос 4. предохранительный клапан 6 с
дросселем 7, серийно выпускаются отечественной промышленностью.
Пульт 40 управления содержит ключ питания микропроцессорного контроллера 28 и ключи выбора программ, по которым осу
ществляются технологические операции маневрирования затвором.
Микропроцессорный контроллер 28 представляет собой стандартное устройство, выполненное, например, на микросхе- мах серии КР580 и серийно выпускаемое отечественной промышленностью.
Буферный регистр 39 выполнен на стандартных интегральных и полупроводниковых элементах и содержит запоминающие триггеры, которые фиксируют поступивший сигнал.
Измерительный узел 36 выполнен по известной схеме на стандартной интеграль- ной микросхеме (например, типа КР580ВИ53) и осуществляет преобразование фазоимпульсного сигнала, определяющего положение затвора, в цифровой сигнал.
Широтно-импульсный модулятор 27 вы- полней по известной схеме на стандартной интегральном микросхеме, например типа КР580ВИ53, и содержит преобразователь цифрового кода, в котором код, поступающий от микропроцессора 28, преобразуется в широтно-импульсный сигнал, пропорциональный скорости движения затвора, и ключевые усилители мощности, которые усиливают этот сигнал для подачи на вход- электронного усилителя 25.
Согласующий узел 37 релейных сигналов представляет собой набор оптронных тиристоров (например, Т02-10). количество которых равно количеству объектов управления.
Узел 41 контроля выполнен по известной схеме на стандартных интегральных микросхемах (например, типа К155ЛН1, К155ЛА8) и содержит дешифратор, который дешифрует цифровой сигнал самоконтроля, поступающий от микропроцессорного контроллера 28, и схемы логического умножения, которая по дешифрированному сигналу формирует сигнал Готовность контроллера, или импульсы повторного залу- ска контроллера.
Устройство управления гидроприводом затвора работает следующим образом.
При необходимости подъема затвора в положение Открыто на пульте 40 управле- ния включается ключ Питание контроллера, при этом микропроцессорный контроллер 28 подается питание и он начинает выполнять программу ожидания, которая включает подпрограмму самоконтроля и операции запроса состояния буферного регистра 39. В контроллере 28 формируются цифровые сигналы в соответствии с программой самоконтроля, записанной в микросхемах постоянных запоминающих
устройств (ПЗУ) контроллера. С выхода контроллера 28 сигналы самоконтроля по интерфейсной линии связи поступают на узел 41 контроля, где они дешифрируются и преобразуются в сигнал Готовность контроллера, который свидетельствует о готовности контроллера 23 к работе по заданной программе. Далее на пульте управления 40 включается один из ключей Открыть в зависимости от выбранного графика движения затвора, оптимального для данных условий шлюзования, в результате чего подается сигнал на буферный регистр 39, который запоминает поданный сигнал и позволяет повторно запрашивать его в процессе работы или при случайном сбое в работе контроллера 28. По окончании работы буферный регистр 39 обнуляется сигналом от контроллера. Из буферного регистра 39 сигнал команды поступает на контроллер, который переходит к выполнению выбранной программы Открыть, записанной в его ПЗУ. В контроллере 28 формируются цифровые сигналы в соответствии с выбранной программой Открыть, которые с выхода контроллера 28 по интерфейсной линии связи поступают на вход согласующего узла 37, где преобразуются в релейные сигналы управления, которые через электронный ключи, имеющиеся на выходе этого узла, поступают на электромагнит гидрораспределителя 14 и на тиристорный пускатель 38 электродвигателя основного насоса 2. При этом включается гидрораспределитель 14, который сообщает напорную магистраль с полостью 17 управления электрогидравлического усилителя 12 через фильтр 15 и редукционный клапан 16. и включается тиристорный пускатель 38, который подключает к силовой сети электродвигатель основного насоса 2. Одновременно цифровые сигналы в соответствии с выбранной программой Открыть с выхода контроллера 28 по интерфейсной линии связи поступают на вход широтно-импульсного модулятора 27, где преобразуются в широтно-импульсный сигнал, поступающий на электронный усилитель 25 через электронный ключ, имеющийся на выходе широтно импульсного модулятора и через широтно-импульсный преобразователь 26, который преобразует широтно-импульсный сигнал в непрерывный сигнал, соответствующий заданной скорости перемещения затвора. С выхода электронного усилителя 25 непрерывный сигнал управления поступает на электромеханический преобразователь 13 электрогидравлического усилителя 12.
Первоначально сигнал управления, поступающий на электромеханический преобразователь 13, равен нулю и золотник электрогидравлического усилителя 12, под действием давления рабочей жидкости в. полости 17 управления, находится в среднем положении, перекрывая полости 11, 20 и 21, 22. Напорная магистраль основного насоса 2 заперта, он начинает выходить на рабочий режим, при этом регулятор 3 мощности, за счет давления рабочей жидкости, поступающей в его полость через регулируемый дроссель 7 от дополнительного насоса 4, установит максимальную производительность основного насоса 2, а затем, при достижении в напорной магистрали давления рабочей жидкости, равного номинальному рабочему давлению, уменьшит производительность основного насоса 2 до минимума. Сигнал управления, выдаваемый контроллером 28 на электромеханический преобразователь 13 электрогидравлического усилителя 12, непрерывно изменяется в функции времени, пропорционально запрограммированному закону перемещения затвора 34, соответственно изменяется и положение золотника электрогидравлического усилителя 12. Золотник начинает смещаться (вправо по фиг,1) и сообщает исполнительную полость 11с полостью 20 питания, рабочая жидкость из напорной магистрали основного насоса 2 начинает поступать через обратный клапан 8, фильтр 9, полости 11 и 20 электрогидравлического усилителя 12, в штоковую полость 19 гидроцилиндра 1, при этом давление в напорной магистрали уменьшается и регулятор 3 мощности автоматически увеличивает производительность основного насоса 2 на величину, при которой в напорной магистрали установится номинальное рабочее давление, затвор 34 начинает движение вверх со скоростью, заданной запрограммированным законом движения. Рабочая жидкость из поршневой полости 23 гидроцилиндра 1 вытесняется в сливной бак 5 через гидр/эли- нию 24. По мере движения затвора 34 гармонические сигналы, определяющие положение затвора, от сельсинов 29 и 30, кинематически связанных со штоком 33 гидроцилиндра 1, поступают на фазоим- пульсный преобразователь 35, где преобразуются.в фазоимпульсный сигнал, который поступает на вход микропроцессорного контроллера 28 через измерительный узел 36, который преобразует его в цифровой сигнал положения затвора 34. Контроллер 28 сравнивает цифровой сигнал положения затвора, поступающий от измерительного блока с сигналом программы и производит коррекцию выходного сигнала управления, выдаваемого на электрогидравлический усилитель 12, в результате электрогидравлический усилитель 12 корректирует расход рабочей жидкости, поступающей в штоковую полость 19
гидроцилиндра 1, а следовательно, и скорость подъема затвора 34.
При достижении затвором 34 конечного положения Открыть контроллер 28 прекращает выдавать цифровые сигналы на ши0 ротно-импульсный модулятор 27 и согласующий узел 37. Электродвигатель основного насоса 2 останавливается, золотник электрогидравлического усилителя 12 под действием давления рабочей жидкости
5 в полости управления 17 устанавливается в среднем положении, перекрывая полости 11, 20 и 21. 22, гидрораспределитель 14 отключает полость 17 управления электрогидравлического усилителя 12 от напорной
0 магистрали, затвор 34 останавливается и удерживается в этом положении рабочей жидкости, замкнутой в штоковой полости 19 гидроцилиндра 1.
При необходимости опускания затвора
5 в положение Закрыть на пульте 40 управления включается ключ Питание контроллера, при этом на микропроцессорный контроллер 28 подается питание и он начинает выполнять программу ожидания, кото0 рая включает подпрограмму самоконтроля и операции запроса состояния буферного регистра 39. В контроллере 28 формируются цифровые сигналы в соответствии с программой самоконтроля, записанной в ПЗУ
5 контроллера. С выхода контроллера 28 сигналы самоконтроля по интерфейсной линии связи поступают на узел 41 контроля, где они дешифрируются и преобразуются в сигнал Готовность контроллера, который сви0 детельствует о готовности контроллера 28 к работе по заданной программе. Далее на пульте управления 40 включается ключ Закрыть, в результате чего подается сигнал на буферный регистр 39, который запоминает
5 поданный сигнал и позволяет повторно запрашивать его в процессе работы или при случайном сбое в работе контроллера 28. По окончании работы буферный регистр 39 обнуляется сигналом от контроллера. Из бу0 ферного регистра 39 сигнал команды поступает на контроллер и он переходит к выполнению программы. Закрыть, записанной в его ПЗУ. В контроллере 28 формируются цифровые сигналы в соответствии с
5 программой Закрыть, которые с выхода контроллера 29 по интерфейсной линии связи поступают на вход согласующего узла 37. где преобразуются в релейный сигнал управления, поступающий через электронный ключ, имеющийся на выходе этого блока, на
электромагнит гидрораспределителя 14, который включается и сообщает напорную ма- гистраль с полостью 17 управления электрогидравлического усилителя 12 через фильтр 15 и редукционный клапан 16. Одновременно цифровые сигналы в соответствии с программой Закрыть, с выхода контроллера 28 по интерфейсной линии связи поступают на вход широтно-импульсного модулятора 27, где преобразуются в широт- но-импульсный сигнал, поступающий на электронный усилитель 25 через электронный ключ, имеющийся на выходе широтно- импульсного модулятора, и через широтно-импульсный преобразователь 26, который преобразует широтно-импульсный сигнал в непрерывный сигнал, соответствующий заданной скорости перемещения затвора. С выхода электронного усилителя 25 непрерывный сигнал управления поступает на электромеханический преобразователь 13 электрогидравлического усилителя 12. Первоначально сигнал управления, поступающий на электромеханический преобразователь 13, равен нулю и золотник электрогидравлического усилителя 12, под действием давления рабочей жидкости в полости 17 управления, находится в среднем положении, перекрывая полости 11, 20 и 21, 22, затвор не движется. Сигнал управления, выдаваемый контроллером 28 на электромеханический преобразователь 13 электрогидравлического усилителя 12,непрерывно изменяется в функции времени, пропорционально запрограммированному закону перемещения затвора 34, соответс/венно изменяется и положение золотника в электрогидравлического усилителя 12;золотник начнет смещаться влево (фиг.1) и сообщает исполнительную полость 11 электрогидравлического усилителя 12 со сливной полостью 22, а исполнительную полость 21 с полостью 20 питания. Рабочая жидкость, вытесняемая под действием веса затвора 34, из штоковой полости 19 гидроцилиндра 1, перетекает в поршневую полость 23, проходя через полость 20 питания и исполнительную полость 21 электрогидравлического усилителя 12, а также через обратный клапан 18, исполнительную полость 11 и сливную полость 22 электрогидравлического усилителя 12. Затвор под действием собственного веса начинает двигаться вниз со скоростью, заданной запрограммированным законом движения.Так как при опускании затвора увеличивающийся объем поршневой полости 23 гидроцилиндра 1 больше, чем объем жидкости, вытесняемый из штоковой полости 19, то по гидролинии 24 производится дополнительный подсос рабочей жидкости из сливного бака 5. По мере движения затвора 34 гармонические сигналы, определяющие положение затвора, от сельсинов 29 и 30, 5 кинематически связанных со штоком 33 гидроцилиндра 1, поступают на фазоимпульс- ный преобразователь 35, где преобразуются в фазоимпульсный сигнал, который поступает на вход микропроцес0 сорного контроллера 28 через измерительный узел 36, который преобразует его в цифровой сигнал положения затвора 34. Контроллер 28 сравнивает цифроврй сигнал положения затвора, поступающий от изме5 рительного узла, с сигналом программы и производит коррекцию выходного сигнала управления, выдаваемого на электрогидравлический усилитель 12. В результате электрогидравлический усилитель 12 кор0 ректирует расход рабочей жидкости, вытес- няемой из штоковой полости 19 гидроцилиндра 1, а следовательно, и скорость опускания затвора 34.
При достижении затвором 34 конечного
5 положения Закрыть контроллер 28 прекращает выдавать цифровые сигналы на ши- ротно-импульсный модулятор 27 и согласующий блок 37. Золотник электрогидравлического усилителя 12, под действием
0 давления рабочей жидкости в полости 17 управления,устанавливается в среднее положение, перекрывая полости 11, 20 и 21, 22, гидрораспределитель 14 отключает полость управления 17 электрогидравлическо5 го усилителя 12 от напорной магистрали, затвор 34 останавливается и удерживается в этом положении рабочей жидкостью, замкнутой в штоковой полости 19 гидроцилиндра 1.
0 В процессе выполнения программы любой технологической операции в контроллере 28 также формируются цифровые сигналы в соответствии с программой самоконтроля, записанной в ПЗУ контроллера. С
5 выхода контроллера 28 сигналы самоконтроля по интерфейсной линии связи поступают на узел 41 контроля, где они дешифруются и преобразуются в сигнал Готовность контроллера. В случае выхода из строя контрол0 лер 28 не сможет сформировать цифровые сигналы в соответствии с программой самоконтроля, а следовательно, сигнал Готовность контроллера не поступает на электронные ключи широтно-импульсного
5 модулятора 27 и согласующего узла 37, и они закроются, блокируя прохождение ложных управляющих сигналов на исполнительные механизмы. При этом исполнительные механизмы займут исходное нерабочее состояние, затвор остановится.
Введение в предлагаемом устройстве новых связей гидравлических элементов повышает в два раз скорость движения затвора при опускании под действием силы тяжести за счет параллельной работы двух кромок электрогидравлического усилителя на слив, так как площадь проходного сечения полостей электрогидравлического усилителя увеличивается в два раза. При этом также повышается надежность работы и упрощается конструкция устройства управления приводом, поскольку в работе участвует всего один гидравлический элемент с аналоговым управлением. Введение фазоимпуль- сного преобразователя в указанных связях с остальными элементами электрогидравлической системы привода затвора шлюза, улучшает помехозащищенность сигнала об- ратной связи, поступающего о сельсин-датчиков пути затвора к блоку программного управления, поскольку сигнал передается в фазоимпульсной форме, что исключает отказы блока программного управления из-за проникновения помехи в сигнал обратной связи, и значительно повышает надежность его работы. Таким образом, использование предлагаемого изобретения позволяет существенно повысить пропускную способность шлюза.
Формула изобретения 1. Устройство управления гидроприводом затвора шлюза, содержащее блок программного управления, выполненный в виде контроллера с интерфейсной линией связи для подключения узлов контроля, согласующего и измерительного, а также ши- ротно-импульсного модулятора и буферного регистра, связанного с пультом управления блока программного управления, электрогидравлический усилитель с электромеханическим преобразователем, подключенным через электронный усилитель и широтноимпульсный преобразователь к широтно- импульсному модулятору, основной насос и подключенный к его регулятору мощности через регулируемый дроссель дополнительный насос с предохранительным клапаном, напорную магистраль с установленными на ее входе обратным клапаном, фильтром и предохранительным клапаном, тиристор- ный пускатель электродвигателей насосов,
подключенный к выходу согласующего узла, и датчик пути затвора, выполненный в виде двух бесконтактных сельсинов, кинематически связанных через трособлочную передачу со штоком гидропривода затвора, а
электрически - со входом измерительного узла блока программного управления, отличающееся тем, что. с целью упрощения конструкции и повышения быстродействия, устройство управления снабжено редукционным клапаном, дополнительным фильтром и гидрораспределителем с электромеханическим управлением, включенными последовательно между полостью управления злектрогидравлического усилителя и напорной магистралью, причем штоковая полость гидроцилиндра соединена с полостью питания электрогидравлического усилителя непосредственно, а с напорной магистралью - через обратный клапан, а поршневая полость гидроцилиндра соединена со сливной полостью и с одной из исполнительных полостей элекгрогидравлического усилителя, другая исполнительная полость
которого соединена с напорной магистралью.
2. Устройство по п. 1, отличающее- с я тем, что, с целью повышения надежности в работе, устройство снабжено фазоимпульсным преобразователем, входы которого подключены к выходам бесконтактных сельсинов, а выход - к измерительному узлу блока программного управления.
25 .36
----- -Gj -L
,1S40 rVj
V 7 V
3V
n 1я r
r
&
39 30
ffi-- - - - 1
1.35
25 .36
I
V
Fil
n 1я r ft.



| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления гидроприводом затвора шлюза | 1986 |
|
SU1406295A1 |
| Электрогидравлическая система привода двухстворчатых ворот шлюза | 1986 |
|
SU1472565A1 |
| Система управления гидроприводом двустворчатых ворот и затворов наполнения низконапорного шлюза | 1990 |
|
SU1767076A1 |
| Устройство управления гидроприводом затвора шлюза | 1988 |
|
SU1647074A1 |
| Гидропривод гидротехнического затвора | 1988 |
|
SU1574719A1 |
| Устройство управления гидроприводом затвора шлюза | 1985 |
|
SU1282081A1 |
| Электрогидравлическая система привода двустворчатых ворот шлюза | 1989 |
|
SU1680858A1 |
| Гидропривод гидротехнического затвора | 1988 |
|
SU1631114A1 |
| Электрогидравлическая система привода двустворчатых ворот шлюза | 1991 |
|
SU1775527A1 |
| Автоматизированный электрогидравлический стенд для обкатки и испытания редукторов с двумя пересекающимися кинематическими цепями | 1990 |
|
SU1740812A1 |
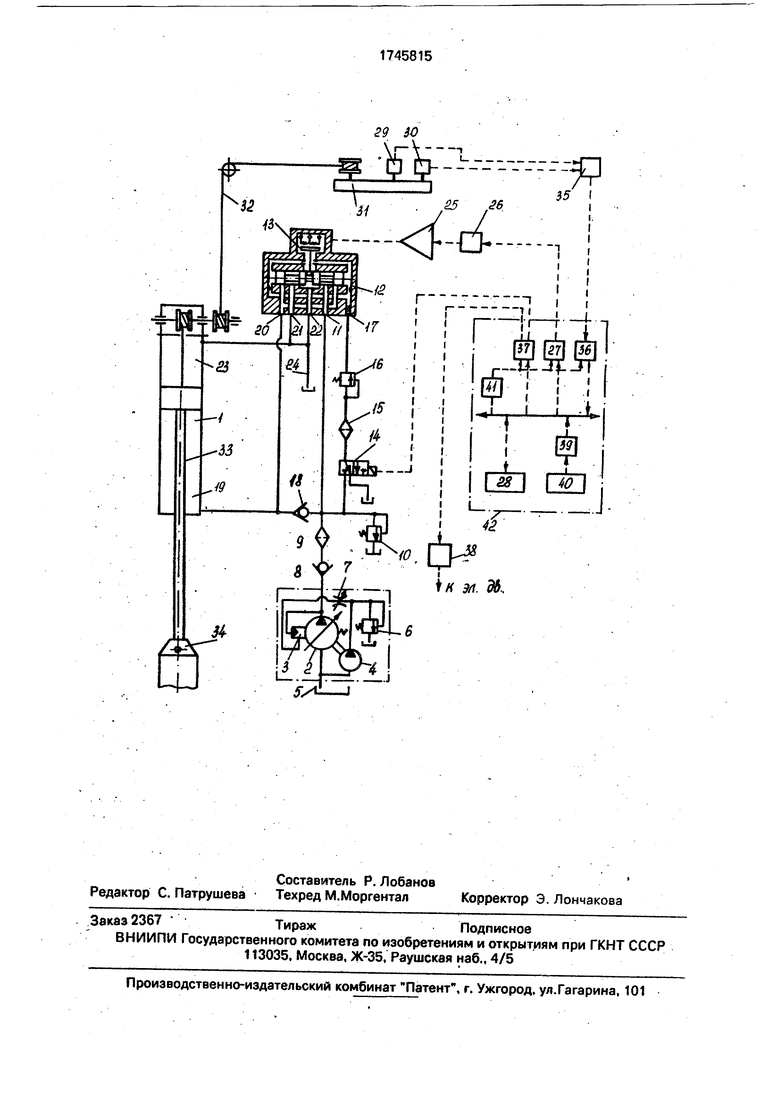
Изобретение относится к системам гидроавтоматики и может быть использовано в гидравлических приводах механизмов затворов галерей судоходных шлюзов. Цель изобретения - упрощение конструкции и повышение быстродействия и надежности работы. Устройство управления гидроприводом затвора 34 шлюза содержит основной и дополнительный насосы с регулятором мощности, электрогидравлический усилитель, включенный последовательно в напорную магистраль, позволяющий при использовании максимального проходного сечения его полостей сочетать объемное регулирование скорости движения затвора с дроссельным. Для noИзобретение относится к гидроавтоматизации управления подъемными механизмами и может быть использовано в гидравлических подъемниках затворов гидротехнических сооружений, например затворов галерей судоходных шлюзов. Цель изобретения - упрощение конструкции и повышение быстродействия и надежности в работе, при этом обеспечивается вышения надежности устройство содержит фазоимпульсный преобразователь, повышающий помехозащищенность сигнала обратной связи о пройденном затвором пути, и узел самоконтроля стабильности работы микропроцессорного контроллера, автоматически восстанавливающий систему управления при случайных сбоях микропроцессорного контроллера, а также буферный регистр, запоминающий команду, поданную на выполнение технологической операции и автоматически восстанавливающий ее с момента случайного сбоя. Работа устройства осуществляется по программе, заложенной в микропроцессорном контроллере блока программного управления, включающего блоки согласующий, измерительный и самоконтроля, а также пульт управления для набора кода команды управления на маневрирование затвором и широтно-им- пульсный модулятор для передачи кодированной информации через широт- но-импульсный преобразователь и усилитель аналогового сигнала на вход электромеханического преобразователя электрогидравлического усилителя. 1 з.п. ф- лы, 1 ил. повышение пропускной способности шлюза путем увеличения скорости маневрирования затвором и повышение надежности работы блока программного управления устройства. На чертеже приведена электрогидравлическая схема устройства управления гидроприводом затвора шлюза. И vj N СЛ 00 СЛ
| Устройство управления гидроприводом затвора шлюза | 1986 |
|
SU1406295A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
