п а 15 л w л
.17
s
(Л
ел
со о 00 со
4
тей электропривода, уменьшение энергоемкости и повышение электробезопасности, 3neKtponpHBOA содержит двигатель поступательного перемещения, состоящий из неподвижного индуктора и подвижного якоря. Индуктор содержит магнитопровод 1, в пазу которого размещена обмотка 2. К корпусу индуктора крепятся подшипники 4, 5 скольжения, направляющие движения якоря, содержащего магнитопровод 6 и две короткозамкнутые обмотки 7,8„ На передней части якоря выполнен скос, на который опирается ролик 10 механического передающего звена.
содержащего два рычага П., 12, соединенных пружиной 14. Свободный конец рычага 12 связан с одним концом троса 16, другой конец которого соединен с плунжером 24, перемещающимся в корпусе 23 держателя рабочего инструмента. Усилие от двигателя передается рабочему инструменту через рычажную передачу и трос, что позволяет полнее использовать возможности двигателя, уменьшить габариты и массу той части инструмента, которая непосредственно находится в руке работающего, расширить область применения электропривода. 2 ил
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидродвигатель | 1983 |
|
SU1270847A1 |
| ЭЛЕКТРОДИНАМИЧЕСКИЙ УДАРНЫЙ МЕХАНИЗМ | 1997 |
|
RU2135767C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ДВИГАТЕЛЬ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ | 2011 |
|
RU2485662C1 |
| Однофазный линейный асинхронный двигатель | 1981 |
|
SU1007164A1 |
| ЛИНЕЙНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2004 |
|
RU2275732C2 |
| Индукционный электродвигатель возвратно-поступательного движения | 1987 |
|
SU1457108A1 |
| УСТРОЙСТВО ДЛЯ ПРОТИВОПОЖАРНОЙ ЗАЩИТЫ АВТОМОБИЛЯ | 2022 |
|
RU2790891C1 |
| Электрический двигатель возвратнопоступательного движения | 1974 |
|
SU686126A1 |
| Асинхронный двигатель с разомкнутым магнитопроводом индуктора | 1983 |
|
SU1104619A1 |
| Многофазный ветрогенератор переменного тока | 2017 |
|
RU2658316C1 |
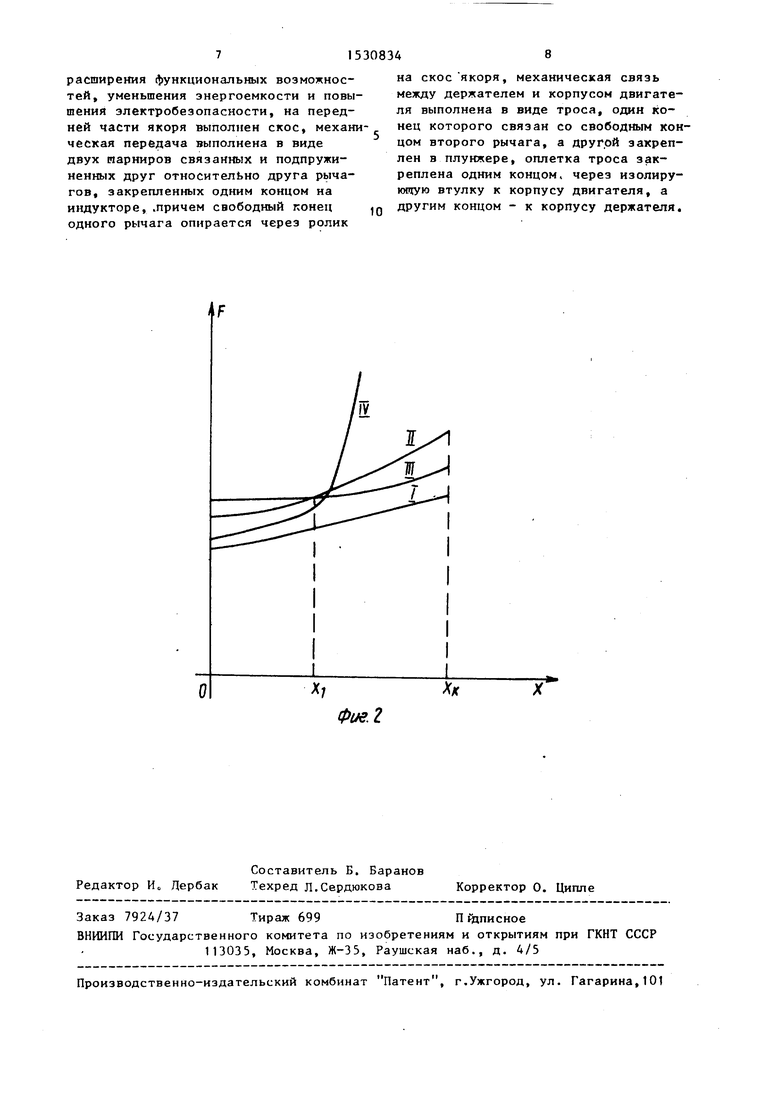
Изобретение относится к электротехнике и, в частности, к электроприводам ручного инструмента, такого, например, как электробокорезы, электропилы, электронапильники, электроножницы и т.п. Цель изобретения - расширение функциональных возможностей электропривода, уменьшение энергоемкости и повышение электробезопасности. Электропривод содержит двигатель поступательного перемещения, состоящий из неподвижного индуктора и подвижного якоря. Индуктор содержит магнитопровод 1, в пазу которого размещена обмотка 2. К корпусу индуктора крепятся подшипники скольжения 4, 5, направляющие движение якоря, содержащего магнитопровод 6 и две короткозамкнутые обмотки 7, 8. На передней части якоря выполнен скос, на который опирается ролик 10 механического передающего звена, содержащего два рычага 11, 12, соединенных пружиной 14. Свободный конец рычага 12 связан с одним концом троса 16, другой конец которого соединен с плунжером 24, перемещающимся в корпусе 23 держателя рабочего инструмента. Усилие от двигателя передается рабочему инструменту через рычажную передачу и трос, что позволяет полнее использовать возможности двигателя, уменьшить габариты и массу той части инструмента, которая непосредственно находится в руке работающего, расширить область применения электропривода. 2 ил.
Изобретение относится к электротехнике, в частности к электроприводам ручного инструмента, такого например, как электробокорезы, электропилы, электронапильники, электроножницы и другие и может быть использовано в различных отраслях народного хозяйства.
Целью изобретения является расширение функциональных возможностей уменьшение энергопотребления и повышение электробезопасности электропривода.
На фиг.1 представлена принципиальная конструкция электропривода ручного инструмента; на фиго2 - зависимость величины перемещения якоря от действующи на него усилий.
Электропривод ручного инструмента содержит двигатель поступательного перемещения, состоящий из неподвижного индуктора и подвижного якоря Неподвижный индуктор состоит из магнито провода 1, в пазу которого размещена обмотка 2 возбуждения. К корпусу 3 индуктора крепятся подшипники 4 и 5 скольжения (последний имеет на боковой поверхности окно), направляющие движение якоря двигателя, содержащего магнитопровод 6 и размещенные в пазах ускоряющую 7 и тормозную 8 короткозамкнутые обмотки, выполненны из материала с высокой электропроводностью В исходном положении якорь расположен так, что ускоряющая корот козамкнутая обмотка 7 расположена ближе к поперечной оси а-а, чем тормозная. В исходном положении якорь удерживается с помощью возвратной
0
5
0
5
40
45
50
55
пружины 9. На передней части магни- топровода якоря выполнен скос, на который опирается ролик 10 механического передающего звена Звено содержит два рычага, причем первый рычаг 11 выполнен в виде V-образной пластины охватывающей второй рычаг 12 Каждый из рычагов одним концом крепится к корпусу 3 индуктора посредством шарнирного кольца 13. В исходном положении рычаг 12 опирается на рычаг 11 и удерживается в этом положении под действием предварительно поджатой пружины 14, один конец которой опира-( ется на рычаг 11, а второй - на рычаг 12. Таким образом рычаги механически связаны между собой через пружину 14о Свободный конец рычага 11 опирается на ролик 10. Свободный конец рычага 12 через изолирующую втулку 15 связан с одник концом троса 16, конец оплетки 17 которого закреплен в изолирующей втулке 18, укрепленной на корпусе 19 двигателя В корпусе 19 двигателя жестко через изолирующие прокладки 20 и 21 закрепляется двигатель. Противоположный конец оплетки 17 жестко связан с заглушкой 22 корпуса 23 держателя инструмента. Второй конец троса 16 жестко закреплен в плунжере 24, к которому посредством резьбы может крепиться подвижная часть рабочего инструмента В исходном положении плунжер 24 удерживается пружиной 25.
К электроприводу могут присоединяться различные инструменты (насадки), например бокорезы (фиг,1) Неподвижная часть бокорезов 26 кре51530834
пится к корпусу 23 держателя инстру-мента с помощью накидной гайки 28, а подвижная часть бокорезов 27 - к плунжеру 24,
Электропривод работает следующим образом.
При подаче импульса тока на об- мотку 2 возбуждения магнитный поток созданный током, проходя по магнито- проводу 1 индуктора и магнитопрово- ду 6 якоря, наводит ЭДС в коротко- замкнутой обмотке 7. По закону Ленца
10
(
dV ч dt
dv dt изменение
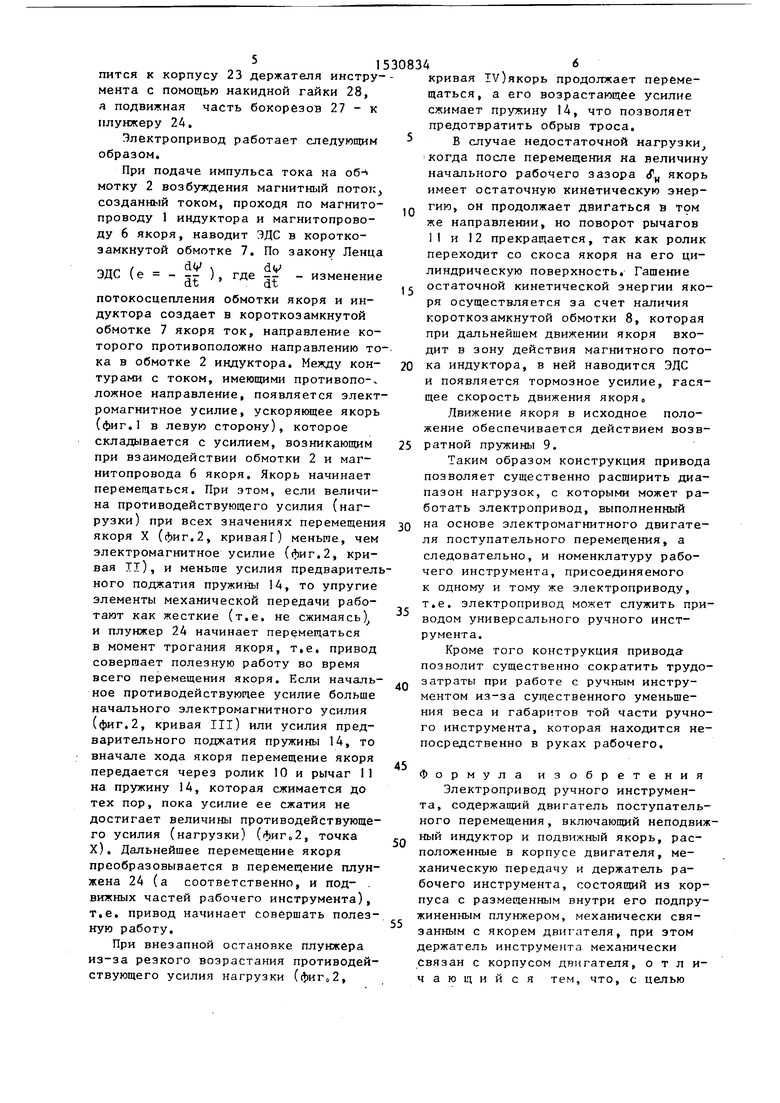
потокосцепления обмотки якоря и индуктора создает в короткозамкнутой обмотке 7 якоря ток, направление которого противоположно направлению тока в обмотке 2 индуктора. Между контурами с током, имеющими противопо- ложное направление, появляется электромагнитное усилие, ускорякяцее якорь (фиг,1 в левую сторону), которое складывается с усилием, возникающим при взаимодействии обмотки 2 и маг- нитопровода 6 якоря. Якорь начинает перемещаться. При этом, если величина противодействующего усилия (нагрузки) при всех значениях перемещени якоря X (фиг,2, кривая) меньше, чем электромагнитное усилие (фиг,2, кривая 11), и меньше усилия предварителного поджатия пружины 14, то упругие элементы механической передачи работают как жесткие (т,е, не сжимаясь) и плунжер 24 начинает перемещаться в момент трогания якоря, т,е, привод совершает полезную работу во время всего перемещения якоря. Если начальное противодействующее усилие больше начального электромагнитного усилия (фиг,2, кривая III) или усилия предварительного поджатия пружины 14, то вначале хода якоря перемещение якоря передается через ролик 10 и рычаг II на пружину 14, которая сжимается до тех пор, пока усилие ее сжатия не достигает величины противодействующего усилия (нагрузки) (, точка Х), Дальнейшее перемещение якоря преобразовывается в перемещение плун- жена 24 (а соответственно, и под- . вижных частей рабочего инструмента), т.е, привод начинает совершать полезную работу.
При внезапной остановке плунжера из-за резкого возрастания противодействующего усилия нагрузки (фиГо2,
10
15
20
5
0
5
0
5
0
5
кривая 1У)якорь продолжает перемещаться, а его возрастающее усилие сжимает пружину 14, что позволяет предотвратить обрыв троса,
В случае недостаточной нагрузки когда после перемещения на величину 11ачапьного рабочего зазора Гц якорь имеет остаточную кинетическую энергию, он продолжает двигаться в гом же направлении, но поворот рычагов II и 12 прекращается, так как ролик переходит со скоса якоря на его цилиндрическую поверхность. Гашение остаточной кинетической энергии якоря осуществляется за счет наличия короткозамкнутой обмотки 8, которая при дальнейшем движении якоря входит в зону действия магнитного потока индуктора, в ней наводится ЭДС и появляется тормозное усилие, гасящее скорость движения якоря,
Движение якоря в исходное положение обеспечивается действием возвратной пружины 9.
Таким образом конструкция привода позволяет существенно расширить диапазон нагрузок, с которыми может работать электропривод, выполненный на основе электромагнитного двигателя поступательного перемещения, а следовательно, и номенклатуру рабочего инструмента, присоединяемого к одному и тому же электроприводу, т,е, электропривод может служить приводом универсального ручного инструмента.
Кроме того конструкция привода позволит существенно сократить трудозатраты при работе с ручным инструментом из-за существенного уменьшения веса и габаритов той части ручного инструмента, которая находится непосредственно в руках рабочего.
Формула изобретения
Электропривод ручного инструмента, содержаний двигатель поступательного перемещения, включающий неподвижный индуктор и подвижный якорь, расположенные в корпусе двигателя, механическую передачу и держатель рабочего инструмента, состоящий из корпуса с размещенным внутри его подпружиненным плунжером, механически связанным с якорем двигателя, при этом держатель инструмента механически связан с корпусом двигателя, отличающий ся тем, что, с целью
расширения функциональных возможностей, уменьшения энергоемкости и повышения электробезопасности, на передней части якоря выполнен скос, механическая передача выполнена в виде двух шарниров связанных и подпружиненных друг относительно друга рычагов, закрепленных одним концом на индукторе, .причем свободный нонец одного рычага опирается через ролик
О
X;Хк
Фие.г
на скос якоря, механическая связь между держателем и корпусом двигателя выполнена в виде троса, один конец которого связан со свободным концом второго рычага, а другой закреплен в плунжере, оплетка троса закреплена одним концом, через изолирующую втулку к корпусу двигателя, а другим концом - к корпусу держателя.
| Ручной клепальный пресс | 1984 |
|
SU1245393A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
