Изобретение относится к измери- 5 тельной технике и приборам управления.
Цель изебретення - расширение функ циональных возможностей за счет одновременного измерения составляющей ускорения.
На Лиг.1 изображен датчик, прог дольный разрез; на фиг.2 - разрез А-А на фиг.1; на фиг.3 - разрез Б-Б на фиг.I; на фиг.4 - электрическая схема подключения преобразователей. Устройство содержит ось 1, совмещенную с осью цилиндрической полос- ти корпуса 2, жестко скрепленный с помощью хомутов 3 маятник, состоящий их двух торцовых частей А и 5 , жестко соединенных со средней частью 6 двумя винтами. В верхней части полости на оси 1 установлен на двух шарикоподшипниках 7 груз 8 с ребристой наружной поверхностью. Ребра направлены вдоль плоскости вращения. Ось 1 связана с грузом 8 двумя противодействующими плоскими спиральными пружинами 9 и 10. Внутренние концы спиралей пружин входят и упираются в местные пазы на оси 1, расположенные диаметрально противоположно. Концы наружных витков спиралей пружин прилегают через пластины 11 к противоположным торцам груза, перпендикулярным плоскости вращения, и упираются в выступы на торцах. При установке обе пружины закручиваются на угол, больший предельного угла отклонения груза.
Со стороны обоих торцов стенок полости к грузу прикреплены винтами. 12 Аланцы 13 и 14. В кольцевой расточке на торце корпуса 2 установлены симметрично два идентичных кольцевых потенциометра (проволочных резистивных элемента) 15 и 16. Напротив середин контактных дорожек каждого из потенциометров установлены токосьемники 1 и 18.Верхний токосъемник 17 укреплен на изолирующей колодке 19, которая прикреплена к фланцу 13. Конец токо- съемника 17 присоединен к наружному -концу плоской спиральной пружины 20. Внутренний конец этой спиральной пружины укреплен на оси 1 через изолирующую прокладку 21 и к нему присое- динен провод 22, пропущенный через осевое и радиальное отверстия в оси 1. Нижний токосъемник 18 укреплен на изолирующей колодке 23, которая
5 0 5 о
Q 5Q
5
прикреплена к торцовой части 4 маят- ника. Конец токосъемника 18 присоединен к проводу 24, пропущенному через осевое и радиальное отверстия в оси 1.
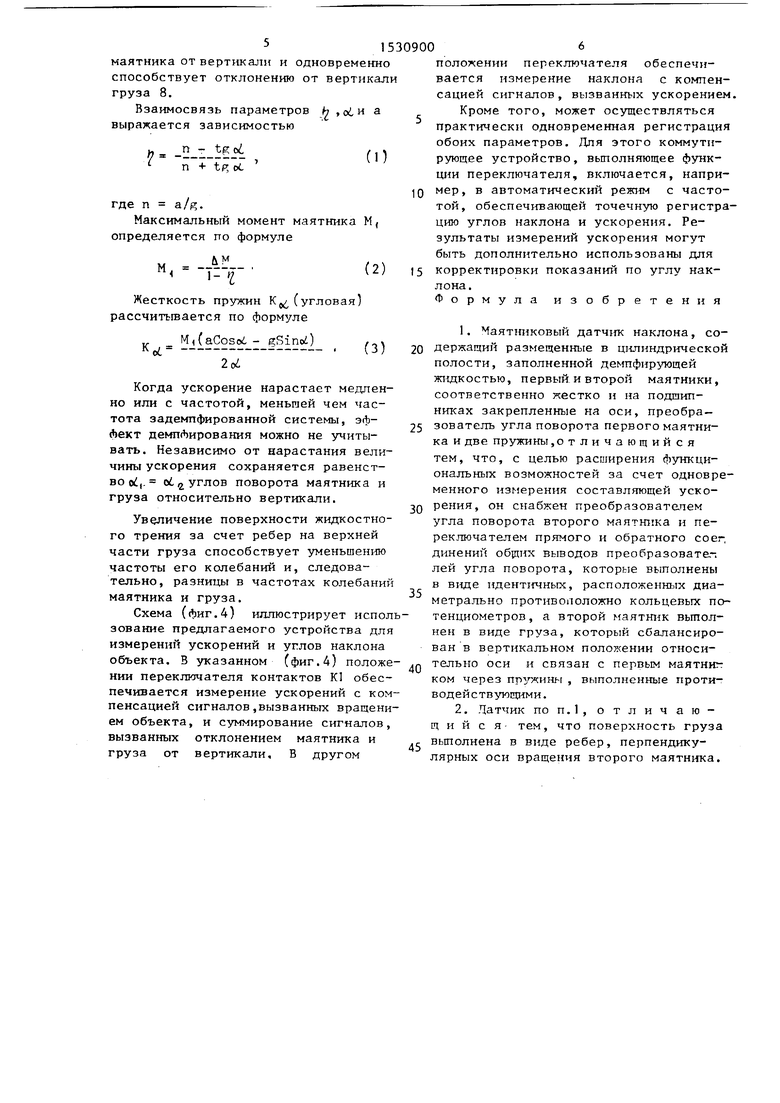
Кольцевые потенциометры 15 и 16, связанные токосъемниками 17 и 18 с грузом 8 и маятником, 1гмеют равные полные совпротивления (фиг.4). При помощи переключателя контактов К 1.1 и К 1.2 могут образоваться два варианта мостовой измерительной электрической схемы (для измерения наклона объекта и для измерения его ускорения). Выходной сигнал снимается с контактов С и D, На контакты А и В подается опорное напряжение.
Устройство работает следующим образом.
При отсутствии ускорений объекта спиральные пружины 9 и 10 удерживают груз 8 в вертикальном положении неподвижно относительно маятника. Вращение корпуса 2 не вызывает отклонений системы маятник-груз от вертикали, так как зазоры между стенками полости корпуса 2, поверхностями 4-6 маятника и груза 8 больше толщины пограничного слоя жидкости.
Т1рн ускорении объекта (или его торможении) ,маятник и груз 8 поворачиваются встречно в направлении, противоположном ускорению, вытесняя жидкость из объема между ними через зазоры. При этом одна из пружин ис- пытьшает дополнительное напряжение, а другая - разгрузку.
Момент маятника в горизонтальном положении от действия земного ускорения больше соответствукщего момента груза на величину ДМ, обеспечивающую требуемый порог чувствительности датчика. Обратное отношение указанных моментов выбирается в пределах 0,6-0,8.
Диапазон измерений ускорений для каткдого датчика зависит от суммарной жесткости его спиральных пружин 9 и 10. Для изменения диапазона достаточно установить другую пару пружин. Жесткость пружин рассчитг шают для условий, при которых достигается равенство углов отклонения маятника и груза 8 при воздействии постоянного ускорения а. При зтом d dj d. Вьтолнение этого равенства возможно благодаря тому, что пр,и встречном наклоне маятш-гка и груза земное ускорение g противодействует i отклонению
маятника от вертикали и одновременно способствует отклонению от вертикали груза 8.
Взаимосвязь параметров выражается зависимостью
0 п + tf; оС
, ,oi,H а (1)
где п a/g.
Максимальный момент маятника определяется по формуле
М
ЛМ
Жесткость пружин К (угловая) рассчитьгоается по формуле
... M,(aCosoi- gSinoi) ,-4
. (з;
2oL
Когда ускорение нарастает медленно или с частотой, меньшей чем частота задемпфированной системы, эф- Лект демпЛирования можно не учитывать. Независимо от нарастания величины ускорения сохраняется равенство od,. oL yrnoB поворота маятника и груза относительно вертикали.
Увеличение поверхности жидкостного трения за счет ребер на верхней части груза способствует уменьшению частоты его колебаний и, следовательно, разницы в частотах колебаний маятника и груза.
Схема (фиг.4) иллюстрирует использование предлагаемого устройства для измерений ускорений и углов наклона объекта. В указанном (фиг.4) положении переключателя контактов К обеспечивается измерение ускорений с компенсацией сигналов,вызванных вращением объекта, и суммирование сигналов, вызванных отклонением маятника и груза от вертикали, В другом
10
15
20
ь
25
30
35
40
45
положении переключателя обеспечивается измерение наклона с компенсацией сигналов, вызванных ускорением.
Кроме того, может осуществляться практически одновременная регистрация обоих параметров. Для этого коммутирующее устройство, выполняющее функции переключателя, включается, например, в автоматический режим с частотой, обеспечивающей точечную регистрацию углов наклона и ускорения. Результаты измерений ускорения могут быть дополнительно использованы для корректировки показаний по углу наклона. Формула изобретения
1. Маятт1ковый датчик наклона, содержащий размещенные в цилиндрической полости, заполненной демпфирующей жидкостью, первый и второй маятники, соответственно жестко и на подшипниках закрепленные на оси, преобразователь угла поворота первого маятника и две пружины,отличающийся тем, что, с целью расширения функциональных возможностей за счет одновременного измерения составляпощей ускорения, он снабжен иреобразоватепем угла поворота второго маятника и переключателем прямого и обратного соег, динений общих выводов преобразовате- лей угла поворота, KOTOphie выполнены в В1аде идентттчных, расположенных диаметрально противоположно кольцевых потенциометров, а второй маятник вьтол- нен в виде груза, который сбалансирован в вертикальном положении относительно оси и связан с первьм маятник ком через пружины , выполненные противодействующими.
2. Датчик ПОП.1, отличающий с я тем, что поверхность груза вьшолнена в виде ребер, перпендикулярных оси вращения второго маятника.
Фие2
6-5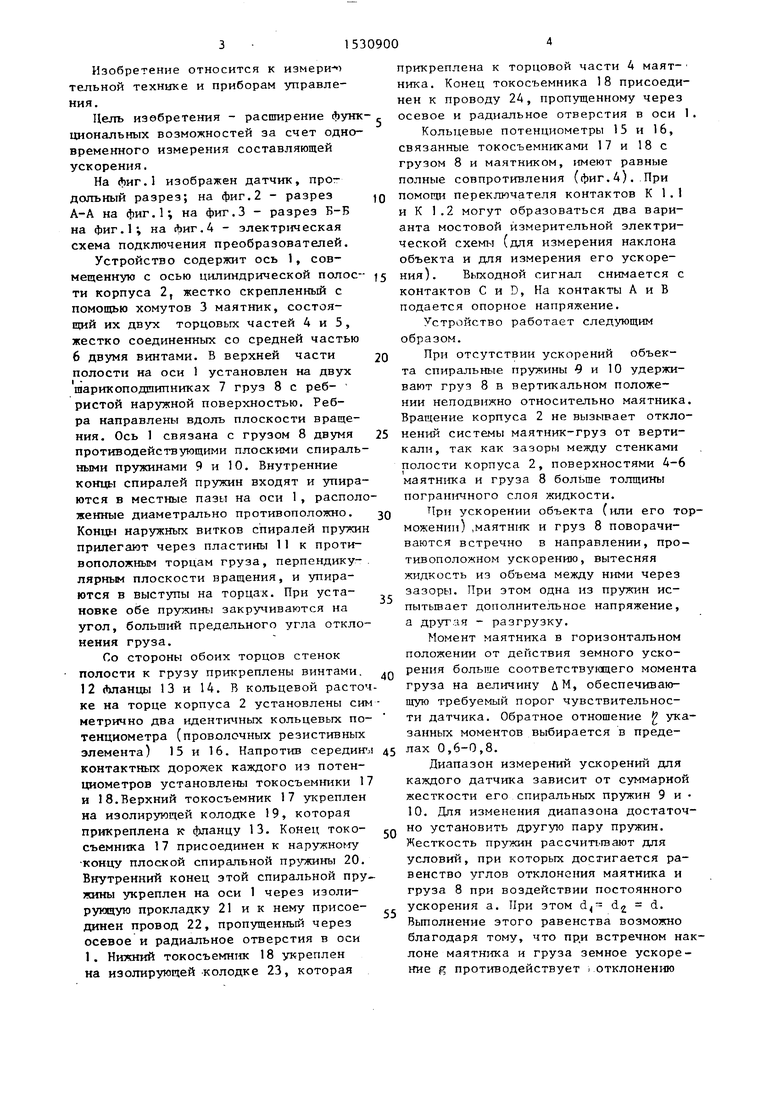
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения углов наклона | 1985 |
|
SU1434255A1 |
| Устройство для измерения углов наклона | 1985 |
|
SU1377583A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА ПУСКА БОЕПРИПАСА ЕГО БОРТОВЫМ ДАТЧИКОМ ДО СТАРТА ПРИ ОТСУТСТВИИ ЭЛЕКТРОПИТАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2002 |
|
RU2224204C1 |
| Датчик маятниковый | 1985 |
|
SU1332146A1 |
| Устройство для определения угла отклонения подвижного объекта от вертикали | 1981 |
|
SU1065688A1 |
| Маятниковый датчик угла наклона | 1984 |
|
SU1312387A1 |
| Маятниковый датчик ускорений | 1987 |
|
SU1569726A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛА НАКЛОНА ПОДВИЖНОГО ОБЪЕКТА | 1993 |
|
RU2065572C1 |
| Устройство для ориентирования датчиков | 1982 |
|
SU1102916A1 |
| Устройство для ориентирования чувствитель-НыХ элЕМЕНТОВ | 1978 |
|
SU851306A2 |
Изобретение относится к измерительной технике и приборам управления. Цель изобретения - расширение функциональных возможностей датчика за счет одновременного измерения составляющей ускорения. Датчик содержит размещенные в цилиндрической полости, заполненной демпфирующей жидкостью, две пружины 9 и 10, а также первый маятник, состоящий из частей 4-6, и второй маятник 8, которые укреплены соответственно жестко на оси 1 и на подшипниках 7. Датчик содержит два преобразователя 15, 17 и 16, 18 угла наклона в электрический сигнал, связанных соответственно с первым и вторым маятниками. Преобразователи 15-18 включены в мостовую схему через переключатель прямого и обратного соединения их общих выводов 17 и 18. Маятник 8 выполнен в виде груза, который сбалансирован в вертикальном положении относительно оси 1 и связан с первым маятником через пружины 9 и 10, выполненные противодействующими. Для увеличения поверхностного жидкостного трения радиальная поверхность маятника 8 выполнена в виде ребер, перпендикулярных оси 1 вращения маятников. 4 ил. 1 с. 2 з.п.ф-лы.
| Интегрирующий акселерометр | 1982 |
|
SU1099286A2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для измерения углов наклона | 1985 |
|
SU1434255A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
