СП
со
| название | год | авторы | номер документа |
|---|---|---|---|
| Механическое вычислительное устройство | 1988 |
|
SU1515177A1 |
| Механическое вычислительное устройство | 1988 |
|
SU1661798A1 |
| Механическое вычислительное устройство | 1985 |
|
SU1283800A1 |
| Способ контроля профиля зуба зубчатых колес и устройство для его осуществления | 1980 |
|
SU1145938A3 |
| Шаговый электродвигатель с колеблющимся ротором | 1989 |
|
SU1628159A1 |
| Устройство для преобразования угловых координат | 1986 |
|
SU1372334A1 |
| Механическое вычислительное устройство | 1976 |
|
SU580557A1 |
| Регулируемое лекало | 1973 |
|
SU500081A1 |
| Устройство для указания местоположения географических пунктов | 1988 |
|
SU1738103A3 |
| Штриховально-прессовальная машина | 1985 |
|
SU1341053A1 |
Изобретение относится к вычислительной технике и может быть использовано в качестве вычислительного блока в учебном процессе. Целью изобретения является расширение функциональных возможностей за счет обеспечения нахождения координат прямой в пространстве. Устройство имеет корпус, с помощью опор которого соединены два блока определения положения точки в пространстве. Каждый блок содержит установленные в опорах корпуса два ходовых винта с гайками, к которым прикреплена первая планка-направляющая со стрелкой-указателем, два ходовых вала с ручками, установленные в соответствующих опорах, закрепленные параллельно ходовым винтам и снабженные подвижной вдоль них и неподвижной парой зубчатых колес. Каждая пара сцеплена с зубчатыми ползунами, размещенными на первой и второй планках - направляющих. Вторая планка-направляющая жестко зацеплена на опорах ходовых винтов, а ползуны, установленные на ней, снабжены стрелками-указателями. Третий ходовой вал сцеплен с расположенными перпендикулярно ходовыми винтами, размещенные на первой планке-направляющей зубчатые ползуны одного блока соединены регулируемыми по длине жесткими связями с соответствующими зубчатыми ползунами другого блока. 2 ил.
Изобретение относится к вычислительной технике и может быть использовано в качестве вычислительного блока в учебном процессе.
Целью изобретения является расширение функциональных возможностей за счет обеспечения возможности нахождения координат прямой в пространстве.
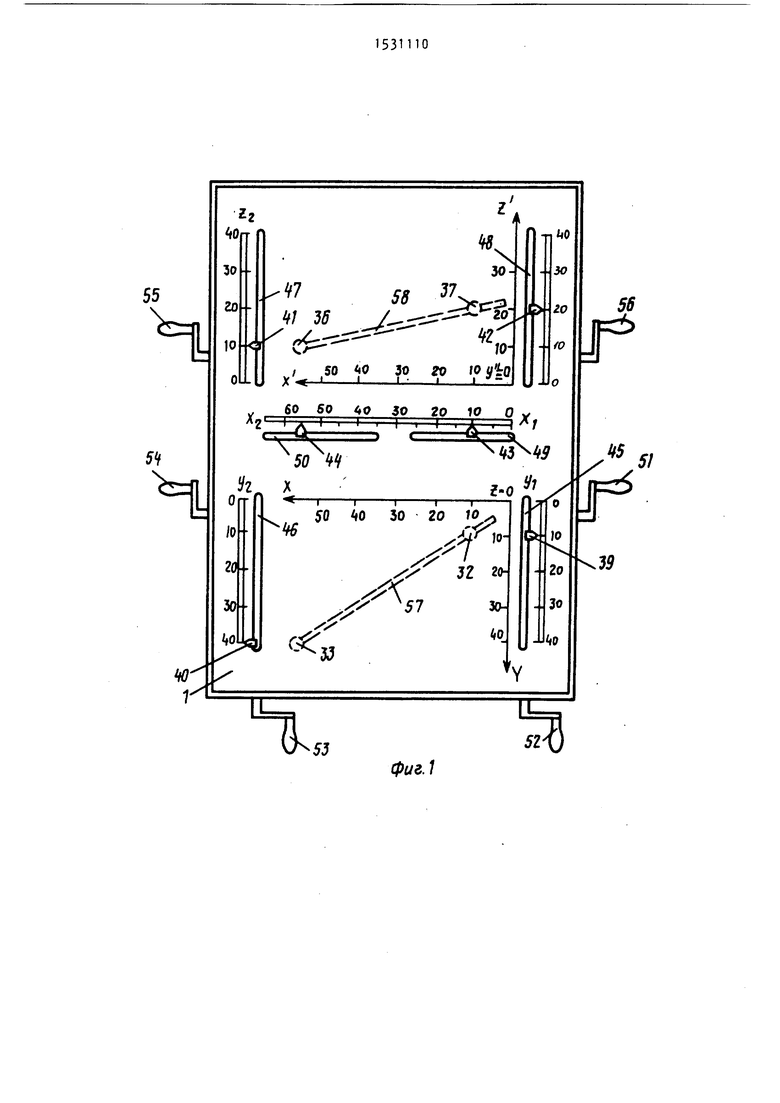
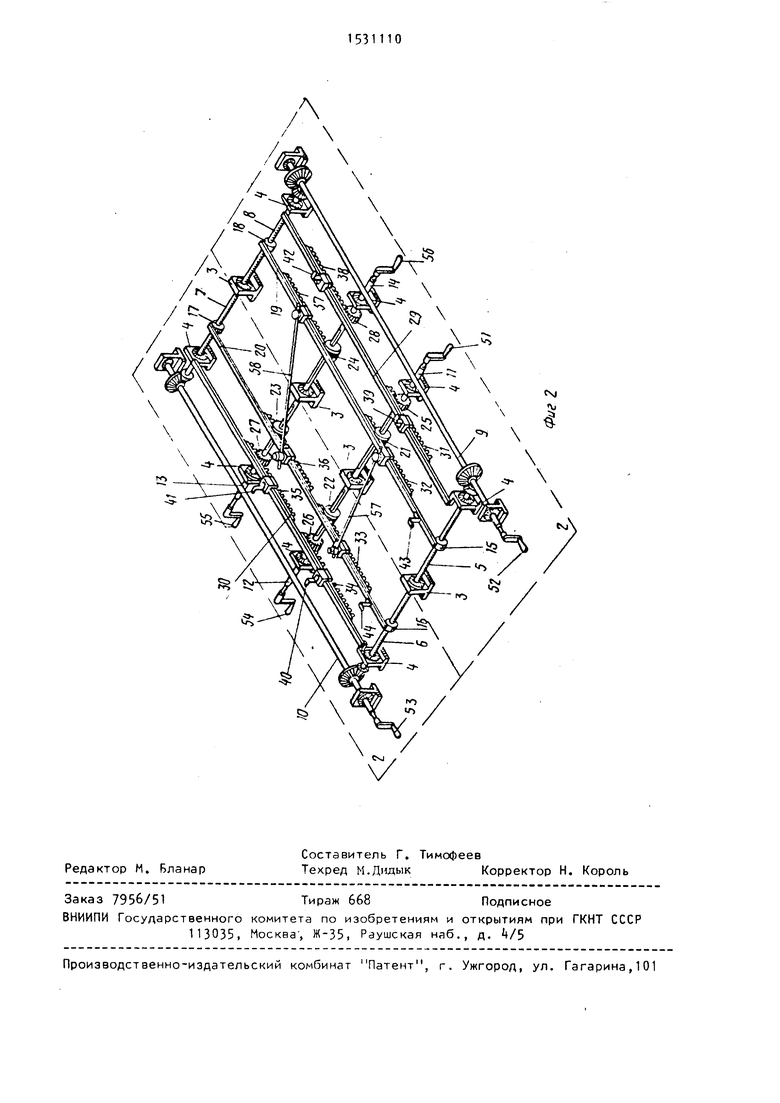
На фиг. 1 показано устройство в сборе, вид сверху; на фиг. 2 - кинематическая схема устройства.
Устройство (фиг.1-2) содержит корпус 1 , два блока 2 определения положения точки, в пространстве, опоры 3 и , на которых смонтированы ходовые винты с общим приводом от ходовых валов 9 и 10, а также ходовые валы 11-1.
На винтах 5-8 имеются резьбовые гайки , которые попарно несут планки-направляющие 19 и 20. Каждый из валов снабжен подвижными
315
вдоль их осей зубчатыми колесами 21- 2 +, а также неподвижно закрепленными на них зубчатыми колесами 25-28.
На подшипниковых опорах 4 ходовых винтов 5-8 закреплены вторые планки- направляющие 29 и 30, при этом как планки 19 и 20, так и планки 29 и 30 снабжены подвижными (перемещаемыми) вдоль их оси зубчатыми ползунами 31- 38. На ползунах 31,3 +,35 и 38 установлены стрелки-укзатели соответственно (для установления заданных числовых величин по осям OY и OZ), а на левых (почертежу) концах планок 19 и 20 смонтированы стрелки-указатели k3 и для задания числовых величин по оси ОХ.
Опоры 3 дополнительных валов выполнены двухстороннего действия, т.е. несут два независимых упорных подшипника .
С целью свободного перемещения указателей по осям ОХ, ОУ, и OZ в корпусе крышки выполнены соот- ветствующие пазы 45-50 с градуированной шкалой каждая. Кроме того, валы 11-1 и винты 5-8 снабжены приводными ручками 51-56 для их вращения, а ползуны 32-37 соединены жесткими связями 37 и 58 соответственно.
Устройство работает следующим образом.
При заданном значении переменной X ручку 52 вала 9 вращают до тех пор, пока указатель 3 (фиг.1) на планке 19 установится против данной числовой величины по шкале оси абсцисс ОХ.
Так находят одну точку прямоР в отношении оси абсцисс. Затем вращением ручки 51 вала 11 устанавливают указатель 39 против заданного числового значения по шкале оси ординат OY для нахождения точки в отношении этой оси. В конце вращением ручки 56 устанавливают указатель 2 против числового выражения по оси аппликат OZ.
Аналогичные действия повторяют для установки заданных значений Х,, У, и Z, по осям ОХ, ОУ и OZ, используя ручки 53-55 для перемещения ука-
04
зателей kt ,kO и Al с целью установления тех же параметров для второй точки.
Таким образом, подавая на вход механизма сразу шесть переменных величин по координатам Х,У и Z, получают проекции отрезков прямых, каковыми в любом случае являются жесткие связи 57 и 58,
«
n
5
0
0
Формула изобретения
Механическое вычислительное устройство, содержащее корпус, опоры и регулируемые между собой по длине жесткие связи, отличающее- ся тем, что, с целью расширения функциональных возможностей за счет обеспечения возможности нахождения координат прямой в пространстве, в него введены соединенные с помощью опор два блока определения положения точки в пространстве, причем каждый лз них содержит установленные в опорах корпуса два ходовых винта с гайками, к которым прикреплена первая планка- направляющая с закрепленной на ней стрелкой-указателем, два ходовых вала с ручками, установленные в соответствующих опорах, закрепленные параллельно ходовым винтам и снабженные подвижной вдоль них и неподвижной парами зубчатых колес, каждая из которых зацеплена с зубчатыми ползунами, размещенными на первой и второй планках-направляющих, вторая планка-направляющая жестко зацеплена на опорах ходовых винтов, а зубчатые ползуны, установленные на ней, снабжены стрелками-указателями, третий ходовой вал зацеплен с расположенными перпендикулярно ходовыми винтами, расположенные на первой планке- направляющей зубчатые ползуны одного блока определения положения точки в пространстве соединены жесткими связями с соответствующими зубчатыми ползунами другого блока определения положения точки в пространстве.
55
Ч
5
Ч
w г
«
5/
фиг.1
fsi
| Лебедев А.Н | |||
| Счетно-решающие устройства.-М.: Машиностроение, 1Э66, с | |||
| Устройство для усиления микрофонного тока с применением самоиндукции | 1920 |
|
SU42A1 |
| Механическое вычислительное устройство | 1985 |
|
SU1283800A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
